環月降軌實現月面著陸的控制策略
2020-02-11 08:15:04李革非劉勇馬傳令郝大功
北京航空航天大學學報 2020年1期
關鍵詞:控制策略
李革非,劉勇,馬傳令,郝大功
(1.航天飛行動力學技術重點實驗室,北京100094; 2.北京航天飛行控制中心,北京100094)
“嫦娥四號”任務的圓滿成功,實現了中國探月工程的“五戰五捷”。縱觀“嫦娥一號”“嫦娥二號”“嫦娥三號”“嫦娥四號”及“嫦娥五號”再入返回飛行試驗器的5次飛行任務,有3次任務與月球落月和月面著陸相關。“嫦娥一號”探測器從100 km環月圓軌道進行降軌控制,受控落月于坐標為52.27°E1.64°N的豐富海中心[1]。“嫦娥三號”探測器在環月100 km圓軌道運行期間,實施軌道機動,進入100 km×15 km橢圓軌道,經過動力下降,以軟著陸的方式降落在月球虹灣地區[2]。“嫦娥四號”探測器在地月轉移、近月制動、環月飛行后,進入100 km×15 km 橢圓軌道,擇機動力下降,在月球背面馮·卡門撞擊坑實現人類首次月球背面軟著陸[3]。
相對于月球正面大面積平坦的月海區域,月球背面地形整體崎嶇復雜,地形地貌的變化會對探測器的軟著陸探測產生一定的影響。對照“嫦娥三號”和“嫦娥四號”的月面著陸區域,“嫦娥三號”著陸區經度范圍約16.4°,緯度范圍約3°,而“嫦娥四號”著陸區為南極-艾特肯盆地(South-Pole Aitken Basin,SPA),著陸區范圍減小到經度范圍約4°,緯度范圍約2°[4]。由于“嫦娥四號”相比“嫦娥三號”的著陸區范圍大幅減小,根據“嫦娥三號”實現月面軟著陸的要求,“嫦娥四號”提出了定點著陸的要求,同時為保證地面測控條件和月面工作光照條件,對著陸時間也提出了約束,即實現定時定點月面軟著陸的嚴格要求。
月面定點軟著陸對進行月面勘測或載人登月都有著重要的意義[2]。“阿波羅”工程后期的飛行實踐表明,探測器完全可以在月球表面預定位置準確降落,實現定點著陸[5]。眾多文獻對在地外天體探測中實現定點著陸的軌道設計問題進行了研究[6-11]。文獻[5-6]考慮了調整地月轉移時間、環月軌道傾角、月面下降圈次和調相軌道等月面定點著陸方案。文獻[7-8]的研究表明,除了變軌策略設計,動力下降過程中制導、導航與控制系統(GNC)精確調整縱向和橫向航程的能力,也是成功實現地外天體定點著陸的關鍵因素。