基于改進(jìn)LuGre摩擦模型的雙旋彈丸固定舵翼滾轉(zhuǎn)位置魯棒自適應(yīng)控制算法
2020-01-08 00:35:02殷婷婷賈方秀于紀(jì)言王曉鳴
兵工學(xué)報(bào) 2019年12期
關(guān)鍵詞:模型設(shè)計(jì)
殷婷婷,賈方秀,于紀(jì)言,王曉鳴
(南京理工大學(xué) 智能彈藥技術(shù)國防重點(diǎn)學(xué)科實(shí)驗(yàn)室,江蘇 南京 210094)
0 引言
固定鴨舵式雙旋彈道修正彈具有性價(jià)比高、結(jié)構(gòu)簡單及平臺(tái)適應(yīng)性強(qiáng)等優(yōu)點(diǎn),已成為當(dāng)前軍事裝備領(lǐng)域的研究熱點(diǎn)[1]。當(dāng)舵翼在隔轉(zhuǎn)摩擦力矩、控制力矩和差動(dòng)舵提供的反向氣動(dòng)力矩作用下到達(dá)指定位置時(shí),同向舵為彈丸提供側(cè)向操縱力和力矩,實(shí)現(xiàn)二維彈道修正,因此舵翼滾轉(zhuǎn)位置控制是實(shí)現(xiàn)彈道修正的重要研究方向[2-3]。雙旋彈道修正彈具有非線性時(shí)變特性,因此基于該平臺(tái)的舵翼滾轉(zhuǎn)位置控制系統(tǒng)也是一個(gè)非線性系統(tǒng),主要包含參數(shù)不確定性(如隨溫度及磨損變化的摩擦特性參數(shù)、電氣增益等)和不確定性非線性(如橫風(fēng)等未建模外干擾、非線性摩擦等),這些模型不確定性成為限制控制性能的重要因素[4]。
為了提高非線性時(shí)變控制系統(tǒng)的跟蹤性能,許多學(xué)者提出了不同的解決方案。為了降低系統(tǒng)參數(shù)不確定性的影響,自適應(yīng)控制器已被廣泛應(yīng)用,但這些控制器無法處理不確定非線性[5]。然而,橫風(fēng)和非線性摩擦等不確定非線性是雙旋彈丸舵翼滾轉(zhuǎn)位置控制中的主要障礙,Alyaqout等[6]提出以魯棒控制器消除上述不確定非線性的影響,但忽略了參數(shù)不確定性的影響。為了同時(shí)處理參數(shù)不確定性和不確定非線性,Yao等[7]提出了一種適用于非線性系統(tǒng)的自適應(yīng)魯棒控制策略,但該方法始終存在控制誤差,容易造成彈道修正偏差;Chang[8]提出了一種自適應(yīng)滑模控制方法,控制誤差趨近于0,但由于存在不連續(xù)函數(shù),容易造成系統(tǒng)抖振;Patre等[9]提出一種基于誤差符號(hào)的積分魯棒與自適應(yīng)相結(jié)合的控制方法,保證了控制精度和控制輸入的連續(xù)性,但該方法無法處理舵翼滾轉(zhuǎn)系統(tǒng)中的時(shí)變外部擾動(dòng)等不匹配誤差。舵翼滾轉(zhuǎn)系統(tǒng)固有的非線性特性以及各種時(shí)變不確定性,迫切需要設(shè)計(jì)更先進(jìn)可靠的非線性控制策略。
雙旋彈丸舵翼與彈體之間隔轉(zhuǎn)機(jī)構(gòu)的非線性時(shí)變摩擦特性也是影響控制性能的重要因素。前期試驗(yàn)結(jié)果證明,隔轉(zhuǎn)機(jī)構(gòu)摩擦阻尼與鴨舵軸向壓力和相對(duì)滾轉(zhuǎn)速率有關(guān)[10]。為了同時(shí)考慮摩擦中的靜摩擦、庫侖效應(yīng)和動(dòng)態(tài)轉(zhuǎn)速效應(yīng)[11-12],LuGre摩擦模型得到了廣泛應(yīng)用[13];然而LuGre模型中的符號(hào)項(xiàng)不連續(xù),不利于控制器設(shè)計(jì)。Yao等[14]提出以雙曲正切函數(shù)近似不連續(xù)的符號(hào)函數(shù),保證了摩擦模型的連續(xù)性。建立雙旋通道的連續(xù)可微LuGre摩擦模型,是實(shí)現(xiàn)舵翼滾轉(zhuǎn)位置控制器設(shè)計(jì)和分析的重要環(huán)節(jié)。
基于以上分析,本文針對(duì)舵翼滾轉(zhuǎn)位置控制系統(tǒng),建立包含連續(xù)可微摩擦模型的系統(tǒng)數(shù)學(xué)模型。基于Lyapunov分析法設(shè)計(jì)了一種將改進(jìn)的連續(xù)LuGre摩擦模型與魯棒自適應(yīng)控制相結(jié)合的控制策略。該控制方法在在線自適應(yīng)估計(jì)系統(tǒng)參數(shù)、摩擦狀態(tài)及外干擾基礎(chǔ)上引入擾動(dòng)補(bǔ)償反饋項(xiàng),以盡可能降低系統(tǒng)對(duì)參數(shù)不確定性以及時(shí)變擾動(dòng)的敏感度,并通過仿真驗(yàn)證了控制器的有效性。
1 舵翼滾轉(zhuǎn)位置控制系統(tǒng)描述及數(shù)學(xué)模型
舵翼滾轉(zhuǎn)位置控制系統(tǒng)以基于永磁同步發(fā)電機(jī)(PMSG)的雙旋電磁執(zhí)行機(jī)構(gòu)為執(zhí)行器,輸出舵翼滾轉(zhuǎn)控制所需的電磁控制力矩。舵翼在電磁控制力矩Mc、氣動(dòng)力矩Ma和隔轉(zhuǎn)摩擦力矩Md的共同作用下到達(dá)指令位置,如圖1所示。圖1中:fd為系統(tǒng)其他未建模干擾,如模型誤差、外部橫風(fēng)氣流擾動(dòng)和未建模動(dòng)態(tài)等;u為系統(tǒng)控制輸入。

