伴隨發動機起動的混合動力模式切換控制
2020-01-04 02:58:56張幽彤單小明
汽車工程 2019年12期
楊 業,張幽彤,單小明
(1.北京理工大學清潔車輛實驗室,北京 100081; 2.華北理工大學輕工學院,唐山 063000)
前言
由于環境和能源危機,混合動力汽車備受青睞[1-3]。多動力源是混合動力汽車最顯著的特點,其關鍵技術直接決定了混合動力汽車的經濟性、可靠性、安全性和舒適性。混合動力汽車運行過程中,為了提高燃油經濟性,需要在各種運行模式之間頻繁地轉換,然而,模式轉換常常伴隨著發動機、離合器和電機的目標轉矩突變,造成汽車傳動系統的振動和沖擊,從而影響汽車行駛的舒適性。
在模式切換過程中,轉矩補償控制策略是一種常用的轉矩協調控制方法[4-5]。其利用電機的快速響應特性對發動機的輸出遲滯轉矩進行補償,以減小模式轉換過程的轉矩波動,從而提高舒適性。文獻[6]中提出了一種模型匹配控制方法,其控制思想類似于轉矩補償控制策略。Hwang等[7]針對混合動力離合器結合的模式切換過程,提出發動機和電機的動態轉矩控制策略,即在離合器結合之前,采用發動機轉速控制策略;在離合器接合過程中,采用電機轉矩控制策略。Koprubasi[8]和趙治國等[9]采用基于混雜系統的無擾動切換控制算法,實現由純電動起步到發動機參與驅動模式的混合動力模式切換仿真分析,驗證了無擾動切換控制算法能夠有效減少模式切換過程的沖擊度。
清華大學童毅[10]和吉林大學嚴運兵等[11]針對并聯混合動力中發動機與電機響應的差異問題,在整車轉矩管理策略的基礎上,提出了“發動機轉矩開環+發動機動態轉矩估計+電動機轉矩補償”的模式切換動態協調控制策略,解決模式切換中的動態差異造成的沖擊問題。這種控制策略仍然是組合式的設計思維,依賴于對發動機動態轉矩的精確估計,應用于涉及發動機起動過程的模式切換動態控制中的效果并不理想。近年來,相關學者采用動態協調控制策略對混合動力系統模式切換造成的沖擊進行研究[12-14]。Kimura等[12]利用行星齒輪機構直接測量發動機轉矩,然后采用電動機轉矩對發動機轉矩進行調整,較好地解決了動態模式切換過程中的發動機轉矩估計和補償問題。Ngo等[13]應用動態規劃和最小值原理對發動機和電機轉矩進行動態協調控制,提高了整車行駛平順性。
目前的研究往往集中于降低系統狀態切換頻率或者直接采用電機轉矩補償的方式,一方面影響了經濟性,另一方面也無法滿足同軸并聯結構形式下的狀態切換控制需求[15-17]。已有研究應用系統理論對混合動力系統動態切換問題進行研究,但這些研究中所涉及的車輛都配置有ISG或BSG電機,能夠在狀態切換前將發動機起動。而本文中研究的同軸并聯混合動力系統不單獨配置發電機,也取消了專有的發動機起動機,這就需要建立一個考慮發動機起動的狀態切換協同控制策略,針對發動機起動和并載進行全面系統化研究。
基于上述分析,本文中以同軸并聯的混合動力系統為研究對象,引入狀態空間理論,對模式切換前后各個狀態進行數學表征,建立狀態方程并進行適當的矩陣變換,以系統切換代價函數為優化對象,對各個狀態切換過程進行優化求解,獲取最優控制變量。從而建立系統的動態協同控制策略。
1 動力系統
1.1 動力系統結構
同軸并聯混合動力客車動力總成包括:天然氣發動機、離合器、電動機和自動機械式變速器(AMT),如圖1所示。其中發動機和電機通過離合器同軸相連,發動機和電機既可單獨驅動車輛,也可混合驅動車輛,并且兼具制動能量回收功能。
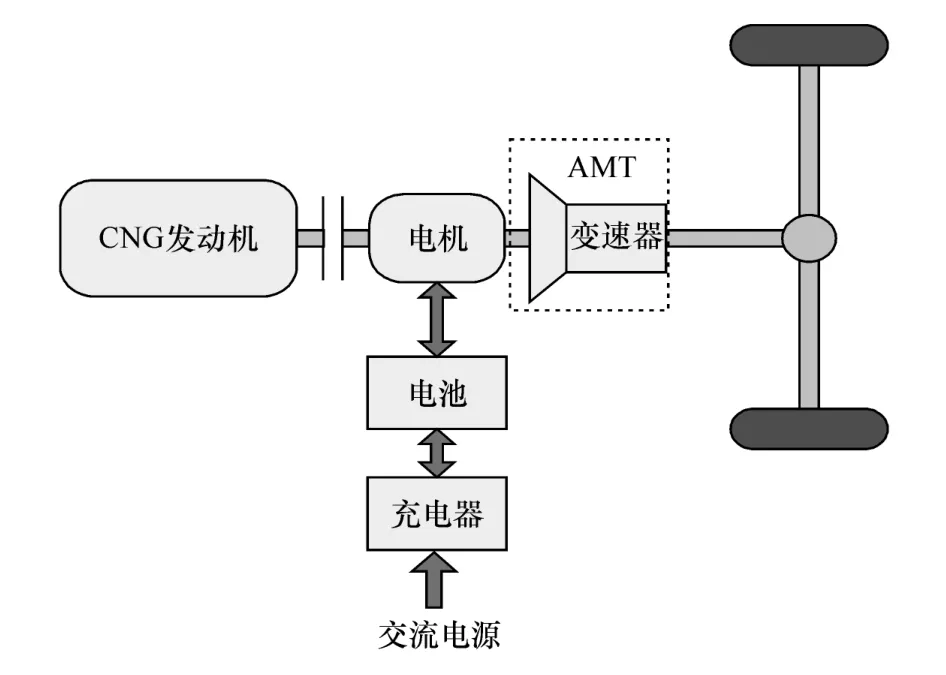
圖1 單軸并聯混合動力系統
根據同軸并聯混合動力系統的結構圖可知,該混合動力系統具有5種典型的工作模式,如表1所示:純電動、發動機單獨驅動、混合驅動、行車充電和制動能量回收模式。實際運行時,根據不同的工況,混合動力系統在各個模式之間來回切換,保證發動機的工作效率,從而降低油耗和污染物排放。不同模式切換過程中,由于發動機和電機、電機和摩擦制動系統的動態響應特性等差異,往往會引起驅動力或制動力輸出的轉矩和轉速波動問題,從而造成車輛縱向沖擊,其中,由純電動模式切換到混合驅動模式時,伴隨著發動機的起動和并載過程,對整車傳動軸的沖擊更為明顯,因此,針對動力耦合過程中的沖擊問題,本文中借鑒狀態空間理論的基本思路,提出動態轉矩協調控制策略,降低沖擊,提高整車駕乘舒適性。
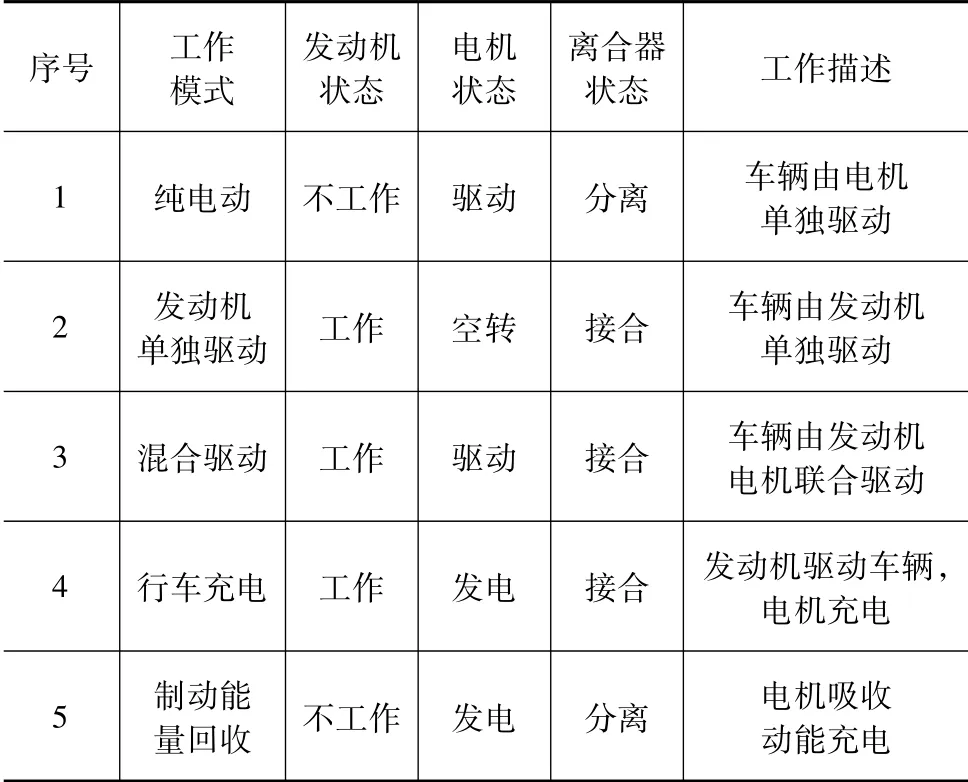
表1 同軸并聯混合動力系統基本運行模式
1.2 動力系統模型
1.2.1 車輛縱向動力學模型
根據車輛行駛過程中的動力學平衡關系,車輛在車輪上需求的牽引力Ft為

