基于生成式對(duì)抗網(wǎng)絡(luò)的合成孔徑雷達(dá)艦船數(shù)據(jù)增廣在改進(jìn)單次多盒檢測(cè)器中的應(yīng)用
2020-01-08 00:35:26楊龍蘇娟李響
兵工學(xué)報(bào) 2019年12期
關(guān)鍵詞:檢測(cè)
楊龍,蘇娟,李響
(火箭軍工程大學(xué) 核工程學(xué)院,陜西 西安 710025)
0 引言
合成孔徑雷達(dá)(SAR)因其具有全天時(shí)、全天候、多視角、多俯角的數(shù)據(jù)獲取優(yōu)勢(shì),在目標(biāo)檢測(cè)領(lǐng)域,SAR圖像目標(biāo)檢測(cè)技術(shù)已經(jīng)成為當(dāng)前軍用和民用領(lǐng)域研究的熱點(diǎn)。而SAR圖像艦船目標(biāo)檢測(cè)則是軍用領(lǐng)域?qū)D繕?biāo)檢測(cè)的重要分支,通過(guò)對(duì)敵方艦船的精確檢測(cè),可為我方精確制導(dǎo)武器精確打擊目標(biāo)提供有力的支持。
隨著深度學(xué)習(xí)的不斷發(fā)展,基于深度學(xué)習(xí)的目標(biāo)檢測(cè)技術(shù)已經(jīng)成為當(dāng)前計(jì)算機(jī)視覺(jué)領(lǐng)域的主流方向[1],而基于深度學(xué)習(xí)的SAR圖像艦船目標(biāo)檢測(cè)技術(shù)也在一步步走向成熟。其中,文獻(xiàn)[2]提出了一種基于深度卷積神經(jīng)網(wǎng)絡(luò)SAR圖像艦船目標(biāo)檢測(cè)技術(shù),首先構(gòu)造了國(guó)內(nèi)該領(lǐng)域唯一的一個(gè)SAR艦船目標(biāo)檢測(cè)數(shù)據(jù)集(SSDD),在更快速區(qū)域卷積神經(jīng)網(wǎng)絡(luò)(Farster R-CNN)[3]的基礎(chǔ)上,提出了特征聚合、遷移學(xué)習(xí)、損失函數(shù)設(shè)計(jì)和應(yīng)用細(xì)節(jié)的創(chuàng)新,檢測(cè)的平均準(zhǔn)確率達(dá)到75.6%;文獻(xiàn)[4]提出一種基于生成式對(duì)抗網(wǎng)絡(luò)(GAN)[5]和線(xiàn)上難例樣本挖掘的SAR圖像艦船目標(biāo)檢測(cè)技術(shù),在Fast R-CNN[6]的基礎(chǔ)上,使用對(duì)抗網(wǎng)絡(luò)生成難例樣本增強(qiáng)檢測(cè)器適應(yīng)性,同時(shí)使用線(xiàn)上難例挖掘技術(shù)避免了少量的難例樣本在采樣時(shí)被忽略,提高了模型的檢測(cè)精度,在SSDD上平均準(zhǔn)確率達(dá)到70.2%;文獻(xiàn)[7]提出了一種全新的基于上下文區(qū)域的多層融合卷積神經(jīng)網(wǎng)絡(luò),融合了圖像深層語(yǔ)義和淺層次的高分辨率特征,提高了小型艦船檢測(cè)性能,并在Sentinel-1數(shù)據(jù)集上的進(jìn)行了實(shí)驗(yàn)驗(yàn)證。文獻(xiàn)[8]提出一種基于Fast R-CNN的密集連接多尺度神經(jīng)網(wǎng)絡(luò),從上到下將一個(gè)特征映射與每一個(gè)其他特征映射緊密連接起來(lái),用于解決多尺度、多場(chǎng)景SAR艦船檢測(cè)問(wèn)題,在多個(gè)公開(kāi)數(shù)據(jù)集進(jìn)行測(cè)試,也取得了很好的檢測(cè)效果。
基于深度學(xué)習(xí)的SAR圖像艦船目標(biāo)檢測(cè)技術(shù)在艦船檢測(cè)領(lǐng)域已經(jīng)展現(xiàn)出了強(qiáng)大的實(shí)時(shí)檢測(cè)能力,但是數(shù)據(jù)集稀少仍然是限制該領(lǐng)域進(jìn)一步發(fā)展的瓶頸。已有的數(shù)據(jù)集又存在著數(shù)據(jù)集小、目標(biāo)大小不均勻、難以包含各種復(fù)雜條件下的艦船目標(biāo)等眾多缺點(diǎn),因此通過(guò)一定的技術(shù)對(duì)現(xiàn)有SAR圖像數(shù)據(jù)集進(jìn)行擴(kuò)充與完善,對(duì)SAR圖像艦船目標(biāo)檢測(cè)具有重要的意義。
