基于Unity3D的無人機蜂群作戰(zhàn)可視化研究
2020-02-14 06:03:57王婧羽胡曉陽
科技創(chuàng)新與應(yīng)用 2020年2期
王婧羽 胡曉陽

摘 ?要:對于目前虛擬現(xiàn)實技術(shù)在軍事領(lǐng)域中的廣泛應(yīng)用,通過使用三維交互程序開發(fā)引擎Unity3D在計算機平臺上開發(fā)了無人機蜂群作戰(zhàn)場景可視化的仿真應(yīng)用,實現(xiàn)了該作戰(zhàn)過程中逼真的效果。結(jié)果表明該系統(tǒng)能增加分析人員的真實感,在一定程度上降低了實驗成本。
關(guān)鍵詞:虛擬現(xiàn)實;Unity3D;無人機;蜂群作戰(zhàn);可視化
中圖分類號:U675.79 文獻標(biāo)志碼:A ? ? ? ? 文章編號:2095-2945(2020)02-0013-03
Abstract: For the wide application of virtual reality technology in the military field, the simulation application of UAV swarm combat scene visualization is developed on the computer platform by using the three-dimensional interactive program development engine Unity3D, and the realistic effect in the combat process is realized. The results show that the system can increase the reality of analysts and reduce the experimental cost to a certain extent.
Keywords: virtual reality; Unity3D; UAV; bee swarm warfare; visualization
隨著現(xiàn)代科學(xué)技術(shù)的發(fā)展,控制技術(shù)、計算機技術(shù)、電子技術(shù)、航空技術(shù)等一系列高新技術(shù)出現(xiàn)了日新月異的變化,無人機應(yīng)運而生,并逐步作為一種現(xiàn)代化的武器裝備應(yīng)用于現(xiàn)代高技術(shù)局部戰(zhàn)爭中[1],面對日益多樣化的復(fù)雜任務(wù)和高度復(fù)雜的戰(zhàn)場環(huán)境,無人機蜂群作戰(zhàn)也逐漸從理論變?yōu)榱爽F(xiàn)實。
Unity3D游戲引擎是近幾年非常流行的一個3D游戲開發(fā)引擎。該軟件可以實現(xiàn)三維場景的搭建,并進行場景的交互[2]。因此,提出Unity3D為主要開發(fā)工具的無人機蜂群作戰(zhàn)場景可視化的設(shè)計思路。
為實現(xiàn)一定逼真度并兼顧系統(tǒng)性能要求,可以從以下兩個方面加以考慮:(1)模型在具備一定逼真度基礎(chǔ)上,精細(xì)程度不能太高,可以采用把場景中的各實體由簡化處理的模型來模擬。(2)選擇格式匹配的紋理貼圖及合適的紋理映射方式,提高實體和戰(zhàn)場環(huán)境仿真的逼真度。
