基于Hough變換的水中氣泡群特征參數提取方法研究
2020-01-08 00:35:36覃若琳蔣曉剛金良安高可心
兵工學報 2019年12期
關鍵詞:檢測
覃若琳,蔣曉剛,金良安,高可心
(海軍大連艦艇學院 航海系,遼寧 大連 116018)
0 引言
目前,基于艦船氣泡尾流的聲制導作為尾流自導魚雷的主要制導方式,利用尾流區與普通海面對聲波散射強度的差異進行制導[1]。而艦船氣泡尾流場聲散射強度主要取決于尾流氣泡群的氣泡數密度和尺寸分布兩個特征參數[1]。因此,艦船氣泡尾流場特征檢測是艦船隱身性能研究和尾流自導魚雷制導效能研究的基礎。
目前用于水中氣泡群特征檢測的方法主要是基于高速攝影的直接圖像采集法,即通過高速攝像機采集水中氣泡群圖像,用數字圖像處理技術從圖像中識別出氣泡群的數密度和尺寸分布信息。水中氣泡群圖像噪點多、氣泡重疊度大,因此準確檢測圖像中的氣泡并對其進行計數和尺寸識別,是氣泡圖像處理的難點。王維[2]針對激光切片法采集到的模擬尾流氣泡群圖像,提出一種基于特征向量的K近鄰(KNN)學習尾流氣泡粒子識別方法,來識別尾流序列圖像中的深度疊加、遮擋、殘缺成像等多種成像狀態的氣泡粒子;但這種方法依賴于精密的激光圖像采集系統,工程應用難度大。王紅一[3]提出一種基于圖像背景像素傳染的氣泡填充算法和基于Hough變換的三維氣泡橢球體重構方法,實現了對單個稀疏氣泡的特征提取及橢球氣泡的三維重構。孟欣東[4]提出動態閾值壓縮的大津法進行閾值分割,實現了單個稀疏水下氣泡的特征提取。另外還有一些學者采用閾值分割、分水嶺分割等方法,對水中氣泡群圖像進行特征提取處理。但是對于氣泡數密度高、重疊度大、噪聲大的艦船氣泡尾流場圖像,上述方法的處理結果不甚理想。
本文針對艦船尾流氣泡群圖像氣泡數密度大、重疊度高的問題,提出一種基于改進Hough變換的水中氣泡群特征參數提取方法,實現對大數密度、多重疊水中氣泡群圖像的氣泡檢測及氣泡半徑分布計算。用上述方法對實驗室采集到的水中氣泡群圖像氣泡數及尺寸分布進行檢測,并與圖像實際氣泡數進行比對,檢驗了該算法的準確性。
1 水中氣泡群特征參數提取步驟與方法
1.1 水中氣泡群特征參數提取的基本思想
水中氣泡群特征參數提取的步驟如圖1所示,主要分為水中氣泡群圖像采集、像素尺寸比例計算、水中氣泡群圖像預處理和水中氣泡群特征參數檢測。特征參數檢測通過改進Hough變換的方法實現。

圖1 水中氣泡群特征參數提取流程圖Fig.1 Flow chart of characteristics extraction of bubble group
