基于可編程邏輯控制器的銀杏園智能灌溉機器人設計與實現(xiàn)
2020-02-07 06:04:48李杜林萍陳永明
浙江農(nóng)業(yè)科學 2020年1期
李杜,林萍,陳永明
(鹽城工學院 電氣工程學院,江蘇 鹽城 224051)
隨著高新技術與現(xiàn)代農(nóng)業(yè)的發(fā)展和應用,傳統(tǒng)的農(nóng)業(yè)管理模式已經(jīng)不能適應現(xiàn)代農(nóng)業(yè)發(fā)展的需求,亟須引入先進的技術管理手段。水分是影響作物生長的關鍵環(huán)境因子,合理的灌溉手段是提高作物產(chǎn)量最有效的途徑。智能灌溉模式不僅可以節(jié)水節(jié)工,而且還可以在灌溉過程中避免人為產(chǎn)生的不利因素影響,提高灌溉的準確性和水資源利用效率[1-3]。在此背景下,以葉用銀杏園為研究對象,設計一種利用可編程邏輯控制器(PLC)實現(xiàn)智能控制的灌溉機器人,按照銀杏樹的需水規(guī)律進行不同生育期的需求設計,把水分定時定量直接提供給銀杏,實現(xiàn)智能控制,為銀杏園的灌溉工程提供簡便、省力與高效的智能化解決方案。
1 系統(tǒng)介紹
灌溉機器人采用三菱PLC作為控制核心,將傳感器采集到的數(shù)據(jù)與PLC內部程序中的設定值進行比較,通過比較結果輸出PLC控制指令,驅動執(zhí)行機構的動作。同時,通過控制噴灌通路電磁閥的通斷時長來實現(xiàn)對噴灌水量的控制。
2 控制原理
采用PLC作為灌溉機器人的控制中心。PLC外部接線簡單,內部程序編程易于掌握,在輸入輸出信號時采用光電隔離,對外界的抗干擾能力強,而且灌溉機器人的控制系統(tǒng)輸出信號都是開關量,因此,PLC控制器十分適合在室外銀杏園環(huán)境中應用[4]。三菱是市場上常見的PLC品牌,本設計采用三菱FX2N-32MR-001型PLC。
