10kg尾座式垂直起降固定翼無人機系統
2020-01-25 16:23:16雷志榮趙超秦瑋左玲
航空兵器 2020年6期
關鍵詞:無人機
雷志榮 趙超 秦瑋 左玲

摘 要:在分析目前國內外主流垂直起降固定翼無人機近況的基礎上,為解決復合翼類垂直起降無人機的固有缺點,設計了一種新型鴨式布局尾座式垂直起降固定翼無人機。該無人機將四旋翼和固定翼無人機相結合,通過優化無人機氣動方案、飛控系統選型、設計控制方案,尤其是在詳細研究了旋翼模式與固定翼模式相互轉換的控制方案后,完成無人機建模及控制律仿真并進行了科研試飛。試飛結果表明,本文提出的尾座式無人機在保留復合翼類無人機優點的同時,避開了其固有的缺點,可作為垂直起降類無人機的研究方向繼續深入研究。
關鍵詞:尾座式;垂直起降;鴨翼;模態轉換;飛行控制;無人機
中圖分類號:TJ765;V279
文獻標識碼:A
文章編號:1673-5048(2020)06-0043-06
0 引? 言
近年來,隨著無人機技術的發展,垂直起降固定翼無人機憑借自身的特點吸引了國內外眾多科研機構、商業公司進行深入的研究[1-7]。其融合了旋翼類無人機和傳統固定翼無人機的優點。旋翼模式下無需固定的起降場地,對飛行條件要求低,可實現垂直起降、穩定懸停,具有良好的低速飛行能力;固定翼模式下飛行速度快、航程遠、飛行包線較旋翼類無人機優勢明顯。基于以上特點,垂直起降固定翼無人機可部署在地理環境復雜,任務要求高的場景中,具有廣泛的應用前景。
目前常見的垂直起降固定翼無人機一般可分為推力換向式(Convertiplane)、嵌入升力風扇式(Fan-in-wing)和尾座式(Tail-sitter)。典型代表有:貝爾與波音直升機公司推力換向類的Eagle eye;西科斯基嵌入升力風扇類的 CypherⅡ;伯明翰大學和 MLB 公司的 V-bat 尾座式無人機。
近幾年,多旋翼類無人機因開源飛控的出現,且其機體結構簡單、成本低,異軍突起,已成為小型旋翼類無人機的主流,應用于管道巡線、噴灑農藥、航拍航測等多個領域。但多旋翼類無人機航時短,飛行速度低,屬于低、慢、小類飛行器。在此種條件下,嵌入升力風扇式無人機創新地將傳統的四旋翼系統與固定翼無人機相結合,逐漸發展為一類流行的垂直起降固定翼無人機——復合翼無人機[8-9]。與傳統的垂直起降固定翼無人機相比,復合翼無人機具有結構簡單,機體設計無特殊要求;四旋翼控制簡單,技術成熟,可靠性高;旋翼與固定翼模式轉換簡單,控制難度低等優點。
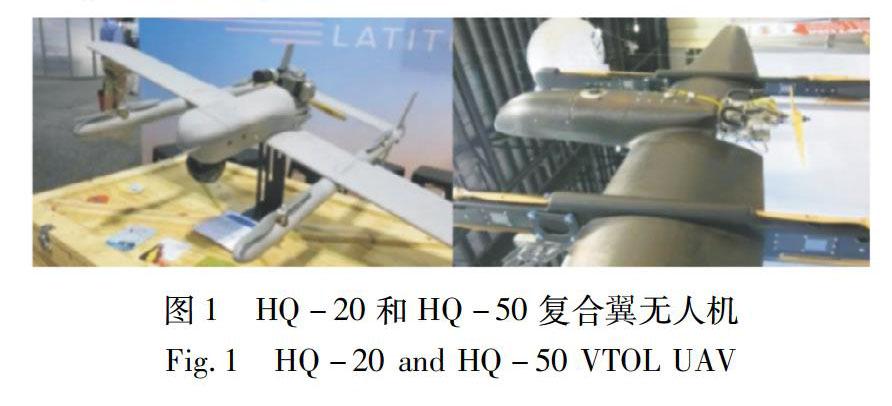
復合翼無人機在國內外得到快速發展。美國Latitude Engineering LLC公司是目前世界上復合四旋翼技術的領先者,已成功研制出多種復合翼無人機,如HQ-20,HQ-50等,如圖1所示。
國內的垂直起降固定翼無人機以復合翼無人機為主。隨著復合翼無人機的快速發展,復合翼無人機所帶來的缺點也越來越明顯。由于復合翼無人機是在固定翼飛機機體上直接加裝四旋翼系統,造成機身廢重大、增加飛行中阻力,廢重和阻力的增加進而會減少續航時間。
加裝四旋翼系統后,四旋翼系統惡化了無人機的重量特性,固定翼飛行階段會影響無人機的氣動性能,造成控制能力下降。如何減少上述復合翼無人機的缺點成為新型垂直起降無人機的關鍵指標。
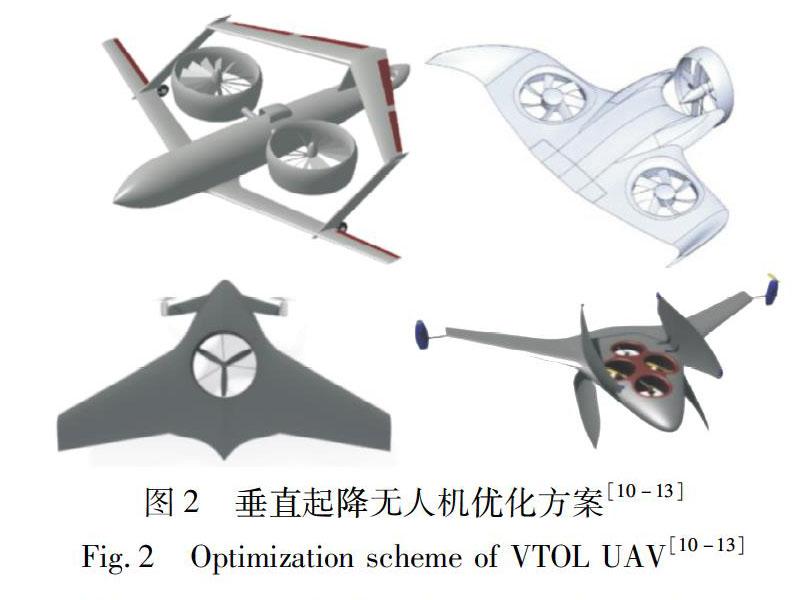
為了提高復合翼類垂直起降的性能,國內外研究人員提出新的氣動構型,如圖2所示。但目前未見有可實際使用的工程化產品。