目前相對(duì)成熟的生成圖像方法是通過(guò)GAN產(chǎn)生新的圖像。隨著GAN的發(fā)展,其生成的圖像越來(lái)越逼真,比較典型的GAN有深度卷積生成式對(duì)抗網(wǎng)絡(luò)(DCGAN)[9]、信息最大化生成式對(duì)抗網(wǎng)絡(luò)(infoGAN)[10]、像素對(duì)像素(pix2pix)生成式對(duì)抗網(wǎng)絡(luò)(pix2pix GAN)[11]等,但是鮮有學(xué)者將其用于SAR圖像的生成。因此,本文考慮采用pix2pix技術(shù)對(duì)SAR圖像艦船目標(biāo)進(jìn)行數(shù)據(jù)增廣,首先制作一個(gè)用于pix2pix的數(shù)據(jù)集,生成800張新的SAR艦船圖像,然后用開(kāi)源圖片標(biāo)注軟件Labelimg對(duì)生成的數(shù)據(jù)進(jìn)行標(biāo)注,將標(biāo)注好的數(shù)據(jù)加入單次多盒檢測(cè)器(SSD)[12]中進(jìn)行對(duì)比分析。針對(duì)SSD檢測(cè)算法對(duì)小目標(biāo)檢測(cè)效果不佳的缺點(diǎn),本文吸收GoogleNet[13]中Inceptionv2[14]模塊的經(jīng)驗(yàn),通過(guò)一種多尺度卷積核特征提取的方式,提高了SSD檢測(cè)算法對(duì)不同尺度艦船目標(biāo)的檢測(cè)能力,實(shí)驗(yàn)結(jié)果表明改進(jìn)的SSD顯著地提高了SAR艦船檢測(cè)精度。
本文將基于pix2pix的SAR艦船數(shù)據(jù)增廣技術(shù)與改進(jìn)的SSD結(jié)合起來(lái),將生成的SAR數(shù)據(jù)加入算法中進(jìn)行多組對(duì)比分析實(shí)驗(yàn),通過(guò)對(duì)實(shí)驗(yàn)結(jié)果的分析論證得到以下兩個(gè)結(jié)論:1)采用pix2pix技術(shù)擴(kuò)充的數(shù)據(jù)集對(duì)檢測(cè)精度有一定的提高,但依然存在著上限;2)擴(kuò)充數(shù)據(jù)集對(duì)原SSD檢測(cè)算法的檢測(cè)效果要優(yōu)于對(duì)改進(jìn)SSD檢測(cè)算法的檢測(cè)效果。
1 基于pix2pix的SAR艦船數(shù)據(jù)集增廣
1.1 數(shù)據(jù)集
首先建立一個(gè)用于pix2pix的SAR艦船生成數(shù)據(jù)集(SSG),數(shù)據(jù)來(lái)源有部分SSDD中的艦船圖片、Sentinel-1數(shù)據(jù)中的部分艦船圖片,以及高分三號(hào)衛(wèi)星拍攝的部分艦船圖片共2 000張,訓(xùn)練集中圖片模式為原圖和邊緣的成對(duì)圖片,原圖和邊緣圖片尺寸大小均裁剪為256×256,其中獲得圖片邊緣圖片的算法采用標(biāo)準(zhǔn)的Canny[15]邊緣算子,測(cè)試集為空白圖片和邊緣圖片,測(cè)試集中的邊緣圖片是采用繪圖技術(shù)生成的艦船輪廓圖片,用于生成不同場(chǎng)景下的SAR艦船圖像。表1所示為部分pix2pix訓(xùn)練集和測(cè)試集的圖像。
表1 SSG數(shù)據(jù)集部分圖片
Tab.1 Partial pictures of SSG dataset

在制作測(cè)試集的過(guò)程中,盡量多加入一些較小的艦船目標(biāo),通過(guò)加入不均勻的輪廓生成港口等復(fù)雜環(huán)境,用以加強(qiáng)之后的檢測(cè)器對(duì)小目標(biāo)與不同場(chǎng)景的適應(yīng)能力。
1.2 基于pix2pix的SAR艦船生成
圖像的轉(zhuǎn)換問(wèn)題本質(zhì)上是像素到像素的映射,本文使用pix2pix生成SAR艦船圖片實(shí)現(xiàn)線(xiàn)稿圖到實(shí)時(shí)圖的轉(zhuǎn)換,結(jié)構(gòu)如圖1所示。

圖1 GAN訓(xùn)練過(guò)程Fig.1 Training process of GAN
訓(xùn)練的過(guò)程中邊緣圖像x作為GAN訓(xùn)練的條件輸入生成器G和鑒別器D中。生成器G實(shí)際上是圖像x和隨機(jī)噪聲z到y(tǒng)的映射:G:{x,z}→y.訓(xùn)練生成器G生成鑒別器D無(wú)法辨識(shí)真?zhèn)蔚膱D像,訓(xùn)練判別器D盡力地識(shí)別出偽造的圖像。
一般地,GAN目標(biāo)函數(shù)可以表示為
LcGAN=Ex,y[log2D(x,y)]+
Ex,z[log2(1-D(x,G(x,z))],
(1)
式中:E表示期望值。
G要得到函數(shù)的最小值,而D要得到函數(shù)最大值,二者互相進(jìn)行博弈。為了測(cè)試輸入條件x對(duì)判別器的重要性,也訓(xùn)練了一個(gè)沒(méi)有x的普通GAN:
LcGAN=Ey[log2D(y)]+
Ex,z[log2(1-D(G(x,z))],
(2)
同時(shí)融合了傳統(tǒng)損失函數(shù)得到最終的目標(biāo)方程為
(3)
式中:
LL1(G)=Ex,z[‖y-G(x,z)‖1].