PLC的輸入信號包括溫濕傳感器采集的模擬量。這些模擬信號首先經(jīng)過三菱的A/D轉換模塊(三菱FX2N-4AD)轉換成數(shù)字信號,然后傳輸?shù)絇LC中供PLC內部存儲程序進行處理與運算。位置傳感、測距傳感器、水位傳感器采集的信號為數(shù)字量輸入,可以直接進入PLC進行邏輯處理,最后輸出控制信號。機器人控制系統(tǒng)中,PLC控制的部分有給水泵和灌溉泵啟停,水箱蓋開閉,以及前輪的電動機、灌溉轉臺電動機、蓄電池的通斷(圖1)。
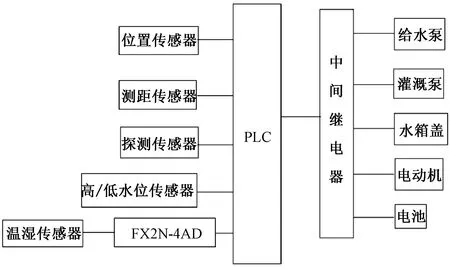
圖1 灌溉機器人的控制原理
3 系統(tǒng)設計
3.1 機器人灌溉路徑設計
在銀杏園的灌溉路線上鋪設電磁引導線,采用信號發(fā)生器使電流發(fā)出電磁信號。在灌溉機器人的兩端設置電磁傳感器,采集電磁引導線發(fā)出的電磁信號并發(fā)送給PLC進行邏輯處理。PLC根據(jù)電磁傳感器采集的電磁引導線信號作為依據(jù),控制機器人的2個前輪電動機。具體如圖2所示。
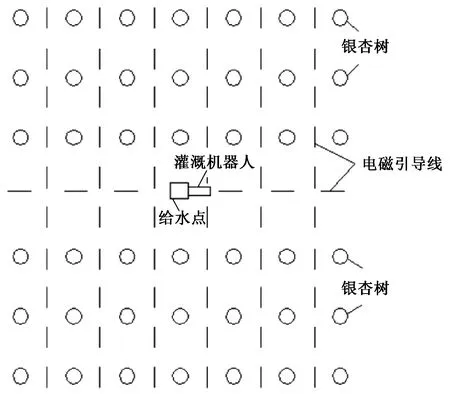
圖2 銀杏園的灌溉路徑
3.2 機器人整體結構設計
水箱里設置水位傳感器監(jiān)測水量的變化。當高水位傳感器監(jiān)測到水位發(fā)出信號時,代表水箱中的水已滿,PLC發(fā)出給水泵的停止控制信號和水箱蓋的閉合控制信號,水箱停止補水,水箱蓋合上,灌溉機器人開始灌溉工作。反之,當?shù)退粋鞲衅鞅O(jiān)測到水位時,代表水箱里已經(jīng)沒有水。
機器人根據(jù)設置在兩端的電磁傳感器采集到的電磁引導線信號控制前輪電動機后退到給水點進行水箱補水。給水泵設置在給水點處,用于給灌溉水箱補水。位置傳感器3設置在灌溉管道上,當PLC接收到位置傳感器3的信號時,意味著灌溉機器人已經(jīng)處于給水位置,PLC便會發(fā)出給水泵的啟動控制信號和水箱蓋的開啟控制信號,進行水箱補水。具體機器人結構設計如圖3所示。
