矢量水聽器在水下滑翔機上的應用研究
2020-01-08 00:36:02王文龍王超韓梅孫芹東張小川
兵工學報 2019年12期
王文龍,王超,韓梅,孫芹東,張小川
(1.海軍潛艇學院,山東 青島 266199;2.青島海洋科學與技術國家實驗室,山東 青島 266237)
0 引言
水下滑翔機是20世紀90年代發展起來的一種新型水下無人潛器,它是在自沉浮浮標基礎上發展而成的,是一種介于浮標和自主水下航行器之間的剖面測量設備[1]。水下滑翔機作為一種新型無動力無人海洋移動監測平臺,具有在位時間長、航程距離遠、噪聲水平低、隱蔽性能高、成本低、易操作等優點,已經廣泛應用于海洋環境監測領域,其平臺技術相對成熟,其工作原理是:通過改變自身浮力變化驅動,借助兩側水平翼產生水動力,改變水下滑翔機重心位置以調整運動姿態,實現前進滑翔運動[2-7]。近年來,隨著平臺、傳感器技術及水聲信號處理的發展,水下滑翔機在水中目標探測方面的應用得到了快速發展和廣泛應用[8-13]。
矢量水聽器可以同步共點輸出聲壓標量和質點振速或質點振動加速度等正交矢量,與聲壓水聽器相比提供了更加全面的聲場信息,大大提高了聲場分析的能力。矢量水聽器即具有與頻率無關的偶極子接收指向性,也具有一定的抗各向同性噪聲能力,利用單矢量水聽器可以實現目標全空間無模糊測向,使得矢量水聽器在水聲探測領域具有獨特優勢[14-17]。
在水下滑翔機平臺上搭載聲學系統,構建新型水下聲學滑翔機,成為當前研究的熱點。本文通過在天津大學Petrel-Ⅱ型水下滑翔機平臺上集成矢量水聽器聲學系統,對聲學系統和滑翔機平臺各工況下自噪聲在消聲水池進行測量,分析聲學系統自噪聲水平和平臺主要噪聲源,以期根據試驗結果指導平臺減震降噪處理,并對聲學系統工作模式進行優化。為檢驗水下聲學滑翔機的目標探測性能,于2018年5月,在南海海區組織了水下聲學滑翔機協同探測試驗。試驗結果表明:水下聲學滑翔機可作為一種潛在的優勢水下無人移動探測平臺,用于對水中目標進行長期隱蔽探測。
1 水下滑翔機聲學探測系統
為提升矢量水聽器對水下弱目標信號的檢測能力,對矢量水聽器各模塊進行了電磁屏蔽處理,通過對加速度傳感器和壓電陶瓷圓管進行單獨屏蔽,可實現整體電磁兼容性,從而降低矢量水聽器自噪聲[18-20]。
為完成矢量水聽器接收水聲信號的采集、存儲、處理和分析,本文研發了一種低功耗和小尺寸的四通道水聲信號處理機。水聲信號處理機整體功耗約6 W,總容量為64 GB,由電源板、模擬板、數字板以及上位機組成,其中還包括控制、船舶自動識別系統、姿態和調試4個RS232接口以及1個網口用以進行信息傳輸,網口主要用于水聲信號處理機和上位機之間的連接,上位機連接信號處理機后便可對其進行授時、格式化、數據下載和程序更新等操作[8-9]。