1.1.1 水中氣泡群圖像采集
本文分析的水中氣泡群圖像是基于實驗室艦船尾流氣泡群模擬裝置及氣泡群圖像采集裝置獲得的,實驗裝置示意圖如圖2所示。圖2中組件為鋼化玻璃水槽,尺寸為0.6 m×0.6 m×2.0 m;艦船尾流氣泡群模擬裝置由微孔陶瓷陣列、空氣壓縮機、儲氣罐和調壓閥組成,空氣壓縮機儲存高壓空氣,通過管路輸送至微孔陶瓷陣列,空氣經微孔陶瓷釋放到水中形成微小氣泡,形成的氣泡半徑量級約為100 μm,與艦船尾流氣泡尺度相當[5-7]。圖像采集系統由中國SupFire公司生產的神火L6型遠程強光手電、狹縫和美國GOPRO公司生產的HERO BLACK6高速運動相機組成。黑暗環境下,強光手電發出的光經狹縫輸出一道寬度很窄的光帶,氣泡上升至光帶時便會被照亮,在相機中成像,從而采集到氣泡群的實時圖像。這樣采集到的圖像與全場氣泡群圖像相比,能夠避免大景深帶來的氣泡之間高度重疊問題,減輕圖像處理的難度。經過狹縫的光帶厚度約為4 mm,即采集到的氣泡群圖像景深為4 mm.用上述方法采集到的典型水中氣泡群圖像如圖3所示,圖像尺寸為600像素×600像素。
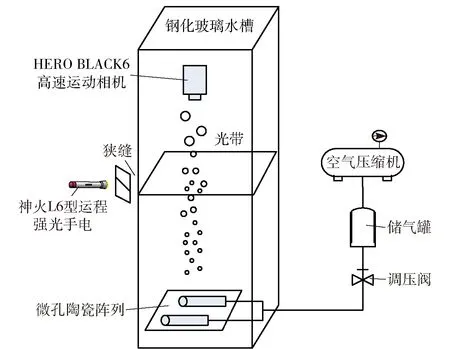
圖2 實驗裝置示意圖Fig.2 Schematic diagram of experimental device
1.1.2 像素尺寸比例計算
數字圖像處理只能得到像素尺寸,要計算氣泡實際的數密度和半徑,就要校驗圖像中一個像素對應的實際尺寸。氣泡群圖像采集裝置中,相機鏡頭到光切面的垂直距離為50 mm,用相機在相同垂直距離上拍攝一個尺寸已知的參照物,用數字圖像處理得到參照物在照片上的像素尺寸,將像素尺寸與實際尺寸進行比對,即可得到圖像的像素尺寸比例,即一個像素對應的實際尺寸。
選取一個40 mm×40 mm的矩形作為參照物,拍攝的參照物圖像如圖4所示。矩形在圖像中占21 831 000個像素點,從而可得像素比例為1像素=8.561 μm.
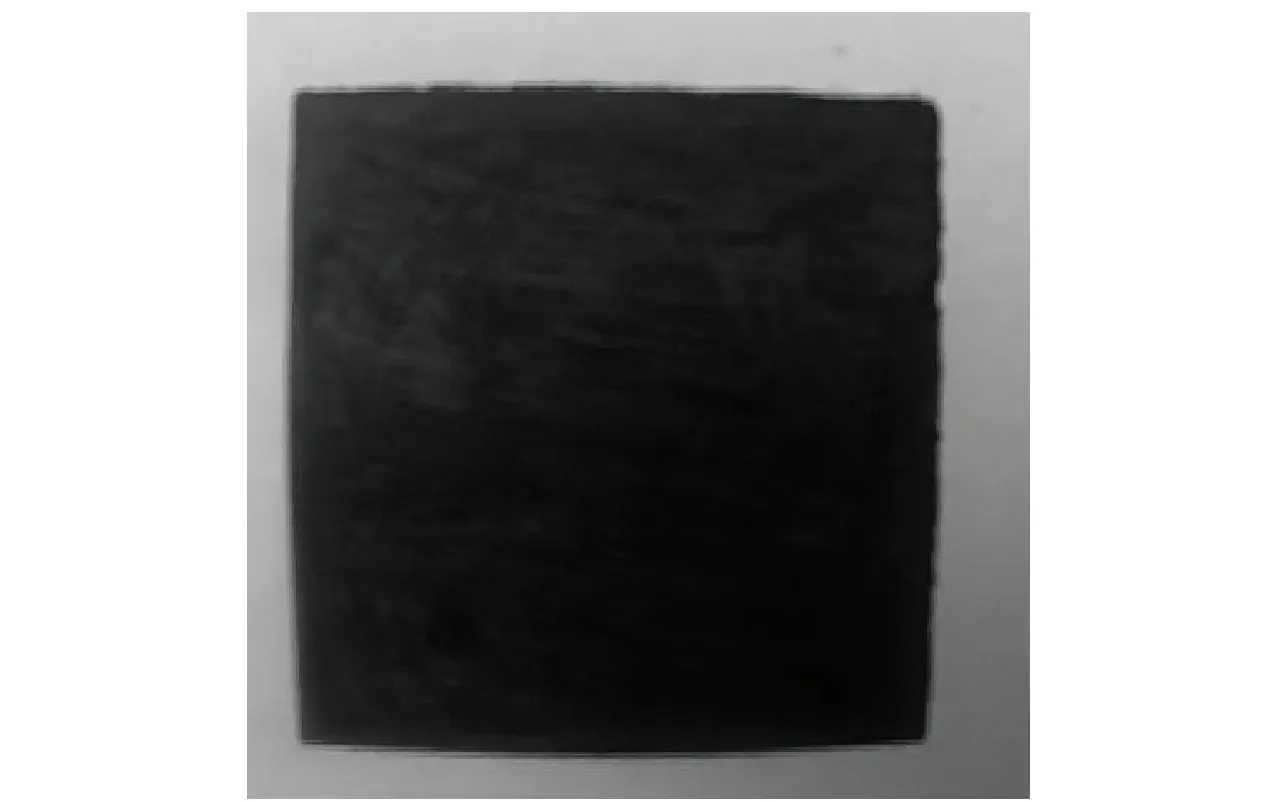
圖4 參照物圖像Fig.4 Image of reference object
1.1.3 水中氣泡群圖像預處理
水中氣泡群圖像預處理的目的是提高后續特征參數檢測的精度,主要包括圖像灰度化、保持邊界濾波和邊緣檢測。
相機拍攝的原始氣泡圖像存在兩個影響檢測精度的問題:1)噪聲的存在會使后續圖像分割成為無效分割,導致氣泡檢測無法繼續進行;2)景深造成的亮度較低氣泡會由于對不上焦而變得模糊,使其在背景中不夠突出、邊緣不夠明顯,增加了檢測難度。這些因素都會對氣泡檢測精度造成較大影響,因此需要對原始圖像進行預處理。
