用于多機器人的BML人機交互框架設計與實現
2020-01-14 10:28:38韓冰心曾志文肖軍浩盧惠民雷思清
小型微型計算機系統 2019年12期
李 筱,韓冰心,曾志文,肖軍浩,盧惠民,雷思清
1(國防科技大學 智能科學學院, 長沙 410073)2(92665部隊, 湖南 張家界 427200)
1 引 言
指揮和控制多機器人系統是一項非常有挑戰性的任務.主要面臨的問題是,隨著機器人的增加,以及異構性復雜度的增加,系統模型復雜度急劇上升[1].系統模型復雜度的增加,會讓計算量增加,交互信息膨脹.每增加一臺機器人,都要頻繁修改通信協議以及相關決策,才能保證正常地指揮和控制多機器人系統.
在多機器人協同控制方面,研究人員已經開展了大量的工作,Alami[2]等人提出了分布式規劃的一般方法,以分布式的方式逐步合并計劃;Balch和Arkin[3]開發了在不同條件下維持不同類型的編隊(線形,楔形等)的框架.他們展示了編隊行為如何能夠可靠地形成、保持并在編隊之間平穩切換.文獻[4,5]在控制理論框架中研究了隊形維護,特別是機器人在限制通信的情況下,維護隊形的穩定性.Parker[6]提出了ALLIANCE架構,能夠處理編隊維護以及其他多機器人任務.Jennings[7]等人開發出一種基于Scheme語言的用于多機器人協調的分布式執行程序.文獻[8]側重于多智能體系統的監督控制,采用基于行為的控制方法:預定義一組基本行為,指揮者選擇其中一個智能體,但是這種方法在面對一個更大的智能體群體,更復雜或更多的行為時是不適用的.這種方式不具備可擴展性,并且行為的增加會給指揮者帶來負擔.Wilson[9]等人認為更先進的方法是基于策略的控制方法,全局約束由指揮者以受控的自然語言給出,并且相應的動作由智能體自主執行.Goldman[10]和Simons[11]考慮了一種類似劇本的方法,其中一組參數化的策略是機器人已知的,而指揮者的行為就類似于一個足球教練,他有一本預定戰術的書,每個球員都知道相應的戰術,指揮者只需要輸入指定戰術即可.文獻[12]中為解決機器人智能的局限性以及誤指揮的問題,提出了一種實現人機智能結合的方法,它可以進行一定程度的推理,從而對錯誤命令進行糾正.文獻[13]提出一種換位思考的方法,得到機器人的信息之后,用統計學的方法計算出機器人的行為模式,根據相應的行為模式采取對應的策略.
美國陸軍開發了C2(Command and Control)系統用于美國陸軍實體級仿真系統[14].他們在實際使用中發現一些缺陷,因為C2通信是數據密集型的,最關鍵的C2信息——指揮官的意圖和命令并沒有作為數據通信,而是作為一種“自由文本”或者獨立文件進行通信.雖然這樣的方式適合人與人之間的交流,但是不適合用于仿真系統或者機器人系統.BML(Battle Management Language)是作為這個問題的解決方案而開發的.BML廣義的被定義為:一種無歧義的語言,能夠做到:1、指揮和控制進行軍事行動的部隊和裝備.2、提供共同情景感知和共同作戰目標.
文獻[15]中Thomas Remmersmann等人在2010年設計了一個真實機器人執行BML命令的控制系統,提出了BML任務的分解和規劃系統.Marco Langerwisch[16]等人基于Robot Operating System(ROS)開發了基于BML命令的控制系統用于無人機和無人車上,在異構的集群中,無人機與無人車通過BML進行信息的共享,完成了相應的任務.他們系統的架構和Thomas Remmersmann等人的基本類似,在從高層系統分發BML指令的時候用基于ROS開發的BMLConnector將ROS與BML結合起來.