為實現(xiàn)戰(zhàn)斗場景可視化,利用3DMax建立飛機、無人機和戰(zhàn)場地形模型;利用Unity3D搭建模型;利用C#編程開發(fā)出戰(zhàn)斗場景可視化系統(tǒng)。
1 仿真工具
目前三維交互建模工具較多,其中3DMax是市場上較為主流的三維建模、動畫及渲染解決方案之一,被廣泛應(yīng)用在視覺效果、角色動畫及游戲開發(fā)等的領(lǐng)域內(nèi)[3]。
Unity實時開發(fā)平臺,打造面向游戲、汽車、交通運輸、電影、動畫、建筑、工程等領(lǐng)域的3D、2D VR和AR可視化效果,是一個全面整合的專業(yè)游戲引擎。其編輯器可運行在Windows、Linux、Mac OS X下,可發(fā)布項目至Windows、Mac、Wii、iPhone、WebGL、Windows phone 8和Android平臺[4]。也可以利用Unity web player插件發(fā)布網(wǎng)頁游戲,支持Mac和Windows的網(wǎng)頁瀏覽。基于這種跨平臺開發(fā)的思考,選用該工具作為作戰(zhàn)場景模擬再現(xiàn)的主要開發(fā)工具。
2 創(chuàng)建場景
2.1 圖片處理
搜集有三視圖的飛機、無人機和坦克模型圖,在Photoshop里進行處理,用鋼筆工具修剪圖片的三視圖,按一定方向擺放三視圖后并存儲,接著使用Photoshop里的銳化工具增加模型紋理使之更加清晰便于后期處理。
整理素材,在3ds Max中導(dǎo)入三視圖,搭建模型,再利用占展UV貼圖給飛機模型貼圖并渲染,導(dǎo)出文件。
2.2 搭建地形模型
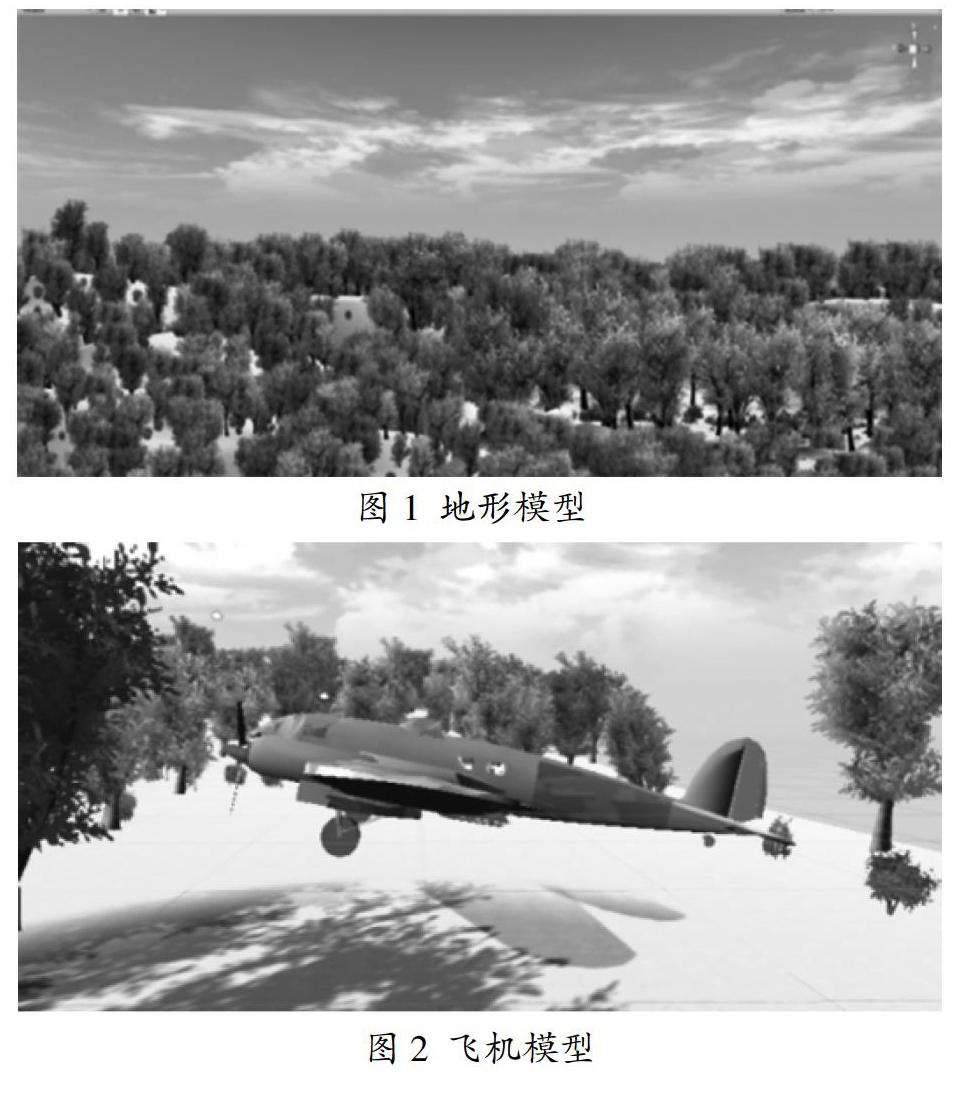
設(shè)置地形系統(tǒng),Unity3D內(nèi)置了一套強大的山體系統(tǒng)(也叫地形系統(tǒng))。在Unity3D中創(chuàng)建一個新的場景,通過地形屬性面板畫出山體形狀并調(diào)整山體大小,選擇貼圖紋理添加地形貼圖后繪制山體貼圖。使用畫樹和畫草工具為地形增色[5]。設(shè)置天空盒紋理,添加合適的燈光,完成地形創(chuàng)建如圖1所示。
2.3 搭建飛機模型
將從3ds Max中導(dǎo)出的飛機模型文件拖拽到Unity3D的Project面板中,然后將飛機模型拖拽到建好的場景中,命名為Plane,調(diào)整模型尺寸。飛機初始狀態(tài)為略傾斜,并且在地面等待起飛,因此將飛機設(shè)定一定角度旋轉(zhuǎn),完成后的飛機模型如圖2所示。
2.4 搭建無人機模型
將從3ds Max中導(dǎo)出的無人機模型文件拖拽到Unity3D的Project面板中,然后將無人機模型拖拽到建好的場景中,命名為Drone,調(diào)整模型尺寸,所建無人機模型將如圖3所示。
由于無人機起初與飛機同步運動,體現(xiàn)飛機裝載著無人機,因此將無人機與飛機建立父子關(guān)系,飛機為父物體,無人機為子物體。
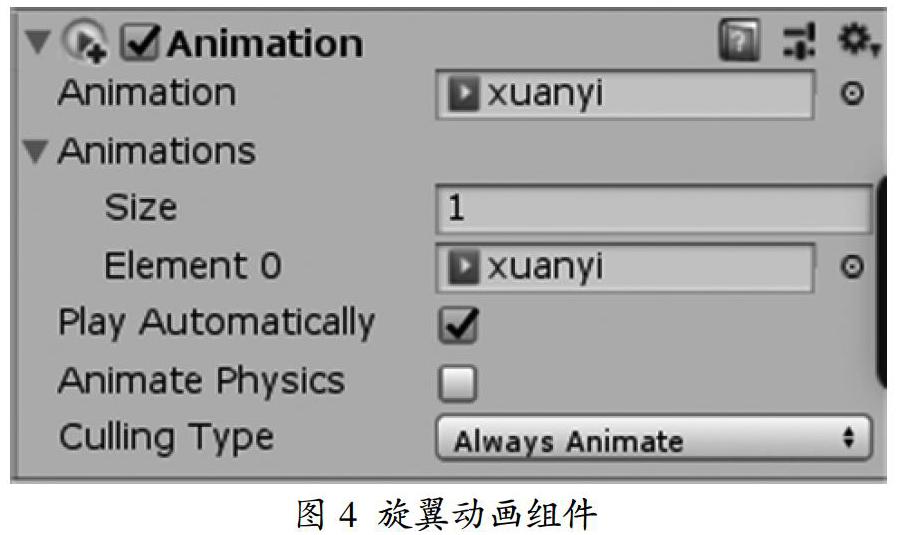
