考慮導彈速度變化的攻擊時間和攻擊角度控制滑模制導律
2020-01-10 01:02:12常思江李新華
彈道學報 2019年4期
關鍵詞:設計
吳 放,常思江,李新華
(1.南京理工大學 能源與動力工程學院,江蘇 南京 210094;2.西北工業集團有限公司,陜西 西安 710043)
隨著現代防御系統興起[1],僅要求導彈以最小脫靶量擊中目標的傳統制導律已不足以滿足現代戰爭需求。因此,需要研究一種能夠對導彈攻擊時間和攻擊角度進行控制的制導律,以提升導彈的突防和毀傷能力。
攻擊時間和攻擊角度控制制導律最早由文獻[2]提出,隨后眾多學者基于不同理論對其進行了研究[3-9]。文獻[3]采用模型預測靜態規劃算法,提出了能夠同時控制彈群攻擊時間和攻擊角度的協同制導方法。文獻[4]對網絡化導彈的協同攻擊問題進行了研究,基于偏置比例導引法設計了帶落角約束和攻擊時間約束的制導律。文獻[3-4]在設計制導指令時均需要估算導彈剩余飛行時間,而估算精度將對導彈命中精度造成不良影響[10-11]。為避免估算誤差對制導律的影響,文獻[5]基于成型理論,設計了無需剩余飛行時間的攻擊時間和攻擊角度控制制導律。
由于滑模控制理論具有抑制外界干擾且能夠使系統快速收斂的優點,在設計制導律時有較大優勢,因此近年來被大量文獻應用。文獻[6]通過構造視線角速率表達式,基于二階滑模理論設計了攻擊時間和攻擊角度控制制導律,但其制導指令形式較為復雜。文獻[7]以實際攻擊時間與所需攻擊時間之差作為切換條件,將制導律在攻擊時間控制制導律和攻擊角度控制制導律間切換,實現了攻擊時間和攻擊角度控制,但由于需要估算剩余飛行時間,故存在一定誤差。
上述文獻均假設導彈速度恒定,但在實際工程應用中,導彈速度往往難以保持恒定。現有攻擊時間控制制導律或攻擊角度控制制導律對導彈速度變化的解決方法可分為兩種。第一種是設計導彈切向加速度,控制導彈速度變化。如文獻[12]基于理想比例導引法設計了導彈速度可控的攻擊時間控制制導律,并通過反饋線性化增加制導律的魯棒性。第二種是將導彈速度變化作為干擾項,設計對其不敏感的制導律。如文獻[13]提出了一種僅需要導彈速度范圍的剩余時間估算方法,基于積分滑模理論設計了攻擊時間控制制導律。然而,現有文獻中對導彈速度變化時的攻擊時間和攻擊角度控制制導律研究較少,如文獻[9]根據所需攻擊時間與導彈實際速度構造標稱剩余航程,將導彈控制問題轉化為導彈實際剩余航程對標稱剩余航程的跟蹤問題,從而實現導彈速度變化情況下攻擊時間和角度的控制。
針對上述問題,本文對導彈速度可控的攻擊時間和攻擊角度控制問題進行了研究。考慮導彈與目標的相對運動關系,設計了導彈的切向加速度以控制導彈速度變化。利用成型理論設計同時滿足攻擊時間和攻擊角度控制的理想視線角變化律,基于非奇異終端滑模理論設計制導指令使實際視線角按照理想規律變化,從而實現對攻擊時間和攻擊角度的控制。
1 問題描述
考慮導彈與目標的二維運動學關系,如圖1所示,圖中,下標M,T分別表示導彈和目標;下標R表示相對量。假定導彈速度為vM,法向加速度為aM,切向加速度為aτ,目標速度為vT,導彈與目標相對速度為vR。r,γ,θ,φ分別為彈目距離、彈道角、視線角和前置角;θf為導彈擊中目標時所需的攻擊角度。所有角度以逆時針方向為正。
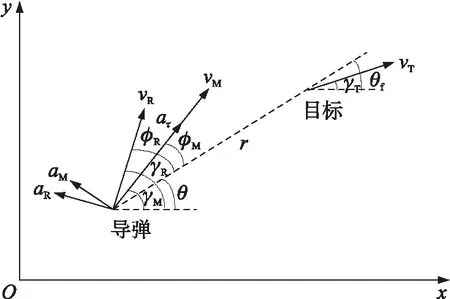
圖1 導彈與目標運動學關系
導彈與目標運動學關系為