現有的工作必須預先設定好群體內具有哪些機器人,不能夠動態地讓機器人加入以及退出群體.并且控制命令較為繁瑣,容易增加指揮者的指揮負擔.本文所提出的BML框架可以有效解決上述問題,首先它可以通過構建角色樹和詞匯樹,支持機器人動態地加入或者退出機器人群體,通過搜索角色樹可以知道每個機器人的能力.另外,本文提出的BML框架可以允許指揮者輸入詞匯受限的自然語言,通過詞匯樹和相應的語法規則,將輸入的自然語言轉化為標準的BML命令,能夠極大地減輕指揮者的指揮負擔.
本文的后續章節安排如下:第2章介紹BML的概念和特點.第3章介紹本文提出的基于BML的人機交互框架,框架的工作原理以及流程.第4章主要通過三組實驗來驗證BML人機交互框架的優勢和有效性.
2 BML(Battle Management Language)
BML是一種上下文無關語言,是基于Standard Generalized Markup Language(SGML)語言的擴展,它可以無歧義地表達指揮者的意圖,也可以提供共同的作戰態勢和局勢.通過對5W(Who,When,What,Where,Why)的描述,來表達任務具體信息.
BML的設計目標是:1)一種無歧義的命令;2)一種將機器人模塊化的協議.針對這兩個目標,首先解決歧義的問題,選取上下文無關的語法,規定其產生式,就能從語法上消歧.在 BML 的語法層面上,文獻[17]中 Thomas Remmersmann 和 Alexander Tiderko 等人認為 BML 必須明確無歧義,為了明確無誤,BML 必須被設計成為一種形式語言,形式語言是由形式語法生成句子的集合[18].在 BML 中,該語法是命令和控制詞匯語法[19],并且包含 5W(Who,What,Where,When,Why)的概念.核心語法規則是將任務分配給單元.這些規則集中表達在 What 上,在構建任務的時候,需要包含至少一個What.Who表示任務分配對象和執行者,Where和When表示任務的空間和時間約束.文獻[20]中,Ulrich Schade 等人對 BML 的語法進行了進一步的討論,他們認為 BML 語法應該是:1)、上下文無關的;2)、它的詞匯術語應該取自于 Joint Consultation,Command and Control Information Exchange Data Model(JC3IEDM)[20];3)、它的非終結符應該表示語義角色;4)、應該可以修復成分的順序,使得子句在語義上消歧.
為實現機器人模塊化,像搭積木一樣將單個機器人組合成一個群體.本文提出一種 BML 框架,通過統一協議,限定詞匯等方法,讓每個機器人對應一些特定的詞匯和標記.通過這種方式,可以將機器人模塊化,指揮者只需要知道機器人對應的詞匯就可以指揮機器人.同時,只需要在字典中加入和刪除相應的詞匯,就可以從系統中添加和刪除機器人.
2.1 BML的特點
用BML來指揮異構的機器人群體,需要能夠充分發揮異構機器人的能力,也需要方便地使得不同種類的機器人能夠快速的加入群體和從群體中分離.除此之外,在某些必要的場景,需要用語音或者手勢等方式來控制機器人群體.為了滿足上述需求,BML需要具備以下特性:1、可以發布無歧義的指令2、BML命令可以根據需求擴展,具備可擴展性3、是用于人機交互的一種標準指令格式4、支持多通道的輸入5、方便人去控制指揮機器人
2.2 BML的命令格式
為了讓BML命令有較強的表達力,所有的指令都通過5W表達出來.為了使得命令盡量簡單,Who對應命令執行者,What對應命令關鍵詞,如圖1所示.
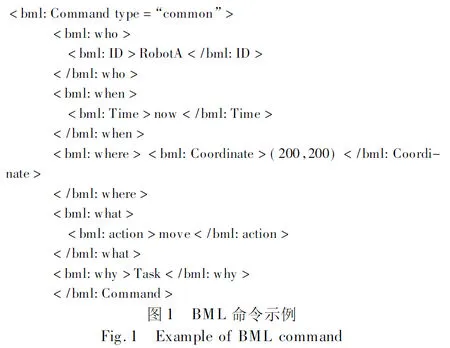
圖1中展示了一條讓機器人A移動到坐標(200,200)的命令.其中,除了5W是固有的標記之外,其它的標記比如ID,Coordinate等,都是根據實際情況擴展的.每條標記都對應著相應的詞匯集合,只有標記在詞匯集合中,這條BML命令才是一條有效的命令.
