基于支持度的橢球擬合微機(jī)械電子系統(tǒng)加速度計(jì)現(xiàn)場(chǎng)標(biāo)定方法研究
2020-02-18 03:52:14周泉姚敏立沈曉衛(wèi)
兵工學(xué)報(bào) 2020年1期
關(guān)鍵詞:方法
周泉,姚敏立,沈曉衛(wèi)
(火箭軍工程大學(xué),陜西 西安 710025)
0 引言
隨著微機(jī)械電子系統(tǒng)(MEMS)加速度計(jì)的不斷發(fā)展,越來(lái)越多的慣性測(cè)量系統(tǒng)開(kāi)始采用MEMS加速度計(jì)作為其主要部件,而MEMS加速度計(jì)的性能好壞直接影響著系統(tǒng)測(cè)量精度。因此,MEMS加速度計(jì)的測(cè)試標(biāo)定已經(jīng)成為系統(tǒng)投入使用前必不可少的環(huán)節(jié)。相比于傳統(tǒng)的加速度計(jì),MEMS加速度計(jì)具有獨(dú)特的優(yōu)勢(shì),如體積小、質(zhì)量輕、價(jià)格低等優(yōu)點(diǎn)[1],但是仍然有一些缺陷,存在其參數(shù)會(huì)隨著系統(tǒng)的使用或者存放時(shí)間的推移而變化的問(wèn)題。最為明顯的就是MEMS加速度計(jì)的零位漂移,即標(biāo)定相隔時(shí)間越長(zhǎng),加速度計(jì)的零漂變化就越明顯[2]。未來(lái)戰(zhàn)場(chǎng)錯(cuò)綜復(fù)雜,不可能存在大量時(shí)間或者使用高精度設(shè)備去對(duì)需要重新標(biāo)定的MEMS加速度計(jì)進(jìn)行校正,因此,需要一種不依賴精密儀器、簡(jiǎn)易高效的現(xiàn)場(chǎng)快速標(biāo)定方法。
國(guó)內(nèi)外已有很多學(xué)者對(duì)現(xiàn)場(chǎng)標(biāo)定方法進(jìn)行了深入研究。2017年,Nadeau等[3]提出使用靜態(tài)重力對(duì)系統(tǒng)中傳感器的加速度計(jì)進(jìn)行現(xiàn)場(chǎng)標(biāo)定的方法,該方法簡(jiǎn)單易行,通用性較好,但沒(méi)有考慮到其他維空間,因此系統(tǒng)在復(fù)雜環(huán)境中工作時(shí)精度起伏較大。2018年,Kesaniemi等[4]提出了超橢圓體的直接最小二乘擬合法。該算法通過(guò)在適當(dāng)?shù)亩渭s束條件下最小化代數(shù)距離進(jìn)行擬合,詳細(xì)地介紹了現(xiàn)有橢圓和三維橢球的特定擬合方法,但是其精度并沒(méi)有太大變化。同年,劉宇等[5]提出了一種基于橢球擬合的微慣性測(cè)量單元(MIMU)系統(tǒng)自標(biāo)定方法,該方法通過(guò)多次擬合方式進(jìn)行總體標(biāo)定,雖然精度提高了3個(gè)數(shù)量級(jí),但是用時(shí)較長(zhǎng),算法復(fù)雜,不適合工程實(shí)踐。
為了滿足現(xiàn)場(chǎng)標(biāo)定快捷、高效的需求,本文提出一種改進(jìn)的橢球擬合標(biāo)定方法,即運(yùn)用支持度的概念,使標(biāo)定數(shù)據(jù)更加精細(xì)化,并結(jié)合橢球現(xiàn)場(chǎng)標(biāo)定法實(shí)現(xiàn)了現(xiàn)場(chǎng)快速標(biāo)定。