文獻[9-10]重點對采用調相軌道和軌道面調整的定點著陸策略進行了初步比較分析。文獻[11]提出了在近月制動期間通過軌道面修正調整著月點經度。文獻[12]對月面定點著陸變軌策略進行了研究,推薦月面定點著陸可采用的變軌策略為包括降軌變軌策略和軌道平面調整策略。文獻[13]設計了環月非對稱降軌控制策略。文獻[14]根據成像的約束條件和測定軌要求,給出了降軌軌道控制的計算方案。文獻[15]介紹了試驗器拓展試驗中環月降軌至虛擬月面起飛入軌點橢圓軌道的控制策略。眾多文獻對月面定點著陸研究較多,但對含有定時約束的月面定點著陸關注較少。
根據月球著陸探測器飛行軌道,月面著陸前的環月降軌控制是實施探測器動力下降前的關鍵,保證動力下降開始點滿足位置、速度等要求。當探測器實施環月降軌控制時,面臨著通過一次軌道機動消除之前軌道控制的偏差,以盡量滿足動力下降和月面著陸的要求,因此,環月降軌控制策略十分重要。本文基于環月降軌的軌道控制目標,建立了環月降軌控制方程,將環月降軌單脈沖控制變量的不同組合與月面著陸目標參數建立了3種關系,設計了定時定點月面著陸、定點月面著陸和目標緯度區域月面著陸3種環月降軌控制策略。
1 月面著陸飛行過程
中國月面軟著陸探測器飛行過程分為發射段、地月轉移段、環月段、動力下降段和月面工作段[2],如圖1所示。
1)發射段。探測器由運載火箭提供進入地月轉移軌道的速度,探測器直接進入傾角28.5°、近地點約200 km、遠地點約380 000 km的大橢圓地月轉移軌道。
2)地月轉移段。地月轉移時間約4~5 d,期間進行2~3次中途修正,最終到達高度約100 km的近月點。
3)環月段。近月制動后,探測器首先進入約100 km高的環月近極軌圓軌道;根據實際軌道與目標著陸區的匹配性,擇機進行環月軌道修正,微調軌道周期和軌道傾角,以實現著陸于目標著陸區內;變軌進入100 km×15 km環月橢圓軌道,以滿足精確測定軌和探測器下降著陸前的要求;隨后從高度約15 km的近月點開始動力下降。
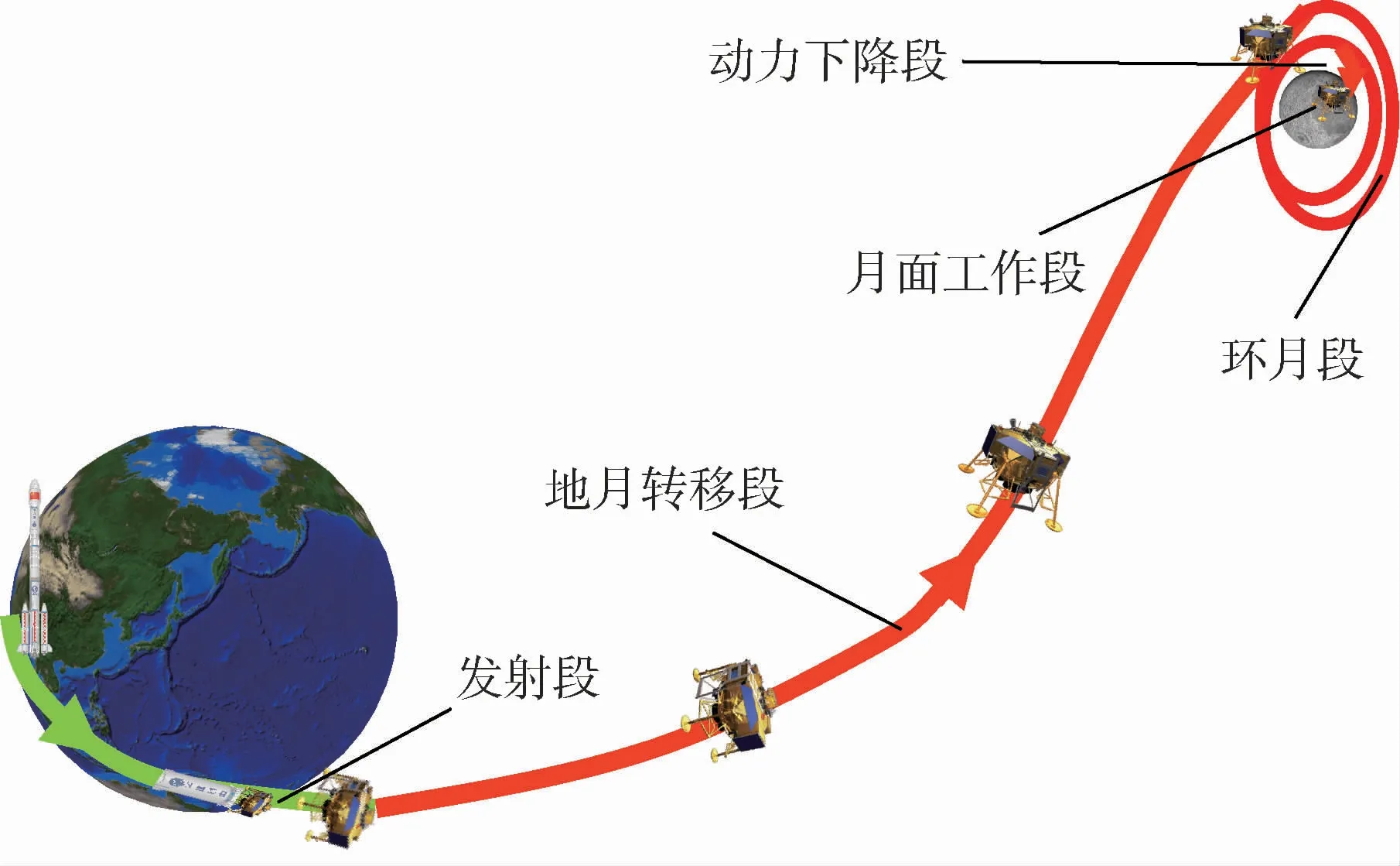
圖1 探測器月面軟著陸飛行過程示意圖Fig.1 Schematic diagram of lunar probe’s soft landing flight process