圖1 雙旋彈丸舵翼滾轉(zhuǎn)位置控制系統(tǒng)原理圖Fig.1 Schematic diagram of rudder roll control system in dual-spin projectile
在舵翼滾轉(zhuǎn)位置閉環(huán)控制系統(tǒng)中,系統(tǒng)采用高頻響應(yīng)的電磁執(zhí)行機(jī)構(gòu),考慮到電氣響應(yīng)速度遠(yuǎn)遠(yuǎn)高于機(jī)械部分,本文建模時(shí)忽略電流環(huán)動(dòng)態(tài),將電流環(huán)近似簡化為比例環(huán)節(jié)[15],根據(jù)牛頓第二定律,系統(tǒng)動(dòng)力學(xué)模型為
(1)
式中:J為舵翼轉(zhuǎn)動(dòng)慣量;θf為舵翼滾轉(zhuǎn)位置;Kn為最大電磁控制力矩相對(duì)于轉(zhuǎn)速n的系數(shù);θp為彈體滾轉(zhuǎn)位置;t為彈丸出炮口的時(shí)間。
(1)式中的氣動(dòng)力矩Ma由舵翼的舵面尺寸、斜置角和滾轉(zhuǎn)狀態(tài)共同決定[16],如(2)式所示:
(2)

為同時(shí)兼顧摩擦特征和控制器設(shè)計(jì)要求,基于雙旋彈丸隔轉(zhuǎn)機(jī)構(gòu)的滾轉(zhuǎn)特征,以雙旋隔轉(zhuǎn)機(jī)構(gòu)滾轉(zhuǎn)模型代替原模型中的滾轉(zhuǎn)角速度變量,連續(xù)可微LuGre摩擦模型可改寫為

(3)
式中:ωr為雙旋隔轉(zhuǎn)機(jī)構(gòu)滾轉(zhuǎn)角速度;σ0、σ1、σ2為表征摩擦特征的權(quán)重因子;z為模型引入的鬃毛平均變形狀態(tài)量;Fs為靜摩擦力;Fc為庫侖摩擦力,與雙旋彈丸前后級(jí)之間的軸向壓力有關(guān)[16];a1、a2、a3為表征摩擦特性的形狀系數(shù)。
為了在實(shí)驗(yàn)中優(yōu)化離散的控制器,定義正定函數(shù)N(ωr)=ωr/g(ωr),則摩擦模型可改寫為如(4)式所示的形式。函數(shù)N(ωr)的正定性可作為后續(xù)控制器穩(wěn)定性證明的依據(jù),
(4)
(5)
式中:d(t)為未建模擾動(dòng)。