1 橢球擬合標(biāo)定原理
在沒(méi)有誤差的理想狀態(tài)下,MEMS三軸加速度計(jì)測(cè)量值的矢量和等于其當(dāng)?shù)氐闹亓铀俣瘸A縢.因此,理想相互垂直的三軸加速度計(jì)任意旋轉(zhuǎn)多個(gè)角度,其測(cè)得的數(shù)據(jù)點(diǎn)集合在直角坐標(biāo)系中的軌跡是一個(gè)標(biāo)準(zhǔn)的圓球面。但是在實(shí)際的測(cè)量工作過(guò)程中,MEMS加速度計(jì)會(huì)存在零位漂移誤差、標(biāo)度因數(shù)誤差和交叉耦合誤差等問(wèn)題,在這些誤差的影響下,會(huì)使標(biāo)準(zhǔn)的理想圓球面產(chǎn)生一些微小的畸形而變成橢球面[6]。針對(duì)這些誤差特性需要建立數(shù)學(xué)模型來(lái)進(jìn)行誤差補(bǔ)償[7]:
(1)
式中:G表示加速度計(jì)實(shí)際輸出值組成的矩陣;K表示誤差系數(shù)組成的矩陣;g0表示加速度計(jì)零位漂移組成的矩陣;G0為理想狀態(tài)下輸出值組成的矩陣。
對(duì)(1)式中G0取模的平方,可得
‖G0‖2=(G-g0)T(K-1)TK-1(G-g0).
(2)
因?yàn)闄E球曲面是一種特殊的二次曲面,所以設(shè)該曲面方程為
F(ζ,ψ)=ζTψ=
ax2+by2+cy2+2dxy+2exz+
2fyz+2px+2qy+2rz+v=0,
(3)
式中:ζ=[a,b,c,d,e,f,p,q,r,v]T為橢球的曲面參數(shù)向量,a、b、c、d、e、f、p、q、r、v為曲面方程的參數(shù)變量;ψ=[x2,y2,z2,2xy,2yz,2x,2y,2z,1]為運(yùn)算組合向量,x2、y2、z2、2xy、2yz、2x、2y、2z為該運(yùn)算組合向量的參數(shù)變量。
橢球體現(xiàn)場(chǎng)標(biāo)定算法的核心是通過(guò)采集大量的數(shù)據(jù)進(jìn)行橢球擬合,從而計(jì)算出最優(yōu)的一組橢球參數(shù),使得采集的數(shù)據(jù)與橢球的中心距離達(dá)到最小值[8]。而最佳的擬合橢球曲面F(ζ,ψ)的矢量形式為
(X-X0)TA(X-X0)=1,
(4)
(5)
(6)
式中:X為擬合橢球曲面上的任意點(diǎn);X0為理想橢球面中心點(diǎn)的坐標(biāo);A為擬合后橢球體的參數(shù)矩陣,其大小正負(fù)與橢球體的半徑和其旋轉(zhuǎn)的角度有關(guān)[9]。結(jié)合誤差模型和橢球最佳擬合曲面的矢量公式,可得
(7)
(8)
橢球擬合的基本原則就是使數(shù)據(jù)到橢球表面的平方和最小,但這個(gè)原則不能確保每一個(gè)數(shù)據(jù)組合都在橢球的曲面上,因?yàn)閿?shù)據(jù)組合也有可能是在圓錐曲面上,所以需要引進(jìn)橢球曲面的約束條件,確保曲面為橢球面,這個(gè)約束條件是基于最小二乘法的橢球擬合算法獲得。
令u=ab+bc+ac-f2-e2-d2,l=a+b+c,若4u-l2>0,則其形成的曲面必為橢球曲面[10]。結(jié)合橢球曲面的一般公式和橢球的約束條件,則有