尾座式無人機可作為一種有效方案,但其最大的缺點是飛行中控制難度大。借鑒復合翼無人機的思路,本文提出將尾座式無人機與四旋翼無人機相結合,設計一種新的尾座式無人機。與復合翼無人機相比,該方案的優點有:(1)結構件減少,純電動力飛行時可減少一套動力裝置,有效減少廢重,增加續航時間。(2)飛機結構基本無改變,氣動影響小;四個電機可智能工作,旋翼狀態時四個電機同時工作,固定翼模式下僅使用機翼兩個電機,另外兩個電機處于熱備份狀態,可根據需求,實時參與綜合控制。
為了增加俯仰軸的控制能力,機體考慮采用鴨式布局來提高控制效果。對于此種小型固定翼無人機,為增大無人機的升阻比,增加鴨翼控制面成為了一種理想的選擇[13]。采用鴨翼布局,可有效增加無人機的升力,增強了俯仰軸的控制能力,提高巡航速度、延長飛行時間。同時減少副翼舵面的使用,給橫滾通道留出了足夠的控制余量,大大增強了無人機空中受擾時的安全性。
尾座式無人機飛行時要經歷垂直起飛、轉平飛、固定翼飛行、拉起、著陸等不同的飛行階段。轉平飛和拉起是尾座式無人機特有的飛行階段。該階段無人機狀態變化較大,俯仰角可經歷90°的大姿態變化,氣動特性復雜,極大增加了控制律設計的復雜度[14]。而綜合四旋翼及鴨翼的尾座式垂直起降無人機,由于氣動性能的提高以及四旋翼出色的穩定控制能力,可有效減少控制律的設計難度,從而提高無人機系統的穩定性和安全性。
1 10 kg尾座式垂直起降固定翼無人機系統
通過選取無人機指標、初步設計無人機外形方案后,試制一款起飛重量10 kg純電動尾座式垂直起降固定翼無人機。該無人機具有軍民兩用、航時長的特點。其采用純電動力,操作簡單、背包式設計、輕便易攜,適合單人/單兵攜帶、環境適應能力強,可作為便攜式無人機的首選。
1.1 無人機平臺
無人機外形方案確定后,經過多輪CFD仿真計算,對無人機外形進行適當修正,最終生產完成的10 kg尾座式垂直起降固定翼無人機如圖3所示。其采用鴨翼結構,有效提高了俯仰通道的控制能力,同時可增加橫滾通道舵面的控制能力,有利于無人機的穩定飛行,主要參數如表1所示。巡航速度為20 m/s,最大馬赫數為0.1,飛行高度2 500 m,最大升阻比約為10,失速迎角約為18°。
1.2 AF813飛控系統
AF813小型無人機飛控系統是一款面向多行業、可適應不同無人機的工業級飛控產品。該產品主要傳感器為雙余度設計,結構相較傳統的無人機飛控系統簡單、便于安裝、飛行控制效果好。該飛控系統的組成如下:
(1) 主控:內部集成STM32F407處理器、藍牙、MEMS陀螺/加速度計/氣壓計,運行FreeRTOS,支持Simulink自動代碼生成,可完成系統調度、控制律/制導律解算、輸入輸出管理、飛參存儲等功能。
(2) IMU:內部集成工業級陀螺/加速度計/氣壓計,可完成導航及姿態解算。
(3) GPS天線:內部集成了STM32F106處理器、GPS芯片/天線、MEMS磁力計,可完成GPS和磁場信息獲取。
(4) 數據鏈:采用Microhard的P840系列工業產品,具有信號穩定、傳輸距離遠的特點。
該飛控系統已在小型直升機、多旋翼、固定翼無人機等多類型、多平臺上應用多年,軟硬件系統穩定可靠,可作為10 kg尾座式垂直起降固定翼無人機的飛行控制系統搭載使用。
2 飛行控制方案
尾座式垂直起降固定翼無人機放置在地面準備飛行時,機頭向上、機尾向下。無人機飛行時的典型飛行階段如圖4所示。