3 基于BML的人機交互框架
3.1 BML交互框架簡介
本節提出一種人機交互框架,在定義BML為上下文無關語言基礎之上,基于開源的ROS(Robot operating system)框架開發,完成人機交互功能.該框架可以表達指揮者的抽象意圖,允許指揮者發出動作級和任務級的指令.BML交互框架應用于多機器人系統中,其目的是為了讓單個指揮者可以很方便地指揮和控制整個多機器人系統,讓指揮者免于處理單個機器人的行動細節.
BML交互框架采取了分層模型,從上往下為輸入層,接口層和行為層.輸入層接收來自GUI的指令,接口層負責將GUI中的輸入轉化成相應的命令,行為層收到接口層發送過來的命令,將命令轉化為機器人的實際行動.通過這種分層的模型,可以很方便地增加和減少機器人,即只需要在接口層中動態地改變相應的接口命令即可.本框架的GUI為一個名為Coach的節點,在第四節將介紹Coach.
BML交互框架如圖2所示,圖中兩個共享數據庫為同一個數據庫.
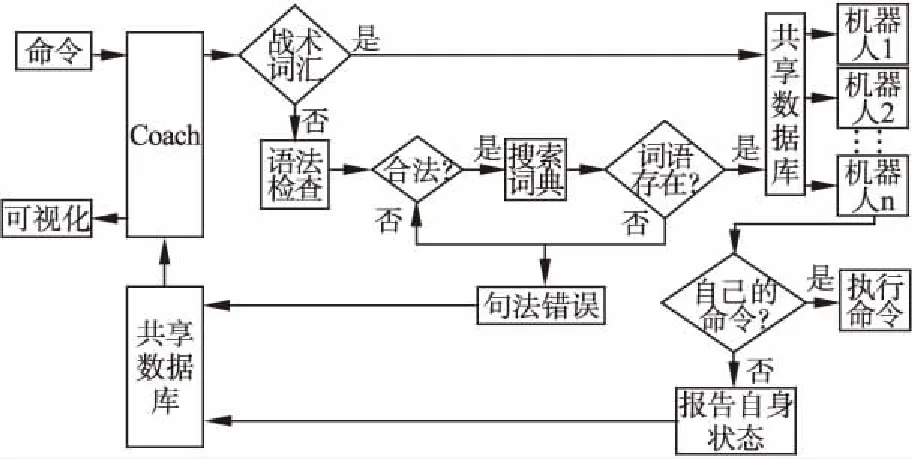
圖2 BML交互框架圖Fig.2 BML interactive framework
指揮者與機器人之間通過Coach連接起來,通過Coach輸入命令,再將命令轉化為標準的BML命令格式.標準BML命令中具有5W元素,再將命令進行分解,將高級命令轉化為機器人能夠執行的指令.
考慮到多機器人系統中機器人是分布式控制的,在接口層中定義了一個共享數據庫.在某些情況動態改變了某些詞語或者增加,刪除了機器人,集群內的其他機器人也能夠知曉.某些命令可能需要機器人之間相互配合,如果不能正確的知道自身集群內機器人情況,可能會造成任務失敗.當機器人執行完任務之后,會將自己的視覺、里程計等感知信息發送給接口層,接口層將感知信息聚合成標準的BML格式,作為報告返回.Coach接收到相應的報告后展示給指揮者反饋命令執行情況.
為了能充分的使用框架,機器人需要具備一定的自主能力,可以是由信息驅動的半自主機器人,本身具備一定的能力完成復雜的任務.指揮者在下達命令的時候,根據指令需求以及機器人自身情況,進行任務分配.
3.2 BML框架三要素
BML框架是一種指揮多機器人系統的通用框架,適用于不同的機器人系統,可以方便地讓機器人從群體中快速接入與分離.為了達到這一目標,BML框架中使用了BML標記,詞匯樹與角色樹,這三者構成了BML框架的三要素.