(6)
系統(tǒng)控制器的設(shè)計(jì)目標(biāo)如下:給定系統(tǒng)參考信號(hào)x1d(t),基于所建立的舵翼滾轉(zhuǎn)系統(tǒng)非線性模型,設(shè)計(jì)一個(gè)有界的控制輸入u,使系統(tǒng)在存在摩擦、非線性以及時(shí)變參數(shù)和擾動(dòng)不確定性問題的情況下,系統(tǒng)的輸出x1盡可能快速準(zhǔn)確地跟蹤x1d(t)。為便于控制器設(shè)計(jì),作以下假設(shè):

假設(shè)2定義未知參數(shù)集θ以及不確定非線性項(xiàng)d(t)均有界,即
θ∈{θ:θmin≤θ≤θmax},|d(t)|≤D,
(7)
式中:θmin和θmax已知,θmin=[θ1min,…,θ6min]T,θmax=[θ1max,…,θ6max]T;D為未知常數(shù)。
2 魯棒自適應(yīng)控制器設(shè)計(jì)
2.1 參數(shù)自適應(yīng)設(shè)計(jì)
2.1.1 模型不確定性參數(shù)集自適應(yīng)率設(shè)計(jì)
由于彈藥發(fā)射條件不完全一致,修正組件也存在個(gè)體差異,基于地面和靶場試驗(yàn)的模型辨識(shí)參數(shù)與實(shí)際值間必然存在偏差,即為控制系統(tǒng)的參數(shù)不確定性。控制器利用實(shí)驗(yàn)得到的模型參數(shù)為初始值,采用在線自適應(yīng)估計(jì)的方法,實(shí)現(xiàn)對(duì)每發(fā)實(shí)驗(yàn)彈丸參數(shù)的準(zhǔn)確估計(jì)。將對(duì)參數(shù)集θ的估計(jì)記作,將估計(jì)誤差記作即定義如下參數(shù)自適應(yīng)不連續(xù)投影映射函數(shù)[17]:
(8)
式中:τi為參數(shù)θi自適應(yīng)函數(shù),i=1,…,6.
采用以下參數(shù)自適應(yīng)律:
(9)
式中:Γ為正定對(duì)角自適應(yīng)矩陣;τ為參數(shù)集θ的自適應(yīng)函數(shù),具體形式將在控制器設(shè)計(jì)中給出。不連續(xù)的參數(shù)映射具有如下特性[17]:
∈{:θmin≤≤θmax},
(10)
(11)
2.1.2 時(shí)變非線性摩擦狀態(tài)量自適應(yīng)率設(shè)計(jì)
摩擦力矩與雙旋轉(zhuǎn)速和軸向風(fēng)阻力相關(guān),由于氣流擾動(dòng),軸向風(fēng)阻力具有不可預(yù)測性。除此之外,摩擦力矩受軸承的各向異性、裝配影響嚴(yán)重。因此,摩擦是系統(tǒng)中不確定性非線性問題之一。在LuGre摩擦模型中,狀態(tài)量z為不可測的非線性變量。該狀態(tài)量與狀態(tài)空間方程中的兩項(xiàng)有關(guān),需要對(duì)兩項(xiàng)中的z值分別進(jìn)行自適應(yīng)估計(jì),自適應(yīng)律表示[18]為
(12)
(13)
z的上下界可以根據(jù)LuGre摩擦模型推導(dǎo)得出,即zmax=Fs,zmin=-Fs.1和2滿足如下性質(zhì)[18]:
zmin≤j≤zmax,
(14)
(15)

2.1.3 非線性時(shí)變擾動(dòng)上界自適應(yīng)率設(shè)計(jì)
彈丸飛行過程中,氣流不穩(wěn)定造成的舵翼滾轉(zhuǎn)位置抖動(dòng)和未建模的電磁執(zhí)行機(jī)構(gòu)電氣動(dòng)態(tài)特性等均為系統(tǒng)擾動(dòng)因素。由于擾動(dòng)上界是未知狀態(tài),需要對(duì)擾動(dòng)上界進(jìn)行估計(jì),自適應(yīng)律可以表示[19]為
(16)
(17)
式中:D的上下界可根據(jù)前期試驗(yàn)數(shù)據(jù)推導(dǎo)得出;滿足如下性質(zhì)[19]:
Dmin≤≤Dmax,
(18)
(19)