垂直起飛,此階段為旋翼控制階段,無人機按照指令高度自動起飛;垂平轉換,起飛到達指令高度后,無人機低頭加速,實現旋翼模式向固定翼模式的轉換,旋翼控制與固定翼控制共同作用的綜合控制;航線飛行,此階段為固定翼航線飛行階段,旋翼控制轉為監控狀態;平垂轉換,此階段無人機將在固定翼模式下,控制無人機抬頭,飛機拉起,通過旋翼與固定翼綜合控制將無人機由固定翼模式轉換為旋翼模式;定點著陸,平垂過渡完成后,無人機以旋翼模式飛向著陸點,完成定點著陸。
針對上述典型任務階段,結合制導控制要求,本文設計無人機控制方案應實現如下功能:
(1) 旋翼模式下具備人工操作與各種穩定控制模態的無縫結合,實現無憂操縱。
(2) 固定翼具有人工操縱(姿態模式)模式。
(3) 固定翼航線飛行中可利用自動駕駛儀模態完成航線穩定飛行。
(4) 空中飛行過程中,固定翼模式和旋翼模式具備一鍵切換功能。
依據控制方案,尾座式垂直起降固定翼無人機控制部分可分為旋翼控制、固定翼控制、模式轉換三個部分。
2.1 旋翼控制
旋翼模式主要在人工飛行(旋翼模式)、起飛、垂平轉換、平垂轉換、著陸階段使用。選用朗宇電機,具有高KV值、拉力大的特點,每個電機最大可提供5.0 kg的拉力,可有效保證試飛驗證階段的飛行安全。4個電機旋轉方向如圖5所示。
旋翼控制采用改進的PID控制策略[15]。與傳統的PID控制相比,其結構簡單,物理意義相對明確,參數整定容易,具有較強的魯棒性。
無人機內回路姿態穩定控制包括俯仰、橫滾、偏航三個通道,結構如圖6所示。
無人機的外回路控制包括了位置控制和速度控制,控制結構如圖7所示。
根據上述控制結構,設計了多種控制模態:(1)GPS姿態模式,無人機姿態指令為期望姿態角,同時具有位置保持(包括高度保持)功能;(2)自動起飛;(3)自動著陸;(4)速度保持,無人機可按照指令速度飛行;(5)航線模式,無人機可按照設計航線飛行。
2.2 固定翼控制
本方案涉及的垂直起降無人機在固定翼模式飛行時,其固定翼的控制方案與傳統的固定翼無人機控制類似,根據實際的任務需求初步設計了以下控制模態:人工操縱(姿態模式)、速度保持、高度保持、航向保持、航線飛行。
2.3 模式轉換
尾座式垂直起降固定翼無人機在模式轉換階段,俯仰角在很短時間內需要完成大角度機動,此過程中空速信號也處于不穩定狀態。此階段無人機的強非線性導致獲取無人機的動力學模型極為困難,按照常規方法建立的數學模型存在較大誤差,增加了此階段控制器設計的難度。因此,如何設計控制方案保證無人機能夠在旋翼和固定翼之間平穩、安全的轉換,是此類無人機能否取得成功的關鍵。
尾座式垂直起降固定翼無人機的模式轉換包括垂平轉換和平垂轉換。模式轉換是尾座式無人機飛行最關鍵的階段,因為整個階段需要有足夠的升力來支撐無人機的重量,所以需要精心設計俯仰姿態曲線。垂平轉換階段俯仰姿態指令可分為初始過渡階段和最終過渡階段。在初始過渡階段,無人機俯仰姿態從懸停線性降低到低頭階段,該姿態的選擇取決于無人機的失速迎角。當達到失速迎角時,可從旋翼模式切換到固定翼模式。而平垂轉換階段在結束前一直處于混合控制階段,對俯仰姿態曲線的設計要求主要考察轉換的快速性[16]。
綜合以上分析,模式轉換階段的控制律采用姿態控制加高度控制的方案進行控制器的設計[17]。
2.3.1 垂平轉換
垂平轉換指無人機在起飛完成后由旋翼模式向固定翼模式轉換的階段,如圖8所示。主要包括:
(1) 低頭加速:在旋翼模式下,以無人機可穩定控制的最大俯仰角為期望值,利用旋翼模式控制無人機低頭加速;該階段為初始過渡階段,其設計中間俯仰低頭姿態為-40°。
(2) 混合控制:無人機在俯仰姿態以及前飛速度達到轉換條件后,即可轉換到混合控制階段,此階段無人機的速度已經產生部分升力,可綜合利用旋翼控制和固定翼控制讓無人機姿態改平,并持續加速到設計的巡航速度;該階段轉換條件設計為:速度大于15 m/s;高度大于30 m。