為達到比較真實的效果,在無人機的旋翼上添加Animation組件,錄制旋翼旋轉(zhuǎn)動畫xuanyi,添加到Animation組件中如圖4所示,提供無人機旋翼動畫的功能。
2.5 搭建坦克模型
與搭建其他模型相同步驟,將坦克模型加到場景中作為無人機群攻擊的目標(biāo)點,完成后的模型如圖5所示。
3 實現(xiàn)過程
3.1 飛機飛行控制
選擇plane對象,添加Script組件,編寫c#代碼,腳本需求包括以下四方面:(1)飛機以固定速度起飛;(2)飛機以設(shè)定加速度做加速向前運動到速度為指定速度;(3)飛機到達特定位置時,通過外界輸入空格命令,投放無人機;(4)投放無人機后飛機回到起飛點。
飛機飛行控制基本實現(xiàn)思路:定義float型數(shù)據(jù)飛機的上升速度、向前飛的實際速度、加速度與飛行時間,飛機以指定上升速度上升同時旋轉(zhuǎn)回正常飛行角度,上升指定時間后飛機做勻加速運動,到指定速度后勻速前進,飛行過程利用transform.Translate函數(shù)實現(xiàn);此時外界可以輸入命令,飛機通過Input.GetKey函數(shù)獲取外界命令,之后飛機通過使用transform.DetachChildren函數(shù)解除與無人機的父子關(guān)系,達到投放無人機的目的。投放無人機后,飛機飛回原地。
將上述邏輯通過腳本代碼實現(xiàn),即飛機模型所掛在的Script腳本組件的內(nèi)容。
3.2 無人機蜂群控制
3.2.1 無人機個體行為控制
模擬無人機蜂群作戰(zhàn),要先給每個無人機賦予各自的行為模式:(1)避免無人機之間相互碰撞——分離;(2)向目標(biāo)方向移動——隊列;(3)向無人機的領(lǐng)航者位置移
動——聚集[6]。將無人機模型預(yù)制,復(fù)制多個預(yù)制體,構(gòu)成無人機群,在無人機群的個體上掛載Script組件,控制無人機蜂群飛行過程。
代碼實現(xiàn)思路:定義移動速度、旋轉(zhuǎn)速度、隨機力的頻率及大小、向心力、分離力、規(guī)避力的大小、追隨速度及半徑等個體屬性;由平均位置來計算無人機的聚合,判斷規(guī)避半徑與個體間的距離來改變推力,同時還要與領(lǐng)航無人機保持一定的距離;計算與無人機領(lǐng)航者的相對速度后調(diào)整速度由領(lǐng)航者帶領(lǐng)飛向目標(biāo)點;為產(chǎn)生隨機力,還需定義一個方法IEnumerator UpdateRandom,通過隨機返回單位球體類一點坐標(biāo)來更新隨機力,依據(jù)隨機頻率在一定時間分為類變化隨機力。
將此思路編為c#代碼命名為Flock,掛在單個無人機上,控制每個無人機個體行為,F(xiàn)lock組件視圖如圖6所示。
3.2.2 無人機領(lǐng)航者控制
創(chuàng)建無人機領(lǐng)航者及群體控制器,這個類會決定飛行的方向,引領(lǐng)其他無人機向目標(biāo)飛行。選擇Drone對象,添加Script腳本組件后編寫代碼。