圖1給出了矢量水聽器和水聲信號處理機整個聲學系統4個通道在消聲水池測量得到的自噪聲結果,為了便于比較,同時給出了Knudsen曲線在海況0級(SS0)和6級(SS6)條件下的海洋環境噪聲譜級。由圖1可以看出:1)矢量水聽器聲壓通道自噪聲譜級在整個頻率范圍內小于0級海況海洋環境噪聲;2)矢量水聽器3個矢量通道自噪聲譜級隨頻率的降低而增大,這是因為矢量水聽器矢量通道等效聲壓靈敏度隨頻率的降低而減小,頻率越低、矢量通道自噪聲譜級越大,從而使得矢量通道自噪聲在低頻段達到最大。
2 水下滑翔機平臺自噪聲測試
Petrel-Ⅱ型水下滑翔機主要用于海洋環境觀測任務,其對平臺自噪聲考慮較少,而聲學系統工作時對水下滑翔機的平臺自噪聲非常敏感,系統排油、姿態調節及螺旋槳轉動等均會產生較大的平臺自噪聲,并嚴重干擾矢量水聽器信號接收。為了更好地開展聲矢量水聽器在水下滑翔機平臺上的應用工作,有必要對滑翔機平臺各工況下的輻射噪聲進行測量,得到水下滑翔機的自噪聲源分布及其特性,這對滑翔機減振降噪措施的實施和性能改進具有較好的指導意義[10-12]。
一般地,水下滑翔機的平臺噪聲主要分為機械噪聲、螺旋槳噪聲和水動力噪聲,水下滑翔機在剖面滑翔工作模式下最大水平滑翔速度約為1 kn,且矢量水聽器外面有聚氨酯導流罩保護,可將水流噪聲的影響控制到很小,因此機械噪聲和螺旋槳噪聲是水下滑翔機的主要噪聲源。水下聲學滑翔機在水下進行預警探測任務時,主要采用剖面滑翔工作模式,只有發現可疑目標緊急上浮報警以及遇到其他突發狀況時才會啟動螺旋槳,因此水下聲學滑翔機在進行水下目標探測時可忽略螺旋槳噪聲的貢獻。機械噪聲是水下滑翔機平臺噪聲的主要噪聲源,在整個滑翔機剖面滑翔工作階段,姿態調節裝置和浮力調節裝置為主要機械噪聲源,其中姿態調節裝置包括俯仰調節和橫滾調節兩部分。滑翔機俯仰調節是通過沿平臺中軸線前后移動電池包進行俯仰角調節,實現平臺上浮和下潛運動,橫滾調節機構則通過繞平臺中軸線轉動電池包進行橫滾角調節,當滑翔機航向偏離計劃航向時來完成航向控制。水下滑翔機下潛至最大剖面工作深度時,油泵電機上電開始工作,并將液油排到油囊來增加平臺的浮力,使滑翔機完成由下潛到上浮的過渡控制。
為進一步對Petrel-Ⅱ型水下滑翔機平臺自噪聲的基本特性進行深入分析,定量描述平臺各噪聲源的貢獻,在國家深海基地管理中心消聲水池進行水下滑翔機各工況條件下的自噪聲測試,消聲水池的尺寸:長×寬×深為16 m×8 m×8 m,自噪聲采集系統包括矢量水聽器和水聲信號處理機,矢量水聽器負責接收平臺噪聲信號,水聲信號處理機負責信號的采集、存儲、處理和分析。