(1)
(2)
(3)
(4)
由圖1還可得如下關系:
vR=vM-vT
(5)
φR=γR-θ
(6)

(7)
(8)
aM=cos(γR-γM)aR
(9)
根據式(5)、式(6)所示的相對關系,可將式(1)、式(2)簡化為如下形式[14]:
(10)
(11)
若通過合理控制導彈的切向加速度aτ,改變導彈速度vM,則能夠保持相對速度vR不變。此時可將運動目標的制導問題轉化為靜止目標的制導問題。導彈切向加速度表達式為
(12)
綜上,本文研究的問題可以描述為設計導彈切向加速度和法向速度,使導彈與目標的相對速度保持不變,并在所需攻擊時間td以所需攻擊角度θf擊中目標,即滿足如下關系式:
(13)
2 制導律設計
本文將成型理論和非奇異終端滑模理論結合,設計了滿足攻擊時間和攻擊角度同時控制的制導律,設計思路如下:
①基于成型理論設計同時滿足攻擊時間和攻擊角度控制的理想視線角多項式,并通過優化理論計算出多項式的系數,從而確定理想視線角的具體表達式;
②以實際視線角與理想視線角之差作為狀態變量,利用非奇異終端滑模理論,設計制導指令使導彈實際視線角按照理想視線角變化,從而實現攻擊時間和攻擊角度的同時控制。
2.1 理想視線角設計
在設計理想視線角表達式之前,需要說明的是,式(8)、式(10)~式(11)均為關于時間的導數,為便于問題研究,本節需將其轉換為關于水平位置x的導數。對任意變量a的轉換關系如下:
(14)
根據式(14)所示轉換關系,可將式(8)、式(10)~式(11)改寫為
(15)
(16)
(17)
基于成型理論設計制導律的主要思想是找到一個理想的視線角變化曲線,通過增大或減小視線角以改變導彈彈道,使導彈能夠在所需的攻擊時間以所需的攻擊角度擊中目標。在設計理想視線角變化規律的多項式時,存在多種滿足期望條件的候選函數[5-6,10-11]。為簡單起見,本文設計如下理想視線角速率多項式:
(18)
式中:σi(i=1,2,…,5)為常數,x0為導彈與目標初始水平距離。
對式(18)積分,得到理想視線角多項式為
(19)
對式(18)關于xR求導數,得:
(20)
θd(xR=0)=θ0
(21)
(22)
為保證導彈擊中目標,視線角速率必須在導彈到達目標位置時為0,故有:
(23)
為滿足攻擊角度控制,在擊中目標時,視線角應滿足如下條件:
θd(xR=x0)=θf
(24)
將式(21)~式(24)所示邊界條件代入式(18)~式(19),解得:
(25)
σ1取任意值時,根據式(25)所示的多項式系數計算理想視線角,若導彈按照理想視線角飛行,則能夠以所需的攻擊角度擊中目標。為了保證導彈在所需攻擊時間擊中目標,本文通過調整σ1值,以調整視線角變化規律,從而滿足:
timp→td
式中:timp為導彈擊中目標時的飛行時間,td為導彈所需攻擊時間。
為確定σ1的取值,可采用單純形法等優化方法求解最優σ1值。設計優化目標函數如下:
J=|timp-td|
在優化過程中,當J<0.01 s時終止優化。對于本文算例,取σ1的初值為0.001,得到最優σ1值的平均優化迭代次數為12次。由于優化迭代次數較少,優化速度快,因此在實際工程應用中,可在線計算σ1值。
2.2 制導指令設計
以實際視線角θ與所設計視線角θd之差作為狀態變量,即:
e=θ-θd
根據非奇異終端滑模理論[15]設計滑模切換面為
(26)
式中:β>0;p和q為正奇數,p>q。
對式(26)關于x求導數,得:
(27)