(4)
本文使用文獻(xiàn)[16]中的生成器和判別器結(jié)構(gòu),卷積單元形式為conv-BatchNorm-Relu,生成器結(jié)構(gòu)沒(méi)有使用原始的解碼- 編碼網(wǎng)絡(luò)[17],而是模仿U-net[17]在原始的結(jié)構(gòu)中增加了條線(xiàn)連接,如圖2所示,在第j和第k-j層增加了跳線(xiàn),k為網(wǎng)絡(luò)的總層數(shù)。判別器使用馬爾可夫過(guò)程的判別器,使用傳統(tǒng)的L1-loss函數(shù)雖然會(huì)使生成的圖片產(chǎn)生模糊問(wèn)題,但是在很多情況下能夠捕捉到低頻信息,因此判別器的設(shè)計(jì)需要對(duì)高頻進(jìn)行建模,關(guān)注局部的感興趣目標(biāo)塊。判別器對(duì)每個(gè)目標(biāo)塊判別為真假,在整張圖片上運(yùn)行這個(gè)判別器,最后取平均值作為輸出。對(duì)于SAR圖像而言,這樣做能夠在測(cè)試時(shí)較好地對(duì)艦船目標(biāo)進(jìn)行重建,這是因?yàn)镾AR圖像的拍攝角度不同,質(zhì)量也會(huì)產(chǎn)生差異,而通過(guò)對(duì)所有圖片的學(xué)習(xí)能夠綜合考慮到每個(gè)目標(biāo)塊的質(zhì)量差異,使模型訓(xùn)練得更加充分。

圖2 鑒別器結(jié)構(gòu)圖Fig.2 Discriminator structure
1.3 選取生成的SAR艦船圖像評(píng)價(jià)指標(biāo)
選取信息熵、等效視數(shù)、平均梯度以及目標(biāo)長(zhǎng)寬比作為生成圖像的評(píng)價(jià)指標(biāo)。
1)熵是隨機(jī)信號(hào)中不確定度的一種表達(dá)方式,對(duì)于一幅M×N的SAR圖像,其熵表示為
(5)
(6)
式中:Pmn表示取某一灰度值l(m,n)的概率;num[l(m,n)]表示某一灰度值l(m,n)的像素?cái)?shù)目;M×N表示圖像總的像素個(gè)數(shù)。SAR圖像的信息熵越小,其包含的信息量越多;相反,SAR圖像的信息熵越大,其包含的信息量越少,圖像則會(huì)不清晰。
2)等效視數(shù)[18]常用于SAR圖像的質(zhì)量效果評(píng)估,是SAR圖像中衡量斑點(diǎn)噪聲強(qiáng)弱的標(biāo)準(zhǔn),定義為圖形均值與標(biāo)準(zhǔn)差的比值,表示為
(7)
式中:ENL表示SAR圖像的等效視數(shù);μ表示圖像的均值;σ表示圖像的標(biāo)準(zhǔn)差。
SAR圖像的等效視數(shù)越大,表明其斑點(diǎn)噪聲越弱,圖像的對(duì)比度越強(qiáng);反之,圖像的等效視數(shù)越小,其斑點(diǎn)噪聲則越強(qiáng),對(duì)比度越小,圖像的整個(gè)效果則會(huì)顯得很模糊。
3)平均梯度[18]反映了圖像邊緣附近灰度的差異,能夠反映圖像微小細(xì)節(jié)變化的速率,其計(jì)算公式為
(8)
式中:ΔIx表示橫坐標(biāo)軸方向上的差分;ΔIy表示縱坐標(biāo)軸方向上的差分。
一幅圖像的平均梯度越大,表明其層次越分明,圖像會(huì)更加清晰;相反,一幅圖像平均梯度越小,圖像會(huì)看起來(lái)較為模糊,清晰度不夠。
4)目標(biāo)長(zhǎng)寬比是指目標(biāo)最小外接矩形長(zhǎng)與寬的比值,其定義為
(9)
式中:W為最小外接矩形的長(zhǎng);L為最小外接矩形的寬。一般情況下,利用長(zhǎng)寬比r可以將感興趣的目標(biāo)與其他干擾物分開(kāi)。
1.4 對(duì)生成圖片的標(biāo)注
對(duì)艦船目標(biāo)區(qū)域的標(biāo)注使用開(kāi)源軟件Labelimg,該軟件使用Python語(yǔ)言編寫(xiě),可以對(duì)目標(biāo)區(qū)域做標(biāo)簽;標(biāo)簽中包含目標(biāo)的4個(gè)坐標(biāo)(c,v,h,w),其中(c,v)為目標(biāo)區(qū)域矩形框的左上角坐標(biāo),h為矩形框的高度,w為矩形框的寬度,根據(jù)ImageNet所使用的PASCAL VOC[19]格式存成XML文件,方便之后將標(biāo)注好的數(shù)據(jù)加入檢測(cè)器進(jìn)行訓(xùn)練。
2 基于改進(jìn)SSD的SAR艦船目標(biāo)檢測(cè)算法
2.1 SSD檢測(cè)算法的基本原理