圖2給出了水下滑翔機電池滑動、油泵啟動、電池轉動和螺旋槳1 kn轉動4種工況條件下噪聲譜級與消聲水池背景噪聲級的比對結果,圖2中的處理結果是由安裝在滑翔機頭部的矢量水聽器接收各工況下噪聲數據并采用1/3倍頻程譜計算方法處理得到的。由圖2可以看出,滑翔機4種工況條件下產生的噪聲譜級均明顯大于消聲水池背景噪聲,且在800~1 000 Hz頻段范圍內,由滑翔機油泵啟動產生的輻射噪聲存在一個很高的平臺峰,該平臺峰對應的噪聲譜級在4種測試工況中最大。
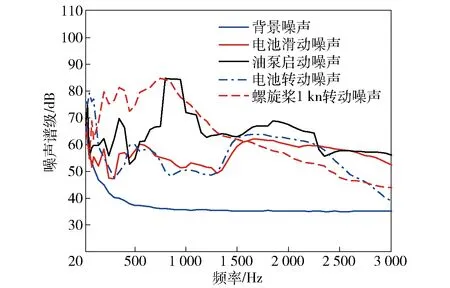
圖2 水下滑翔機平臺噪聲譜級Fig.2 Noise levels of underwater glider platform
由圖2可知,水下滑翔機平臺上集成的矢量水聽器在滑翔機電池滑動、油泵啟動、電池轉動和螺旋槳轉動工況下均會受到嚴重的近場干擾,特別是在油泵啟動和螺旋槳轉動兩種工況下,弱目標信號將被滑翔機平臺產生的自噪聲所掩蓋而無法正常進行目標探測,因此水下聲學滑翔機在水下進行探測任務時俯仰調節機構、油泵電機和螺旋槳要停止工作。由于滑翔機需要實時調整航向,橫滾調節機構無法停止工作,后續需要對滑翔機橫滾調節機構進行減振降噪處理來降低平臺自噪聲水平。在第3節滑翔機第4剖面試驗過程中,設置滑翔機平臺橫滾電機不工作,即在滑翔機剖面滑翔過程中不對平臺航向進行調節,來消除橫滾調節機構對聲學系統的噪聲影響。
3 南海試驗數據分析
3.1 試驗說明
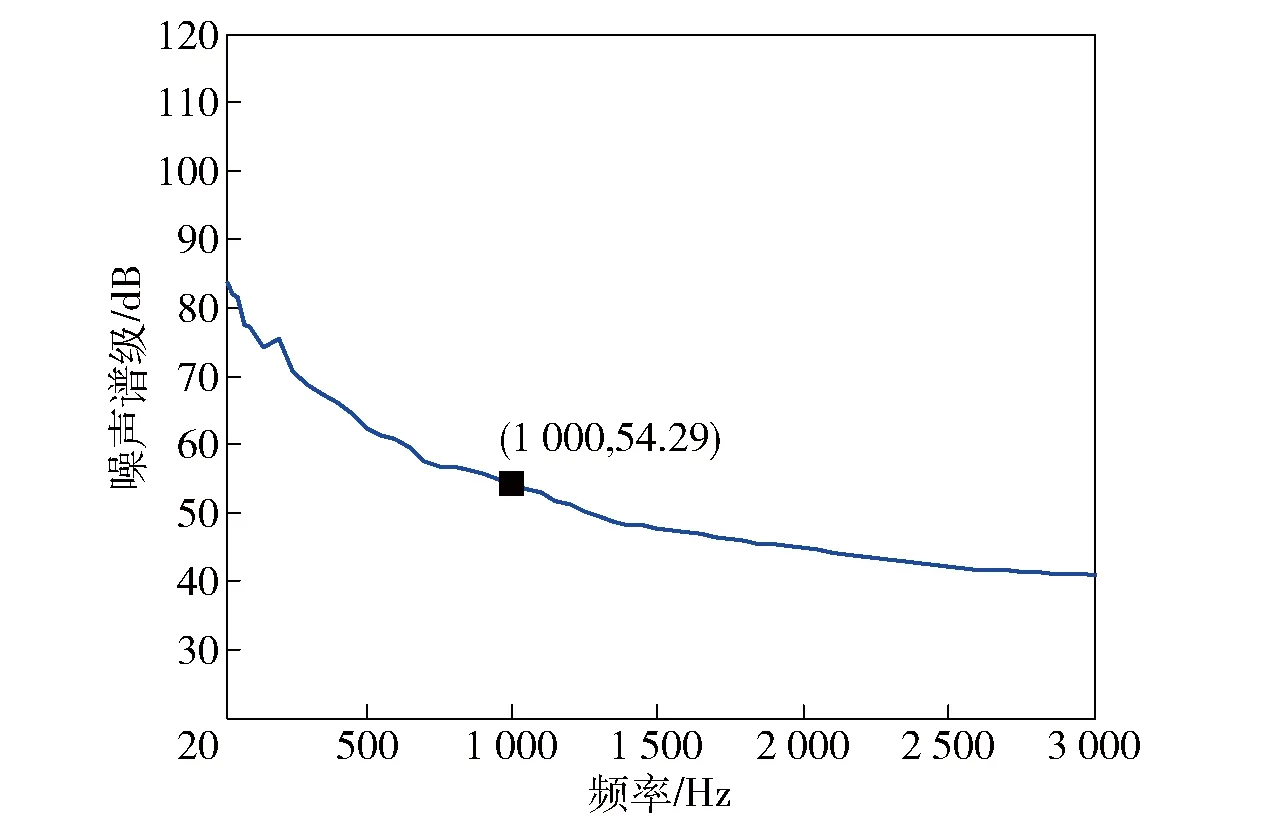
圖3 試驗期間海洋環境噪聲譜級Fig.3 Ambient noise level during the experiment
2018年5月,在南海某1 500 m海深區域開展了水下聲學滑翔機位置協同探測試驗,滑翔機采用剖面滑翔方式工作,設置最大下潛深度600 m.試驗海區海底為平坦的泥沙底質,試驗期間海況較好約為2級,海洋環境噪聲譜級約為54 dB@1 kHz,如圖3所示。圖4給出了用溫鹽深剖面儀測量得到的聲速剖面。

圖4 試驗期間聲速剖面Fig.4 Sound velocity profile during the experiment
3.2 滑翔機橫滾電機工作
圖5給出了水下滑翔機剖面滑翔工作期間平臺深度隨時間的變化情況。由圖5可以看出,滑翔機平臺在9:00~21:00時間段內工作4個剖面,其中,第1個工作剖面設置水下滑翔機發現目標后上浮,第2、3、4個工作剖面設置水下滑翔機發現目標后不上浮,全程采集聲學信號,水下滑翔機剖面滑翔工作期間平臺最大下潛深度約560 m,一個剖面時長約3 h,其中滑翔機排油調整姿態和浮力階段水下滑翔機聲學系統斷電停機約10 min.