2.2 基于改進(jìn)摩擦模型的魯棒自適應(yīng)控制器設(shè)計(jì)
定義舵翼滾轉(zhuǎn)控制系統(tǒng)位置跟蹤誤差e1、輔助誤差量e2以及正定反饋增益k1分別為

(20)
傳遞函數(shù)H(s)=e1(s)/e2(s)=1/(s+k1)是穩(wěn)定的,即e2與e1同步趨近于0,s為復(fù)變量。基于e1與e2的同步性,系統(tǒng)控制器的設(shè)計(jì)目標(biāo)可由使得輸出x1盡可能快速準(zhǔn)確地跟蹤x1d(t),轉(zhuǎn)化為使得e2盡可能地小。
結(jié)合(6)式和(20)式,可得
(21)
設(shè)計(jì)魯棒自適應(yīng)控制器u為
(22)
式中:k2為正定反饋增益;ua為具有在線參數(shù)自適應(yīng)功能的可調(diào)整模型補(bǔ)償項(xiàng);us1為線性負(fù)定反饋項(xiàng),用來穩(wěn)定系統(tǒng)的名義模型;us2為用于處理建模不確定性的非線性魯棒反饋項(xiàng)。
將(22)式中的控制參數(shù)u代入動(dòng)態(tài)方程(21)式,可得
(23)
式中:φ[f1ua,f2,f3x2,-1,N(x3)2,-x3]T;設(shè)計(jì)魯棒項(xiàng)
(24)

在呈現(xiàn)所設(shè)計(jì)控制器的主要性能之前,先給出本文中將要用到的控制器參數(shù)的數(shù)學(xué)特性。


2.3 控制器的穩(wěn)定性證明
在給出控制器的穩(wěn)定性證明之前,先確定參數(shù)自適應(yīng)律中的自適應(yīng)函數(shù)τ、η1、η2和ψ如下:
τ=φe2,
η1=x3-N(x3)1-γ1e2,
η2=x3-N(x3)2-γ2N(x3)e2,
ψ=γ3e2,
(25)
式中:γ1、γ2、γ3分別為正定的自適應(yīng)學(xué)習(xí)增益。
選取如下Lyapunov函數(shù):
(26)
求(26)式函數(shù)V對(duì)時(shí)間微分,并結(jié)合(20)式、(22)式和(24)式,可得
(27)
由θ1≥θ1min、|d(t)|≤D和投影函數(shù)特性,可得

(28)
根據(jù)引理2,可得
(29)
由引理3,可得

(30)

結(jié)合自適應(yīng)函數(shù)τ的特性及θ的投影特性,可得
(31)
根據(jù)LuGre摩擦模型中z的動(dòng)態(tài)特性,可得
(32)
結(jié)合自適應(yīng)函數(shù)η1和η2及z的投影特性可知,
(33)
整理(33)式可得
(34)

將(34)式對(duì)時(shí)間進(jìn)行積分,結(jié)合引理1,可得
(35)