(9)
又可以表示為
(10)
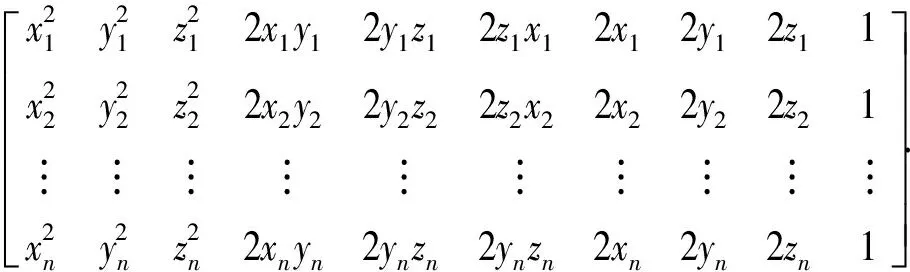
E=

(11)
式中:E為橢球二次曲面k組數(shù)據(jù)組成的系數(shù)矩陣。為通過(guò)結(jié)合橢球約束條件,把橢球擬合問(wèn)題轉(zhuǎn)化成為約束條件下求極值問(wèn)題,先對(duì)ETE進(jìn)行奇異值分解,再計(jì)算求解ETE的特征值和特征向量,最后對(duì)特征值和特征向量進(jìn)行反歸一化處理,轉(zhuǎn)化成橢球的標(biāo)準(zhǔn)形式,求解出橢球參數(shù)矩陣和橢球的幾何中心[11]。
2 基于支持度的橢球體法
第1節(jié)方法在對(duì)MEMS加速度計(jì)進(jìn)行現(xiàn)場(chǎng)標(biāo)定時(shí),由于現(xiàn)場(chǎng)環(huán)境復(fù)雜多樣,在采集各軸加速度計(jì)的輸出值時(shí),會(huì)采集到存在其他方向較大的加速度計(jì)數(shù)據(jù)值,而傳統(tǒng)的橢球擬合算法受其影響較大,擬合后得到的橢球參數(shù)向量誤差較大,導(dǎo)致標(biāo)定精度較低[11-12]。
為了解決這個(gè)問(wèn)題,本文創(chuàng)新性地引入支持度的概念,通過(guò)定義觀測(cè)值間的相互支持程度,把數(shù)據(jù)之間的關(guān)系和自身有用性程度量化,根據(jù)數(shù)據(jù)的關(guān)系及其有用程度進(jìn)行數(shù)據(jù)融合。對(duì)于那些誤差較大的采集值,經(jīng)算法計(jì)算得到它相應(yīng)的支持度會(huì)很小,支持度小意味著在數(shù)據(jù)融合時(shí)所占比例就會(huì)很小,這樣就能有效地解決這個(gè)問(wèn)題。實(shí)驗(yàn)表明,融合后的觀測(cè)值較原來(lái)觀測(cè)值精度提升了一倍,證明了經(jīng)過(guò)改進(jìn)后的算法,提高了橢球擬合的參數(shù)向量和校正矩陣的精度。
引入支持度的概念,對(duì)于兩個(gè)觀測(cè)值φ1和φ2:若φ1和φ2相差較大,則表明這兩個(gè)觀測(cè)值的相互支持程度很低,甚至相互背離;若φ1和φ2很接近,則表明這兩個(gè)觀測(cè)值相互支持程度較高,定義數(shù)據(jù)間的這種支持程度為支持度。本文采用分段支持的方法,即把采集的數(shù)據(jù)點(diǎn)進(jìn)行分段,每段再采用支持度融合方法。這樣就可以充分利用數(shù)據(jù)之間支持程度的關(guān)系去抑制誤差較大數(shù)據(jù),從而提高精度。將數(shù)據(jù)組分為n組,每組包含m個(gè)數(shù)據(jù),則第i組可以表示為
(12)
式中:Hi為第i組數(shù)據(jù)的支持度矩陣。
(13)
dij=|gi-gj|,i=1,2,3,…,m,j=1,2,3,…,m,
(14)
若i=j,則稱其為自支持度,若i≠j,則稱其為互支持度。
為解決觀測(cè)值量綱的影響,方便之后的數(shù)據(jù)處理,對(duì)觀測(cè)值之間的距離進(jìn)行標(biāo)準(zhǔn)化,取
j=1,2,3,…,m,i≠j.