SSD檢測(cè)算法有SSD300和SSD512兩種結(jié)構(gòu),可以用于輸入不同尺寸的樣本檢測(cè),SSD300的基本原理是基于前饋卷積網(wǎng)絡(luò),首先產(chǎn)生固定大小的默認(rèn)框集合,利用不同層次的特征圖基于所產(chǎn)生的默認(rèn)框來(lái)進(jìn)行位置的回歸和類(lèi)別的預(yù)測(cè);然后利用非極大值抑制算法對(duì)每個(gè)類(lèi)別預(yù)測(cè)到的所有先驗(yàn)框集合進(jìn)行篩選,去除多余的和概率較低的邊框,生成最終的檢測(cè)結(jié)果。相比于雙階段檢測(cè)算法,SSD檢測(cè)算法消除了雙階段檢測(cè)算法對(duì)每一個(gè)候選邊框的特征重采樣階段,使算法速度極大地提高,檢測(cè)的準(zhǔn)確度也得到了保證。
如圖3所示,SSD300的網(wǎng)絡(luò)框架由兩部分構(gòu)成,第1部分為基礎(chǔ)網(wǎng)絡(luò)架構(gòu),第2部分為附加網(wǎng)絡(luò)架構(gòu)。基礎(chǔ)網(wǎng)絡(luò)使用的是VGG16,附加網(wǎng)絡(luò)為尺度不斷減小的卷積層,在Conv4_3、Conv7、Conv8_2、Conv9_2、Conv10_2、Conv11_2共6個(gè)層提取特征圖用來(lái)預(yù)測(cè),特征圖尺寸分別為38×38、19×19、10×10、5×5、3×3、1×1,不同特征圖設(shè)置不同的先驗(yàn)框數(shù)目,先驗(yàn)框尺寸隨特征圖大小的降低呈線(xiàn)性遞增:
(10)
式中:t為特征圖的個(gè)數(shù);sk表示先驗(yàn)框與圖片的尺寸比例;smax表示比例的最大值;smin表示比例的最小值。
模型訓(xùn)練所使用的損失函數(shù)為位置誤差與置信度誤差的加權(quán)和:
(11)

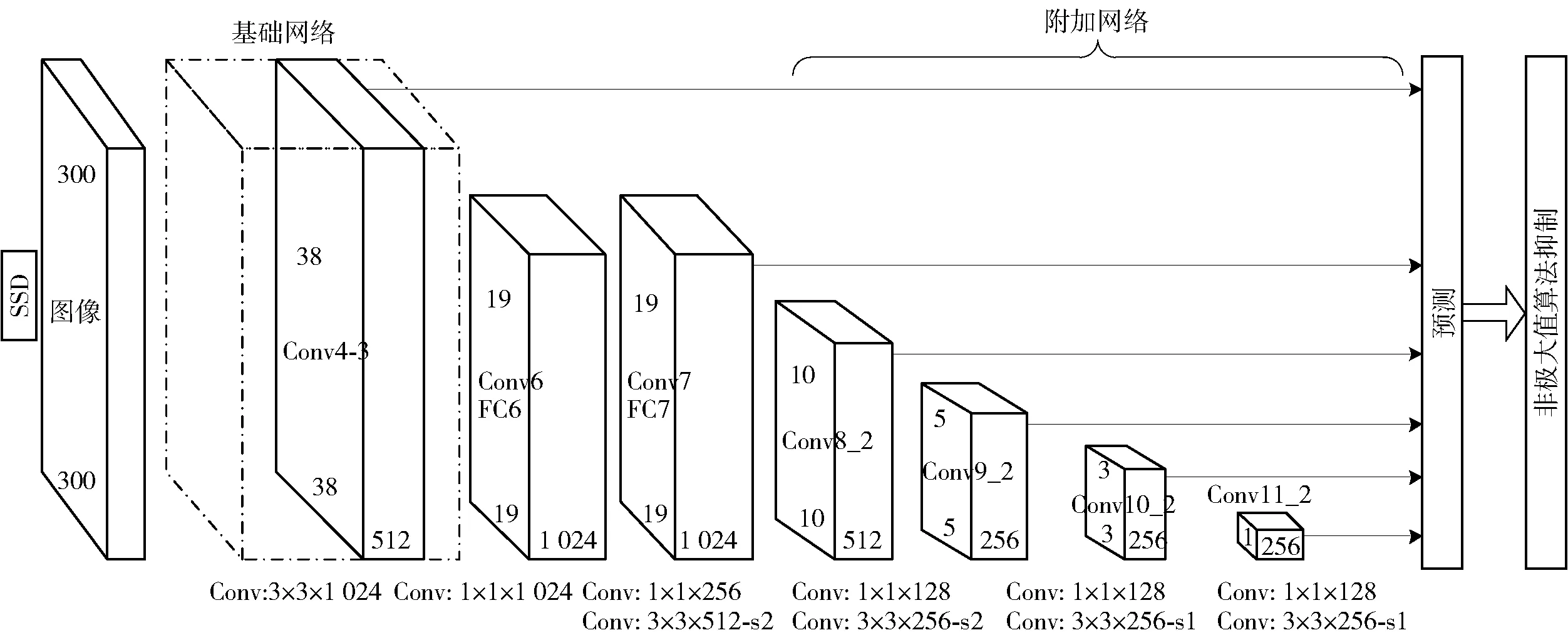
圖3 SSD網(wǎng)絡(luò)結(jié)構(gòu)圖Fig.3 SSD network structure
2.2 改進(jìn)SSD檢測(cè)算法
SSD檢測(cè)算法最大的缺點(diǎn)是對(duì)小目標(biāo)檢測(cè)效果不佳,而在SAR艦船目標(biāo)中又存在大量的像素點(diǎn)小于10的艦船目標(biāo),本文吸取GoogleNet中的Inceptionv2模塊的經(jīng)驗(yàn),SSD的前4個(gè)預(yù)測(cè)層加入Inceptionv2模塊,Inceptionv2通過(guò)增加網(wǎng)絡(luò)的寬度和增加感受野來(lái)增強(qiáng)網(wǎng)絡(luò)對(duì)不同尺度目標(biāo)的檢測(cè)能力,其主要特點(diǎn)是在多個(gè)尺寸上進(jìn)行卷積再進(jìn)行聚合。結(jié)構(gòu)如圖4所示,BN表示批歸一化處理[20],使用Relu激活函數(shù)。
在SAR艦船目標(biāo)中,存在各種不同尺寸的艦船,對(duì)前4個(gè)特征預(yù)測(cè)圖分別加入Inceptionv2模塊,通過(guò)增加網(wǎng)絡(luò)寬度來(lái)增強(qiáng)網(wǎng)絡(luò)對(duì)不同尺度艦船的適應(yīng)性,在Inceptionv2模塊中不同支路的感受野不同,第2、第3個(gè)支路中的第1個(gè)1×1卷積層是為了通過(guò)降維方式減小參數(shù)量,同時(shí)通過(guò)兩個(gè)卷積的級(jí)聯(lián)可以組合出更多的非線(xiàn)性特征,提取到特征圖更加豐富的特征。第1個(gè)支路采用1×1的卷積對(duì)特征圖進(jìn)行處理,第2個(gè)支路用3×3的卷積對(duì)特征圖進(jìn)行處理,第3個(gè)支路用兩個(gè)3×3的卷積對(duì)特征圖進(jìn)行處理,相當(dāng)于一個(gè)5×5的卷積的感受野,但是參數(shù)量大為減少,從第1個(gè)支路到第3個(gè)支路感受野逐漸擴(kuò)大,第4個(gè)支路采用池化層加1×1的卷積層來(lái)提取特征,最后將4個(gè)支路輸出的特征圖聚合,得到最終的特征預(yù)測(cè)圖。對(duì)于不同尺寸的特征圖,每一支路所用卷積核的維度不同,具體結(jié)構(gòu)如圖4所示。
在得到以上新的4個(gè)特征預(yù)測(cè)圖之后,與原SSD算法的后兩個(gè)特征預(yù)測(cè)圖組成新的6個(gè)特征圖,在新的特征圖上進(jìn)行預(yù)測(cè)。
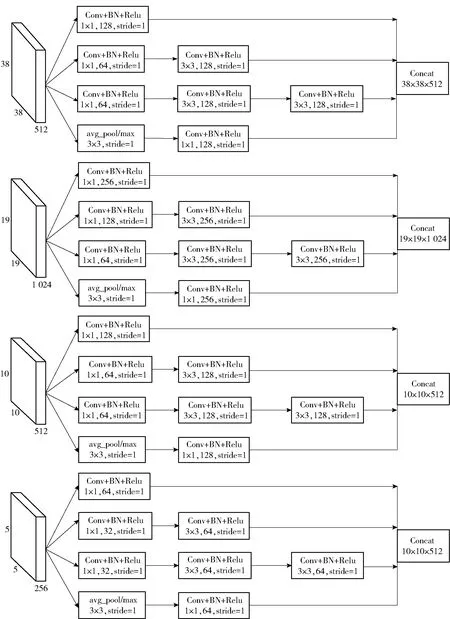
圖4 改進(jìn)的預(yù)測(cè)圖生成結(jié)構(gòu)Fig.4 Improved predictive structure
3 實(shí)驗(yàn)結(jié)果與分析
3.1 實(shí)驗(yàn)平臺(tái)
硬件平臺(tái):計(jì)算機(jī)CPU inter?Xeon(R)E5-2603v4@1.70 GHz×6,顯卡NVIDIA GTX 1080Ti GPU(16 GB內(nèi)存)。
網(wǎng)絡(luò)框架:Pytorch(使用Visdom可視化)。
編程語(yǔ)言:C語(yǔ)言和Python.