三要素都存在共享數據庫中,所有機器人都共同使用著同一份數據庫的數據.這個數據庫是實時更新的,發布的指令與機器人傳感信息的返回都是通過這個共享數據庫進行數據通信,其數據交互模型如圖3所示.
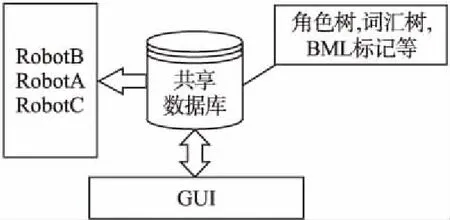
圖3 數據交互模型Fig.3 Data model of BML framework
3.2.1 BML標記
BML標記分為兩種,一種是核心標記,Who、When、What、Where、Why,另一種是自定義標記,是根據任務情況,動態添加的.其中,每個自定義標記都會被納入到詞典當中,詞典中的每個詞語都有相應的標記.在解析命令的時候,通過詞典的標記與詞語的對應關系,將BML解析成相應的命令.
3.2.2 詞匯樹
詞匯樹包含了兩種詞匯,戰術詞匯和動作詞匯.其中戰術詞匯是根據具體任務確定的高級命令,是由動作詞匯組合而成的.動作詞匯包含機器人基本的動作,比如移動,避障等行為.當一個命令下達,通過搜索詞匯樹,來判斷命令為高級命令還是低級命令,如果是低級命令則直接執行,高級命令則進行分解.
BML標準命令中,包含了5W.為了方便解析命令,框架定義Who為任務的執行者,在角色樹中可以找到Who.When為執行時間,除了立即執行與定時執行之外,還能循環執行任務,例如巡邏任務,需要循環執行.Where表示任務執行者的目的地,要實現這個功能需要機器人具備全局定位能力,否則機器人無法知道自身與目的地之間的相對位置關系.Where可以用固定的坐標表示出來,也可以使用動態目標位置,當使用動態位置的時候,機器人需要對目標的位置進行估計,在進行追蹤任務時,還需要保持固定的距離.What本應該用來描述任務,但是考慮到是人機交互,直接用來作為戰術詞匯或者動作詞匯的載體.
3.2.3 角色樹

圖4 角色樹Fig.4 Role tree
為了讓機器人能夠快速加入集群與從集群中分離,框架定義了角色樹來實現這個功能.角色樹如圖4所示.
角色樹與詞匯樹非常相似,其中,每個角色都通過動作詞匯描述 出來.當一條命令下達后,在任務分配階段,通過搜索角色樹,確定哪些機器人具備能力完成相應任務,完成任務的分配.加入新機器人時,在root節點中加入以角色名字為根節點,動作詞匯為子節點的子樹.將角色樹同步到共享數據庫中,并且在共享數據庫中開辟一塊空間,用來給新機器人與群體進行信息交互,這樣新機器人就接入到機器人群體當中了.刪除角色時,在角色樹中,找到角色名字的節點,進行尾遞歸刪除,并且將共享數據庫中相應內存釋放掉.在實際框架中,上述操作只需要在GUI中進行簡單的操作即可完成.
角色樹中角色名的根節點除了作為數據之外還可以表達當前角色的狀態.當機器人處于任務狀態時,可以在當前節點查詢到,這樣在任務分配時就能避免出現沖突.
3.3 工作流程
BML交互框架是一種通用的人機框架,允許指揮者在抽象層次上表達自己的意圖.在人機交互中,很自然的想法是用自然語言去控制機器人.本文在所提出的BML交互框架中實現了這種想法.
命令以自然語言的形式輸入,通過中文自然語言處理,將句子進行分詞,再進行語義角色標注.其中,關鍵詞為who,when,where和what.對應于語義角色中的主語,時間狀語,地點狀語和謂語.在數據庫內有一個總詞典,經過第一次分詞之后,再根據總詞典進行強制分詞,保證一些自造詞不會被分錯.通過這種方式讓一段自然語言轉化成為對應5W的標準BML命令.
在執行命令的流程中,BML交互框架會搜索角色樹.根據角色的能力以及狀態對角色分配任務,如果任務分配失敗,則會將結果報告給GUI讓指揮者知曉.