(3) 轉換完成:在無人機姿態改平后且飛行速度達到巡航速度,并穩定飛行一段時間后,無人機旋翼模式退出,進入監控狀態,無人機以固定翼模式繼續飛行。
2.3.2 平垂轉換
平垂轉換指無人機返航結束后由固定翼模式向旋翼模式轉換的階段,如圖9所示。主要包括:
(1) 轉換準備:無人機在返航結束到達著陸航點前,進行減速、降高控制,防止平垂轉換過于劇烈,增加系統的穩定性;通過轉換準備,無人機速度應低于巡航速度而大于失速速度,高度降低至離地高度30 m。
(2) 混控拉起:達到轉換條件后,無人機執行拉起動作,拉起時期望俯仰姿態角為0°(旋翼模式);此階段采用旋翼控制與固定翼控制相結合的方式,可實現快速穩定拉起。
(3) 旋翼控制:拉起完成后,固定翼模式退出,由旋翼模式繼續控制無人機穩定飛行。
(4) 轉換完成:無人機姿態角、速度達到轉化指標。
(5) 定點著陸:轉換完成后,無人機以旋翼模式飛向著陸點,執行定點著陸。
垂平轉換和平垂轉換過程充分考慮了旋翼模式的穩定控制能力,采用綜合控制的理念,實現旋翼模式和固定翼模式之間的穩定可靠轉換。
2.4 數學仿真
建立無人機的六自由度數學模型,如圖10所示。本無人機屬于傳統構型,其力和力矩的計算按照CFD獲取的無人機氣動參數可直接進行計算。
無人機動力學方程:
繞無人機質心轉動的動力學方程:
無人機質心的運動學方程:
建立繞無人機質心轉動的運動學方程:
利用MATLAB搭建無人機數學模型,設計控制律。仿真條件:4個航路點,飛行速度25 m/s;航路點高度650 m;起飛高度550 m。仿真結果如圖11~13所示。
垂平轉換過程中,設定旋翼模式的俯仰角指令為-40°,無人機低頭加速飛行。在姿態角達到期望指令后,設定15°的固定翼俯仰角指令,利用混合控制模式繼續控制無人機低頭,轉換過程約5.4 s。平垂轉換過程中,無人機固定翼俯仰角按照無人機拉起性能設計抬頭角速度,采用混合控制模式快速控制無人機拉起。在旋翼模式俯仰角大于-10°后,固定翼模式退出,無人機切換至旋翼控制,轉換過程約3.5 s。結果表明,該方案模式轉換階段無人機姿態可跟蹤期望指令,完成穩定飛行。
3 試飛驗證
試飛條件:4個航路點,飛行速度25 m/s,飛行高度500 m。某次外場試飛的飛行數據如圖14~15所示。
垂平轉換階段,無人機旋翼俯仰角和固定翼俯仰角的變化趨勢一致,轉換過程中姿態變化穩定,飛行速度線性增加,轉換過程約7 s。與仿真相比較,實際飛行時無人機低頭加速后有將近2 s的時間無俯仰角保持在40°,這是因為無人機速度未達到設定的轉換條件。若去除該時間,轉換時間與數學仿真基本一致。平垂轉換階段,無人機固定翼俯仰角快速線性拉起,飛行速度快速降低,轉換過程約3.5 s,與垂平轉換階段相比,轉換速度更快,這與該階段無人機的任務屬性和轉換過程的氣動特性有關。與數學仿真相比,轉換時間一致。
另外,針對無人機的高度控制性能進行了多次試飛測試,結果如圖16所示。該無人機高度控制精度高,具有良好的控制能力。
通過多次試飛驗證,該尾座式垂直起降固定翼無人機系統能夠實現起飛、模式轉換、航線飛行、定點著陸的穩定飛行,驗證了該方案的可行性和系統的穩定性。
4 結? 論
本文無人機系統有效改善了復合翼無人機的缺點,為垂直起降固定翼無人機提供了一種新的解決方案。經過多次試飛,結果表明該構型無人機系統穩定可靠。后續將在以下幾個方面展開進一步的研究工作。