操作系統(tǒng):Ubuntu 16.04.
數(shù)據(jù)集:GAN使用本文構(gòu)造的SSG數(shù)據(jù)集,SSD檢測(cè)算法使用SSDD數(shù)據(jù)集[2]。
3.2 實(shí)驗(yàn)結(jié)果與分析
首先使用pix2pix進(jìn)行SAR艦船的數(shù)據(jù)集增廣,使用標(biāo)準(zhǔn)的方法交替訓(xùn)練生成器D和鑒別器G,使用小批量梯度下降法[21]且應(yīng)用Adam優(yōu)化器[22],在測(cè)試時(shí)使用隨機(jī)失活(dropout)[23]和批歸一化處理,訓(xùn)練一個(gè)pix2pix網(wǎng)絡(luò)。表2所示為5種典型場(chǎng)景的仿真圖像與真實(shí)圖像對(duì)比。
從表2中可以看出,生成的SAR艦船圖像已經(jīng)接近于真實(shí)的圖像,不仔細(xì)觀察難以用肉眼判別出來(lái),為了對(duì)生成的圖像做進(jìn)一步質(zhì)量效果評(píng)估,從生成的SAR艦船圖像中與SSDD中分別選取相似的典型場(chǎng)景的5張SAR艦船圖像,包括港口艦船和海面艦船,分別求出其信息熵、等效視數(shù)、平均梯度以及目標(biāo)長(zhǎng)寬比,進(jìn)而對(duì)其質(zhì)量進(jìn)行客觀評(píng)價(jià),最后對(duì)生成的圖像與真實(shí)圖像進(jìn)行客觀的比較分析。
表2 生成圖像與真實(shí)圖像對(duì)比
Tab.2 Comparison of generated and real images
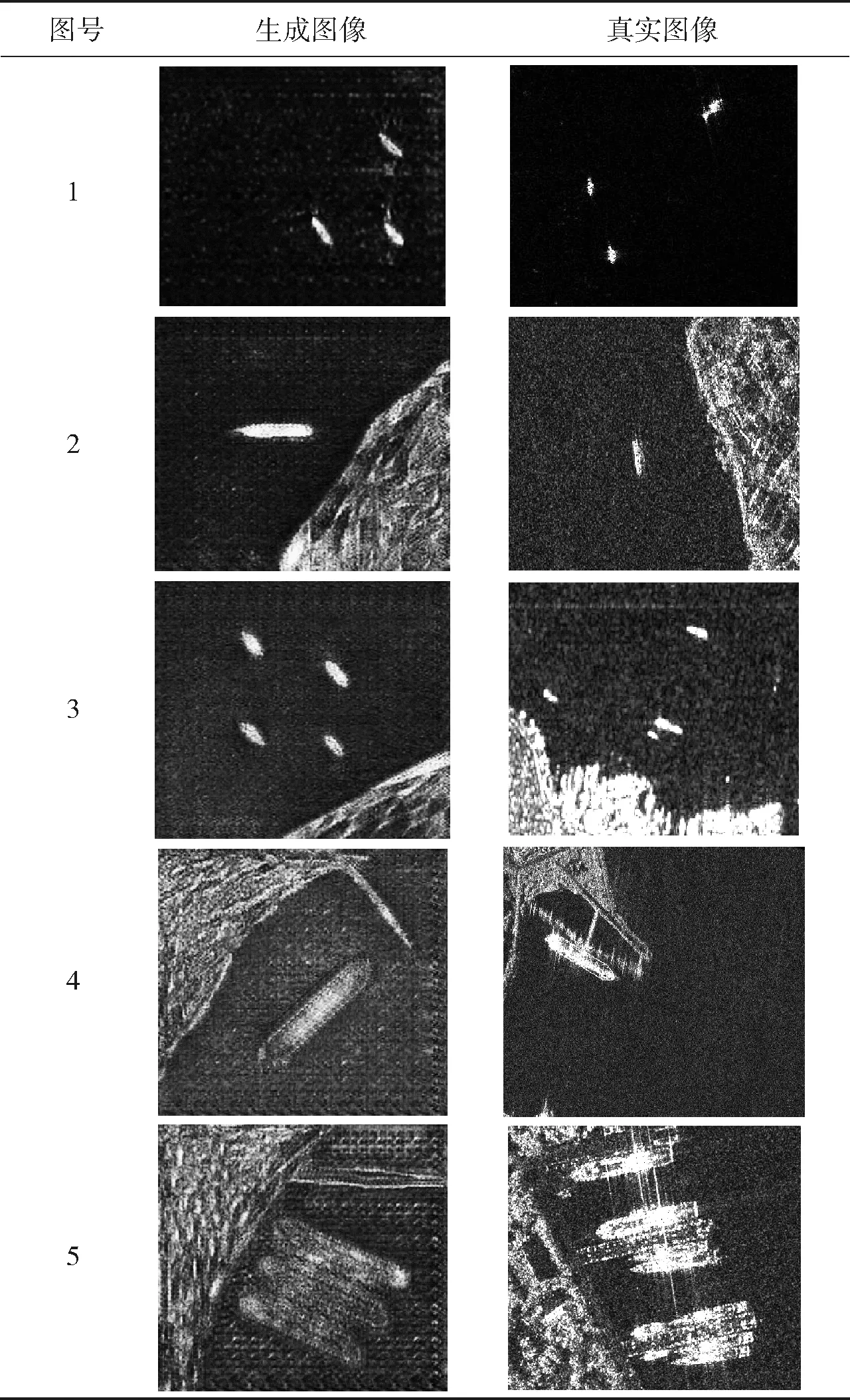
表3所示為生成圖像與真實(shí)圖像的指標(biāo)對(duì)比。從表3中可以得出,生成SAR艦船圖像信息熵與真實(shí)圖像的信息熵相差不大且略小,生成圖像的等效視數(shù)大于真實(shí)圖像的等效視數(shù),表明真實(shí)的SAR艦船圖像噪聲分布較廣,生成的SAR艦船圖像斑點(diǎn)噪聲相對(duì)較少,信息量足夠。但是生成圖像的平均梯度小于真實(shí)圖像的平均梯度,圖像的層次感依然弱于真實(shí)圖像。同時(shí)生成圖像的目標(biāo)長(zhǎng)寬比與真實(shí)圖像的目標(biāo)長(zhǎng)寬比也比較接近,表明生成的圖片與真實(shí)圖片的目標(biāo)幾何特性也具有相似性。總之,使用pix2pix生成的SAR艦船圖像與真實(shí)圖像的效果相差不大,能夠滿(mǎn)足一般的需求。
本文SSD檢測(cè)算法使用的評(píng)價(jià)指標(biāo)為平均準(zhǔn)確率。在SSDD上對(duì)本文所提出的方法進(jìn)行驗(yàn)證,驗(yàn)證在訓(xùn)練器中依次加入100、200、300、400、500、600、700、800張圖片對(duì)檢測(cè)精度的影響以及在訓(xùn)練器中加入不同張數(shù)條件下改進(jìn)SSD檢測(cè)算法對(duì)檢測(cè)器檢測(cè)精度的影響,實(shí)驗(yàn)結(jié)果如表4所示。