(15)
根據(jù)高斯誤差理論[13-14],當(dāng)測(cè)量值服從正態(tài)分布時(shí),殘差落在3倍方差即[-3σ,3σ]區(qū)間的概率超過(guò)99.7%,落在此區(qū)間外的概率只有不到0.3%.因此,若是某個(gè)數(shù)據(jù)與其他數(shù)據(jù)是近似的,則此數(shù)據(jù)的殘差和應(yīng)落到這個(gè)區(qū)間,反之,若某數(shù)據(jù)與其他數(shù)據(jù)不近似,則該數(shù)據(jù)的殘差不在這個(gè)區(qū)間內(nèi)[15]。對(duì)第i行的支持度求均值為
(16)
每行的標(biāo)準(zhǔn)差為σi,則有
(17)
則該行的數(shù)據(jù)殘差為
(18)
現(xiàn)場(chǎng)標(biāo)定的原則是在保證一定精度的情況下,盡量節(jié)省時(shí)間。為了高效地進(jìn)行數(shù)據(jù)融合來(lái)減少融合時(shí)間,在數(shù)據(jù)處理上,盡可能使運(yùn)算簡(jiǎn)單,而階躍型支持度函數(shù)比一般支持度函數(shù)運(yùn)算都要簡(jiǎn)單快捷。如表1所示,階躍型函數(shù)可以節(jié)省1倍時(shí)間,因此選取階躍型支持度函數(shù)。將支持度函數(shù)列出為

(19)
(20)
(21)
式中:rij(1)和rij(2)為一般支持度函數(shù);rij為階躍型支持度函數(shù)。
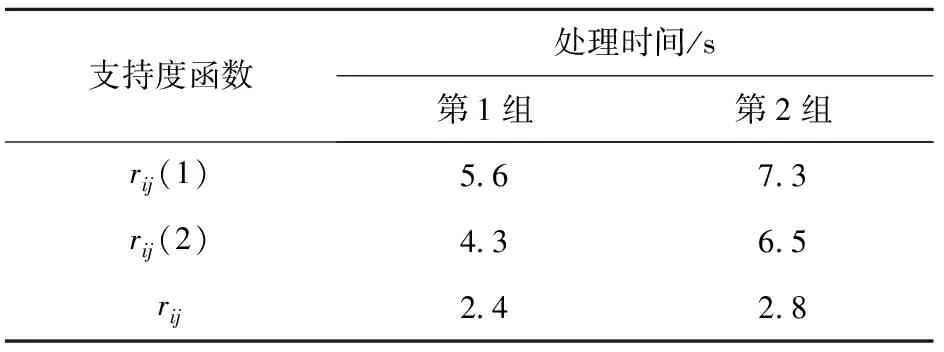
表1 處理時(shí)間統(tǒng)計(jì)
