基于云臺式PGK的反旋翼筒控制系統設計及仿真
2020-01-10 00:59:48張劉帥楊新民
兵器裝備工程學報 2019年12期
張劉帥,楊新民,趙 坤
(南京理工大學 瞬態國家重點實驗室, 南京 210094)
在科技快速發展的今天,對常規彈藥的制導化研究已經成為各國爭相研究的目標。其中根據氣動力進行修正的舵機系統是制導炮彈的一種重要執行機構,而采用PGK(Precision Guidance Kit)作為常規彈藥的修正方案是氣動力修正領域的代表之作[1-2]。PGK制導原理是當彈體在飛行過程中,反旋翼筒相對彈體進行反旋并在慣性空間下保持靜止,根據彈載計算機發出的控制指令來調整電機轉速改變翼筒位置,通過翼筒產生的氣動力調整彈體的俯仰和偏航姿態,從而實現精確打擊目標的目的。但由于電機性能及1:7的傳動比的影響,使反旋翼筒有一定轉速范圍,當彈體轉速不在電機驅動的翼筒轉速范圍之內時,無法與彈體轉速保持同步反旋即相對慣性坐標系下保持靜止,達不到修正的目的。基于此在傳統PGK與彈體之間增加云臺,當彈體轉速過低時,云臺相對彈體進行正轉來增加穩定平臺的轉速;同時當彈體轉速過高時,超過反旋翼筒的轉速時,云臺相對彈體反轉,降低穩定平臺的轉速,使位于穩定平臺上的反旋翼筒可以相對彈體進行同步反旋,在慣性空間下保持靜止,從而達到可以對彈體進行姿態修整的目的。在云臺式PGK整個反旋翼筒控制系統中,對電機的穩定控制進行仿真分析,是整個方案研究的重要前提,本研究就基于三閉環控制的反旋翼筒的可行性進行仿真驗證。