(1) 繼續優化無人機平臺。該無人機平臺初步驗證了小型鴨式布局無人機飛行平臺的可行性,但無人機的升阻比仍有進一步提升的空間,升阻比的提高將有效延長無人機續航時間。
(2)繼續優化模式轉換的控制方案。進一步研究從起飛階段執行垂平轉換和無人機拉起時的平垂轉換,實現模式轉換的智能控制,減少轉換時間、拉起時的上沖高度,提升轉換的穩定性。
(3) 嘗試將四旋翼控制方案改為機身雙電機控制,取消上下垂尾電機,降低無人機重量。
參考文獻:
[1] 劉凱,葉賦晨.垂直起降飛行器的發展動態和趨勢分析[J].航空工程進展,2015,6(2):127-138.
Liu Kai,Ye Fuchen.Review and Analysis of Recent Developments for VTOL Vehicles[J].Advances in Aeronautical Science and Engineering,2015,6(2):127-138.(in Chinese)
[2] 于進勇,王超. 垂直起降無人機技術發展現狀與展望[J].飛航導彈,2017(5): 37-42.
Yu Jinyong,Wang Chao.The Present Situation and Prospect of Technology Development of VTOL UAV [J].Aerodynamic Missile Journal,2017(5):37-42.(in Chinese)
[3] 何小九,李彥彬,朱楓,等. 國外垂直起降無人機發展現狀及設計制造關鍵技術[J]. 飛航導彈,2016(6):22-27.
He Xiaojiu,Li Yanbin,Zhu Feng,et al.Development and Key Technology of Design and Manufacture of Foreign VTOL UAVs [J].Aerodynamic Missile Journal,2016(6):22-27.(in Chinese)
[4] 楊傳廣,馬鐵林,甘文彪,等. 垂直起降固定翼無人機技術特點淺析[C]∥中國航空科學技術大會,2017:56-61.
Yang Chuanguang,Ma Tielin,Gan Wenbiao,et al.Analysis on Technical Characteristics of VTOL Fixed-Wing UAV [C]∥China Aeronautical Science & Technology Conference,2017:56-61.(in Chinese)
[5] 朱海東. 新構型傾轉四旋翼飛行器總體方案設計與研究[D].南京:南京航空航天大學,2015.
Zhu Haidong. Design and Research of the New Configuration Aircraft of Quarter Tilt-Rotor[D].Nanjing:Nanjing University of Aeronautics and Astronautics,2015. (in Chinese)
[6] Kodera K,Miwa M.Development of Tailsitter VTOL Using Multi Rotor System[C] ∥The Proceedings of JSME Annual Conference on Robotics and Mechatronics,2017.
[7] 王波. 混合型可垂直起降飛行器技術研究[D].長沙:國防科學技術大學,2016.