根據(jù)(21)式可得支持度矩陣為
(22)
根據(jù)(22)式可得觀測(cè)值的總支持度為
(23)
根據(jù)支持度的概念,支持度函數(shù)的第i行元素是第i個(gè)數(shù)據(jù)與其他數(shù)據(jù)相近程度的量化值。因此,第i行每個(gè)元素的量化值之和即為該數(shù)據(jù)總的支持度。其值越大,表示該觀測(cè)值與其他觀測(cè)值的相似程度就越大;相反,若量化值的和越小,表示該觀測(cè)值相似程度越差,背離了其他觀測(cè)值。對(duì)第i行的總支持度求均值得:
(24)
用判斷函數(shù)F(i)對(duì)第i行的支持度進(jìn)行判別:
(25)
式中:μ為調(diào)節(jié)系數(shù)。若F(i)為1則保留該數(shù)據(jù),若F(i)為0則去除該數(shù)據(jù)。通過(guò)F(i)判斷函數(shù)保留的數(shù)據(jù)重新組成一組數(shù)據(jù),進(jìn)行橢球擬合,其橢球系數(shù)為
E=
(26)
3 實(shí)驗(yàn)驗(yàn)證
為了驗(yàn)證所提算法的可行性和有效性,本文對(duì)實(shí)驗(yàn)室自主研發(fā)的MEMS加速度計(jì)進(jìn)行標(biāo)定,其性能指標(biāo)如表2所示。圖1為實(shí)驗(yàn)設(shè)備圖,數(shù)據(jù)采集軟件是使用美國(guó)微軟公司的Visual Studio 2013集成開(kāi)發(fā)環(huán)境,結(jié)合美國(guó)國(guó)家儀器公司的Measurement Studio插件設(shè)計(jì)的,接口采用串口數(shù)據(jù)輸出的模式。MEMS加速度計(jì)的標(biāo)定具體步驟為:
1)將安裝有MEMS加速度計(jì)的慣性導(dǎo)航系統(tǒng)緩慢以任意角度轉(zhuǎn)動(dòng),盡量使采集的數(shù)據(jù)點(diǎn)均勻分布在橢球面上。
2)打開(kāi)MEMS加速度計(jì)采集軟件,設(shè)置20 Hz的采集頻率,對(duì)MEMS加速度計(jì)進(jìn)行數(shù)據(jù)采集,再通過(guò)串口將采集數(shù)據(jù)上傳到上位機(jī)。
3)根據(jù)第2節(jié)的算法,利用數(shù)學(xué)計(jì)算軟件MATLAB對(duì)數(shù)據(jù)進(jìn)行處理,計(jì)算出橢球的誤差系數(shù)矩陣和零位漂移,對(duì)加速度計(jì)進(jìn)行誤差補(bǔ)償。
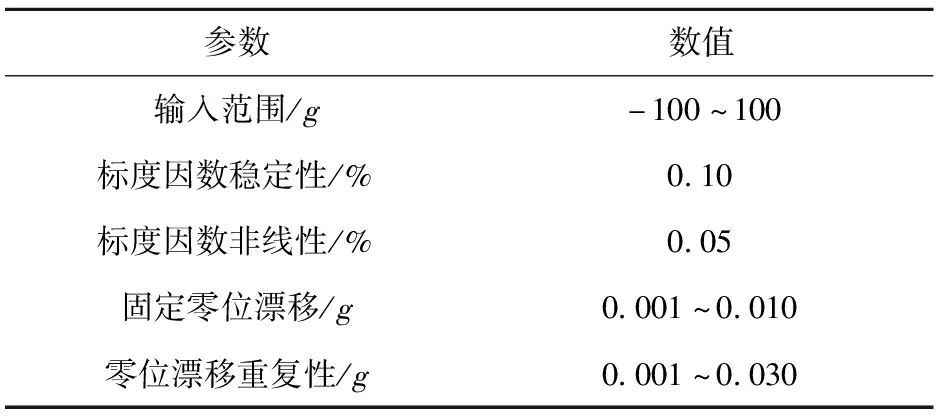
表2 加速度計(jì)的性能指標(biāo)
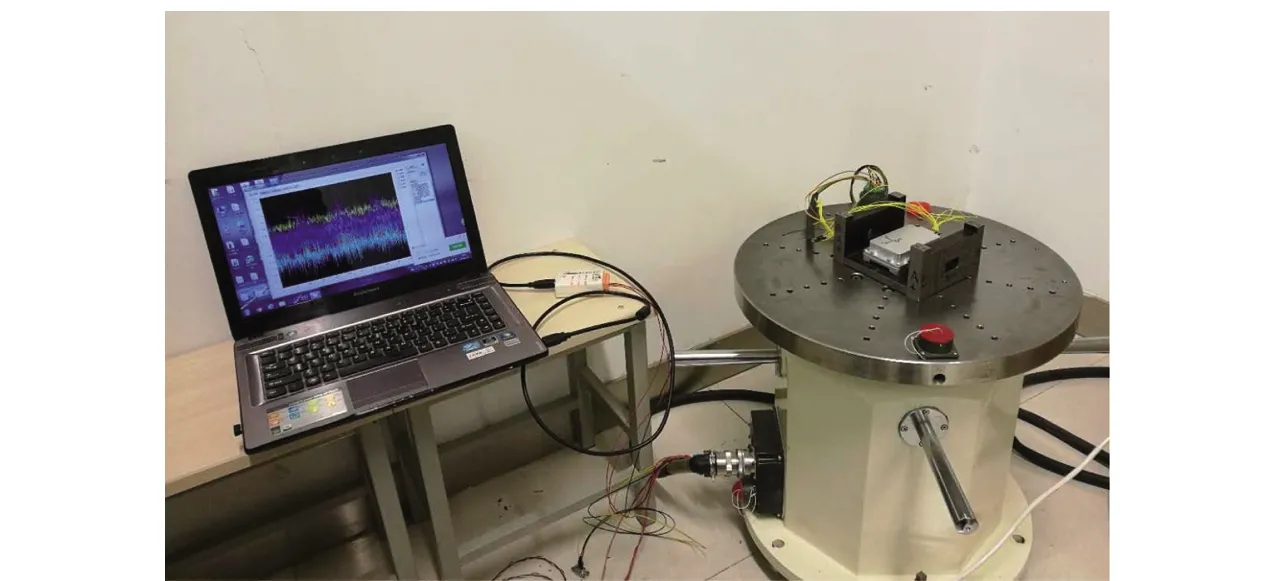
圖1 MEMS加速度計(jì)標(biāo)定
3.1 橢球擬合實(shí)驗(yàn)比較
為了深入分析擬合情況,通過(guò)與傳統(tǒng)橢球標(biāo)定法的性能比較,驗(yàn)證本文提出基于支持度的橢球標(biāo)定法性能的優(yōu)劣。首先用兩種算法對(duì)同一組MEMS加速度計(jì)采集的數(shù)據(jù)進(jìn)行MATLAB軟件擬合實(shí)驗(yàn),再建立擬合橢球面圖和殘差分析圖,如圖2、圖3、圖4所示。分析對(duì)原觀測(cè)值的擬合情況,最后通過(guò)表3記錄標(biāo)定后的均值及均方差,分析其性能的優(yōu)劣。