1.1.4 水中氣泡群特征參數檢測
水中氣泡群特征參數檢測是特征提取的核心步驟,主要為基于改進Hough變換的氣泡群特征參數提取。
對圖像進行預處理后,就可以對氣泡群特征參數進行檢測。本文用圓形Hough變換理論與方法進行氣泡的自動檢測與計數。Hough變換實現了從圖像空間到參數空間的投影[8-9],可以實現圖片中任意圖形的檢測;只要給出一個圖形的描述模型如圖形的描述方程或函數等,再用這個模型遍歷圖像空間,把屬于該模型的點映射到參數空間[8-9],最后通過參數空間投票選出峰值來確定要檢測的圖形。Hough變換對圖像的噪聲點不敏感,可有效地濾除噪聲的影響,獲得較高檢測精度。圓形Hough變換是一種用于檢測圓的Hough變換[10]。由于艦船氣泡尾流場中的氣泡半徑是微米級,在運動過程中幾乎不發生變形,可認為是圓形氣泡,因此可用圓形Hough變換進行氣泡檢測。
由于氣泡對光線的散射,圖像中氣泡邊緣有一定程度的光暈和突刺,使得氣泡邊緣有厚度且不夠平滑,同時會使圖像區域的光線不均勻,從而產生背景噪聲。傳統Hough變換應用到本文獲得的水中氣泡群圖像時,累加器中會存在一些多余的附加峰值,使得多余的非氣泡圓被檢測出來。為了提高檢測精度,本文對傳統Hough變換進行改進,采用灰度值徑向分布篩選法和圓心距離篩選法對累加數組中的峰值進行進一步篩選,濾除不是氣泡峰值的附加峰值。
1.2 水中氣泡群圖像預處理
圖像預處理步驟包括圖像灰度化、保持邊緣濾波和邊緣檢測。
1.2.1 圖像灰度化
灰度圖像只有一個通道的數據,可以很好地反映圖像的對比度、目標邊緣以及形態特征。目前,基于圖像的目標識別、目標特征提取的理論與方法基本上是基于灰度圖像。因此需要將相機拍攝的彩色RGB圖像轉換成灰度圖像。圖5所示為一張灰度化后的氣泡圖像。
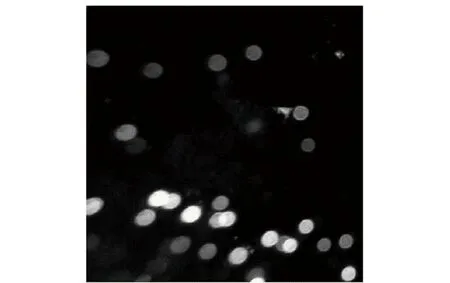
圖5 灰度化后的氣泡圖像Fig.5 Grayscale image of bubble group
1.2.2 保持邊緣濾波
為了降低圖像中的噪聲,需要用平滑濾波器對圖像進行處理。