式中:Fi為車輛沖擊力;Fro為滾動阻力;Fl為空氣阻力;Fst為坡度阻力。它們可分別表示為
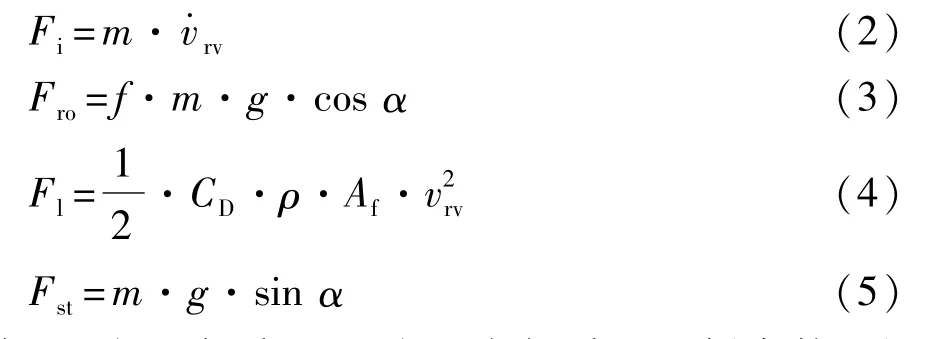
式中:m為整車質量;g為重力與質量比例常數(取9.8 N/kg);f為滾動阻力系數;ρ為空氣密度;CD為風阻系數;Af為車輛迎風面積;α為坡道角度;vrv為車輛行駛速度。
由式(1)計算出車輪需要的牽引力后,可得到主減速器需求轉矩:

式中:rwh為動態車輪半徑;Jwh為車輪轉動慣量;Twh,loss為車輪中轉矩損失;wwh為車輪角速度;w·wh為車輪角加速度。
1.2.2 傳動系統模型
傳動系由離合器、變速器、減速器和半軸組成。其中,離合器模型根據其分離、滑摩、接合3種狀態來建立。在分離狀態下,動力傳遞為零;在接合狀態下,動力等值傳遞;在滑摩狀態下,傳遞的轉矩計算如下:

式中:μclu為動態摩擦因數;Rclu為摩擦盤的有效半徑;Aclu為摩擦盤的有效摩擦面積;pclu為離合器接合壓力;Δω為離合器主從動盤的相對滑摩速度;ε為轉速閾值。
半軸對車輛動力傳動系統的最低共振頻率振動有重要影響,因此,半軸的動態特性如下:

式中:Khs為半軸的剛度;θhs為半軸的扭轉位移;bhs為半軸的阻尼系數;Δωhs為半軸兩端的速度差。
變速器在動力傳動系統中占有重要的位置,其通過改變傳動比來滿足車輛在不同行駛條件下對牽引力的需求。減速器的作用是將變速器輸出的轉矩和轉速傳遞到驅動輪,其結構和變速器類似,但傳動比固定。因此,為了簡化采用總傳動比代替變速器和減速器。變速器輸入端速度ωM與車輪轉速ωW的關系可表示為