BML交互框架的工作特點如下:
1)根據特定任務目標,選取戰術詞匯,戰術詞匯為高級命令,如跟隨、巡邏、防守等命令.
2)根據戰術詞匯,選取基本的動作詞匯,動作詞匯為低級命令,比如移動、轉向等命令.
3)機器人的加入以who為根節點,動作詞匯為子節點的樹加入角色樹中,然后同步數據庫.
4)機器人的刪除以who為根節點,進行尾遞歸刪除,然后同步數據庫.
4 實 驗
4.1 實驗背景介紹
本節將BML框架應用在實際機器人人機交互中.由于BML框架由本文首次提出,在國內外沒有類似的方法去指揮和控制機器人,因此本文重點測試和分析所提出BML框架的使用效果.通過在仿真平臺實驗,驗證其可行性;通過動態增加和刪除機器人實驗,證明其通用性;通過對機器人群體發送任務級命令,證明其便利性;最后,通過實物機器人人機交互實驗,驗證本文提出的框架的實用性.
擬使用RoboCup中型組為應用背景開展實驗.設計針對足球比賽的戰術詞匯與動作詞匯,讓詞匯盡量全面的覆蓋球場上的所有情況.根據戰術詞匯與動作詞匯,建立詞匯樹與角色樹.使用簡單的上下文無關語法產生式,輸入無歧義的上下文無關語言作為指揮者的控制命令.對于多機器人的指揮在RoboCup中型組機器人足球比賽中有著很好的體現,由于RoboCup中型組由兩種機器人組成——常規球員、守門員,并且常規球員和守門員的能力不同,可以認為這是一個異構的機器人群體.所有球員都具備全局定位,足球識別,以及共享隊友位置信息等能力.常規球員擁有帶球、傳球和射門的能力,守門員有張開雙臂防守射門的能力.
在RoboCup中,除了常規球員之外,每個球隊還需要一個Coach.負責給場上球員下達相關命令以保證比賽正常進行.Coach界面如圖5所示.
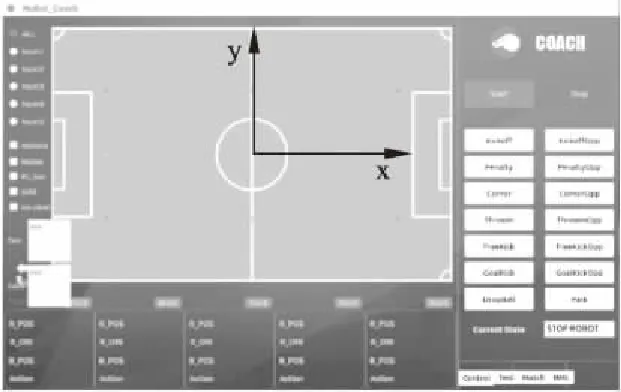
圖5 Coach界面Fig.5 Coach interface
其中球場坐標系定義與常見笛卡爾坐標系相同,原點在球場中心,定義x正方向為進攻方向.在本實驗中,假設進攻方向都朝右.仿真平臺[21,22]為Gazebo,由于Gazebo中機器人位置信息都可以通過Coach顯示出來,為方便展示實驗效果,本文都使用Coach界面來展示實驗效果.
在本實驗中,定義了動作詞匯如移動、抓球、射門等命令,定義了戰術詞匯如傳球、任意球、比賽開始、比賽結束等命令.
4.2 單機器人的控制
本文所提出的BML框架具備控制單個機器人的能力與語法檢查的能力.單個的足球機器人具備移動、抓球、射門等能力.在多機器人系統的指揮和控制中,首先要實現針對單個機器人的控制.本文提出的BML人機交互框架也具備該細粒度的控制能力.在仿真環境中,針對單個機器人發出移動、抓球和射門等動作級指令,讓機器人完成相應的動作.仿真環境中,有一號到五號機器人,其中一號是守門員,二號到五號是常規球員.