常用的平滑濾波器有算數均值濾波器、幾何均值濾波器、中值濾波器。算數均值濾波器和幾何均值濾波器能對高斯噪聲和均勻分布噪聲有較好的抑制效果,但會產生模糊圖像的副作用,算數均值濾波器更是會使圖像發生很大程度的失真,對于微米級氣泡群圖像而言,平滑濾波器會削弱氣泡的邊緣信息,而氣泡的邊緣信息對后續的特征參數提取有重要意義,且對脈沖噪聲的抑制效果較差;中值濾波器能較好地抑制脈沖噪聲,但對高斯噪聲抑制效果較差[11]。因此,本文對平滑濾波器進行一定的改進,使其在抑制噪聲的同時也能盡可能地保留氣泡的邊緣信息,稱為保持邊緣濾波器。
保持邊緣濾波器的原理為,在待處理像素周圍的n×n板塊中,選擇k個與待處理像素灰度值之差最小的像素,用這k個像素灰度值均值作為待處理像素的灰度值。如圖6所示,取待處理像素為中心的3×3板塊(圖中灰色區域),在板塊的9個像素中,求與待處理像素灰度值之差最小的5個像素灰度值均值,作為待處理像素的灰度值[2](圖6中,與待處理像素灰度值之差最小的5個像素灰度值分別為114,111,107,124,100;均值為111,于是待處理像素灰度值由114變為111)。

圖6 保持邊緣濾波器原理示意圖Fig.6 Schematic diagram of edge keeping filter
保持邊緣濾波器結合了均值濾波器和統計排序濾波器的優點,由于取的是鄰域內與待處理像素灰度值差值最小的像素做均值,不會出現兩個區域信息的混疊平均,對圖像目標及目標邊緣的清晰度保持程度較傳統的平滑濾波器有明顯提高,而且在抑制高斯噪聲的同時也對脈沖噪聲有很好的抑制效果。濾波前后的灰度圖像如圖7所示,濾波前后圖像的幅度譜如圖8所示。由圖8可見圖像的高頻分量得到抑制,而從圖7看,氣泡的邊緣信息得到較大程度的保留,用這種保持邊緣濾波的方法在降噪的同時能較好地保持邊緣清晰度。

圖7 保持邊緣濾波前后氣泡群圖像對比圖Fig.7 Images of bubble group before and after edge keeping filtering

圖8 保持邊緣濾波前后幅度譜對比Fig.8 Amplitude spectra of bubble group before and after edge keeping filtering
1.2.3 邊緣檢測
邊緣檢測是基于灰度突變分割圖像的常用方法,能夠將圖像中目標的邊緣信息提取出來,為后續目標檢測和識別奠定基礎。本文采用Canny邊緣檢測器提取氣泡的邊緣信息。Canny邊緣檢測器檢測邊緣錯誤率低、邊緣點定位精度高、邊緣點響應單一,相比于迄今為止開發出的Prewitt、Sobel、Robert等常用邊緣檢測器,對氣泡群圖像的邊緣檢測效果更為優秀[11]。