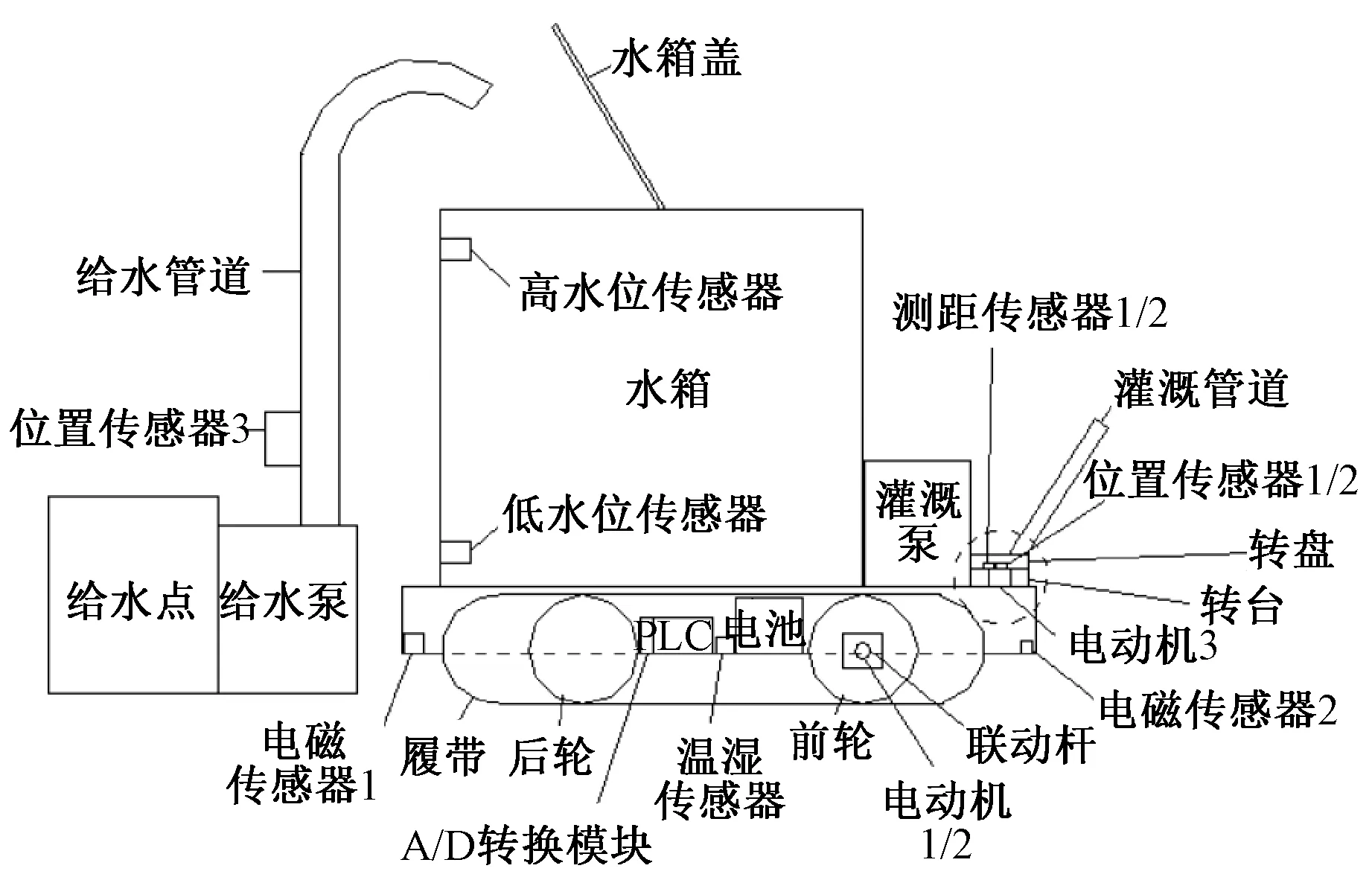
圖3 機器人整體結構的設計
3.3 機器人底盤結構設計
機器人的底盤可采用亞克力板,這種特殊處理的有機玻璃硬度高,抗老性能好,可以適應風吹雨淋、日光照射的室外環(huán)境,而且透明度好,在檢修過程中利于操作人員方便作業(yè)[5]。
在機器人底盤上,灌溉水箱后置,電動機和電池前置,以避免頭重腳輕的情況,保證機器人移動時平順。
由于銀杏園的林間道路并不十分平坦,因此采用履帶推進方式。根據(jù)機器人與灌溉水箱的質量,電動機1和電動機2采用250 W直流旋變無刷伺服電機,通過聯(lián)動桿,將動力從電機傳遞到2個前輪上。根據(jù)電機1、2和灌溉水泵的電機型號,選擇3個N100 12V 100AH的電池并聯(lián),為機器人提供充足動力。
電動機1和電動機2通過聯(lián)動桿分別控制機器人兩側的前輪和履帶。當機器人前進和后退時,2個電動機同時啟動,以共同的速度前轉或者后轉。當機器人轉彎時,2個電動機中的一個停止工作,另一個電動機保持轉動,使機器人完成轉彎動作。電池放置在機器人上用于機器人上電動機的供電。當機器人上的電動機即將沒電時,給PLC發(fā)出信號,PLC控制機器人回到給水點的位置。電池旁設置溫濕傳感器。當溫濕傳感器發(fā)出信號時,指示溫度與濕度環(huán)境已經(jīng)不適合機器人運作。當PLC接收到溫濕傳感器信號后,發(fā)出電池停止供電的控制信號,同時發(fā)出無線信號通知管理人員進行維修或者回收。
電磁傳感器負責探測敷設在銀杏園地面的電磁引導線位置。PLC根據(jù)電磁傳感器探測的信號控制機器人的位移。具體的機器人底盤結構設計如圖4所示。
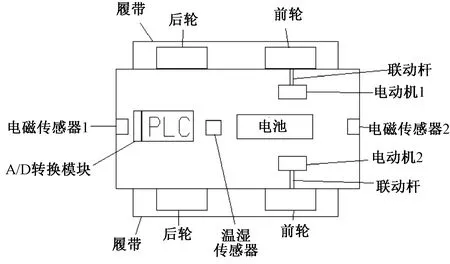
圖4 機器人底盤結構的設計
3.4 灌溉管道轉臺結構設計