定義偏移大小、范圍、領(lǐng)航無人機速度、加速度、對目標(biāo)位置的誤差值等屬性,定義目標(biāo)位置,用Transform[]target字符串來實現(xiàn)。開始時,飛機接收命令與無人機解除父子關(guān)系,無人機同樣接收命令,通過if語句與Transform.parent函數(shù)判斷是否與飛機解除了父子關(guān)系。當(dāng)確定已解除父子關(guān)系后,無人機尋找并飛向目標(biāo)。為使無人機可以搜索指定目標(biāo),需定義尋找目標(biāo)的方法,命名為Move To,實現(xiàn)思路為:首先使用字符串string類型定義目標(biāo),定義float類型目標(biāo)數(shù)值;然后通過transform.LookAt函數(shù)使無人機朝向目標(biāo)點,同樣通過transform.Translate函數(shù)使無人機移動,最后通過if語句判斷無人機是否到達指定目標(biāo)。
將上述邏輯編輯成c#腳本,命名為FlockController,掛在領(lǐng)航無人機對象上實現(xiàn)需求,組件視圖如圖7所示。
4 運行驗證
無人機蜂群作戰(zhàn)場景可視化運行截圖如圖8所示。
5 結(jié)束語
Unity3D引擎在作戰(zhàn)場景可視化系統(tǒng)開發(fā)上的具有效率高、逼真度和可信度高、能滿足系統(tǒng)仿真實時性等明顯優(yōu)勢。直接運用編輯器自帶的功能接口和組件就能夠快速得到模擬作戰(zhàn)過程所需要的無人機間碰撞檢測等復(fù)雜功能。目前其在無人機蜂群作戰(zhàn)模擬方面的應(yīng)用瓶頸在于多無人機之間的通信處理問題。
參考文獻:
[1]沈林成,牛軼峰,朱華勇.多無人機自主協(xié)同控制理論與方法[M].北京:國防工業(yè)出版社,2013:1.
[2]仇樂.基于Unity3D的船舶航跡三維顯示系統(tǒng)[J].船舶科學(xué)技術(shù),2019(41):145.
[3]李志,李艦,付玉峻.基于Unity3D的某型地空導(dǎo)彈戰(zhàn)斗場景可視化研究[J].電腦編程技巧與維護,2016(03):71.
[4]姜子奇.基于Unity3D的礦山虛擬采礦技術(shù)研究[J].礦業(yè)工程,2019(17):60.
[5]羅培羽.Unity3D網(wǎng)絡(luò)游戲?qū)崙?zhàn)[M].北京:機械工業(yè)出版社,2016:10-12.
[6]王洪源,陳慕羿,華宇寧,等.Unity3D人工智能編程精粹[M].北京:清華大學(xué)出版社,2014:5.
猜你喜歡
北京測繪(2022年6期)2022-08-01 09:19:06
師道·教研(2022年1期)2022-03-12 05:46:47
云南化工(2021年8期)2021-12-21 06:37:54
北京測繪(2021年7期)2021-07-28 07:01:18
海洋信息技術(shù)與應(yīng)用(2020年1期)2020-06-11 12:43:56
傳媒評論(2019年4期)2019-07-13 05:49:14
人間(2016年26期)2016-11-03 17:52:40
中國科技博覽(2016年22期)2016-11-01 18:10:31
科技視界(2016年22期)2016-10-18 14:30:27
企業(yè)導(dǎo)報(2016年9期)2016-05-26 20:58:26