式中itr為傳動系統總傳動比。
1.2.3 發動機和電機模型
發動機和電機采用實驗建模法。實驗建模法簡單有效,模型數據可以通過性能實驗獲得。在不考慮發動機的溫度影響的情況下,依據選定的發動機萬有特性和電機效率特性建立發動機模型和電機模型。圖2和圖3分別為天然氣發動機萬有特性圖和電機效率特性圖。
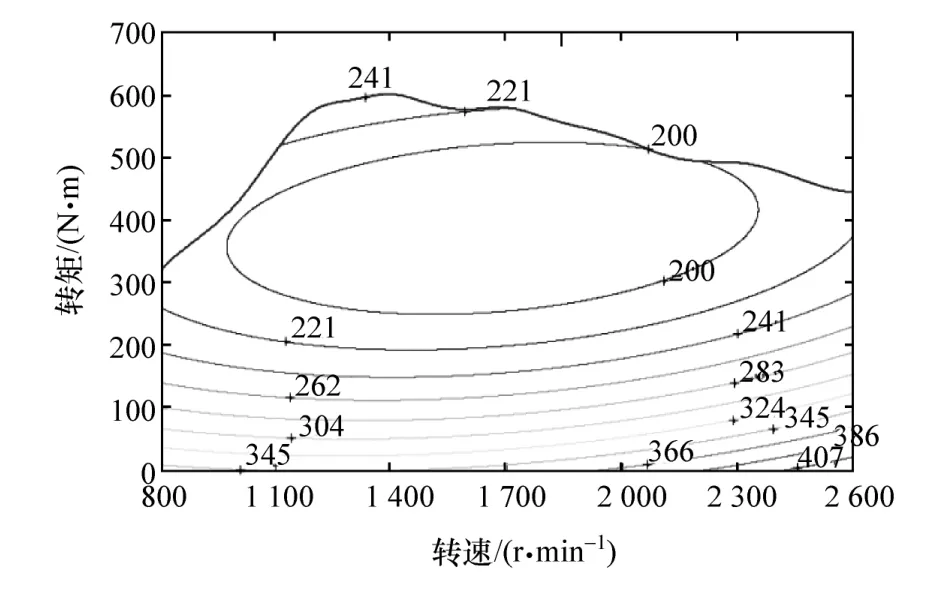
圖2 天然氣發動機萬有特性圖
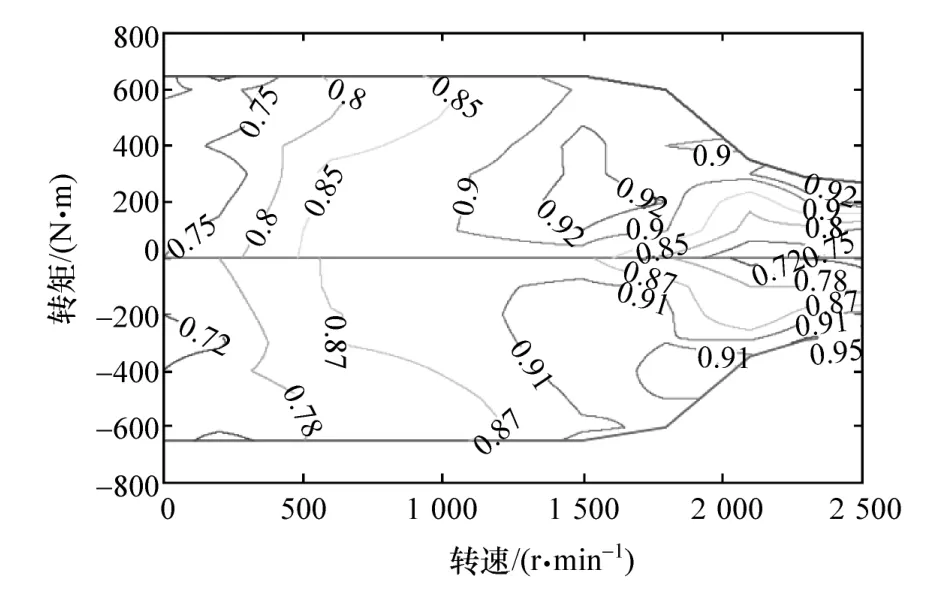
圖3 電機效率特性圖
2 控制策略
2.1 狀態空間切換模型
針對所研究的同軸并聯混合動力城市客車,采用狀態空間切換控制理論對多模式切換過程進行分析。該問題的研究對象為一組通過狀態相關微分方程表征的狀態切換系統,包含m個不同狀態,可表示為

式中∑i為整個動態切換系統的第i個狀態。每一個狀態都通過6元數組進行定義:

式中:Xi為相關的狀態空間;Pi為輸入變量的有限集;Ui為狀態空間的控制變量;Fi為在第i個模式的狀態空間Xi中描述連續演變的映射;Sji為第i個狀態向第j個狀態切換時開關信號;Tji為第i個狀態向第j個狀態切換時對應的切換規則。
在每一狀態下建立一個從狀態i到狀態j的狀態切換代價函數Jji,且有:

圖4為狀態空間切換過程的示意圖。處于第i個狀態的系統狀態軌跡達到切換集合Sji后隨即發生模態轉換,如果滿足了切換規則Tji,使狀態從Xi切換到Xj,狀態變換后,新的矢量場Fj控制著狀態空間Xi向Xj的演變。
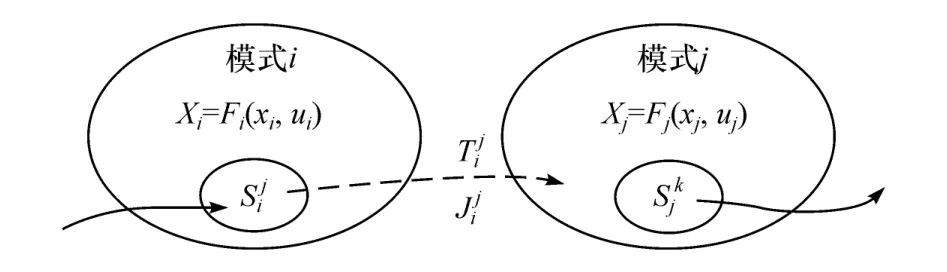
圖4 狀態空間動態切換過程示意圖
根據同軸并聯混合動力系統的結構特點,將純電動模式向混合驅動模式切換過程劃分為4個狀態,分別為:發動機停機下的純電動狀態、離合器半接合發動機拖轉狀態、離合器接合發動機并載狀態和完成并載進入混動狀態等4個狀態。其切換過程如圖5所示,Xi分別用來描述4種模式所對應的狀態空間。
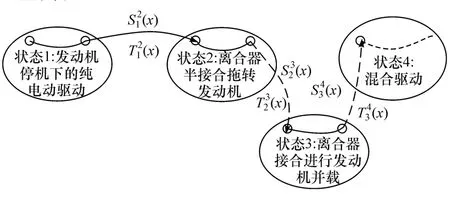
圖5 純電動至混合驅動模式切換過程示意圖
狀態轉移條件Sji定義為
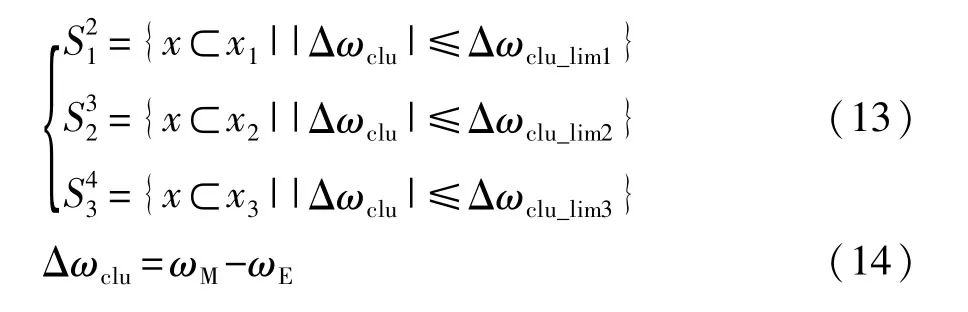
式中:Δωclu_lim1,Δωclu_lim2,Δωclu_lim3分別為離合器開始接合和接合完成時主、從動盤間的轉速差的閾值,即當離合器主、從動盤轉速差低于閾值Δωclu_lim1時,S21被觸發,離合器開始接合,發動機處于拖轉狀態;當離合器主、從動盤轉速差低于閾值Δωclu_lim2時,S32被觸發,離合器接合完畢,發動機進入并載過程;當離合器主、從動盤轉速差低于閾值Δωclu_lim3時,S43被觸發,發動機并載完成,系統進入混合驅動模式。
選取發動機轉速ωE、電機轉速ωM、車輪轉速ωW和半軸扭轉位移θhs為狀態變量,即