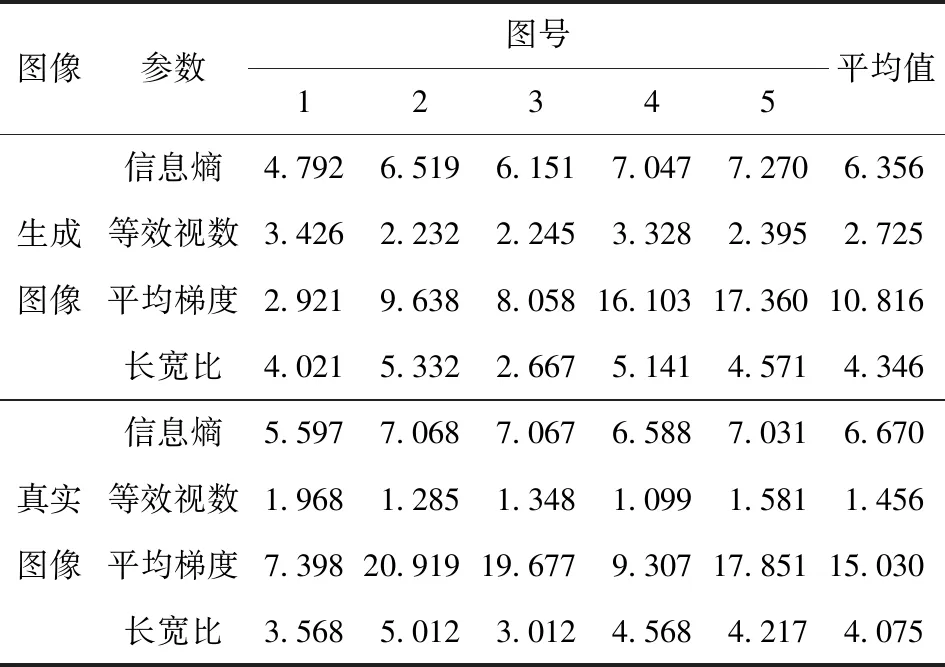
表3 指標(biāo)對(duì)比Tab.3 Comparison of indicators

表4 算法比較Tab.4 Algorithms comparison
注:√表示選擇將生成圖片加入原SSD或者改進(jìn)SSD中。
表4反映了生成圖像對(duì)檢測(cè)器性能的影響。從表4中可以看出,當(dāng)沒(méi)有將生成的樣本加入檢測(cè)器中時(shí),改進(jìn)SSD檢測(cè)算法相比原SSD檢測(cè)算法平均準(zhǔn)確率由75.6%提高到80.3%.隨著將GAN生成樣本逐漸加入訓(xùn)練器中,測(cè)試的平均準(zhǔn)確率會(huì)逐步提高,當(dāng)生成的800張樣本全部加入訓(xùn)練器中之后,原SSD檢測(cè)算法的精度由75.6%提高到79.9%,提高了4.3個(gè)百分點(diǎn),改進(jìn)SSD檢測(cè)精度由80.3%提高到82.2%,提高了1.9個(gè)百分點(diǎn)。但是從表4中仍然可以看出,對(duì)于原SSD檢測(cè)算法,當(dāng)在訓(xùn)練器中加入500張圖片時(shí)檢測(cè)精度達(dá)到79.8%,繼續(xù)向訓(xùn)練器中添加圖片,檢測(cè)的平均準(zhǔn)確率基本不再上升,對(duì)于改進(jìn)SSD檢測(cè)算法,往訓(xùn)練器中添加800張圖片檢測(cè)器性能只有1.9%的提升。對(duì)比表4實(shí)驗(yàn)結(jié)果可以發(fā)現(xiàn),使用pix2pix生成的艦船樣本對(duì)檢測(cè)器性能有一定的提高,但是檢測(cè)的平均準(zhǔn)確率不會(huì)隨著樣本數(shù)量的增加而不斷提高,使用pix2pix生成的艦船樣本對(duì)原SSD檢測(cè)算法性能提升要優(yōu)于改進(jìn)SSD檢測(cè)算法。主要有以下兩個(gè)原因:
1)使用pix2pix生成的艦船目標(biāo)行為尺度比較單一,模擬生成如復(fù)雜港口等惡劣環(huán)境下的艦船仍然比較困難,而真實(shí)海面環(huán)境下的艦船目標(biāo)變化范圍更大,斑點(diǎn)噪聲更加明顯。而正是因?yàn)樯傻呐灤繕?biāo)中缺少這些復(fù)雜環(huán)境變化等狀況,所以在檢測(cè)的過(guò)程中檢測(cè)器對(duì)復(fù)雜環(huán)境下艦船目標(biāo)的適應(yīng)能力有限,當(dāng)不斷地往訓(xùn)練集中添加生成的圖片后,檢測(cè)器性能會(huì)達(dá)到一定的瓶頸不再提升。