1 反旋翼筒控制系統
云臺式PGK的反旋翼筒控制系統采用三閉環控制(系統框圖如圖1所示),最外環采用位置環(APR),輸出一定的速度信號添加到速度環(ASR),為了增加電機的穩定性內環采用電流環(ACR)控制。在整個控制系統中[3],在彈飛行過程中根據彈體實際滾轉速度,首先判斷彈體轉速是否在反旋翼筒的轉速范圍內,如果在將彈體轉速發送給彈載計算機,經過相應計算得出反旋翼筒電機的目標轉速,將其作為翼筒偏轉指令信號來控制翼筒偏轉。如果不在,彈載計算機根據實測彈體轉速與反旋翼筒的轉速范圍相比較,解算出云臺的旋轉速度及方向,在云臺轉速穩定后,彈載計算機接收相應的彈體轉速與云臺轉速,計算出反旋翼筒電機的目標轉速作為偏轉指令來控制翼筒偏轉。彈載計算機根據彈的飛行姿態進行解算,對反旋翼筒進行方向及角度進行控制,從而控制彈的飛行姿態。
由系統框圖(如圖1)可知,根據彈體速度,翼筒速度和云臺速度得到的當前舵偏角與打舵指令形成偏差信號,經過位置環PID調解后形成一定的速度跟隨量,并與當前的彈體速度和舵機速度形成偏差信號經過轉速環PID調解形成電流參考信號,電流參考信號與三相電流實際信號的偏差量,經過電流滯環控制器生成PWM控制信號,PWM信號作為三相逆變器的輸入,通過調解其脈沖寬度來控制電機的速度。