3 仿真實(shí)驗(yàn)結(jié)果及分析
為了驗(yàn)證控制器的有效性,結(jié)合前期實(shí)驗(yàn)數(shù)據(jù)建立舵翼滾轉(zhuǎn)位置控制系統(tǒng)仿真模型。模型以155 mm炮射高旋彈丸外彈道特性為輸入,給定階躍形式的位置指令x1d(t)=1,t>20,對(duì)舵翼滾轉(zhuǎn)位置控制系統(tǒng)進(jìn)行仿真。為了評(píng)估控制器的穩(wěn)態(tài)跟蹤性能,以前期靶場試驗(yàn)數(shù)據(jù)為參考,外部干擾和反饋測量噪聲分別選取幅值為0.03和5×10-4的隨機(jī)噪聲。分別選取以下5種控制器進(jìn)行雙旋彈丸固定鴨舵滾轉(zhuǎn)位置控制的對(duì)比仿真。
1)本文所提基于改進(jìn)LuGre的魯棒自適應(yīng)摩擦補(bǔ)償控制器(RALuGre)。舵翼滾轉(zhuǎn)系統(tǒng)參數(shù)如下:J=2.757×10-4kg·m2,S=0.018 9 m2,d=0.155 0 m,H(0)=0,δ=4°.控制器增益k1=200,k2=15,選定與系統(tǒng)仿真模型存在偏差的參數(shù)作為參數(shù)集自適應(yīng)的初始值:(0)=[0.3,-1×104,4×10-5,1,0,8×10-5],1(0)=2(0)=0,(0)=0.01;界限:θmax=[1,-1×102,4×10-4,10,10,1×10-4]T,zmax=-zmin=0.1,θmin=[0.1,-1×105,4×10-6,0,-10,1×10-5]T,Dmax=0.1,Dmin=0;對(duì)角自適應(yīng)律矩陣選為Γ=diag{0.01,1,1,1×104,1×102,10};γ1=γ2=1×10-5,γ3=100.
2)基于摩擦補(bǔ)償?shù)聂敯艨刂破?RLuGre)。在RALuGre控制器的基礎(chǔ)上去除參數(shù)自適應(yīng),對(duì)比驗(yàn)證參數(shù)自適應(yīng)對(duì)于非線性時(shí)變系統(tǒng)的重要性。
3)基于摩擦補(bǔ)償?shù)淖赃m應(yīng)控制器(ALuGre)。在RALuGre控制器的基礎(chǔ)上去除基于擾動(dòng)估計(jì)的非線性魯棒補(bǔ)償項(xiàng),對(duì)比驗(yàn)證魯棒補(bǔ)償項(xiàng)的重要性。
4)魯棒自適應(yīng)控制器(RAC)。RAC控制器參數(shù)值與RALuGre參數(shù)值相同,對(duì)比驗(yàn)證連續(xù)可微摩擦模型的可靠性以及摩擦補(bǔ)償?shù)谋匾浴?/p>
5)基于速度前饋補(bǔ)償?shù)谋壤? 積分- 微分(PID)控制器(PIDVF)。將舵翼滾轉(zhuǎn)位置誤差項(xiàng)轉(zhuǎn)化為速度誤差,并基于速度閉環(huán)進(jìn)行前饋補(bǔ)償。
為了評(píng)估控制算法的性能,將控制響應(yīng)時(shí)間Tc、最大跟蹤誤差M、平均跟蹤誤差μ以及跟蹤誤差標(biāo)準(zhǔn)差σ作為性能指標(biāo),結(jié)果如圖2、圖3和表1所示。
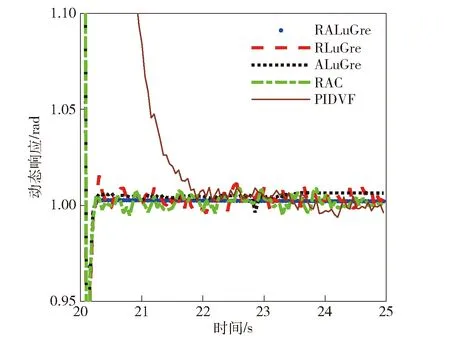
圖2 舵翼滾轉(zhuǎn)位置動(dòng)態(tài)響應(yīng)曲線Fig.2 Response curves of rudder roll position control
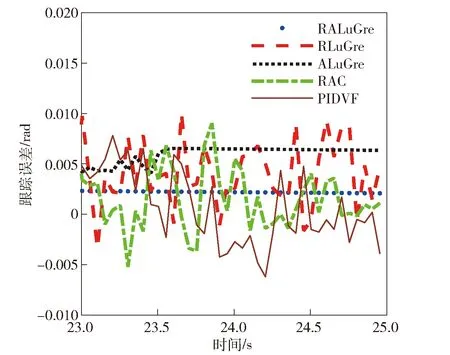
圖3 舵翼滾轉(zhuǎn)位置控制跟蹤誤差曲線Fig.3 Error curves of rudder roll position control