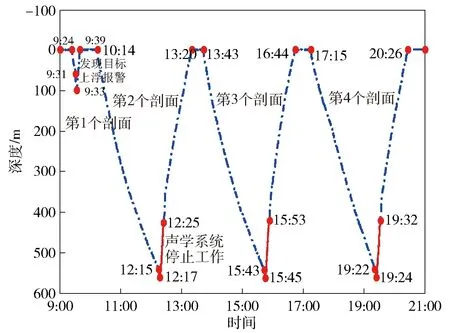
圖5 滑翔機平臺深度隨時間變化Fig.5 Glider platform depth change over time
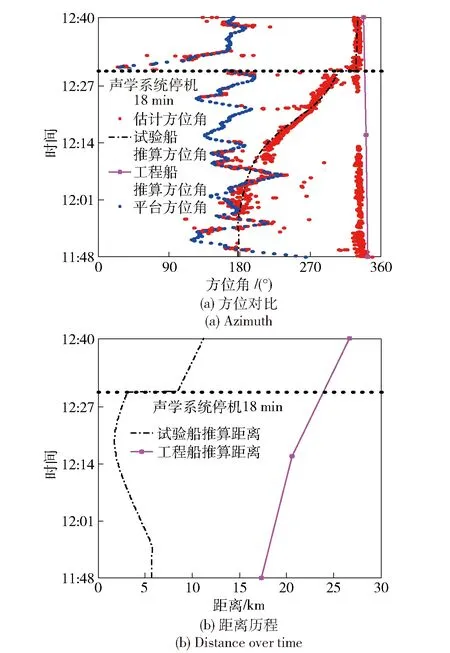
圖6 噪聲估計方位與目標推算方位對比及距離歷程Fig.6 Comparison of estimated noise orientation and calculated target azimuth and distance over time
圖6給出了水下聲學滑翔機在11:48~12:40時間段內接收到的附近水面航船(試驗船和工程船)噪聲信號估計方位與推算方位對比圖,以及滑翔機平臺和水面航船在此時間段內的距離歷程圖,其中12:15~12:25時間段內滑翔機排油調整姿態和浮力階段聲學系統斷電停止工作。圖7為航船噪聲估計方位歷程偽彩圖。圖8給出了11:48~12:40時間段內滑翔機平臺的姿態角隨時間變化情況,其中航向角0°為滑翔機平臺頭部指向正北方向,順時針轉1圈航向角從0°~360°;橫滾角0°為滑翔機水平放置,從滑翔機尾部朝頭部方向看,橫滾角向左滾轉到180°、向右滾轉到-180°;俯仰角0°也為滑翔機水平放置,滑翔機頭部向下俯仰角到90°,滑翔機頭部向上俯仰角到-90°.由圖8可以看出:航向角和橫滾角在整個11:48~12:40時間段內不斷進行調整,而姿態俯仰角只在滑翔機平臺最大工作深度處發生變化,其中航向角輸出對應滑翔機平臺與矢量水聽器連線相對于正北方向的方位;姿態俯仰角輸出對應滑翔機平臺的俯仰角變化,俯仰角為正值表示滑翔機平臺頭部朝下做剖面滑翔,俯仰角為負值表示滑翔機平臺頭部朝上做剖面滑翔;姿態橫滾角輸出對應滑翔機平臺橫滾變化情況,當滑翔機航向角偏離計劃航向時,滑翔機橫滾調節機構就會工作(電磁抱閘調節橫滾角)來調整滑翔機平臺航向角,這期間會產生較大的平臺噪聲干擾。