4)動力下降段。探測器動力下降過程經過著陸準備段、主減速段、快速調整段、接近段、懸停段、避障段、緩速下降段,最后軟著陸于目標著陸區。
月球探測器定時定點著陸月面的飛行軌道控制要求為:對應確定的發射入軌時刻,探測器在預定的著陸時刻著陸于預定的月面著陸點。按照探測器著陸月面的飛行過程,通過中途修正、近月制動、環月修正、環月降軌和動力下降的五段軌道控制實現探測器在月面定時定點著陸。其中,中途修正、近月制動、環月修正、環月降軌均由地面飛行控制中心根據探測器實測軌道離線規劃控制,動力下降是由探測器自主在線規劃控制。
2 月面著陸的環月降軌控制
2.1 環月降軌控制目標
探測器定時定點到達標稱動力下降點是保證定時在預定著陸點實現月面著陸的前提。
2.2 環月降軌控制方程
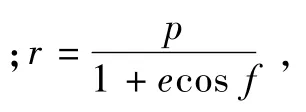
根據高斯攝動方程,徑向脈沖Δvr、橫向脈沖Δvu、法向脈沖Δvn產生的軌道要素變化如下:

式中:μ為引力常數;軌道參數a、e、i、Ω、ω、f、rp分別為軌道半長軸、偏心率、傾角、升交點赤經、近月點幅角、真近點角、近月點月心距p=a(1-e2)。
軌道真近點角是飛行時間的函數,即

從式(1)~式(6)可知:
1)控制變量為控制點時間和橫向速度增量:t、Δvu,可控目標參數為:rp、ω。
2)控制變量為控制點時間、徑向速度增量和橫向速度增量:t、Δvr、Δvu,可控目標參數為:a、e、ω或a、rp、ω。
3)控制變量為控制點時間、徑向速度增量、橫向速度增量和法向速度增量:t、Δvr、Δvu、Δvn,可控目標參數為:a、e、ω、i、Ω或a、rp、ω、i、Ω。
2.3 環月降軌的3種控制策略
環月降軌控制變量不同組合的控制策略可對動力下降點不同目標參數進行控制,實現不同方式的月面著陸。下面按照控制變量由少到多的組合順序,依次闡述目標緯度區域月面著陸、定點月面著陸和定時定點月面著陸的控制策略。
2.3.1控制策略1:目標緯度區域月面著陸
環月降軌控制變量為控制點時間和橫向速度增量:X=[t,Δvu],控制目標為動力下降點的月面緯度、近月點高度和近月點幅角:,實現目標緯度區域月面著陸。
求解步驟如下:
步驟1 初始軌道外推至環月降軌控制圈,初始控制點選擇在動力下降點的軌道對稱位置點,設uC為初始控制點緯度幅角,uPD為動力下降點緯度幅角,則有uC=uPD+π,得到控制點時間初值t;控制目標初值為得到控制變量初值Δvu。
步驟3 采用牛頓迭代法,通過對控制變量t、Δvu微分建立雅可比矩陣進行求解,迭代修正直 至hPD、ωPD達到目標參數收斂要求,即
2.3.2 控制策略2:定點月面著陸
環月降軌控制變量為控制點時間、徑向和橫向速度增量:X=[t,Δvr,Δvu],控制目標為動力下降點的月面經度、緯度、近月點高度和近月點幅角實現定點月面著陸。
求解步驟如下:
步驟1~步驟2 同控制策略1。
步驟3 采用牛頓迭代法,通過對控制變量t、Δvr、Δvu微分建立雅可比矩陣進行求解,迭代修正直至aPD、hPD、ωPD達到目標參數收斂要求,即εω,其中,初始半長軸目標atPD根據動力下降點近月點高度設定,迭代計算根據步驟4進行修正。
步驟4 修正動力下降點經度偏差。將實際動力下降點經度與標稱動力下降點經度的偏差ΔλPD歸算為從環月降軌到動力下降的軌道周期差:

式中:ωm為月球自轉角速度;QHD_PD為環月降軌到動力下降的軌道飛行圈數。
返回步驟2,重新進行環月降軌控制計算,直到ΔP小于設定門限εP,即
2.3.3 控制策略3:定時定點月面著陸
環月降軌控制變量為控制點時間、徑向、橫向和法向速度增量:X=[t,Δvr,Δvu,Δvn],控制目標為動力下降點的時刻、月面經度、緯度、近月點高度、近月點幅角:Y=實現定時定點月面著陸。求解步驟如下:
步驟1~步驟4 同控制策略2。
步驟5 修正動力下降點時間偏差。環月降軌后,實際軌道與標稱軌道的軌道平面偏差將影響探測器無法在標稱動力下降點時刻到達標稱動力下降點。為實現定時定點月面著陸,必須對軌道平面偏差進行修正。
根據實際動力下降點相對標稱動力下降點的時刻和位置的偏差,確定實際軌道與標稱軌道的軌道平面偏差,如圖2所示。
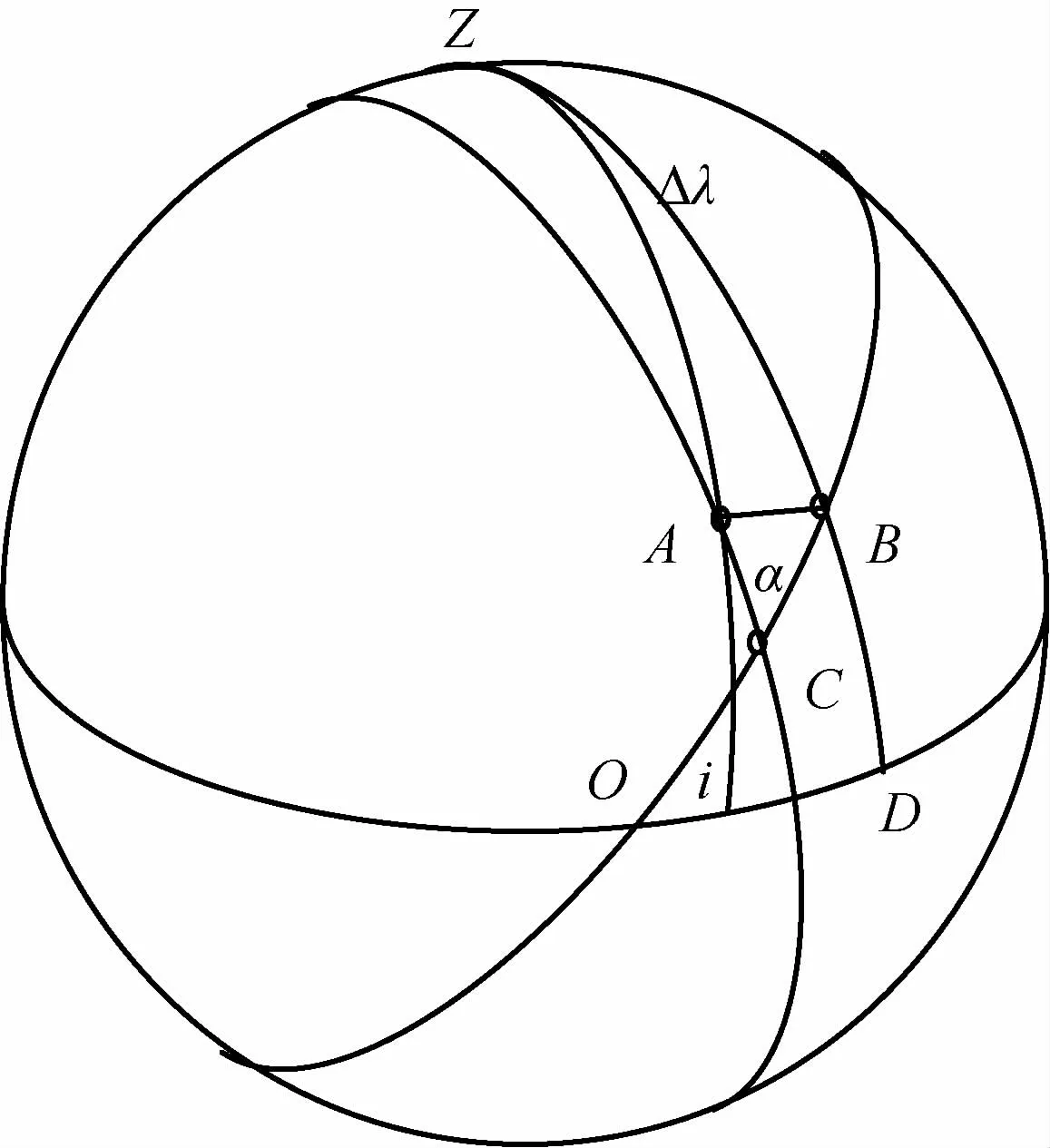
圖2 動力下降點的軌道平面偏差Fig.2 Orbit plane deviation of power descending point
在實際動力下降點時刻TPD建立瞬時慣性坐標系。標稱動力下降點A的赤經可表示為