在本系統中位置環和速度環均采用PID控制,電流環之所以采用電流滯環的控制方法,因為電流滯環的控制方法的本質是對三相實際電流的跟蹤監控,可以提高系統的抗干擾性以及增強其穩定性,由于彈體在飛行過程中舵機需要較高的動態性能,輸出負載不斷高速變化,然而經典的PID控制對于這種變化的負載反應較為敏感,大大影響其控制效果,所以電流環采用電流滯環的控制方法。

圖1 反旋翼筒控制系統框圖
2 反旋翼筒系統仿真模型的建立
2.1 系統執行機構無刷直流電機的數學模型
本系統的執行機構均采用兩極三相星形連接的無刷直流電機,無刷直流電機的定子是三相繞組,轉子是永磁體。在整個仿真過程中,假定無刷直流電機三相繞組完全對稱,電機鐵芯心磁路不飽和,不計渦流和磁滯損耗,忽略齒槽間,換相過程中和電樞反應等影響,反電動勢是平頂寬度為120度的梯形波[4-5]。
根據無刷直流電機的特性,定子的三相繞組結構對稱,由于定子的三相繞組結構對稱,所以每相繞組的自感,互感和電阻分別相同,L為定子繞的自感(H),M為定子繞組的互感(H),R為定子繞組的相電阻(Ω)。P為微分算子(d/dt)。當A和B項通路時,繞組線電壓方程如下:
(1)
三相星形電流關系如下:
Ia+Ib+Ic=0
(2)
由式(2)可將(1)化簡為:
(3)
且:
(4)
由式(4)可知定子三相星形繞組的等效電壓狀態方程組為
(5)