Canny邊緣檢測的效果對后續基于Hough變換的氣泡識別準確性有很大影響。邊緣檢測中沒有被檢測出邊緣的氣泡,將無法在后續的進一步檢測中被檢測出來;另外,如果邊緣檢測中檢測出許多噪聲邊緣,使得邊緣像素過多過雜,將會使后續檢測消耗大量時間。因此必須提高邊緣檢測的精度,使圖像中氣泡邊緣能夠被識別出來的同時,又盡可能少地將噪聲邊緣識別出來。對于Canny邊緣檢測,就是要選好合適的閾值。經過對大量采集到的氣泡群圖像進行Canny邊緣檢測實驗,對比檢測結果可知:當Canny邊緣檢測的高閾值為0.1、低閾值為0.04時,氣泡邊緣檢測效果最好。圖9所示為氣泡群圖像Canny邊緣檢測的結果。

圖9 Canny邊緣檢測結果Fig.9 Detected result of Canny edge
1.3 基于改進Hough變換的氣泡群特征參數檢測
基于改進Hough變換的氣泡群特征參數檢測,可分為參數空間投票和峰值篩選兩個步驟。
1.3.1 參數空間投票
建立一個圖像空間(x,y)。圓在圖像空間中的表達式如(1)式所示:
(x-a)2+(y-b)2=r2,
(1)
式中:a、b分別為圓心像素在圖像空間中的行列坐標;x和y分別為圖像空間的行坐標和列坐標;r為圓的像素半徑。將(1)式寫成(2)式:
(a-x)2+(b-y)2=r2,
(2)
建立一個三維參數空間(a,b,r),圖像空間中的每一個像素構成參數空間中的一個圓錐面,所有像素則為一圓錐面簇,如圖10所示。對于圓形邊界,邊界上的點在參數空間中對應的圓錐面將會相交于同一個點(a0,b0,r0),如圖11所示。為參數空間中的每一個點(a,b,r)建立一個累加器,每有一個圓錐面經過這個點,則該累加器加1,相當于對點(a,b,r)代表的以(a,b)為圓心、以r為半徑的圓進行投票,票數越高表明這個圓存在于圖像中的可能性越高。參數空間所有點的累加器構成累加數組,累加數組中大于一定閾值(本文閾值設為0.3)的點為峰值,即為Hough變換檢測出的圓[12-15]。在算法實現上,遍歷每一個檢測出的邊界像素,在每個邊界像素上求出所有可能的圓心位置,并在該圓對應的參數空間累加器上加1,從而實現對該可能存在的圓的投票。
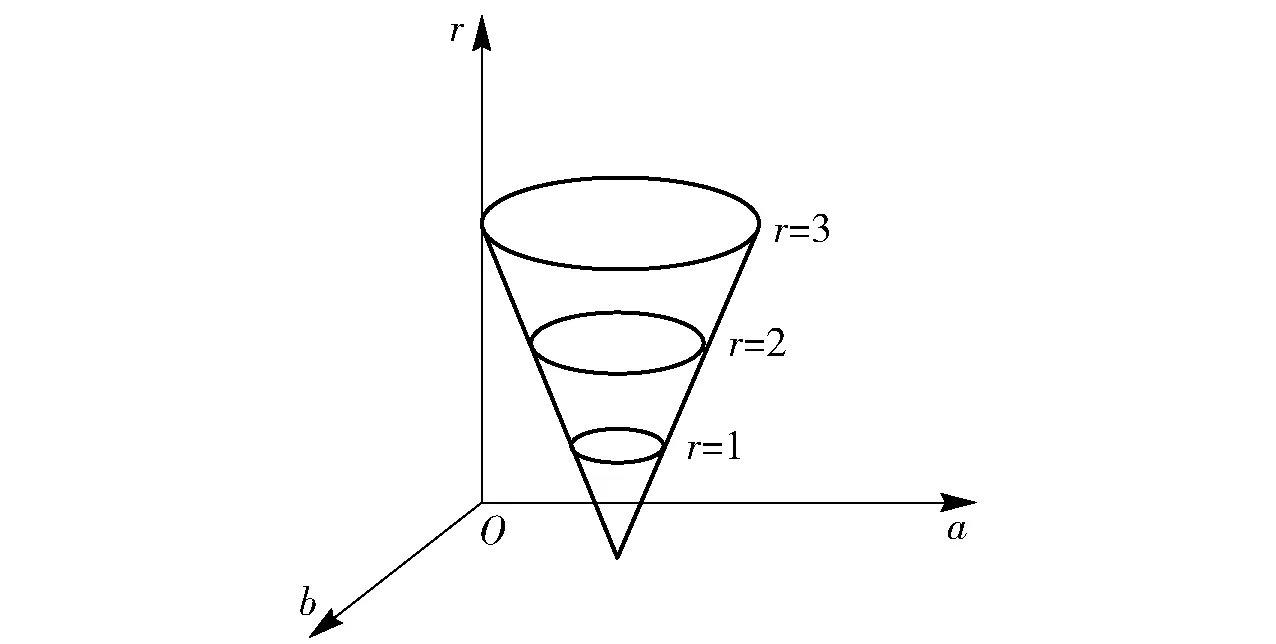
圖10 圓周上的點在參數空間中表示為圓錐面Fig.10 Point on the circumference as a circular conical surface in the parameter space
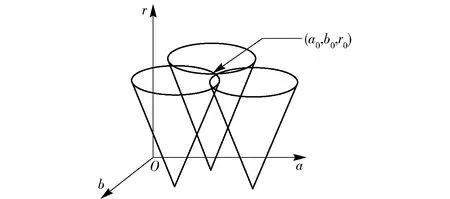