式中:標稱動力下降點在標稱動力下降點時刻的赤經需考慮標稱時刻與實際時刻的時間偏差ΔTPD引起的動力下降點的經度變化。
標稱動力下降點A的緯度為標稱動力下降點A的位置矢量為
由于實際動力下降點與標稱動力下降點不在同一軌道面內,通過對軌道平面進行修正,可將實際動力下降點修正到標稱動力下降點。
分別計算標稱動力下降點和實際動力下降點的軌道平面法向矢量:N AC=R A×R C,N BC=R B×R C。實際動力下降點與標稱動力下降點之間的平面夾角即為軌道平面偏差
在環月降軌控制中,引入法向脈沖消除軌道平面偏差,如圖3所示。
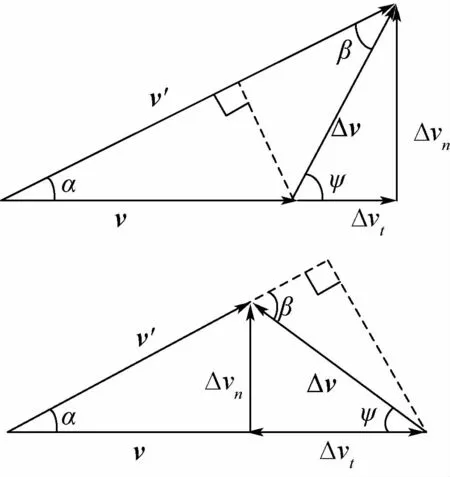
圖3 法向脈沖修正軌道平面偏差Fig.3 Normal impulse to correct orbit plane deviation
設探測器控前速度矢量為v,控后速度矢量為v′,控 制脈沖矢量為Δv,脈沖法向分量為Δvn,則有:sinβ,其中,β=arcsin當Δv為加速時,ψ=β+α;Δv為減速時,ψ=β-α。
返回步驟2,重新進行環月降軌控制計算,直到動力下降點時間偏差ΔTPD小于設定門限εT,即
2.4 環月降軌控制解分析
根據控制策略2和控制策略3實現定點月面著陸時,環月降軌必須對半長軸和近月點高度進行組合控制。由于環月降軌為單脈沖控制,半長軸和近月點高度具有耦合關系,因此半長軸和近月點高度組合控制存在有解和無解的情況。
如圖4所示,當控前軌道與控后軌道相交時,存在2個控制點,可控制半長軸和近月點高度滿足要求;當控前軌道與控后軌道相切時,存在1個控制點,可控制半長軸和近月點高度滿足要求;當控前軌道與控后軌道不相交時,單脈沖無法同時控制半長軸和近月點高度滿足要求;只能優先滿足近月點高度要求,部分消除半長軸偏差。
因此,控制策略2和控制策略3適用于軌道相交和相切的情況;控制策略1適用于軌道不相交的情況。另外,當軌道不相交時,控制策略2和控制策略3可以通過部分消除半長軸偏差的影響,而減小著陸經度偏差,但無法實現定點著陸。
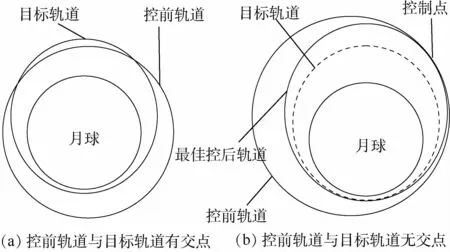
圖4 環月降軌控制解示意圖Fig.4 Schematic diagram of lunar orbit descent control solution