2)原SSD檢測(cè)算法本身存在著對(duì)小目標(biāo)檢測(cè)效果不佳的缺點(diǎn),將生成的多種尺度的艦船圖片加入檢測(cè)器中,使得網(wǎng)絡(luò)更加適應(yīng)了SAR艦船的多尺度性,使得SSD的檢測(cè)精度大大提高。當(dāng)使用改進(jìn)SSD檢測(cè)算法后,檢測(cè)器已經(jīng)適應(yīng)不同尺寸的艦船目標(biāo),對(duì)各種尺寸艦船目標(biāo)的檢測(cè)性能已經(jīng)得到提升,因此繼續(xù)向訓(xùn)練樣本中添加生成的圖片對(duì)檢測(cè)器的性能提升很有限。為了直觀地體現(xiàn),將表4中數(shù)據(jù)用曲線(xiàn)圖連接起來(lái),如圖5所示。從圖5中可以發(fā)現(xiàn):當(dāng)添加的樣本數(shù)量達(dá)到一定的數(shù)量時(shí),檢測(cè)器性能也會(huì)達(dá)到一個(gè)瓶頸,精度不再上升。

圖5 平均準(zhǔn)確率隨檢測(cè)器中添加樣本數(shù)的變化曲線(xiàn)Fig.5 Change of average precision with the number of samples added to the detector
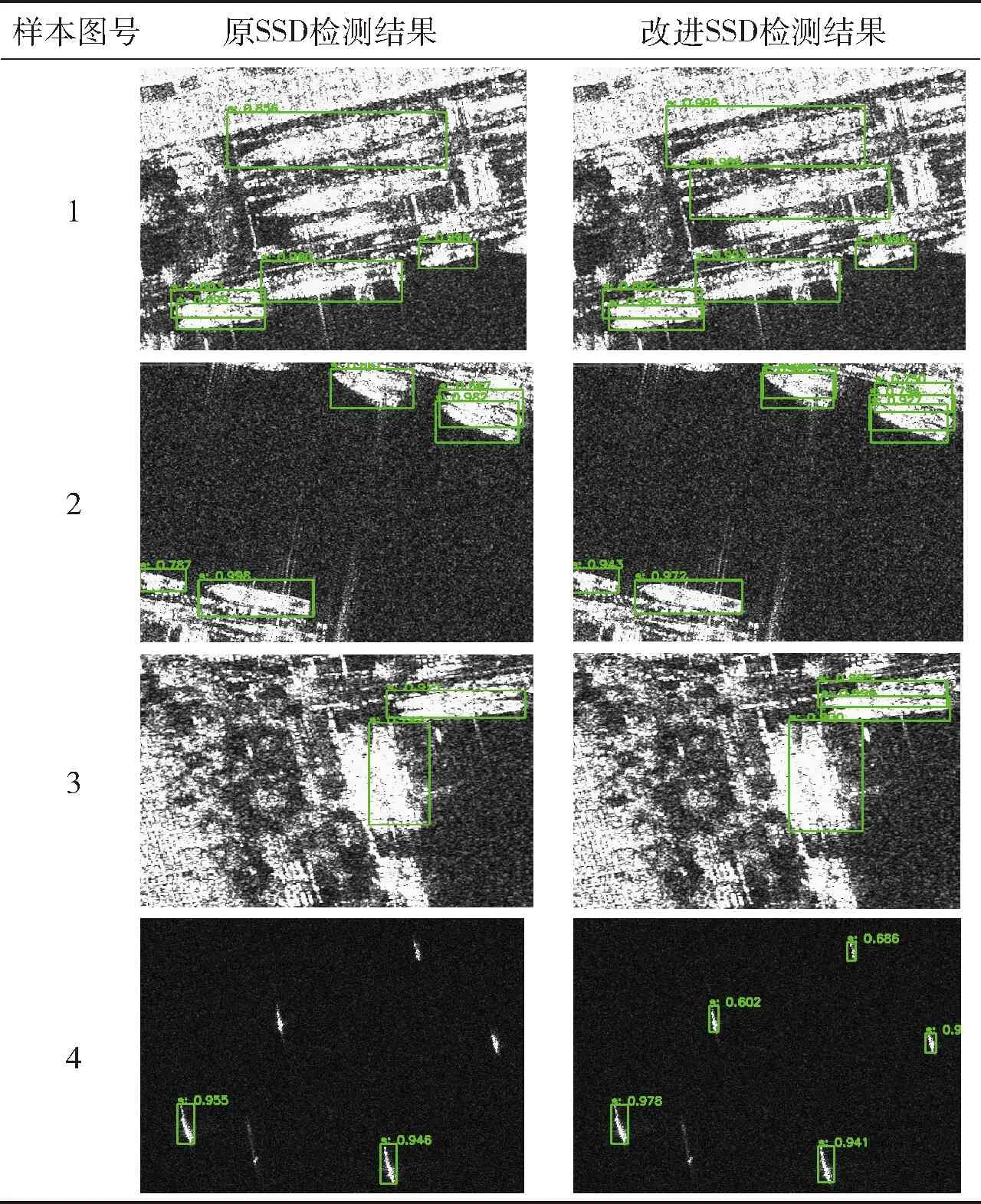
表5所示為本文所提出的方法與原SSD檢測(cè)效果對(duì)比,表5中圖片上數(shù)字表示檢測(cè)為艦船目標(biāo)的概率,圖片來(lái)源于SSDD中4種典型的難例樣本。從樣本1和樣本3的檢測(cè)結(jié)果可以看出:在斑點(diǎn)噪聲極為嚴(yán)重、圖片模糊不清的情況下,原SSD檢測(cè)算法對(duì)SAR艦船目標(biāo)的檢測(cè)性能有限,本文算法檢測(cè)效果較好,能夠適應(yīng)一定的復(fù)雜環(huán)境,對(duì)于港口和河道區(qū)域的艦船能夠直接檢測(cè)到,且不需要像傳統(tǒng)檢測(cè)算法那樣對(duì)圖片進(jìn)行海陸分離等預(yù)處理;樣本2是典型的港口區(qū)域密集停靠的艦船目標(biāo),從檢測(cè)結(jié)果可以看出,原SSD算法和改進(jìn)SSD算法對(duì)密集港口艦船目標(biāo)的檢測(cè)效果也較好,但是錯(cuò)檢嚴(yán)重,原SSD算法把上方左邊的兩艘艦船錯(cuò)檢成了一艘,上方右邊的3艘船錯(cuò)檢成了2艘,而改進(jìn)SSD算法能夠準(zhǔn)確地檢測(cè)到艦船目標(biāo)數(shù)量,檢測(cè)效果得到了提升;樣本4是典型的小目標(biāo),原SSD檢測(cè)算法對(duì)小目標(biāo)檢測(cè)算法不佳,圖中的6艘艦船只檢測(cè)到了2艘,漏檢明顯,而改進(jìn)SSD算法雖然也有漏檢,但是6艘艦船檢測(cè)到了5艘,漏檢率明顯降低。總之,相比于傳統(tǒng)的檢測(cè)算法,改進(jìn)SSD算法實(shí)現(xiàn)了端對(duì)端的SAR艦船目標(biāo)檢測(cè),雖然仍然存在漏檢的情況,但能夠滿(mǎn)足基本的需求。
表5 檢測(cè)結(jié)果對(duì)比
Tab.5 Comparison of test results