選取發動機轉矩TE和電機轉矩TM為狀態變量,即

同軸并聯混合動力系統模式切換過程的主要執行部件為離合器,切換過程中希望離合器快速平穩,其主動和從動盤的轉速盡量同步,據此可以定義切換過程的代價指標函數為
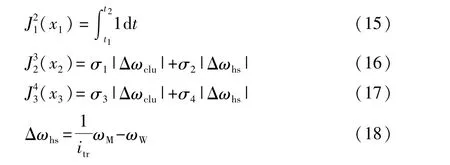
式中:Δωhs為半軸輸入輸出速差,即半軸的偏轉率;σ1,σ2,σ3和σ4為權重因子。
采用上述模型和代價指標函數對系統切換過程進行表征后,動態過程平順性控制問題就可以簡化為對代價指標的最小化問題。通過對J21的最小化,使離合器拖起發動機所用時間最短,通過最小化J32實現發動機和離合器轉速的快速收斂,通過最小化J43實現變速器和驅動軸等動力傳動系統的輸出轉矩在離合器接合完成后保持穩定狀態。
2.2 模式切換
2.2.1 發動機停機下的純電動狀態
車輛工作于純電動模式時,發動機停機,離合器處于分離狀態,電機單獨驅動車輛,此狀態下,各個狀態變量的動力學特性可表示為
式中:IM′為永磁同步電機及其固連機構的綜合轉動慣量,包含轉子轉動慣量、離合器的電機端(摩擦片)轉動慣量和自動變速器輸入端的轉動慣量;IW′為車輪轉動慣量和車輪慣性等效轉動慣量之和;bM為電機輸出軸等效阻力。
狀態1向狀態2切換時,控制算法的核心是最小化代價指標函數J21,即在快速響應的前提下盡可能減小發動機拖起的時間。在此階段,由于離合器從分離狀態變為部分接合狀態,發動機僅作為一個與轉速相關的負載出現,因此驅動電機除了滿足整車動力需求外,還需要輸出額外的轉矩用于克服發動機阻力矩。此時,發動機和電機轉矩輸出應滿足:

式中:Tdem為整車需求轉矩;bE為發動機輸出軸的等效阻尼。
2.2.2 離合器半接合發動機拖轉狀態
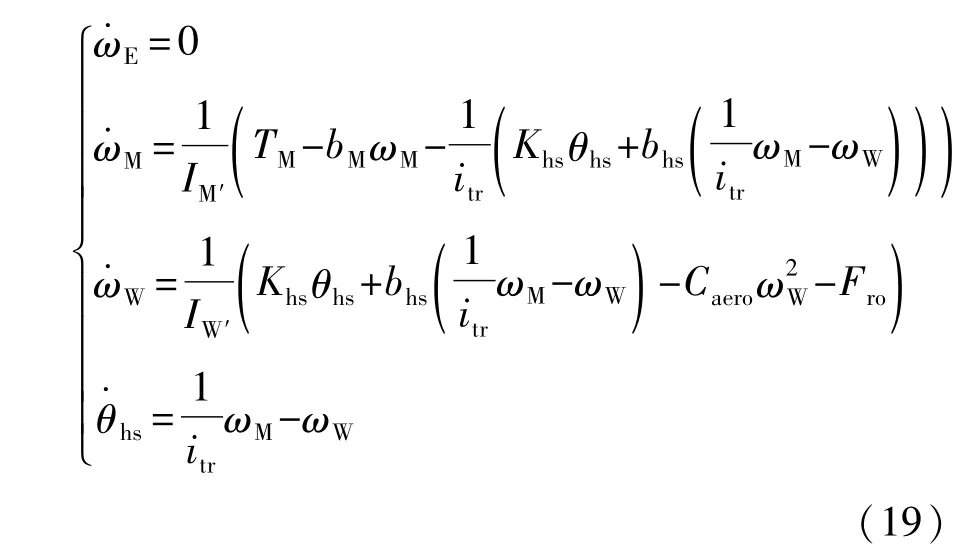
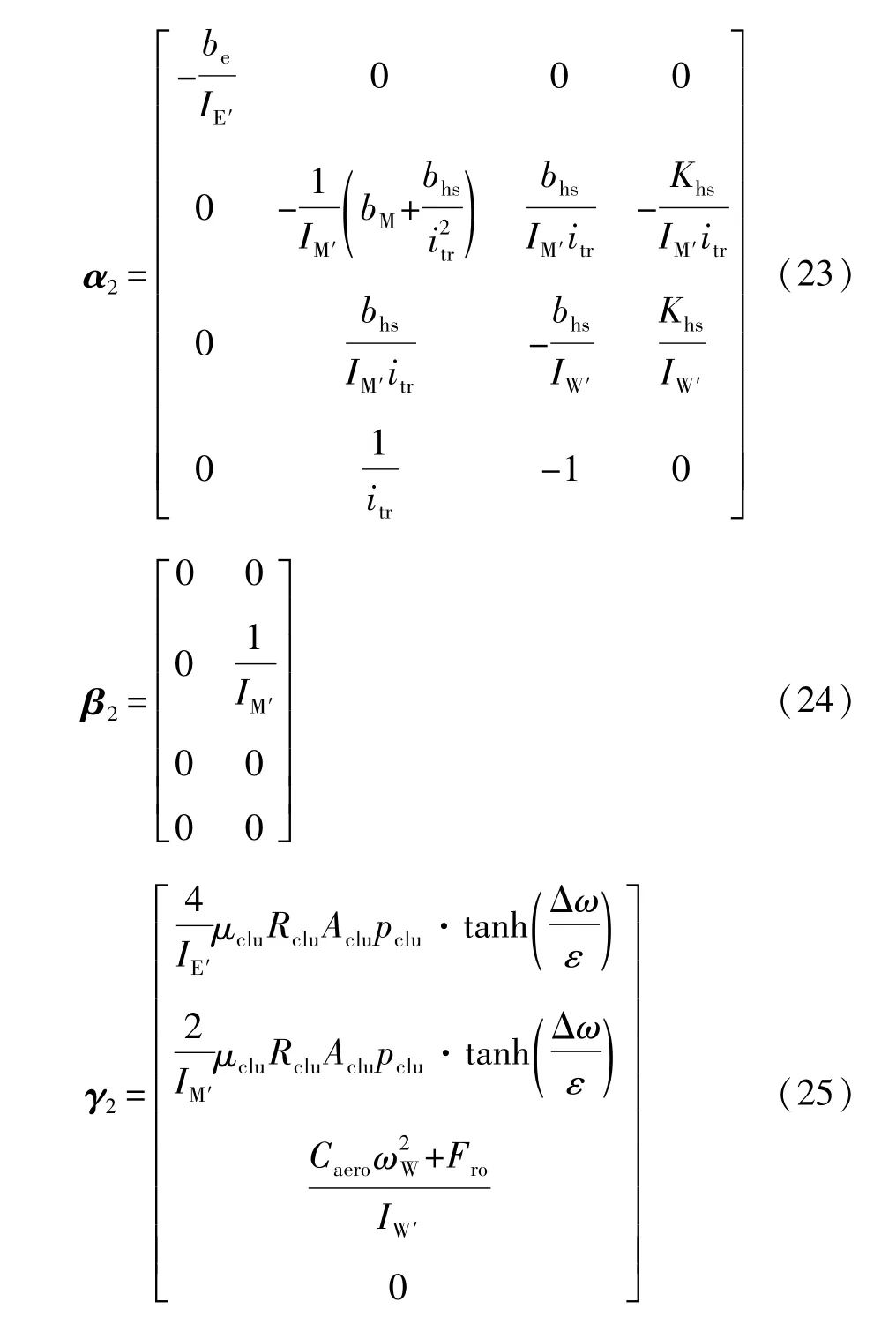
對離合器半接合狀態進行控制的目標是使發動機轉速能迅速升至目標起動轉速,并盡量降低此過程中的轉矩振動。在離合器接合過程中發動機迅速轉動,但是由于此時發動機僅作為負載,未與下游動力系統發生動力耦合。此狀態下,各個狀態變量的動力學特性可表示為
對應的狀態方程為