根據無刷直流電機的電壓狀態方程組,定子的三相繞組等效電路如圖2所示。
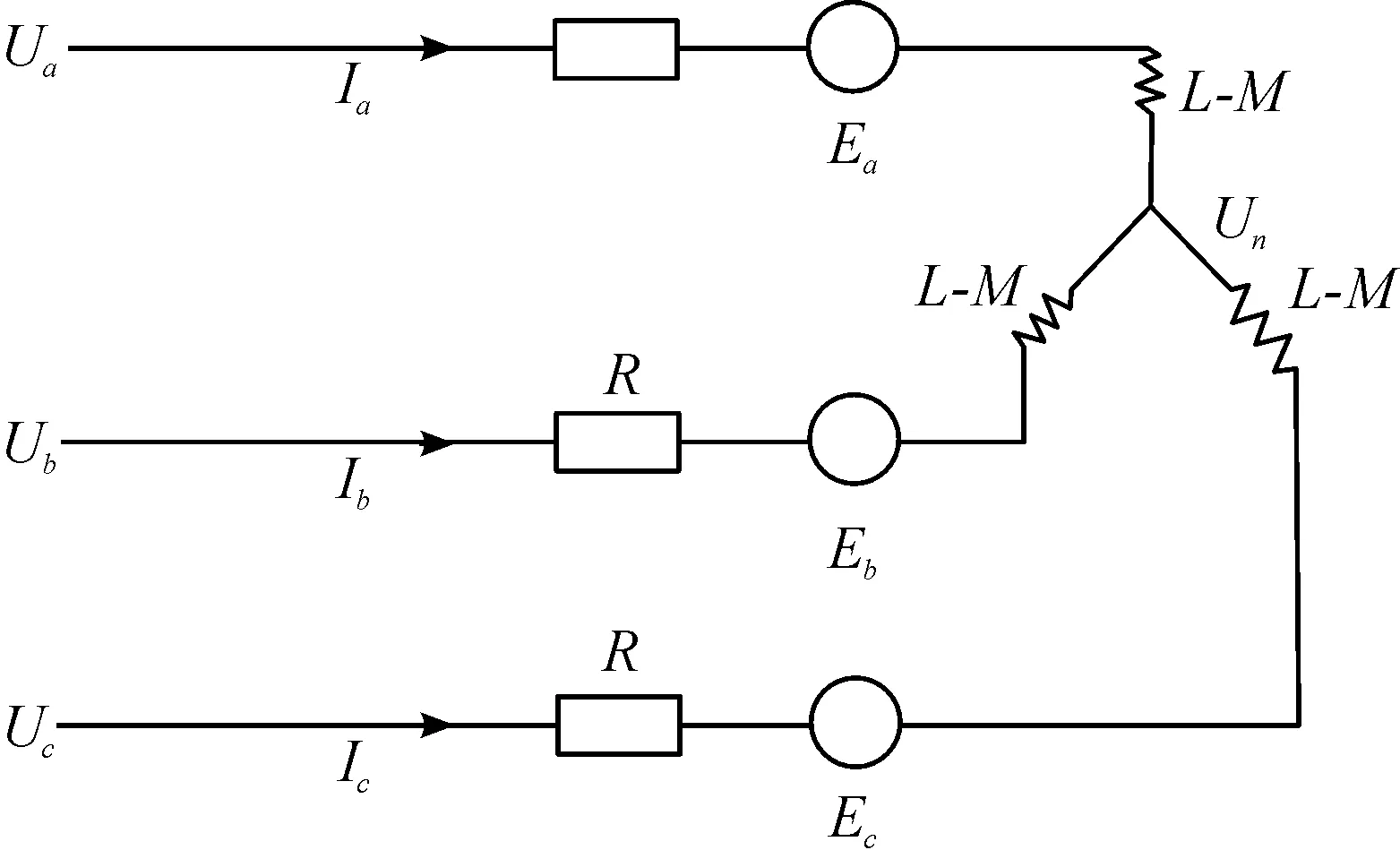
圖2 無刷直流電機等效電路圖
2.2 轉矩方程
無刷直流電機通過電流在定子繞組間產生磁場與轉子永磁體相互作用產生電磁力矩驅動轉子的旋轉,電機又通過傳動齒輪從而帶動反旋翼筒的轉動。則電機的電磁轉矩數學方程式為
(6)
電機的運動方程式為:
(7)
式中:ω為電機的轉動角速度(rad/s);Te為電機的電磁轉矩(N·m);J為電機轉子的轉動慣量(kg·m2);B為電機轉動時的阻尼系數(Nm·s/rad);TL為電機負載轉矩(N·m)。對該模塊的建模如圖3所示。
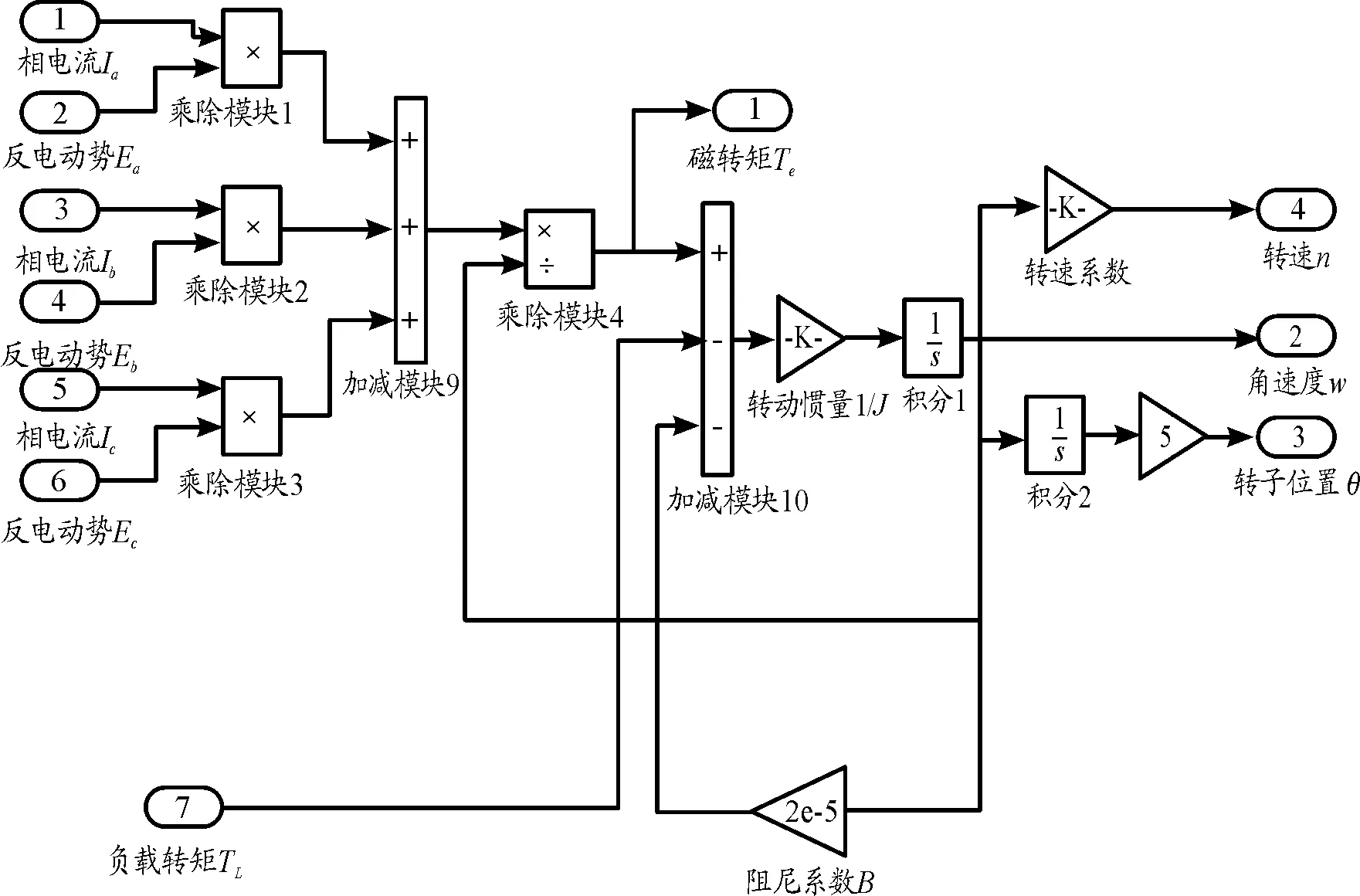
圖3 轉矩模塊示意圖
2.3 電流滯環控制器模塊
為了實現對實際電流的跟蹤控制,提高系統的性能,電流環采用電流滯環的控制方法。電流滯環的輸入為三相電機的實際電流和參考電流,參考電流可由PID調解的電流幅值信號和電機轉子位置信號的邏輯關系決定[6],邏輯關系通過模塊難以進行塔建,通過S函數的書寫來進行實現。電流滯環的基本原理是通過改變實際電流與參考電流之間變化的滯環寬度,輸出脈寬不同的PWM控制信號,來控制逆變器的通斷時間來調整電機的速度變化。電流滯環控制控制模塊及其參考電流的S函數產生部分如圖4所示。