(28)
將式(28)代入式(27),得:
(29)
(30)
(31)
式中:M為設計參數,取M>0。sgn(·)為符號函數,定義為
由式(30)、式(31)可得滿足攻擊時間和攻擊角度控制的相對加速度為
(32)
將式(32)代入式(9),可得導彈的法向加速度指令為
2.3 穩定性證明
為證明在所設計制導律作用下,導彈能夠實現攻擊時間和攻擊角度控制,本節將證明制導律在Lyapunov意義下的穩定性。
選擇如下Lyapunov函數:
(33)
對式(33)關于x求導,得:

(34)
將式(29)、式(32)代入式(34),得:

(34)

(35)

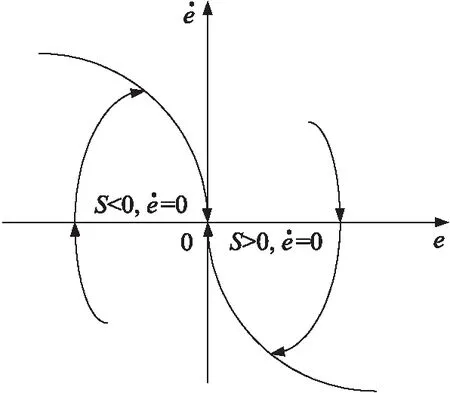
圖2 系統的相軌跡
綜上可知,本文制導律滿足Lyapunov穩定性條件,系統能在有限時間內收斂,導彈視線角按理想視線角變化,能夠實現攻擊時間和攻擊角度控制。
3 數值仿真
本節將選擇不同攻擊時間和不同攻擊角度,對所設計制導律進行數值仿真,以驗證其有效性。在進行數值仿真前需要說明,為避免加速度指令因符號函數sgn(·)的不連續而產生抖動,采用連續函數sgmf(·)代替符號函數sgn(·),定義如下:
式中:b為正常數,本文取b=0.1。
數值仿真基本參數如下:導彈初始位置(xM0,yM0)=(0,0),目標初始位置(xT0,yT0)=(7 km,7 km),導彈初始速度vM0=300 m/s,目標速度vT=150 m/s,導彈初始彈道角γM0=45°,目標初始彈道角γT0=10°,導彈最大加速度aMmax=100 m/s2。
制導參數M=300,p=5,q=3,β=1。仿真曲線如圖3和圖4所示。定義攻擊時間誤差εtd為實際攻擊時間與所需攻擊時間之差的絕對值,攻擊角度誤差εθf為實際攻擊角度與所需攻擊角度之差的絕對值。表1和表2為不同條件下的攻擊時間誤差和攻擊角度誤差。
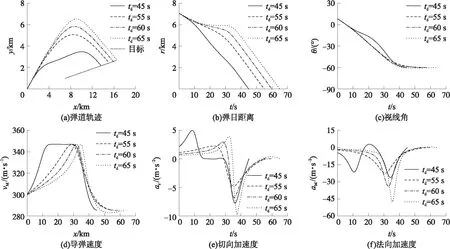
圖3 θf=-60°時的仿真曲線