其中
當狀態空間發生轉移時,對于性能指標矩陣z2則有
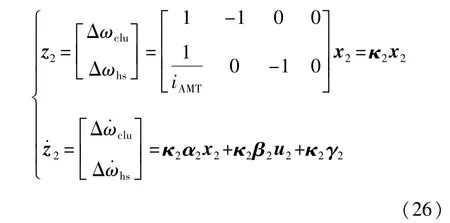
其中

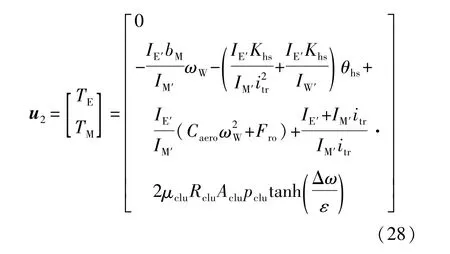
按照等式約束下的拉格朗日型最優解條件,可以求得控制變量u2使代價指標函數J32達到最小化:
2.2.3 離合器接合及發動機并載狀態
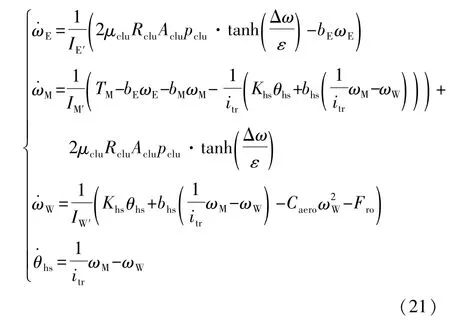
對離合器接合過程進行控制的目標是使發動機轉速能迅速與驅動電機轉速匹配,即離合器主、從動盤的轉速迅速達到一致并盡量降低此過程中的轉矩振動。由于離合器接合過程的滑摩特性,動力傳遞要經歷一個非線性延遲過程,發動機轉矩隨著離合器的接合逐漸與后續動力系統耦合,而驅動電機的轉矩逐漸降低,以保證并載過程中相對穩定的動力輸出。此狀態下,各個狀態變量的動力學特性可表示為

該過程的狀態方程為

同樣的,可以求得控制變量u3使代價指標函數J43達到最小化:

2.2.4 混合驅動狀態
發動機并載過程結束后,整車進入混合驅動模式,發動機與驅動電機共同驅動車輛運行。此狀態下,各個狀態變量的動力學特性可表示為
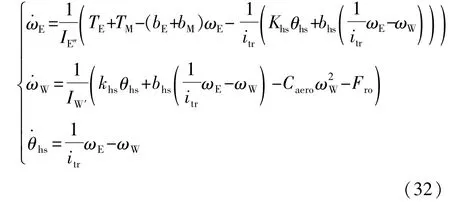
式中:IE′為自動變速器輸入軸前端的綜合轉動慣量,包含發動機、離合器、永磁同步電機和變速器輸入端的轉動慣量。
進入混合驅動模式后,發動機輸出端與電機輸入端通過離合器剛性連接,轉速相同,發動機和電機的共同輸出轉矩滿足車輛轉矩需求。

車輛運行于混合驅動模式時,整車控制單元根據當前工況由上層能量管理策略分配轉矩指令,發送給電機和發動機。因此,此時的控制規則可定義為

式中Tes為整車能量管理策略分配的發動機轉矩。
3 實驗研究
3.1 臺架組成
為驗證本文的控制策略,建立同軸并聯混合動力系統實驗臺架,臺架布置方案如圖6所示。本文中設計的混合動力系統實驗臺架采用同軸的方式將天然氣發動機、永磁同步電機、自動變速器和測功機連接起來。實驗臺架布置實物如圖7所示。除以上動力連接部件之外,動力系統實驗臺架還包括動力電池組及其管理系統、冷卻水控制系統、電機控制器、電控單元在線標定系統、總線監測系統和油門踏板等信號的模擬裝置等,動力系統主要部件參數如表2所示。
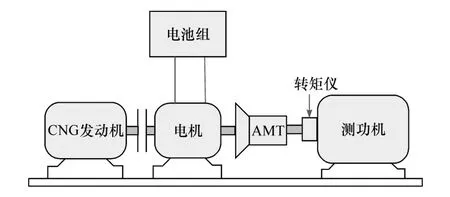
圖6 布置方案