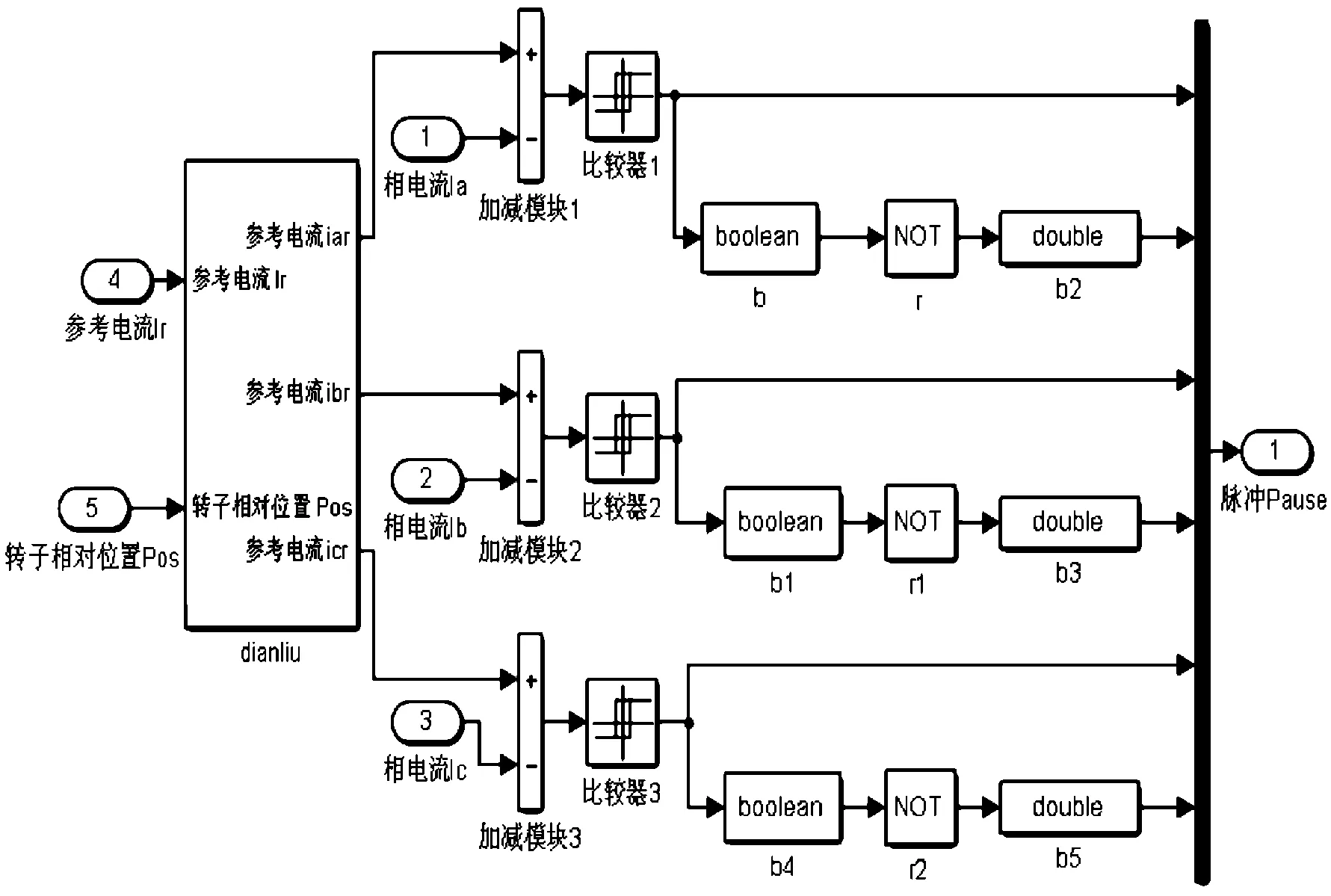
圖4 電流滯環控制模塊示意圖
2.4 相位環和速度環的控制模塊
位置環和速度環作為本系統的重要控制環節,使其能夠實現對反旋翼筒的位置快速跟隨響應的控制,本系統采用積分分離式的PID控制方法。本系統選擇積分分離式PID控制器,由于雙電機在轉動過程中,彈載計算機不斷發出電機加減速指令,短時間里經典PID控制的電機輸出會造成運算的積分積累,引起系統的較大超調。而積分分離式PID控制器,在被控值與參考值之間的偏差較大時,取消積分作用[7-10],避免由于積分作用給系統帶來的不穩定性和較大超調量;當被控量接近參考值時,引入積分控制,從而消除靜態誤差,提高控制精度。控制模塊如圖5所示。
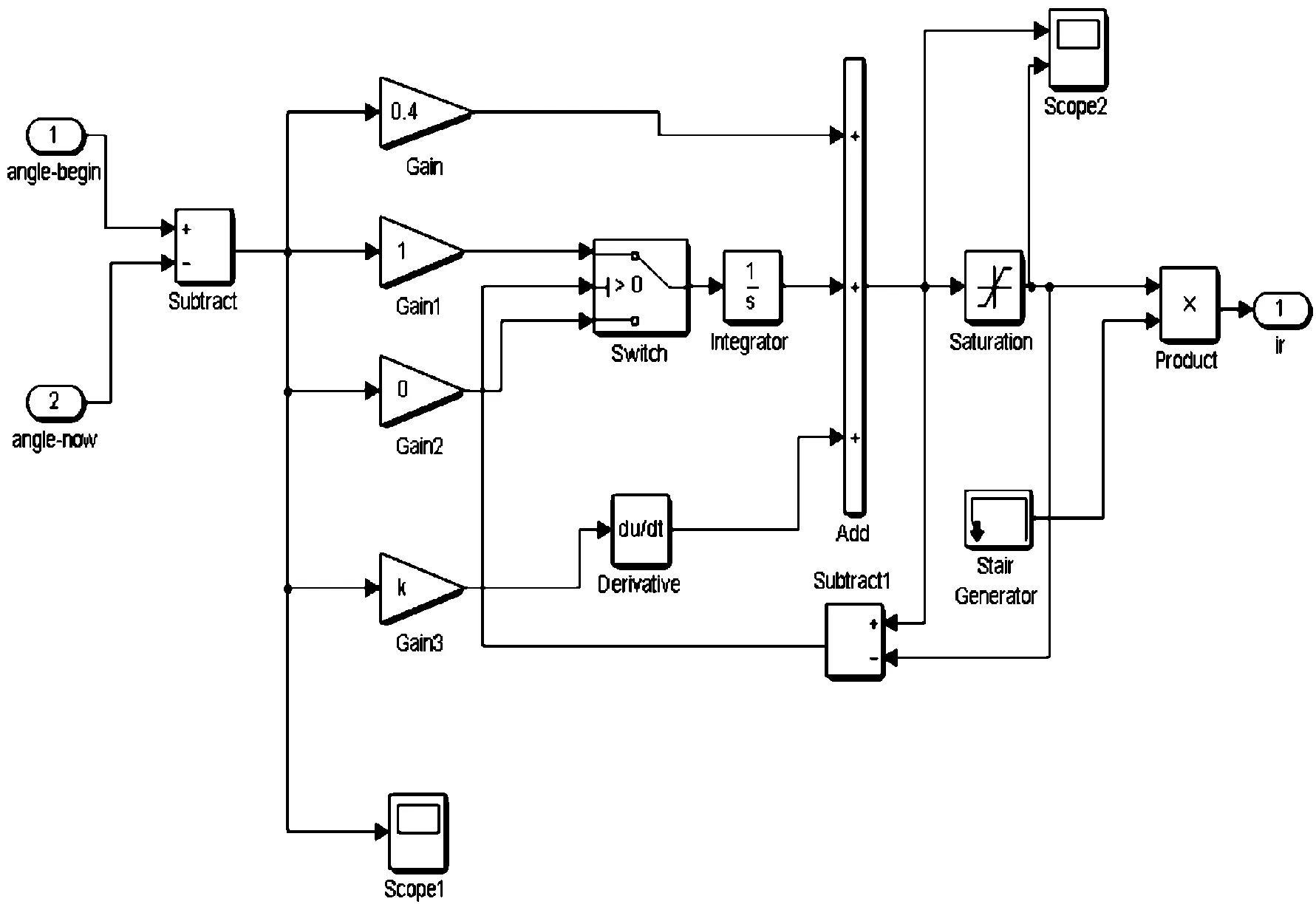
圖5 PID控制模塊示意圖
2.5 反旋翼筒偏角計算
對于反旋翼筒的偏角計算的前提是云臺轉速的穩定運行,反旋翼筒對彈體與云臺轉速之和的穩定跟隨,使其起始的偏角角度為0°。在此模塊計算上,當系統中云臺和彈體速度穩定后,在穩定的某一時間段內,反旋翼筒旋轉過的角度減去云臺旋轉的角度及彈體旋轉的角度,得到的結果就是反旋翼筒的偏角角度[11-14],偏角計算公式如下:
θ偏=θ翼-θ彈-θ云
(8)
