基于仿生機器魚的水環境監測設備開發
2020-02-04 07:44:05楊曉貝
現代鹽化工 2020年4期
關鍵詞:設備
楊曉貝
摘 要:自長江中華鱘滅絕之后,我國水環境保護已經到了迫在眉睫的時期,必須要及時把握水質變化和污染情況,確保水環境的質量。為了實現持續有效的監測,傳統方式一般采用多固定點的模式,該模式成本昂貴,不能準確、實時、動態地實施監測。因此,研究了一種基于仿生機器魚的水環境監測設備,并且對其應用進行了分析。
關鍵詞:仿生機器魚;水環境;監測;設備
我國水污染情況極為危急,已經嚴重危害到生態平衡,對環境的可持續發展造成了根本的威脅,人民的生存和健康面臨巨大的考驗。要建設綠水青山、解決我國水資源短缺和需求的巨大矛盾,就要加強對水溫、pH、溶解氧及濁度等指標的監測,避免污染和人為損害[1]。水污染的濃度是不斷變化的,會受到時間、地點、氣象等不同條件的影響,采用傳統人工采樣的方法未必準確,而且投入和耗時都比較巨大,反應遲鈍。因此,采用動態監測技術勢在必行。近年來,機器魚的技術飛速發展,智能化水平不斷提高,能夠實現智能監測,甚至還有污染治理功能,這為本研究提供了思路。本研究以低成本、小體積、智能化為原則,對基于仿生機器魚的水環境監測設備的開發提出了創新的觀點。
1 總體方案設計
1.1 總體架構
采用浮標式水質監測系統架構,采用頻率為3次/s,能夠準確檢測溫度、pH、濁度信號等指標,提高檢測的精確度。檢測數據既要可以在仿生魚機器人系統終端界面顯示,還要能夠遠程上傳到PC端和移動端。在機器魚的終端,要自動采樣,分類處理,實時收集實驗數據,顯示各項監測指標,能夠生成歷史曲線,包括最大值、最小值及截至目前的平均值等數據,并且進行數據處理,自動生成診斷報告。系統還應具有數據保存功能,界面終端和PC端都具有數據存儲功能,確保在劇烈運動和撞擊情況下不會丟失數據。同時,設置自動報警裝置,在超過警戒線時,自動報警。系統采用4層結構,加裝智能化模塊,方便后期升級管理,4層分別為水質傳感器檢測層、現場數據處理層、無線數據傳輸層和遠程控制管理層[2]。系統的總體架構如圖1所示。
1.2 通信方案
采用無線通信方式,包括串口、工業無線網、藍牙和互聯網通信等方式,采用Cortex-A8以上核心處理器,各模塊要確保抗干擾性強,采用加密算法實現數據的保密,能夠在省電模式進行低能耗工作。同時,還要考慮到成本低廉,在模塊化模式下選擇ATK-HC05藍牙模塊、機智云模塊等,提高系統的智能性。仿生機器魚通過傳感器連接到微控制單元(Microcontroller Unit,MCU)系統,然后接入通信模組,突破了數據傳輸距離的限制。平臺還可以增加多功能模塊,提升機器仿生魚全生命周期服務的能力。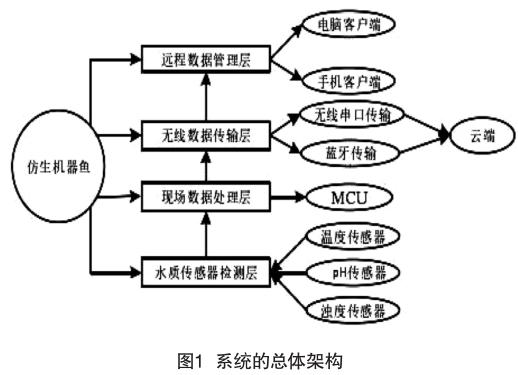
1.3 監測和定位方案
對水質參數按照物理、化學、生物進行分類,具體分析濁度、透明度、色度、水溫、pH、生化需氧量(Biochemical Oxygen Demand,BOD)、化學需氧量(Chemical Oxygen Demand,COD)、溶解氧(Dissolved Oxygen,DO)、農藥、菌類、微生物等指標。系統要能夠實時顯示這些數據,并且通過各個端口控制信號,比如,通過液晶顯示器(Liquid Crystal Display,LCD)模塊進行傳輸顯示[3]。內置GPS模塊進行定位,采用異步串行傳送方式進行傳輸,通過GPS模塊傳輸到數據分析中心,經過網絡上傳到地圖平臺,如此循環往復。系統有自動導航功能,可以按照軌跡自主運動,無需人為控制。
2 系統設計與實現
2.1 硬件設計
硬件設計要采用模塊化方式,主要硬件包括傳感器、信號調理機構、主控機構、LCD顯示機構、無線串口機構、藍牙機構、電源設備、按鍵部件等。處理器要綜合考慮速度、性能和成本,滿足系統運行需要,更要降低能耗,減少發熱量。在此基礎上,做好主控模塊電路模塊設計,完善總體架構。傳感器要性能良好、抗干擾能力強,封裝后能夠適合多種工作場景,測量范圍大、測量精度高,支持多點采集。硬件設計要遵循可靠性、經濟性和科學性原則,提高系統的監測能力,能夠在不同工況下進行監測。供電系統可以使用燃油動力、鋰電池和太陽能電池板等,提升續航能力。硬件設計的通用性應該較強。
2.2 軟件設計
選擇C語言進行編程,安裝LCD驅動程序,完善各個硬件模塊的驅動程序,系統界面參照Windows模式,提升顯示的人機和諧度[4]。系統還應該和外界平臺相連接,能夠在移動端和PC端進行遠程操作和控制。雖然系統數據要有加密性,但是考慮到環保的公益性和信息共享性,盡量提升系統開放性。無論在手機端還是PC端,都要求操作簡單、界面友好、數據共享和處理方便,而不是復雜的編程。同時,為了方便設計人員修改,還可以采用可視化編程等模式,提高設計性。為了提高系統的通用性,應該盡量使用外部開放軟件進行連接,提升兼容性,強化系統功能。在系統完善之后,要進行精確的測試,對溫度、pH、濁度、微生物含量等指標進行檢驗和對比。
3 系統應用與創新
3.1 在水環境污染監測中的應用