圖7 實驗臺架實物圖
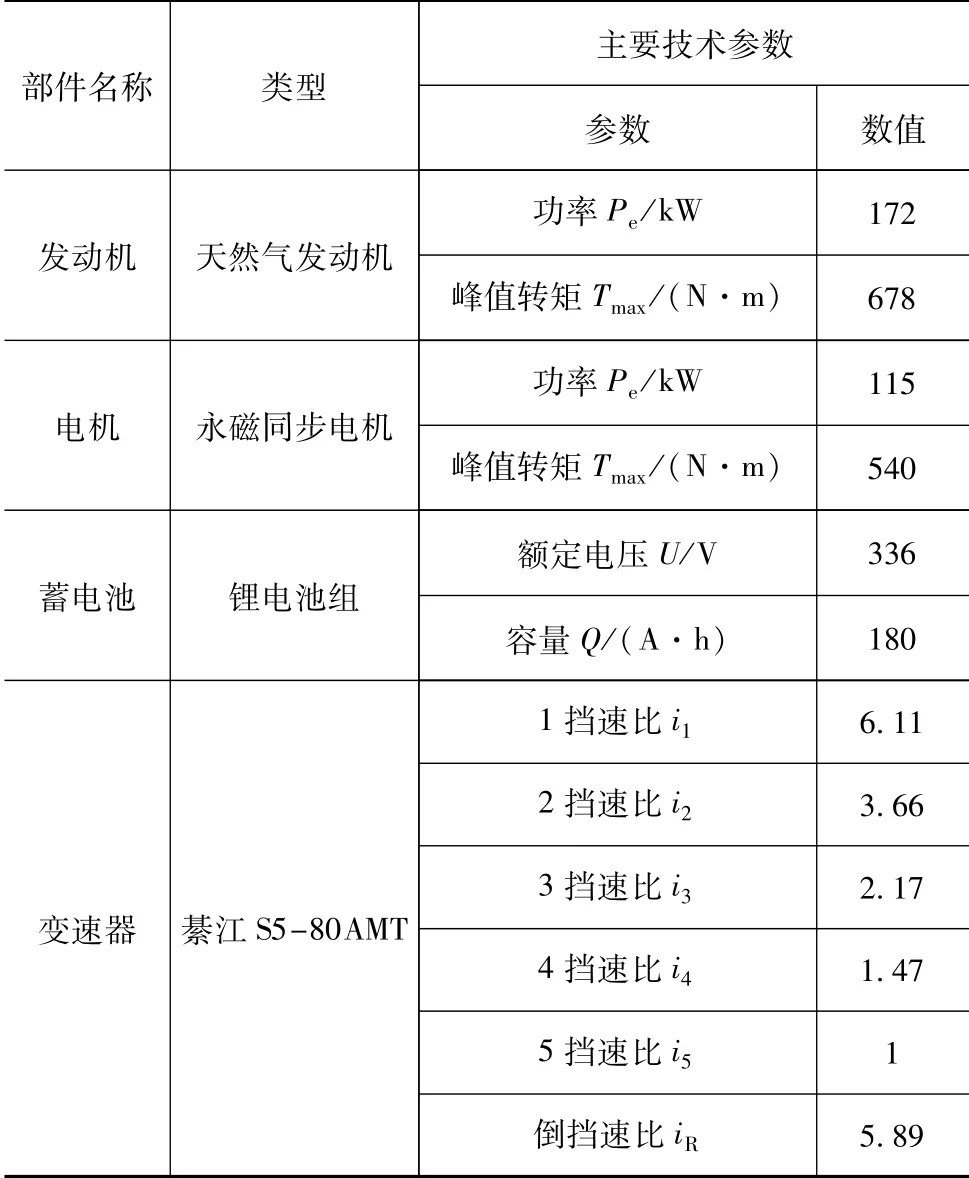
表2 混合動力系統主要部件及參數
3.2 臺架實驗
為驗證本文中提出的控制策略的有效性,分別采用傳統的電機轉矩補償策略和本文中所設計的動態協調控制策略進行對比實驗,獲取相應的實驗曲線。
模式轉換過程中的評價指標主要包括乘坐舒適性和快速性。乘坐舒適性是指在模式轉換過程中,由于車輛加速度變化引起的沖擊,它可表示為車輛加速度的變化率,即