圖4 td=50 s,θf=±45°,±60°時的仿真曲線
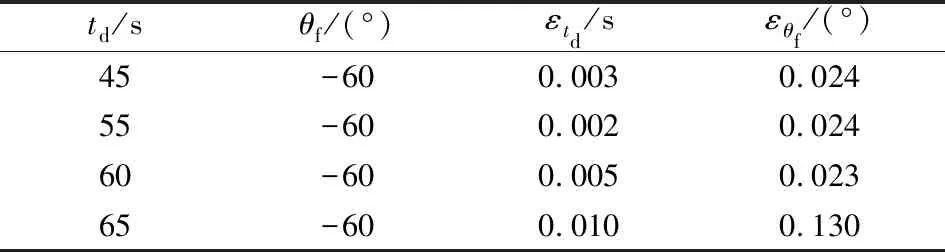
表1 θf=-60°時不同攻擊時間的攻擊時間誤差和攻擊角度誤差
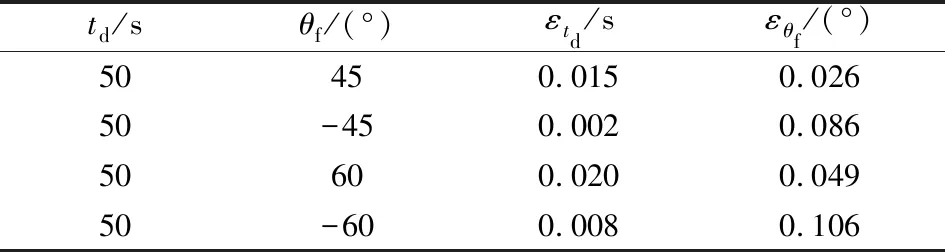
表2 td=50 s時不同攻擊角度的攻擊時間誤差和攻擊角度誤差
圖3為θf=-60°,td=45 s,55 s,60 s,65 s時的數值仿真曲線。表1為攻擊時間誤差和攻擊角度誤差。由仿真結果可知,導彈在本文制導律的作用下,均以所需攻擊時間和攻擊角度擊中目標。圖3(a)給出了導彈和目標的飛行軌跡。如圖所示,增大所需攻擊時間,會導致導彈彈道軌跡的曲率增加,導彈需要增加飛行距離以增大飛行時間。彈目距離隨時間的變化如圖3(b)所示。圖3(c)給出了導彈視線角的變化規律,由圖可知,擊中目標時導彈的視線角符合所需攻擊角度的要求。導彈的速度變化曲線如圖3(d)所示。導彈速度均先增大后減小,不同的是,所需攻擊時間越大,速度達到最大值所需的時間越長。導致速度變化的切向加速度如圖3(e)所示,其變化規律符合導彈的速度變化規律,達到最大速度之前,攻擊時間越大,則導彈切向加速度越小。圖3(f)所示為導彈法向加速度曲線,由圖可知,導彈法向加速度均為超過最大加速度限制,且在擊中目標時收斂為0。
圖4所示的為td=50 s,θf=±45°,±60°時的數值仿真曲線,表2為攻擊時間誤差和攻擊角度誤差。仿真結果表明,導彈均以所需條件擊中目標,驗證了本文制導律的有效性。導彈切向加速度在所需攻擊角度θf為負時的變化幅度小于θf為正時的變化幅度。在切向加速度的作用下,當θf為負時,導彈速度先增大后減小;當θf為正時,導彈速度進行了兩次先增后減。由于導彈初始前置角為正,故θf為正時,導彈需要更大的機動能力調整彈道以滿足所需攻擊時間和攻擊角度,由圖4(f)可知,θf=45°,60°時的控制能量大于θf=-45°,-60°時的控制能量,但法向加速度均在擊中目標時收斂為0。
4 結束語
針對考慮導彈速度變化的攻擊時間和攻擊角度控制問題,本文將成型理論和非奇異終端滑模理論相結合,設計了一種能夠控制攻擊時間和攻擊角度的制導律,同時對導彈的速度進行了控制。所設計制導律無需估算剩余飛行時間,避免了估算產生的誤差,適用性更強。通過理論推導,證明了該制導律滿足攻擊時間和攻擊角度控制的Lyapunov穩定性條件。針對不同所需攻擊時間和攻擊角度進行了數值仿真,結果表明,該制導律能夠較好地實現攻擊時間和攻擊角度控制。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04