圖11 圓在參數空間中表示為圓錐面簇Fig.11 Circle as a conical surface cluster in the parameter space
1.3.2 峰值篩選
為了濾除由于邊緣壁厚和背景噪聲產生的多余峰值,本文研究了灰度值徑向分布篩選法和圓心距離篩選法,并對參數空間累加器中的峰值進行篩選[12]。
1.3.2.1 灰度值徑向分布(Trd)篩選法
通過圖像中氣泡圓心周圍像素的灰度徑向分布Trd來篩選,Trd可以表示為
(3)
式中:g(x,y)為像素(x,y)的灰度值。將Trd值與一個絕對值比較,當Trd小于該絕對值的峰值時被認為是有效峰值,當Trd大于該絕對值的峰值時被舍棄。經過一系列氣泡圖像的評估,有效峰值的Trd應小于0.9.
Trd篩選可以有效過濾氣泡壁和背景噪聲產生的峰值,整體可過濾掉10%~20%的無效峰值。圖12所示為經過Trd篩選前后的氣泡檢測圖像。圖12中紅色的圓表示檢測出的氣泡,圓的半徑即為氣泡半徑,十字符號表示圓心。

圖12 Trd篩選前后對比圖Fig.12 Images of bubble group before and after Trd filtering
1.3.2.2 圓心距離篩選法
通過比較每個候選峰與累加器陣列中其他所有峰之間的距離,可以進一步篩選無效峰值。由于圖像中氣泡拖尾、邊緣壁厚等因素,Canny邊緣檢測出的邊緣不一定是嚴格的圓,會導致在Hough變換中本應屬于同一氣泡的邊緣像素被識別為圓心十分接近的兩個氣泡,即參數空間中兩個十分接近的峰值。檢測圓心十分接近的峰值,只保留最可能是氣泡的峰值,去除其他峰值,可以過濾掉峰值篩選過程中沒有濾除的無效峰值。峰坐標(x1,y1,z1)和(x2,y2,z2)兩個圓之間的距離可以用以下公式計算:
(4)
由于圖像中氣泡拖尾、邊緣壁厚等因素產生的冗余氣泡的半徑一般小于該氣泡實際半徑,且集中于氣泡邊緣,是實際氣泡圓重疊的小圓。因此可以用以下方法進行圓心距離篩選來濾除冗余氣泡:當兩圓不發生重疊(即δ-(r1+r2)≥0)時,認為這兩個檢測出的圓都是有效氣泡。當兩圓發生重疊(即δ-(r1+r2)<0)時,若重疊寬度小于較小氣泡的半徑,則認為這兩個檢測出的圓都是有效氣泡;若重疊寬度大于較小氣泡的半徑,則認為較小氣泡是冗余氣泡,只保留較大的那個氣泡。綜上所述,對于檢測圓心十分接近的峰值,若滿足(5)式,則認為兩個峰值所表示的圓都是檢測出的有效氣泡,否則較大的圓是有效氣泡,較小的圓是冗余氣泡。
δ-(r1+r2)≥-min (r1,r2).