多個仿生機器魚監測系統可以同時工作,按照規劃線路進行監測,發現污染源的位置之后向監控中心報警。同時,機器魚之間也要進行聯網互動,實現團結協作,提升監測效率。為了提高監測的精度,就要對污染源的位置進行搜索,傳統采用排查的方式逐漸縮小范圍。針對于此,可以進行一些方法上的改進,比如,根據污染源擴散的濃度梯度來搜索污染源的位置。為了提升污染源監測功能,仿生魚系統在設計中還應該注意確保其密封性,除了漂浮之外,還應該具有潛水功能。除了監測功能,還可以根據仿生魚的大小,安裝污染清除裝置,比如針對水面油污,安裝油污回收裝置。還可以結合我國水環境監測的實際需要,設置探測和搜救功能,提升系統的多元應用性能[5]。視頻拍攝功能將是仿生機械魚的主要功能,在設備上安裝可360°旋轉的攝像頭,對水下環境進行拍攝,還可以探測魚群的狀態。
3.2 當前水污染監測仿生機器魚的技術瓶頸
首先,動力技術還存在不足,仍然有將電池作為動力的情況,大多數采用充電方式提供動力,能夠提供的能量有限,如果要使用全過程視頻高清晰拍攝等功能,那么耗電量就比較大。為了解決這一問題,未來仿生魚可以采用氫能源等清潔動力,確保動力系統的持久性。其次,成本較高,一臺能潛水50 m以下的機器仿生魚成本高達十多萬,而且通用性差,還需要個別定制。目前,不同的仿生魚編程技術不同,功能較少,也不能滿足用戶的需求。這主要是因為仿生魚運動學技術研發的成本較高,需要較大的科技投入。要想解決這一問題,就要進一步提升技術標準的通用性,實現各部件的標準化生產。最后,環保性還有待提高,有造成二次污染的風險。比如,造成輻射性污染和油污泄漏的風險。這需要進一步探索綠色技術,提升密封性。
4 結語
仿生機器魚是基于仿生學原理,針對我國水環境的污染現狀,為提升水環境監測水平而設計的。未來智能化將是系統的主要發展方向,仿生魚將會更好地用于水質監測環境,實現智能化和自主化作業。比如,自動根據水質情況提出智能化判斷和處理建議,實現自主探測和救援功能。
[參考文獻]
[1] 李巖.我國的水環境現狀研究[J].科技風,2016(18):139.
[2] 葉璐,張珞平,郭娟,等.河口區海洋環境監測與評價一體化研究Ⅰ—珠江口水環境監視性監測方案設計,實施和改進[J].海洋環境科學,2014,33(1):105-112.
[3] 付如彬,李亮,徐成.基于強化學習的仿生機器魚節能研究[J].北京大學學報(自然科學版),2019,55(3):405-410.
[4] 劉珍娜,秦婧文.淺談仿生水下機器人的發展現狀[J].山東工業技術,2018(1):201.
[5] 陳玨.我國水環境監測存在的問題及對策[J].環境與發展,2019(4):181.
Development of water environment monitoring equipment based on bionic robot fish
Yang Xiaobei
(Shanxi Conservancy Technical Institute, Yuncheng 044004, China)
Abstract:Since the extinction of Acipenser sinensis in the Yangtze River, the water environment protection in China has reached an urgent period. We must grasp the water quality change and pollution situation in time to ensure the quality of water environment. In order to achieve continuous and effective monitoring, the traditional mode is usually multi fixed point mode, which is expensive and can not complete the monitoring accurately, in real time and dynamically. Therefore, this paper studies a kind of water environment monitoring equipment based on bionic robot fish, and analyzes its application.
Key words:bionic robot fish; water environment; monitoring; equipment
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
當代工人(2020年13期)2020-09-27 23:04:20
經濟技術協作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
電子制作(2018年10期)2018-08-04 03:24:48
家庭影院技術(2017年11期)2017-12-20 08:10:57
工業設計(2016年12期)2016-04-16 02:52:00
IT時代周刊(2015年8期)2015-11-11 05:50:37
汽車維修與保養(2015年1期)2015-04-17 03:25:28
設備管理與維修(2015年12期)2015-04-09 06:57:00