單機器人控制的命令符合上下文無關語法,格式為 SVO,其中S為主語,表示命令執行者,V表示動詞,O表示動作對象與目的.如:①指令“二號去原點”是一條合法指令,其中二號為主語S,去是動詞V,原點表示動作目的O.②指令“二號去”不是一條合法指令,句子成分中沒有表示動作目的的O.在Coach中輸入錯誤的指令會返回命令不合法的錯誤,如圖6(a)所示.
除了語法上需要合法之外,還需要機器人與動作指令都在相應的角色樹與詞匯樹中.如:“六號去原點”不是一條合法指令,因為在角色樹中并沒有六號機器人,所以在解析命令合法性的時候同樣也會返回命令不合法的錯誤,如圖6(b)所示.
1https://www.trustie.net/org_document_comments/6568?organization_id=23
圖6(c)中Coach發出的命令為二號去原點.在球場坐標系中,原點為球場中點,二號機器人接收到命令后移動到了球場中點.
當命令通過語法檢查,并且能夠在角色樹和詞匯樹中找到相應的機器人和動作指令時,Coach就會發送命令.發送命令是將句子分解成S、V、O三個部分,一起發送到共享數據庫中.所有機器人都接收共享數據庫中的數據,當自身ID和共享數據庫中當前命令中包含的ID相同,那么當前機器人就會根據命令執行相應的動作.

圖6 合法和非法命令的展示Fig.6 Example of legal and illegal orders
4.3 動態增加和刪除機器人
本文所提出的BML框架具備通用性.為驗證其通用性,本實驗中,先讓二號機器人完成移動功能,然后再將二號機器人刪除.Coach中失去相應機器人的信息,機器人無法在Coach中顯示,并且由于機器人不在角色樹中,傳球命令也不合法.當重新加入機器人后,Coach中重新顯示機器人,發送命令也可以正常響應,如圖7所示.圖7(a)與圖7(b)中顯示的是刪除二號機器人前后的對比.當二號機器人刪除后,Coach中無法顯示.當重新將二號機器人加入后,Coach中重新顯示出二號機器人.并且發送命令“二號去前點”,二號成功響應,如圖7(c)中所示.前點是一個自造詞匯,代表坐標(500,0).

圖7 動態添加和刪除機器人Fig.7 Dynamically add and remove robots
本文提出的BML人機交互框架可以動態地從群體中增加和刪除機器人.框架中使用的共享數據庫可以動態地申請內存空間,并且實時監聽某一端口的數據.當數據庫中增加一臺機器人以及相應的描述,共享數據庫根據描述動態申請空間.當共享數據庫申請對應機器人的空間成功,即機器人加入群體成功.共享數據庫中有所有機器人的描述,即所有機器人天然知道所有機器人的消息,但是只對與自己相關的命令進行處理.
本文所提出的BML人機交互框架是基于信息的框架,其中信息由BML描述,這樣機器人只需要處理由BML規定的信息即可.只要機器人符合所規定的BML規范,就可以很方便地加入機器人群體或者從群體中刪除.
4.4 機器人群體完成任務級命令
本文所提出的BML框架具有便利性,面對一個龐大的機器人群體,指揮者常常面臨著高強度的指揮負擔.在機器人自身具備一定智能的情況下,使用任務級的命令指揮機器人或者機器人群體,會使得指揮者負擔大大降低.
本文提出的BML人機交互框架中的詞匯樹中具有戰術詞匯,其中戰術詞匯為高級詞匯,需要機器人具備多種能力才能夠執行.當Coach接收到戰術詞匯時,將戰術詞匯發送到共享數據庫中,機器人接收到命令后搜索角色樹與行為樹,如果自身符合條件即接受命令.每條戰術詞匯都會指定機器人數量,比如傳球,需要兩臺機器人.當接受命令的機器人達到指定機器人數量時,即可執行相應命令,完成指定任務,如圖8所示.

圖8 任務級命令“任意球”Fig.8 Tactical vocabulary-free kick
當發出任務級命令“任意球”后,機器人準備開出任意球,其中三號作為傳球者,四號和三號作為進攻者,二號為防守者.即一條任務級的命令讓場上四臺機器人同時行動起來,完成相應的任務.除了在仿真系統中完成上述實驗驗證外,本文還在實物機器人上開展了實驗研究,證明了所提出的人機交互框架的實用性.具體視頻參見鏈接1.