3 仿真算例
以“嫦娥四號”月球探測器仿真數據為例。探測器著陸月面的任務要求為:環月降軌控制在2018-12-30實施,標稱動力下降點時間為2019-01-03T10:15:00,高 度 為15 km,月 面 經 度 為175.97°,月面緯度為-30.67°。
針對標稱環月軌道和+、-偏差環月軌道,分別進行定時定點月面著陸、定點月面著陸和目標緯度區域月面著陸3種控制策略的計算分析。
1)標稱環月軌道
探測器標稱環月軌道為(月心J2000慣性系):第191圈,2018-12-29T07:00:00,a=1840.068 km,e=0.010,i=97.453°,Ω=57.603°,ω=3.214°,f=339.783°。
探測器軌道攝動考慮地球引力場JGM-3模型32×32階次、月球引力場GL0420A模型100×100階次、太陽質點引力和光壓攝動。環月降軌控制為第205圈,動力下降控制為第256圈。
計算收斂門限為:動力學下降點時間偏差小于0.1 s,月面經度偏差小于0.01°。
表1給出了標稱環月軌道條件下環月降軌控制實現月面著陸的狀態參數和控制參數。表中:TP1表示定時定點月面著陸的第1組解,TP2表示定時定點月面著陸的第2組解,P表示定點月面著陸,LAT表示目標緯度區域月面著陸。每一組著陸方式給出了初值計算和精確迭代2組狀態用于比較。ψ表示控制脈沖的偏航角,θ表示控制脈沖的俯仰角,A表示修正的目標半長軸,ΔT表示動力下降點時間差,λ表示動力下降點實際經度,T表示軌道控制時刻,Δv表示速度脈沖大小。
表1表明:①標稱環月軌道條件下,初始軌道與目標軌道存在交點,環月降軌控制可實現定時定點月面著陸。具有2組控制點,位于軌道拱點的兩邊;2組控制點俯仰角絕對值約為163°,正負號相反,2組控制點偏航角基本一致,第1組略小;2組控制點相距較近,時間相差約4.5 min;第1組控制量略小于第2組。動力下降點時間偏差小于0.1 s,月面經度滿足要求。②按照定點著陸方式控制時,取第1組控制點。俯仰角為163.52°,偏航角為0°,控制量為23.187m/s,略小于定時定點著陸的控制量。動力下降點時間偏差約0.15 s,月面經度滿足要求。③按照目標緯度區域著陸方式控制時,取第1組控制點。俯仰角為180°,偏航角為0°,控制量為22.535m/s,為著陸方式中的最小控制量。動力下降點時間偏差約0.27 s,月面經度滿足要求。該方式的控制計算結果為定時定點月面著陸或定點月面著陸的初值計算結果。