式中:J為車輛沖擊度,m/s3;a為車輛加速度,m/s2。沖擊度越小,車輛駕駛舒適性越好。
快速性是指模式轉換的持續時間,時間越短,模式切換速度越快。
3.2.1 電機轉矩補償策略
圖8和圖9為電機轉矩補償策略下的實驗結果。具體實施步驟采用文獻[18]中的方法,即離合器接合之前無控制策略,離合器接合后,利用電機的快速響應特性對發動機的輸出轉矩進行補償。如圖9(b)所示,離合器從18 s開始接合,到19.2 s接合完成,共用時1.2 s。在離合器接合過程中,電機在驅動車輛的同時拖轉發動機,由于發動機起動阻力矩和電機補償的時間差影響,電機轉速及車速被短暫的下拉,出現類似于制動的現象,整車平順性瞬間惡化,出現較大的沖擊。從圖8中可以看出平順性惡化的時間大約持續0.7 s左右,但是由于沖擊幅度較大,會導致車輛駕駛員和乘客感受比較明顯。
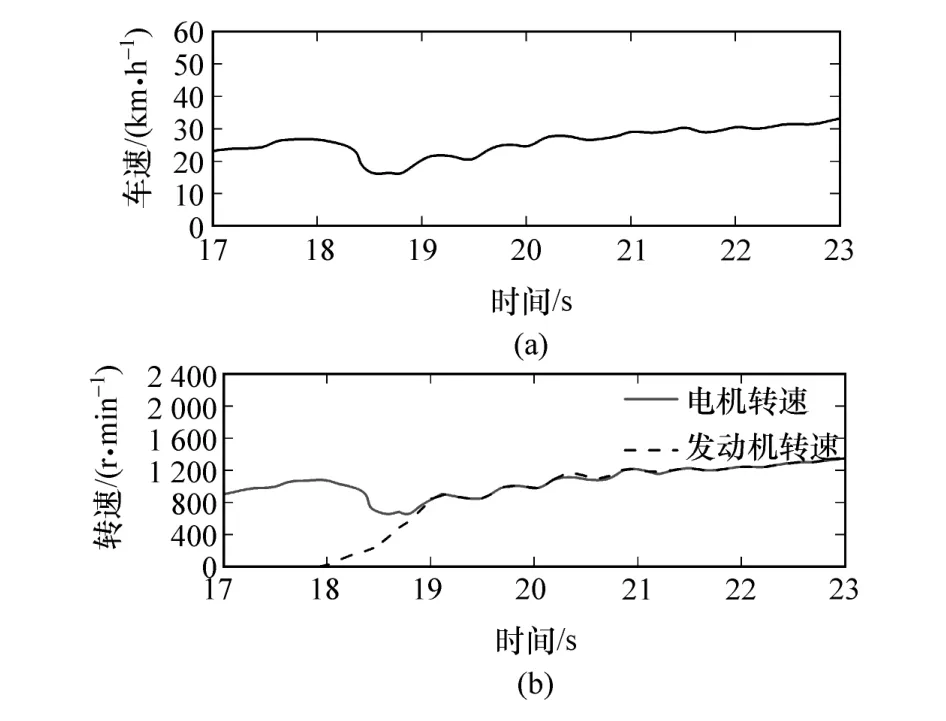
圖8 電機轉矩補償策略下的速度曲線
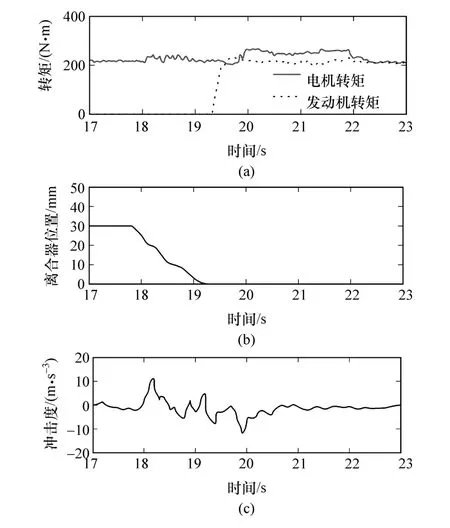
圖9 電機轉矩補償策略下的實驗結果
如圖9(c)所示,沖擊主要出現在離合器接合階段、發動機起動階段和發動機轉矩并載階段。其中最大沖擊度為-14.2 m/s3,出現在離合器初始接合階段。離合器接合過程經歷滑摩階段和鎖止階段。在滑摩初始階段,離合器快速接合,離合器摩擦轉矩增大,快速增加的摩擦轉矩作為振動激勵源作用在傳動軸上,因此,振動被激發。此外,從滑摩階段過渡到鎖止階段時由于離合器摩擦轉矩突然改變,這種變化會對傳動軸產生另一個大的沖擊,所以振動會持續到鎖止階段。從圖9(a)中可以看出,在離合器完全接合以后,發動機轉速才達到起動轉速,即發動機在19 s才開始噴油點火,此時,發動機起動轉矩會造成動力傳動系統振動,后續的發動機轉矩并載也會引起沖擊。到20.5 s左右,發動機并載完成,整車進入混合驅動模式。整個模式轉換時間共歷時2.5 s。
3.2.2 動態協調控制策略
圖10和圖11為動態協調控制策略下的實驗結果。如圖10所示,在模式切換過程中電機轉速有瞬間的上拉趨勢,車速也有小的波動。但從整個狀態切換過程來看,整體幅度遠低于傳統的電機轉矩補償策略的情況。如圖11(c)所示,整個切換過程的沖擊度控制在10 m/s3以內,滿足整車平順性需求。其沖擊可分成3個階段。
(1)離合器滑摩階段
滑摩階段的起始點為半接合點,即摩擦轉矩與發動機阻力轉矩相等的位置點。半接合點之后,從動盤開始轉動并逐漸加速。發動機轉速隨著離合器轉矩的增大不斷上升,直到達到發動機目標起動轉速。由于離合器接合過程短暫,可認為整車需求轉矩為定值,且動力性損失可暫時忽略,故電機只需要輸出部分定值轉矩給輪軸,另一部分轉矩用以補充給離合器轉矩將發動機快速拖起。如圖11(b)所示,此時電機轉矩為280 N·m,而發動機在轉速同步前全程不輸出轉矩。因此,發動機和電機滑摩過程完全依賴于離合器轉矩大小,且沖擊度也只與離合器轉矩相關。