在實際計算模塊中,根據現有數據彈體轉速n彈(r/s)云臺轉速n云(r/s)反旋翼筒轉速n翼(r/s),運用積分的方法在(t1~t2)時間段內來對反旋翼筒的偏角進行計算:

(9)
根據上述的數學方程式對其建立相應的翼筒偏角計算模塊,如圖6所示。
2.6 反旋翼筒總體仿真
反旋翼筒總體仿真模型如圖7所示。
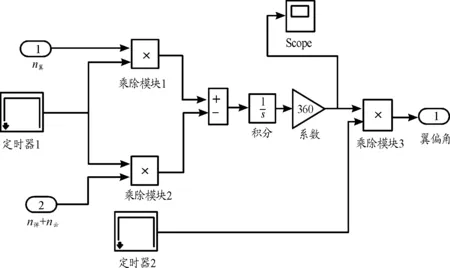
圖6 翼筒偏角計算模塊示意圖
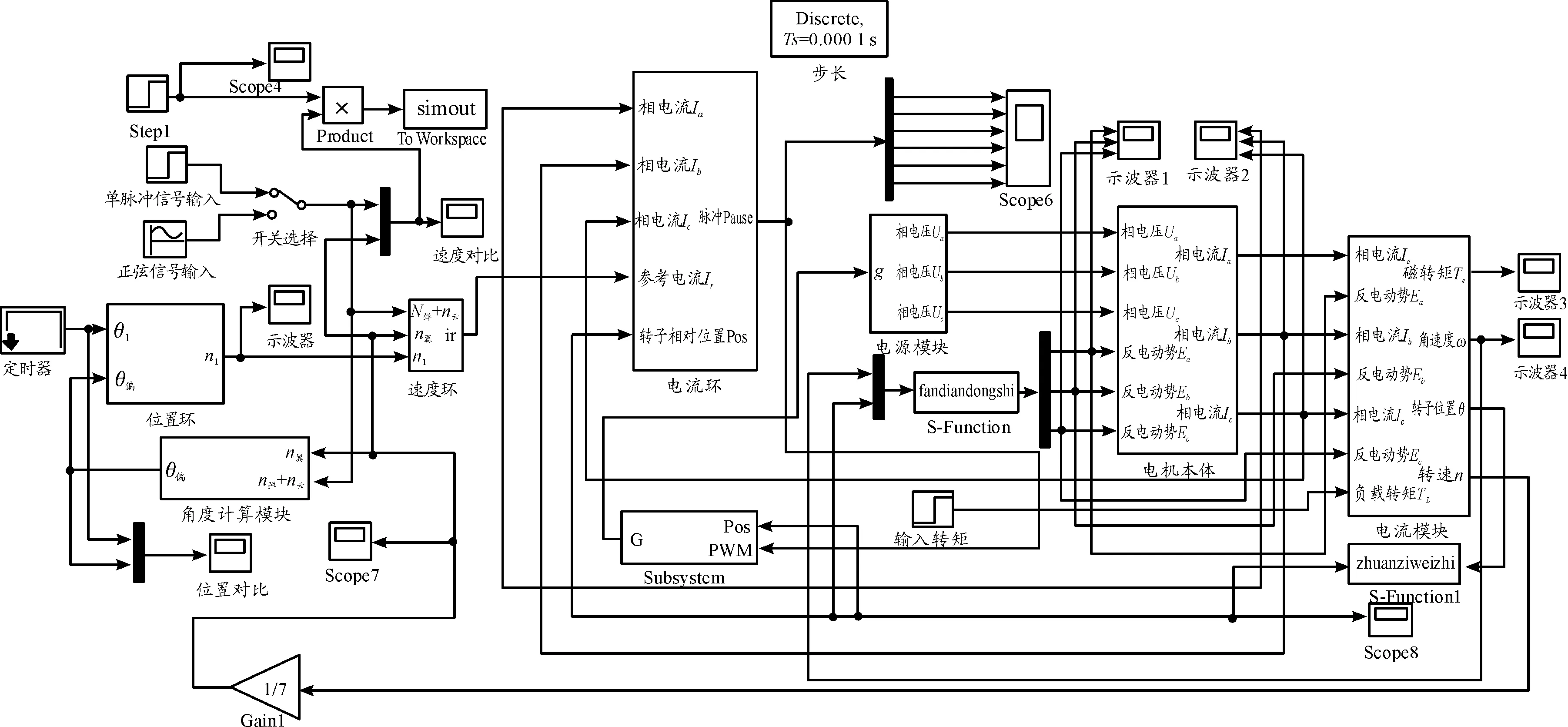
圖7 整體仿真模塊示意圖
3 反旋翼筒控制系統仿真結果分析
本系統對反旋翼筒控制系統對相位進行準確控制,其根本還是對一個專用無刷直流電機的穩定控制。電機參數如下:額定電壓U=12 V;極對數為2;電機額定轉速n=50 r/s;相間繞阻R=1 Ω;相間電感L-M=8×10-5H;阻尼比系數B=6.274×10-6(Nm·s/rad);轉動慣量J=0.005 kg·m2;反電動勢系數為Ke=0.009 V/rps。彈體在飛行過程中,主要分為反旋翼筒的轉速跟隨階段和翼筒角度調整,這兩個過程的變化是精確控制的前提。
3.1 慣性空間下翼筒的轉速跟隨
在彈體轉速超出反旋翼筒轉速范圍時,給予定云臺一定的轉速指令,使反旋翼筒可以進行其轉速范圍,待云臺轉速穩定后反旋翼筒相對彈體進行反旋,反旋速度和云臺及彈體的速度矢量和保持穩定一致,從而實現在慣性空間下保持靜止,這一狀態本文稱其為滑翔狀態。