測距傳感器1、2分別布置在灌溉管道轉臺的兩側。測距傳感器采用AJ-SR04 M一體化超聲波測距模塊,該模塊的測量距離可以根據(jù)銀杏園樹木的實際間距進行設置。當測距傳感器1探測到有樹木經(jīng)過時,PLC發(fā)出信號控制機器人暫停動作,同時控制電動機3通過正反轉帶動轉臺和灌溉管道向測距傳感器1所在側轉動。當灌溉管道灌溉方向轉動至測距傳感器1側的樹木時,位置傳感器1發(fā)出信號,PLC接收到信號后發(fā)出電動機3的停止信號與灌溉泵的啟動信號,機器人開始噴水灌溉。灌溉的水量依據(jù)灌溉管道噴水的時間進行控制,當噴水時間達到設定值后PLC便會控制灌溉泵停止運作,同時控制機器人繼續(xù)行進,直至灌溉水箱沒水。具體如圖5所示。
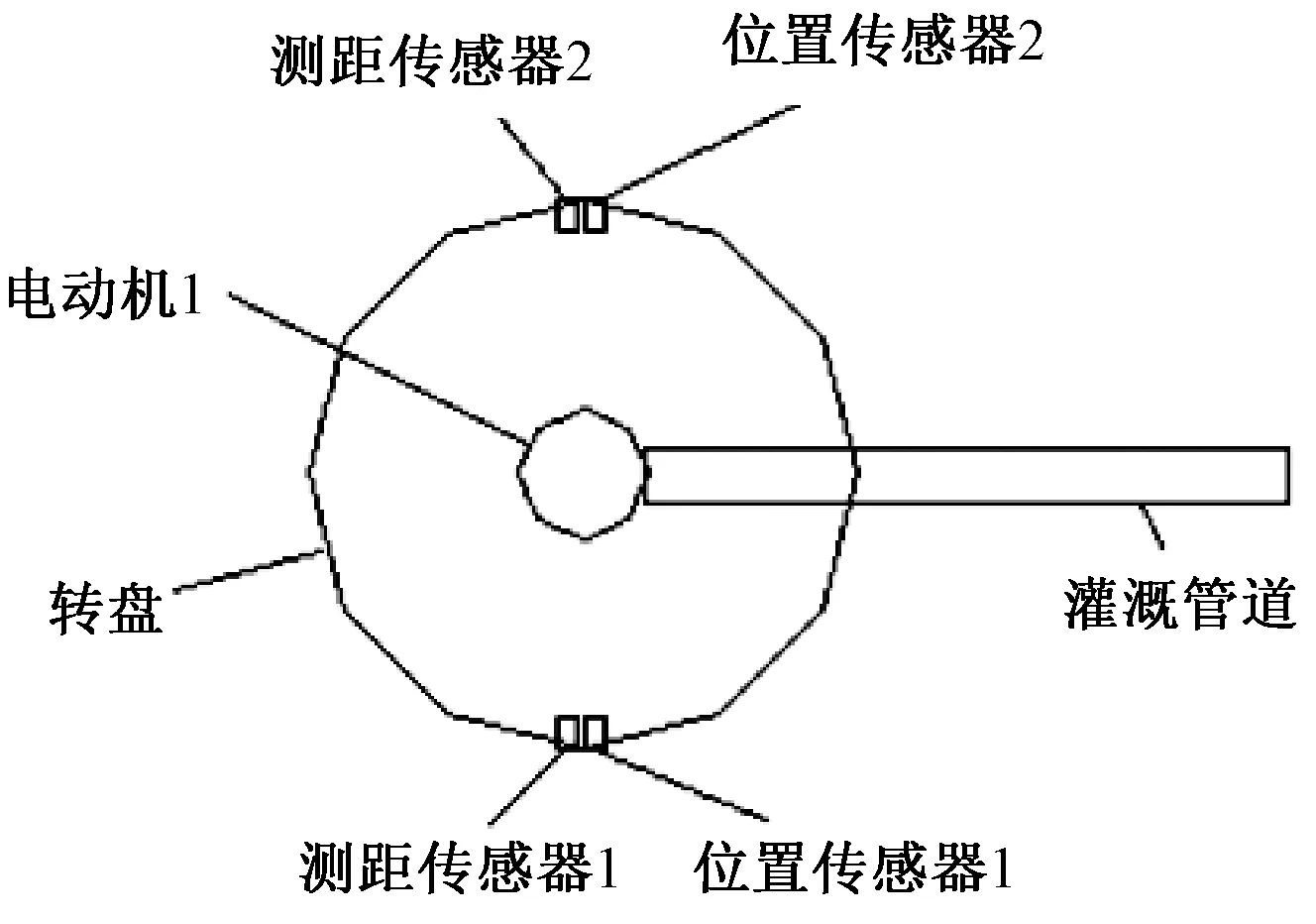
圖5 灌溉管道轉臺結構的設計
4 小結
將PLC應用在灌溉機器人的控制中,簡化了灌溉系統(tǒng)的結構設計與硬件接線,實現(xiàn)了灌溉的智能控制,達到了節(jié)省用水和節(jié)省人力的目的,灌溉質量也得到了顯著提高。
猜你喜歡
建材發(fā)展導向(2023年6期)2023-03-31 02:51:38
房地產(chǎn)導刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導向(2021年13期)2021-07-28 07:15:50
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
專用汽車(2016年5期)2016-03-01 04:14:49
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國房地產(chǎn)業(yè)(2016年2期)2016-03-01 01:25:23
中國房地產(chǎn)業(yè)(2016年24期)2016-02-16 06:10:22