(5)
圓心距離篩選后留下的圓即是最終檢測出的氣泡,可以得到每個檢測出的氣泡質心位置和半徑。圖13所示為經過圓心距離篩選后的最終氣泡檢測圖像。
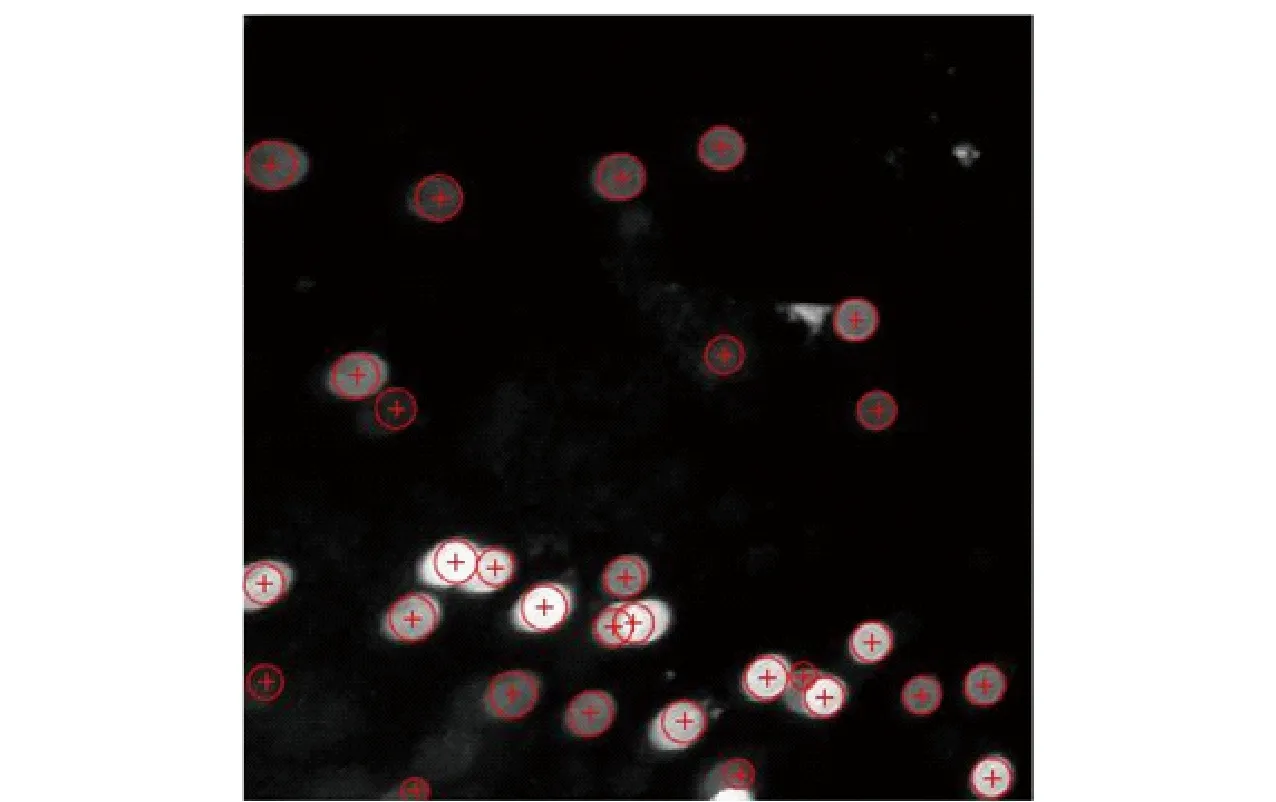
圖13 圓心篩選后的氣泡檢測圖像Fig.13 Bubble detection image after center filtering
2 基于改進Hough變換的氣泡群特征提取案例
圖14(a)~圖14(f)所示為6張不同工況下的水中氣泡群圖像,這些圖像中的氣泡數密度由小到大,用第1節水中氣泡群圖像分析方法對這6張圖像進行分析,圖14(g)~圖14(l)分別為圖14(a)~圖14(f)的檢測結果。由圖14(g)~圖14(l)可見,這6張圖片中的氣泡都清晰可見,可用人眼分辨出來,因此每張圖片中的實際氣泡數量用人眼計數得到的氣泡數量表示。表1所示為圖13(a)~圖13(f)所示6張圖像用上述圖像分析方法識別出的氣泡數與圖像的實際氣泡數的比對情況。1.1節中得到圖像中1像素=8.561 μm,光帶厚度近似為4 mm,因此拍攝區域體積可用(6)式計算;用檢測出的圖片氣泡數除以拍攝區域體積,可得到氣泡群的數密度。圖15(a)~圖15(f)所示為圖14(a)~圖14(f)所示6張圖像中的氣泡半徑分布情況。
(8.559×10-6×600)2×(4×10-3)=
1.055×10-7m3.
(6)