4 結(jié)論
本文提出一種基于生成式對(duì)抗網(wǎng)絡(luò)的SAR艦船目標(biāo)生成方法與一種改進(jìn)SSD的SAR艦船檢測(cè)算法。建立了一個(gè)用于產(chǎn)生SAR艦船目標(biāo)的生成式對(duì)抗網(wǎng)絡(luò)的數(shù)據(jù)集SSG,進(jìn)行了一次用生成對(duì)抗網(wǎng)絡(luò)產(chǎn)生SAR艦船目標(biāo)的有益嘗試,并將生成的SAR圖像標(biāo)注后加入原SSD檢測(cè)算法以及改進(jìn)SSD檢測(cè)算法中進(jìn)行驗(yàn)證。主要得到以下結(jié)論:
1)將產(chǎn)生的數(shù)據(jù)標(biāo)注后加入SSD中,原SSD檢測(cè)算法的平均準(zhǔn)確率由75.6%提高到了79.9%.
2)通過(guò)在檢測(cè)器測(cè)試網(wǎng)絡(luò)加入Inceptionv2模塊,提高了網(wǎng)絡(luò)對(duì)不同尺度目標(biāo)的適應(yīng)性,檢測(cè)的平均準(zhǔn)確率由原始的75.6%提高到了80.3%.
3)當(dāng)把生成的艦船數(shù)據(jù)加入改進(jìn)SSD中后,平均準(zhǔn)確率由80.3%提高到了82.2%.
通過(guò)GAN產(chǎn)生SAR艦船目標(biāo)的前提是收集大量的SAR艦船圖像并對(duì)圖像做一定的預(yù)處理,制作生成式對(duì)抗網(wǎng)絡(luò)的訓(xùn)練樣本,生成的SAR圖像需要進(jìn)行標(biāo)記才能夠加入檢測(cè)器中,過(guò)程中需要消耗大量的人力物力。但是從實(shí)驗(yàn)結(jié)果中仍然能夠發(fā)現(xiàn)生成的SAR艦船數(shù)據(jù)行為單一,對(duì)檢測(cè)器的性能提升仍然存在上限。
在將來(lái)的工作中,將進(jìn)一步完善SSG數(shù)據(jù)集,改進(jìn)生成對(duì)抗網(wǎng)絡(luò)結(jié)構(gòu),以滿(mǎn)足生成復(fù)雜環(huán)境下艦船目標(biāo)的需要,使之能夠更好地提高目標(biāo)檢測(cè)性能。
猜你喜歡
中國(guó)設(shè)備工程(2022年12期)2022-07-11 04:33:00
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年9期)2019-11-25 07:34:36
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年9期)2019-11-25 07:34:34
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年12期)2019-05-21 02:53:50
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年12期)2019-05-21 02:53:48