此狀態下假設彈體轉速為3 r/s,云臺轉速為10 r/s(相對彈體正向旋轉),反旋翼筒相對實現反向的13 r/s轉速跟隨。在這個過程中暫時關閉位置環控制,因為位置的精確控制是在轉速跟隨的良好性能上的基礎上,從仿真結果上可以看出,在整個系統響應過程中在工作 5 ms內可以達到額定轉速,達到翼筒響應時間要求,在系統靜態響應過程中系統誤差控制在+0.1~-0.1 r/s內,具有良好的穩定性符合系統對反旋翼筒的性能要求。轉速跟隨仿真曲線圖8所示。
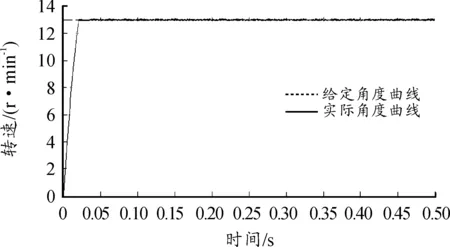
圖8 翼筒滑翔時速度跟隨仿真曲線
3.2 反旋翼筒角度跟隨仿真
當彈體以3 r/s的速度進行正旋時,云臺相對彈體以10 r/s的速度也正向旋轉,此時反旋翼筒相對于彈體或云臺(云臺相對彈體正相旋轉時)進行13 r/s時反向旋轉,在慣性空間下保持靜止,將某一指定位置設定為0°。在慣性空間下進行起始角度標定后,在t=0.2 s時,假設彈載計算機給定翼筒偏轉+40°指令,在t=0.3 s,給定-40°的翼筒偏轉指令。角度跟隨仿真曲線如圖9所示。
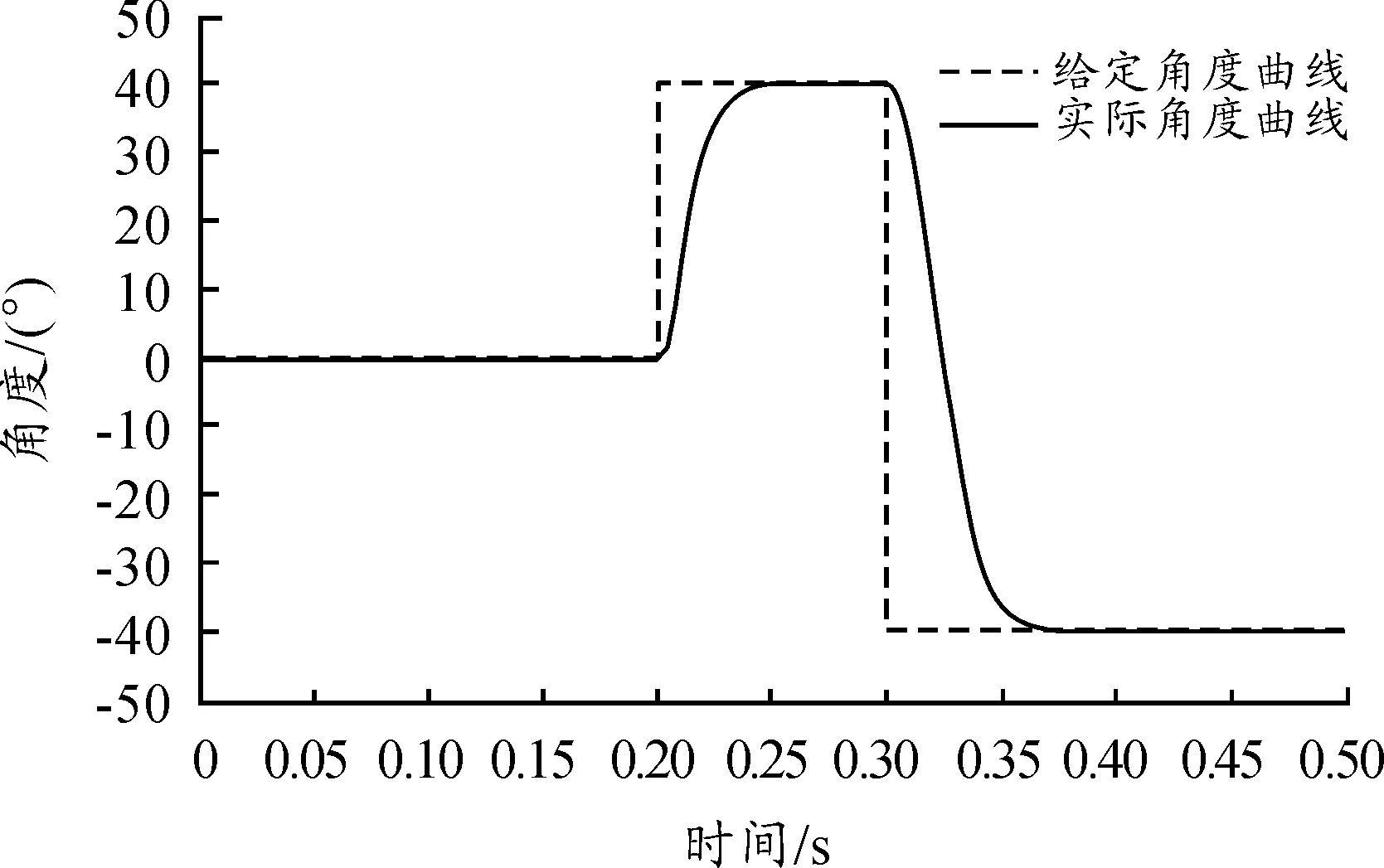
圖9 翼筒角度跟隨仿真曲線