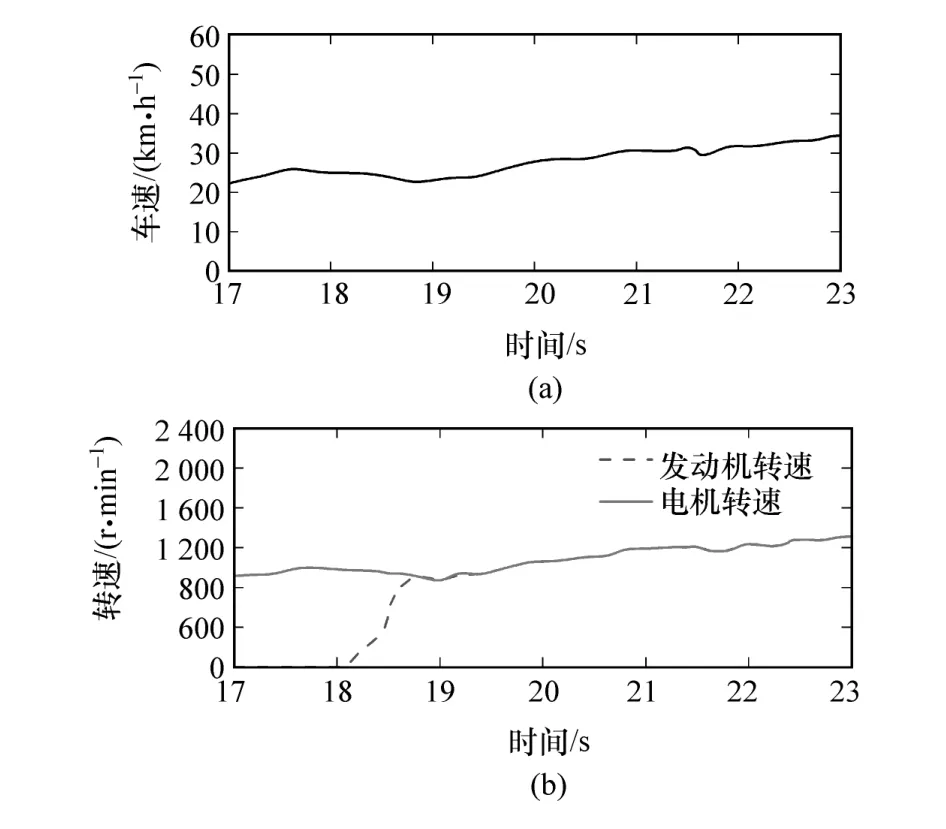
圖10 動態協同控制策略下的速度曲線
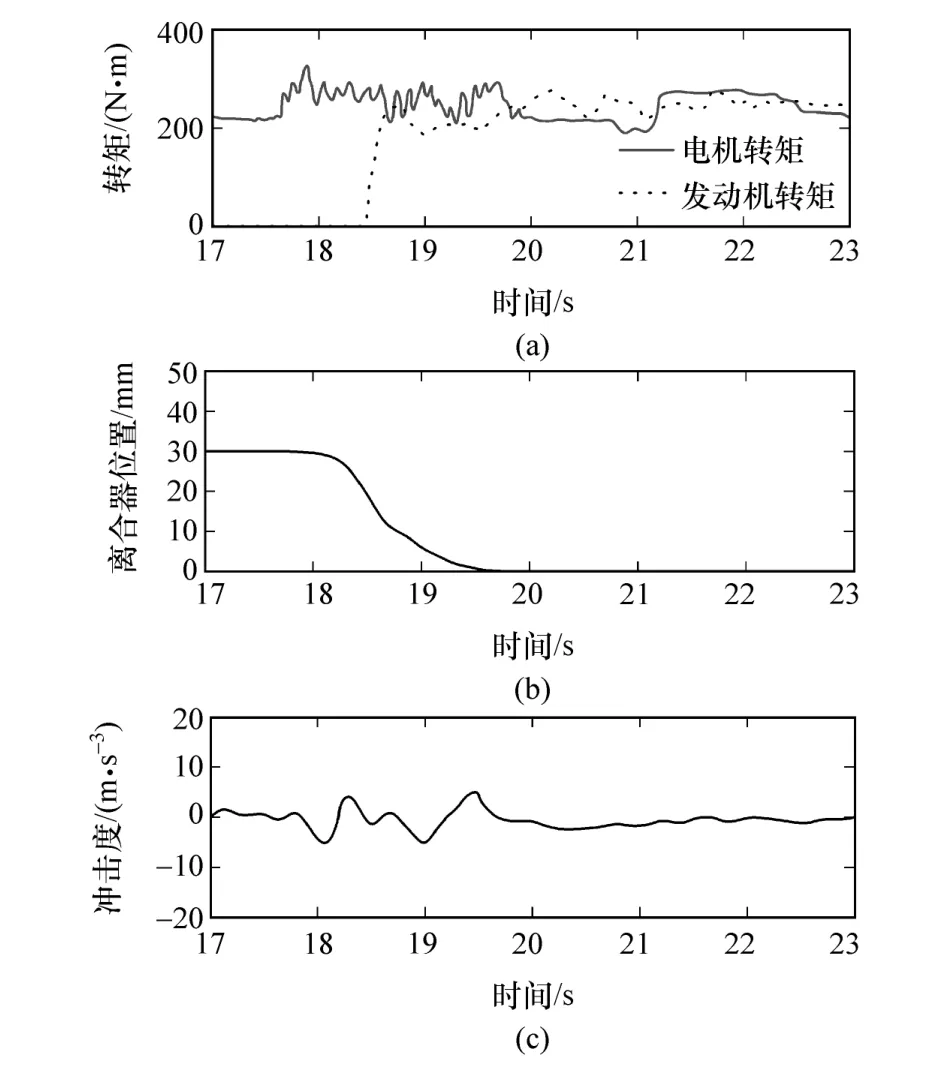
圖11 動態協同控制策略下的實驗結果
(2)發動機起動階段
發動機在800 r/min左右開始噴油點火,如圖11(a)所示,從18.4 s開始起動到18.7 s起動完成。發動機在起動過程中,會產生轉矩脈動,這些脈動轉矩由泵氣轉矩、活塞的摩擦轉矩、往復慣性矩等產生。隨著發動機起動,脈動轉矩會引起動力傳動系統振動,進而導致車輛沖擊。
(3)發動機并載階段
發動機起動完成后,發動機和電機按照上層能量管理策略輸出相應的轉矩共同驅動車輛,由于發動機和電機動態特性的差異,發動機不能及時響應設定的目標轉矩,導致動力輸出端轉速波動,從而引起較大的沖擊。由于采用了動態協調控制策略,電機轉矩及時介入,彌補了發動機轉矩不足,因此沖擊度減小。如圖11(c)所示,在模式轉換過程中3個階段都有沖擊發生,其中,離合器接合階段中的沖擊最大,達到-7.2 m/s3。
表3為兩種實驗方案所產生的模式轉換時間和最大沖擊度對比表。從表3中可以看出,無論是從模式轉換時間方面還是最大沖擊度方面,本文中提出的動態協調控制策略比傳統的電機轉矩補償策略控制效果要好很多,在改善車輛沖擊度方面作用明顯,沖擊度幾乎下降了一半。
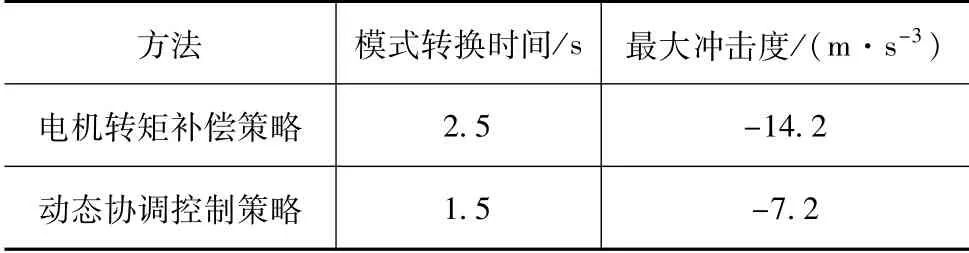
表3 實驗結果對比
4 結論
針對同軸并聯混合動力客車,分析了從純電動模式向混合驅動模式的動態切換過程,基于狀態空間理論將模式轉換過程劃分為4個子狀態,設計了動態協調控制策略。以整車運行縱向沖擊度和模式切換時間為評價指標,通過臺架實驗對所提出的動態協調控制策略進行驗證,并與傳統的電機轉矩補償策略進行對比。實驗結果表明,所設計的控制策略有效抑制了轉速波動,縮短了模式切換時間,減小了整車縱向沖擊度,改善了駕駛性能。
由于同軸并聯混合動力客車工作模式較多,在實車運行中發現:純電驅動至混合驅動模式的切換過程駕駛性問題較為突出,且該過程伴隨離合器、電機及發動機狀態的變化,故本文中僅研究了純電動驅動至混合驅動模式的單向切換過程,沒有考慮其它模式切換過程,系統地解決不同驅動及制動模式間的切換問題,這將是下一步研究的主要內容。
猜你喜歡
汽車維修與保養(2021年8期)2021-02-16 00:28:30
汽車維修與保養(2021年8期)2021-02-16 00:28:18
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
汽車與新動力(2015年1期)2015-02-27 12:11:01
電測與儀表(2014年17期)2014-04-04 11:56:50
汽車與新動力(2014年2期)2014-02-27 12:10:15