2)-偏差環月軌道
給標稱環月軌道根數要素a、i、Ω、ω施加偏差。-偏差環月軌道的偏差設置為:Da=-2000m,Di=-0.02°,DΩ=+0.02°,Dω=-0.02°。
表2給出了-偏差環月軌道條件下環月降軌控制實現月面著陸的狀態參數和控制參數。
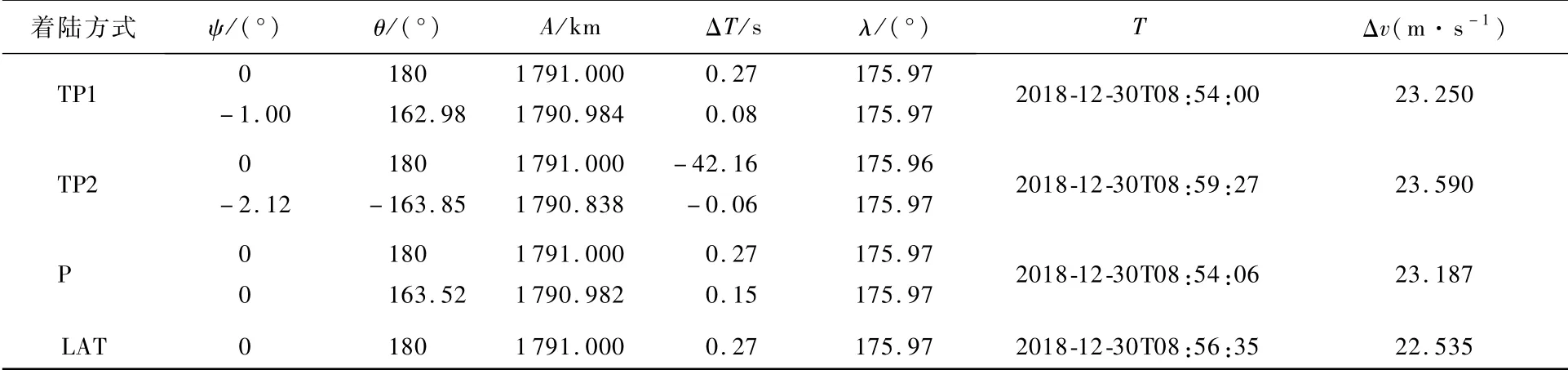
表1 標稱環月軌道的環月降軌控制參數Table 1 Parameters of lunar orbit descent control for nominal orbit
表2表明:①-偏差環月軌道條件下,初始軌道與目標軌道存在交點,環月降軌控制仍可實現定時定點月面著陸。相比標稱環月軌道,2組控制點距離軌道拱點略遠,時間相差約13.5min,俯仰角絕對值變小,約140°~145°;偏航角變大,分別為-3.19°和14.57°。 -偏差環月軌道定時定點月面著陸的控制量大于標稱環月軌道的控制量。②按照定點月面著陸方式控制,取第2組控制點。俯仰角為136.17°,偏航角為0°,控制量為26.699m/s,略小于定時定點月面著陸的控制量。動力下降點時間偏差約-277.74 s,月面經度滿足要求。③按照目標緯度區域著陸方式控制,取第1組控制點。俯仰角為180°,偏航角為0°,控制量為22.101m/s,為著陸方式中的最小控制量。動力下降點時間偏差約535.61 s,月面經度偏差約0.12°。
3)+偏差環月軌道
+偏差環月軌道的偏差設置為:Da=+2000m,Di=+0.02°,DΩ=-0.02°,Dω=+0.02°。
表3給出了+偏差環月軌道條件下環月降軌控制實現月面著陸的狀態參數和控制參數。
表3表明:①+偏差環月軌道條件下,初始軌道與目標軌道無交點,因此,環月降軌控制無法實現定時定點月面著陸和定點月面著陸。②按照目標緯度區域月面著陸方式控制時。俯仰角為180°,偏航角為0°,控制量為22.970m/s。動力下降點時間偏差約355.30 s,月面經度偏差約0.08°。