Wang Bo. Research on Hybird Vertical Takeoff and Landing Aircrafts[D].Changsha:National University of Defense Technology,2016.(in Chinese)
[8] 文程祥. 小型四旋翼固定翼復合式無人機設計及控制研究[D]. 西安:長安大學,2017.
Wen Chengxiang. Research on Design a Small and Control for Quadplane[D].Xian: Changan University,2017. (in Chinese)
[9] 張健. 復合翼垂直起降無人機飛行控制技術研究[D].廈門:廈門大學,2018.
Zhang Jian. Research on Control Technology of VTOL Fixed-Wing UAV[D].Xiamen:Xiamen University,2018. (in Chinese)
[10] Ma T L,Wang X S,Wei Z H,et al.Conceptual Design of a VTOL Box-Wing UAV with Rotatable Duct-Fans[C]∥ AIAA Scitech 2019 Forum,2019.
[11] Hoeveler B,Wolf C C,Raffel M,et al.Aerodynamic Study on Efficiency Improvement of a Wing Embedded Lifting Fan Remaining Open in Cruise Flight[C]∥ 2018 Applied Aerodynamics Conference,2018.
[12] Kaparos P,Bliamis C,Yakinthos K.Conceptual Design of a UAV with VTOL Characteristics∥AIAA Aviation 2019 Forum,2019.
[13] Footohi P,Bouskela A,Shkarayev S.Aerodynamic Design of Long-Range VTOL UAV[C]∥ AIAA Scitech 2019 Forum,2019.
[14] 劉玉燾. 尾座式無人機的飛行控制器設計[D].哈爾濱:哈爾濱工業大學,2014.
Liu Yutao. Design of Flight Controller for a Tail-Sitter UAV[D].Harbin:Harbin Institute of Technology,2014. (in Chinese)
[15] 雷志榮,宋棟梁,史龍,等. 基于PID的通用小型無人直升機控制方法[C]∥ 2018 IEEE/CSAA 導航、制導與控制會議,2018:2889-2893.
Lei Zhirong,Song Dongliang,Shi Long,et al.A PID-BasedControl Method for General Small Unmanned Helicopter [C]∥2018 IEEE/CSAA Guidance,Navigation and Control Conference,2018:2889-2893.(in Chinese)
[16] Swati S,Hardik P,Mangal K,et al.Biplane-Quadrotor Tail-Sitter UAV:Flight Dynamics and Control [J]. Journal of Gui-dance,Control,and Dynamics,2018,41(5):1049-1067.
[17] Yeo Y T,Liu H H.Transition Control of a Tilt-Rotor VTOL UAV [C]∥ 2018 AIAA Guidance,Navigation,and Control Conference,2018.
10 kg Tail-Sitter VTOL UAV System
Lei Zhirong1,2*,Zhao Chao2,Qin Wei2,Zuo Ling2
(1.School of Automation,Northwestern Polytechnical University,Xian 710072,China;
2.AVIC Xian Flight Automatic Control Research Institute,Xian 710065,China)
Abstract:Based on the analysis of the current status of VTOL UAVs at home and abroad,a new type of tail-sitter VTOL UAV with canard configuration and four rotors is proposed to avoid disadvantages of the quad-plane UAVs. Through optimizating aerodynamic design,selecting the flight control system,designing control method,especially discussing the conversion of rotor mode and the fixed-wing mode,the UAV modeling and control law simulation are completed,and the scientific research flight test is carried out. The flight results show that this type of UAV keeps the advantages of quad-plane UAV and avoids its inherent disadvantages. It can be further studied in the future as an important research direction of the VTOL UAVs.
Key words:tail-sitter;VTOL;canard wing;mode convert;flight control; UAV
收稿日期:2020-05-26
基金項目:國防科技重點實驗室基金項目(WDZC2019601A105)
作者簡介:雷志榮(1980-),男,陜西合陽人,高級工程師,研究方向是飛行控制。
*E-mail:kyj_37@163.com
猜你喜歡
電腦知識與技術(2016年28期)2016-12-21 12:21:32
電子技術與軟件工程(2016年19期)2016-12-19 18:28:28
新教育時代·教師版(2016年27期)2016-12-06 18:14:59
中國科技縱橫(2016年17期)2016-11-30 11:51:57
農機使用與維修(2016年10期)2016-11-10 09:45:55
人間(2016年26期)2016-11-03 17:52:40
中國科技博覽(2016年22期)2016-11-01 18:10:31
科技視界(2016年22期)2016-10-18 14:30:27
企業導報(2016年9期)2016-05-26 20:58:26