4.5 對比實驗
本文針對所提出的基于BML的多機器人交互控制方法和傳統的機器人遙控方法開展實驗對比分析.主要對比二者從命令發出到完成相同任務所需要的時間.所對比的項目為單機器人的移動和抓球,以及多機器人傳接球配合.第一個實驗為機器人的定點移動,從球場坐標系的(0,0)移動到(0,500),重復移動6次.第二個實驗為機器人的定點抓球,機器人初始位置為(0,0),面朝x軸正方向,足球擺放在以(0,0)為圓心,半徑為5m的半圓弧上,以π/6的弧度為間隔,重復抓球6次.第三個實驗為機器人的傳接球配合實驗,兩臺機器人分別在(0,0)和(0,500),足球放在兩臺機器人正中間,即(0,250)處.由(0,0)處的機器人先抓球然后帶球移動回(0,0)再傳球,當另一臺機器人抓住球后視為一次傳接球配合完成,該配合重復執行6次.在分別使用本文提出的方法控制機器人和使用傳統遙控方法控制機器人完成上述三個實驗任務的情況下,完成任務所需的平均時間如表1、表2和表3所示.

表1 機器人定點移動所需時間Table 1 Time required for the robot to move

表2 機器人定點抓球所需時間Table 2 Time required for the robot to catch the ball

表3 多機器人傳接球配合所需時間Table 3 Time required for the robot to pass the ball
通過上述三個實驗對比,可以看出來,對單機器人的簡單控制,使用傳統遙控方法耗時較少,但是隨著控制的復雜度增加,尤其是當涉及到多機器人系統的交互控制時,傳統的方法時間效率上明顯低于本文所提出的方法.在傳接球配合實驗中,傳統方法所消耗的時間幾乎是本文方法的兩倍.
本文所提出的方法將更多的時間花費在解析指令上,當機器人開始響應后,所花費時間與傳統單機器人控制方法相差無幾.綜上所述,本文所提出的方法對于多機器人交互指揮控制,相較傳統方法具有明顯優勢,隨著控制復雜度的增加,本文方法的優勢還會更加明顯.
5 結論與展望
本文首次提出了基于BML的人機交互框架,并且以足球機器人比賽為應用場景,定義了相應的戰術詞匯與動作詞匯,完成了單機器人控制、機器人從群體中分離與加入、多機器人指揮控制等任務.為了讓人機交互更加自然,基于BML創建相應的上下文無關語法,用更加貼近人類自然的表達方式來指揮和控制多機器人.實驗結果表明本文提出的基于BML的人機交互框架是一種具有通用性的框架,可以動態地在群體中增加和減少機器人,針對單個機器人可以實現動作級的指揮控制,針對多機器人可以實現任務級的指揮控制.
本文實驗中使用的機器人均為足球機器人,但是只要機器人符合相應的BML規范,使用相同的共享數據庫,使用本文提出的框架都能指揮控制.即本文所提出的控制框架可以對異構的機器人通用.
本文提出的基于BML的人機交互框架只使用了簡單的上下文無關語法,表達能力有限.針對此可以設計更為復雜的上下文無關語言,以擁有更強的表達能力.但是設計的語法太過于復雜,反而會造成指揮者的指揮負擔.如何設計一種語言能夠兼顧二者,也將成為人機交互的研究熱點之一.
猜你喜歡
中華胰腺病雜志(2021年1期)2021-02-26 11:28:36
山東醫藥(2020年34期)2020-12-09 01:22:24
中華胰腺病雜志(2019年4期)2019-08-29 08:52:20
小學生作文(低年級適用)(2018年3期)2018-04-17 00:58:35
少年博覽·小學低年級(2017年4期)2017-06-09 16:22:28
作文評點報·低幼版(2017年7期)2017-03-11 20:49:41
財經(2017年2期)2017-03-10 14:35:35
財經(2016年15期)2016-06-03 07:38:02
財經(2016年3期)2016-03-07 07:44:46
財經(2016年6期)2016-02-24 07:41:51