在圖9翼筒角度跟隨仿真曲線中,虛線為翼偏轉角度給定曲線,實線為反旋翼筒實際響應角度曲線,翼筒在從0°偏轉到+30°,響應時間在50 ms內超調較小,穩定時誤差不超過0.1°。系統整個隨動過程中反應時間短,動靜態特性良好,控制精度高。符合項目控制要求。
3.3 系統動態性能仿真
由于不同的彈在空中飛行過程中轉速不同,云臺式PGK可以適用多種不同型號的彈體,這就要求翼筒在轉速跟隨時動性較好。假設彈體和云臺的轉速和以1.5 Hz頻率的正弦規律在8~12 r/s的轉速范圍內變化,圖10、圖11為根據此狀態對系統的性能進行仿真研究得到的曲線。
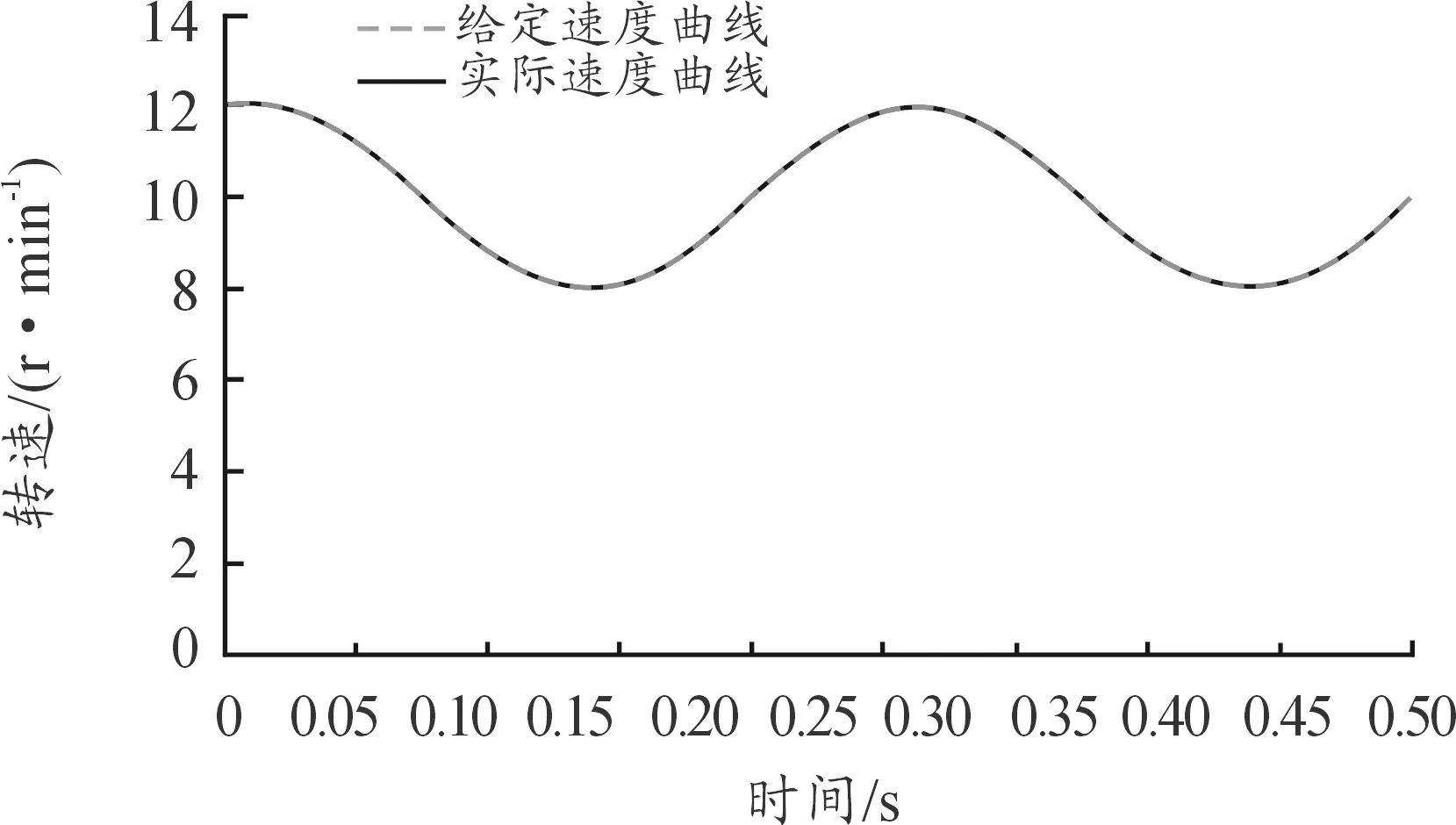
圖10 正弦速度信號翼筒響應圖曲線

圖11 正弦速度信號翼筒響應曲線局部放大圖
其中圖10為速度是正弦信號輸入時翼筒的整個響應曲線圖,圖11為速度是正弦信號輸入時翼筒的跟隨曲線局部放大圖。由圖10和圖11可以看出反旋翼筒有著良好的速度跟隨能力,穩定性好,精度高,在整個跟隨過程中誤差保持在(-0.01,+0.01)r/s內。從動態仿真圖可能得出結論,基于云臺式PGK的反旋翼筒控制系統的動態特性及穩態特性較好,符合系統的要求。
4 結論
1) 設計了一種可對不同彈體轉速進行自適應的云臺PGK反旋翼筒的控制系統。
2) 云臺式PGK反旋翼筒控制系統可對不同彈體轉速進行自適應,且系統具有良好的魯棒性,有良好的動態特性和靜態特性,控制精度高,響應速度快等特點。驗證了此方案在不同彈體轉速應用上具有可靠性。