圖9所示為11:48~12:40時間段內試驗船、工程船與滑翔機平臺相對位置態勢圖。圖10給出了滑翔機橫滾調節機構工作時矢量水聽器聲壓通道接收到的時域信號波形。從圖10中可以明顯看出由電磁抱閘而產生的噪聲脈沖干擾。
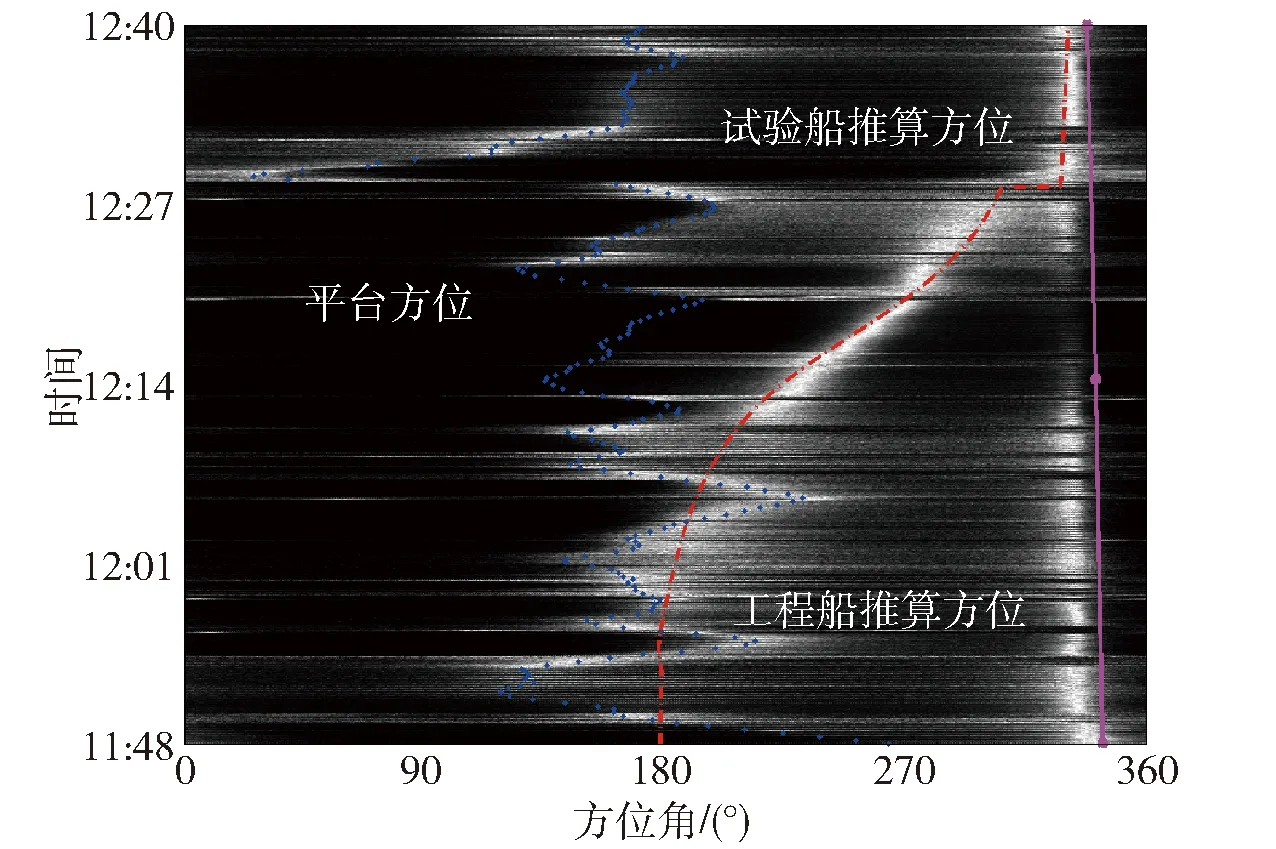
圖7 航船噪聲估計方位歷程偽彩圖Fig.7 Pseudo-color image of estimated ship noise azimuth
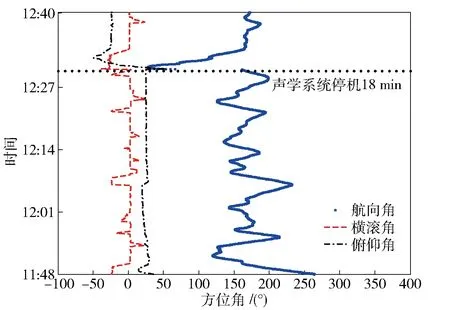
圖8 水下滑翔機平臺姿態角隨時間變化Fig.8 Change of underwear glider attitude angle with time

圖9 滑翔機與試驗船和工程船的相對運動態勢圖Fig.9 Relative motion among glider platform,trial ship and engineering ship

圖10 抱閘干擾時段時域信號Fig.10 Original signal during brake interference
從圖6和圖7中可以看出,11:48~12:40時間段內,滑翔機聲學系統除了接收試驗船和工程船噪聲信號外,還受到了滑翔機平臺間歇性抱閘噪聲干擾影響,嚴重影響了滑翔機聲學系統的探測性能。
3.3 滑翔機橫滾電機不工作
在航向調節過程中,由于水下滑翔機橫滾調節機構工作會產生較大的間歇性抱閘噪聲,聲學系統受到嚴重平臺噪聲干擾影響,在滑翔機第4剖面試驗過程中設置滑翔機平臺橫滾電機不工作,在剖面滑翔過程中不對航向進行調節。