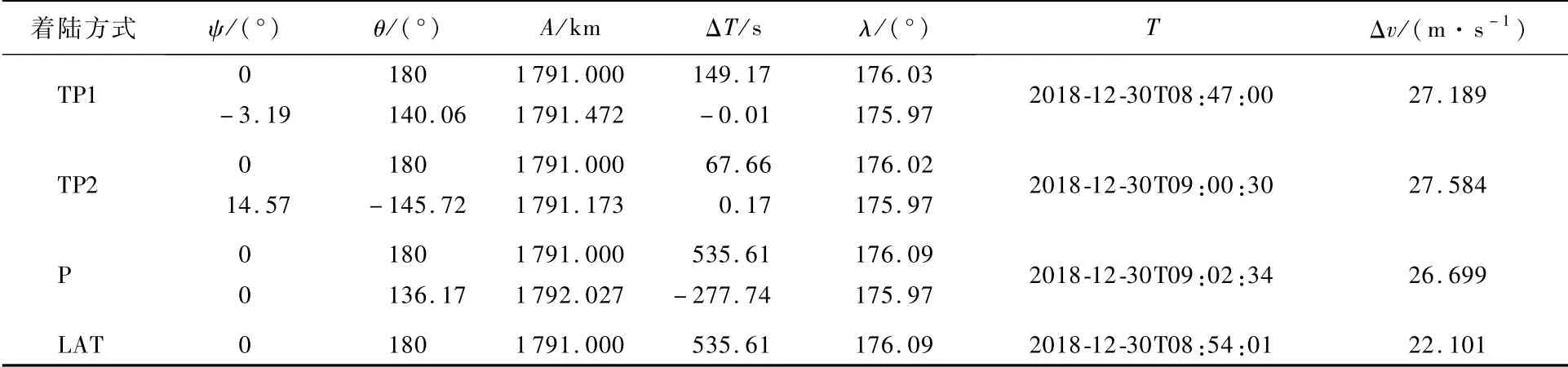
表2 -偏差環月軌道的環月降軌控制參數Table 2 Parameters of lunar orbit descent control for negative deviation orbit

表3 +偏差環月軌道的環月降軌控制參數Table 3 Parameters of lunar orbit descent control for positive deviation orbit
4 結 論
本文針對環月降軌實現月面著陸的控制策略進行了研究。根據環月降軌單脈沖控制變量的3種組合,建立了環月降軌3種軌道控制策略,實現了定時定點/定點/目標緯度區域的3種月面著陸方式。通過標稱環月軌道/-偏差環月軌道/+偏差環月軌道的計算分析,可得如下結論:
1)環月軌道與動力下降軌道具有交點時,在一定的軌道偏差范圍內,通過環月降軌軌道控制,能夠定時定點到達動力下降點,實現定時定點月面著陸,或者定點到達動力下降點,實現定點月面著陸。
2)環月軌道與動力下降軌道具有交點時,控制點具有雙解,在不同軌道位置的法向脈沖修正軌道平面偏差的控制量不同,可根據控制量優化選擇控制點。
3)環月軌道與動力下降軌道沒有交點時,環月降軌控制只能實現目標緯度區域的月面著陸。
4)通常情況下,定時定點著陸、定點著陸、目標區域著陸的3種著陸方式,環月降軌的控制量依次減少。
5)若保證實現定時定點月面著陸,可考慮通過環月軌道修正進行偏置,使得環月軌道高度低于環月降軌控制點高度,保證環月軌道與動力下降軌道具有交點。
本文的環月降軌軌道控制策略可應用于月球著陸、月球采樣返回及載人登月等實施月面著陸任務的軌道控制。
猜你喜歡
艦船科學技術(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
山東工業技術(2016年15期)2016-12-01 05:31:37
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(2016年5期)2016-03-22 01:09:38
電機與控制應用(2015年2期)2015-03-01 03:49:24
電測與儀表(2014年24期)2014-04-09 11:35:36