從圖14(g)~圖14(l)的檢測結果看,本文氣泡群圖像分析方法檢測氣泡的準確度較高,峰值篩選法明顯提高了Hough變換檢測氣泡的準確度,最終檢測出的氣泡數量、位置和尺寸與圖像中實際存在的氣泡基本相符,數量檢測誤差在7%以內。檢測誤差主要是由于景深導致氣泡亮度不一致,離鏡頭較遠的氣泡亮度較暗,與噪聲的灰度值相當,容易被當作噪聲而沒有檢測出來;另外還有極少數誤差是由于Hough變換峰值篩選階段沒有完全過濾掉的無效峰值產生的誤差,這類誤差會使算法檢測出多余的氣泡。

表1 氣泡數密度檢測結果Tab.1 Detected results of bubbles number density
3 結論
本文研究了針對艦船尾流的水中氣泡群特征參數提取方法,提出一種基于改進Hough變換的氣泡群特征參數檢測算法。將實驗室采集到的氣泡群圖像做保持邊緣濾波、邊緣檢測等預處理后,用Hough變換的原理進行氣泡檢測,進而根據檢測出氣泡圓心周圍像素的灰度值徑向分布和圓心距離對氣泡進行篩選,這種檢測方法與沒有峰值篩選的Hough變換相比,能夠減少因氣泡邊緣壁厚和背景噪聲而檢測出的多余氣泡,提高了氣泡檢測的精度。用上述方法對6張不同工況下的水中氣泡群圖像進行分析,結果表明該方法在水中氣泡群圖像特征檢測上有較好的效果,氣泡數密度檢測誤差在7%以內,為艦船尾流氣泡群特征檢測的研究提供了新的思路和手段。
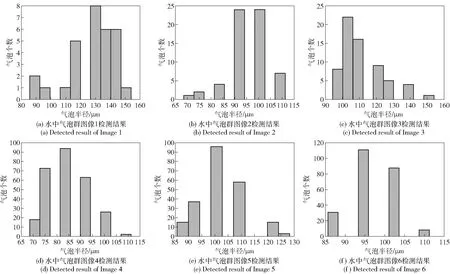
圖15 氣泡半徑分布圖Fig.15 Bubble radius distribution
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48