圖11給出了水下聲學滑翔機在17:20~19:10時間段內聲學系統計算輸出的航船噪聲估計方位歷程與推算方位歷程對比圖,以及試驗船和工程船相對于滑翔機平臺距離歷程圖。圖12給出了航船噪聲估計方位歷程偽彩圖。通過查看船載船舶自動識別系統在17:20~19:10時間段接收到的水面航船信號,發現滑翔機平臺附近只有工程船和試驗船兩艘航船,工程船在17:20~18:50時間段內航速6.2 kn航向63°,在18:50~19:10時間段內航速6.2 kn航向10°;試驗船在17:20~17:46時間段內停止,17:46~19:10時間段內航速10 kn航向340°.圖13給出了17:20~19:10時間段內試驗船、工程船與滑翔機平臺相對位置態勢圖。
由圖11和圖12可以看出,在17:20~17:50時間段內,水下滑翔機主要接收工程船噪聲信號,計算方位為工程船目標方位,此時間段工程船距離滑翔機平臺最遠達30 km.在17:50~19:05時間段內(試驗船航速10 kn航行),水下滑翔機主要接收試驗船航船噪聲信號,計算方位為試驗船目標方位,但受工程船噪聲干擾,以及滑翔機平臺推算位置不精確,試驗船目標計算方位與推算方位間存在一定偏差,此時間段內試驗船距離滑翔機平臺最遠達14 km.在19:05~19:10時間段內,由于航速6.2 kn的工程船(距離43.4 km)噪聲信號強度大于航速10 kn的試驗船(距離16.3 km)噪聲信號,水下聲學滑翔機計算方位為工程船目標,但此時工程船與滑翔機平臺距離較遠,聲學系統接收航船目標信噪比較低,因此目標計算方位與推算方位間存在較大偏差。由以上分析可知,在無滑翔機平臺間歇性抱閘噪聲干擾影響情況下,水下滑翔機對航速6.2 kn的工程船目標最遠探測距離可達30 km,而對航速10 kn的試驗船目標最遠探測距離大于14 km.