從圖2和圖3中的曲線以及表1中的統(tǒng)計(jì)數(shù)據(jù)可以看出,經(jīng)典PIDVF對(duì)于高度非線性時(shí)變擾動(dòng)系統(tǒng)控制響應(yīng)較為緩慢且跳動(dòng)較大,而RALuGre、RLuGre、ALuGre和RAC均優(yōu)于PIDVF.RALuGre的跟蹤誤差小于RAC,證明了基于改進(jìn)LuGre摩擦模型的參數(shù)估計(jì)和補(bǔ)償方法更精確;RALuGre和RLuGre曲線證明了時(shí)變參數(shù)自適應(yīng)估計(jì)對(duì)于穩(wěn)定控制的必要性;對(duì)比ALuGre和RALuGre可知,在控制器中加入擾動(dòng)補(bǔ)償魯棒性,系統(tǒng)跟蹤誤差可進(jìn)一步減小。
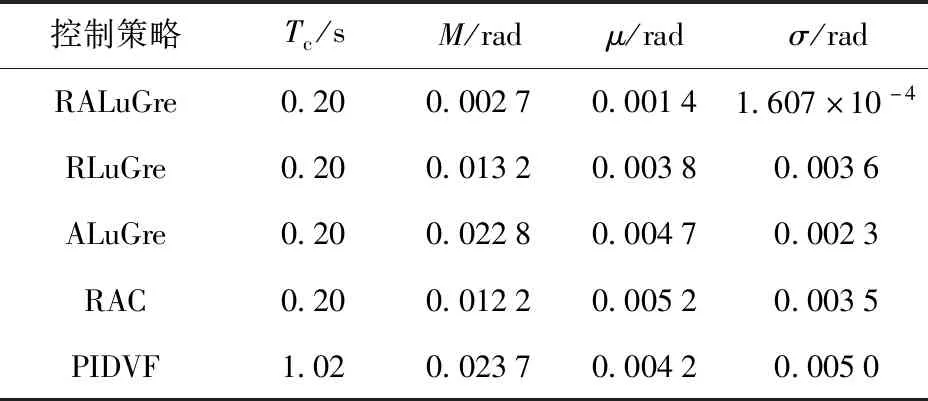
表1 不同控制器的控制性能指標(biāo)參數(shù)Tab.1 Performance indexes of rudder roll position controllers
由5組仿真實(shí)驗(yàn)結(jié)果可知,RALuGre控制器的優(yōu)越性如下:RALuGre控制器采用在線自適應(yīng)方法對(duì)不確定性參數(shù)進(jìn)行估計(jì),同時(shí)結(jié)合LuGre摩擦模型對(duì)摩擦特征量進(jìn)行估計(jì),繼而在對(duì)外部擾動(dòng)上界進(jìn)行估計(jì)的基礎(chǔ)上利用魯棒反饋項(xiàng)進(jìn)行補(bǔ)償。
綜上所述,本文仿真結(jié)果驗(yàn)證了所設(shè)計(jì)基于改進(jìn)LuGre摩擦模型魯棒自適應(yīng)控制器的有效性,控制器能夠很快收斂并趨于穩(wěn)定,驗(yàn)證了本文設(shè)計(jì)方法的穩(wěn)定性和可靠性。
4 結(jié)論
本文以基于PMSG為電磁執(zhí)行機(jī)構(gòu)的舵翼滾轉(zhuǎn)位置控制系統(tǒng)為研究對(duì)象,建立了包含改進(jìn)連續(xù)可微LuGre摩擦模型的系統(tǒng)狀態(tài)方程,推導(dǎo)得出了魯棒自適應(yīng)控制器。設(shè)計(jì)自適應(yīng)律估計(jì)不確定性參數(shù)、摩擦特征量以及時(shí)變擾動(dòng)的上界,根據(jù)估計(jì)結(jié)果設(shè)計(jì)魯棒反饋項(xiàng)和模型補(bǔ)償項(xiàng)。最后基于Lyapunov穩(wěn)定性理論證明了系統(tǒng)的全局穩(wěn)定性;通過5種典型控制器的仿真實(shí)驗(yàn)結(jié)果對(duì)比驗(yàn)證了本文所設(shè)計(jì)控制器的有效性和可靠性。得出以下主要結(jié)論:
1)基于魯棒自適應(yīng)控制方法所設(shè)計(jì)的魯棒補(bǔ)償項(xiàng)和模型補(bǔ)償項(xiàng),能夠有效削弱參數(shù)不確定性和包含摩擦和外部擾動(dòng)的不確定性非線性對(duì)系統(tǒng)控制性能的影響。
2)基于改進(jìn)連續(xù)可微LuGre摩擦模型的魯棒自適應(yīng)控制方法實(shí)現(xiàn)了對(duì)非線性摩擦狀態(tài)量的較好估計(jì),對(duì)比實(shí)驗(yàn)結(jié)果表明該方法能夠大幅度降低跟蹤誤差的幅值。
本文旨在為雙旋彈道修正彈固定舵翼滾轉(zhuǎn)位置控制系統(tǒng)提供控制策略和方法,考慮到電磁執(zhí)行機(jī)構(gòu)的動(dòng)態(tài)特征會(huì)對(duì)舵翼位置控制系統(tǒng)高頻動(dòng)態(tài)產(chǎn)生影響,后續(xù)將針對(duì)該影響因素開展更深入的研究。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
流行色(2020年1期)2020-04-28 11:16:38
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