圖11 噪聲估計方位與目標推算方位對比及距離歷程Fig.11 Comparison of estimated noise orientation and calculated target azimuth and distance over time
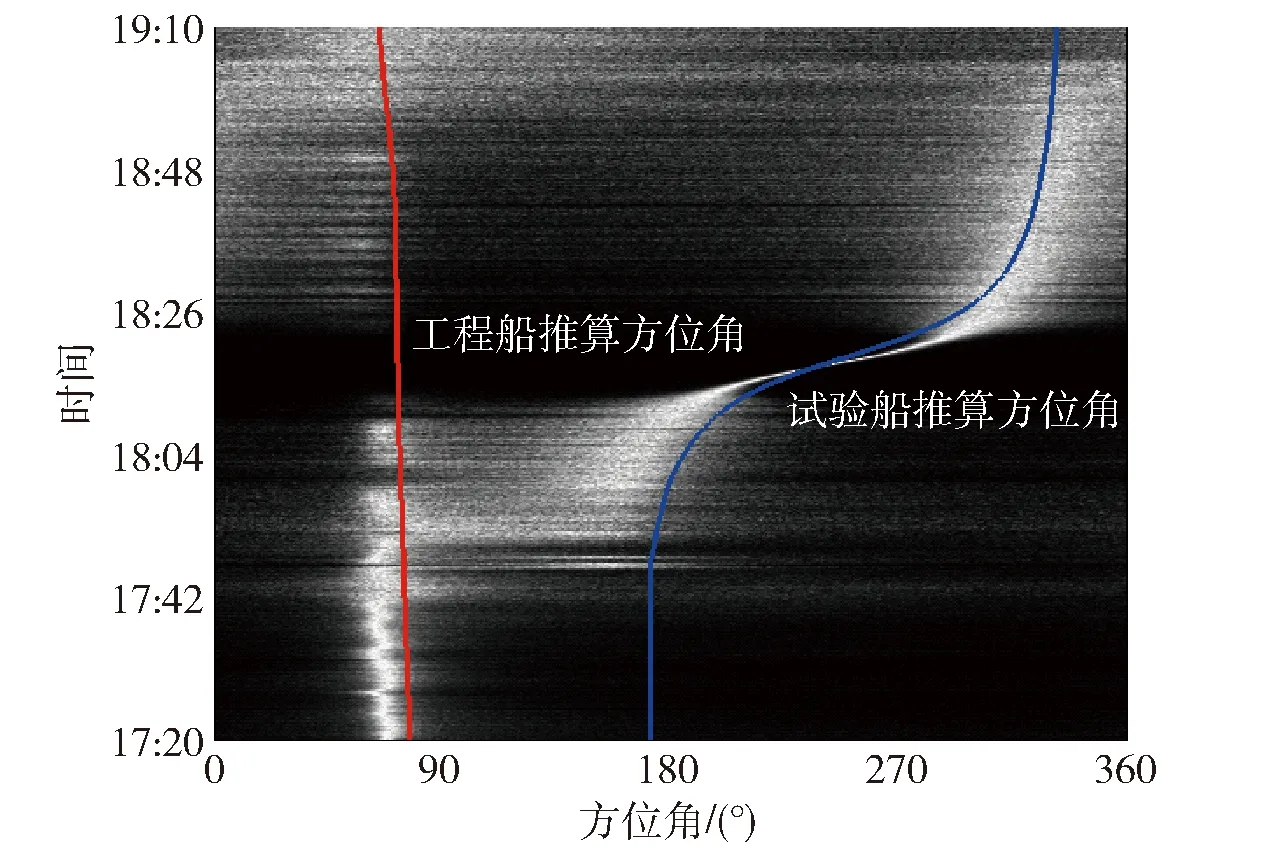
圖12 航船噪聲估計方位歷程偽彩圖Fig.12 The color map of ship noise estimation azimuth

圖13 滑翔機平臺與試驗船和工程船的相對運動態勢圖Fig.13 Relative motion among glider platform,trial ship and engineering ship
4 結論
本文將單個矢量水聽器與水下滑翔機平臺相結合,構建了一種具有目標探測能力的新型水下滑翔機,并定量測試分析了滑翔機聲學系統自噪聲水平和平臺主要噪聲源。2018年5月南海試驗結果表明:1)水下滑翔機航向調節機構在進行橫滾角調節完成平臺航向控制過程中,聲學系統會受到嚴重的間歇性抱閘噪聲干擾影響;2)在無滑翔機平臺噪聲干擾影響情況下,水下聲學滑翔機對航速10 kn的配合水面航船目標最遠探測距離大于14 km.本文工作對推動我國水下無人平臺用于目標探測應用具有顯著意義。