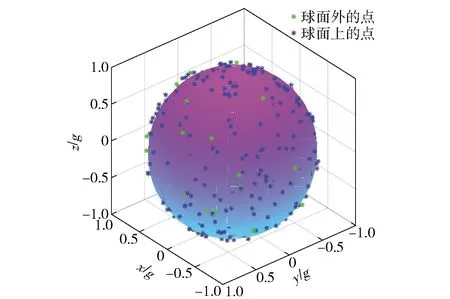
圖2 傳統(tǒng)橢球標(biāo)定法
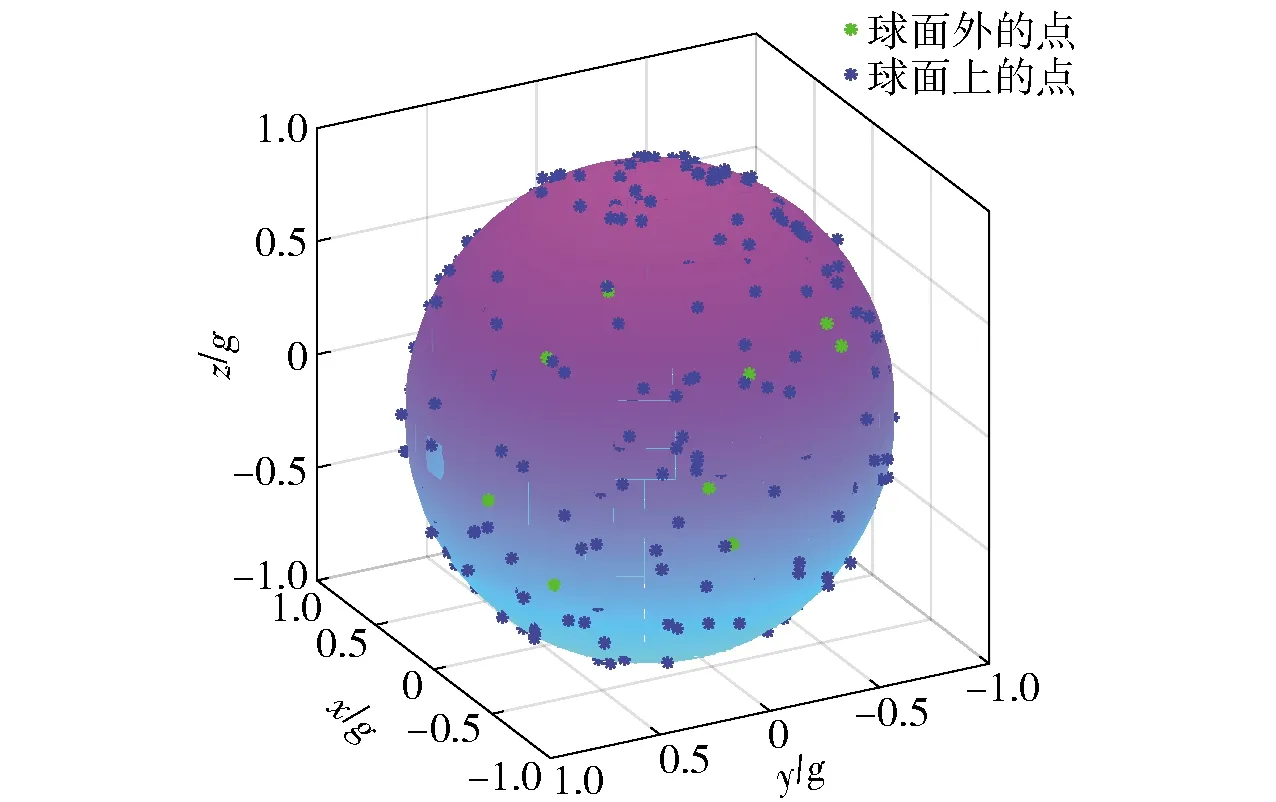
圖3 本文的橢球擬合標(biāo)定法
對(duì)比圖2和圖3可以發(fā)現(xiàn),改進(jìn)后橢球擬合標(biāo)定法橢球上的點(diǎn)分布得更加均勻。從表3中可以看出,雖然改進(jìn)后橢球球面上的點(diǎn)數(shù)減少了,但是橢球面上點(diǎn)數(shù)的比例卻提高了8%左右,說(shuō)明改進(jìn)后的算法橢球擬合程度更好。

圖4 兩種方法殘差的比較
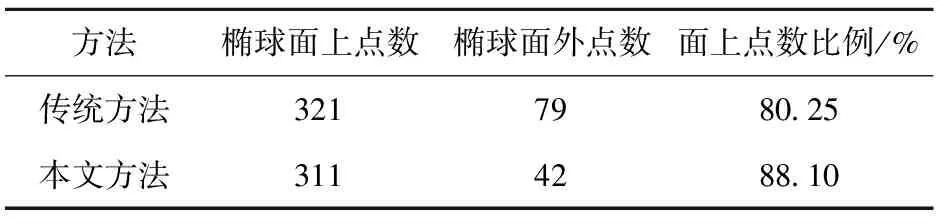
表3 點(diǎn)數(shù)統(tǒng)計(jì)
為了進(jìn)一步分析擬合穩(wěn)定程度,對(duì)兩種方法標(biāo)定后輸出殘差進(jìn)行比較,結(jié)果如圖4所示。殘差的具體計(jì)算方法為:連接數(shù)據(jù)點(diǎn)到橢球幾何中心,設(shè)這條連接線穿過(guò)橢球面的交點(diǎn)為M(xM,yM,zM),定義數(shù)據(jù)點(diǎn)P(xP,yP,zP)與M點(diǎn)的距離為橢球擬合殘差f(P,M),則
(27)
分析圖4,可以發(fā)現(xiàn)改進(jìn)后橢球擬合標(biāo)定法的殘差要比傳統(tǒng)方法波動(dòng)的幅度小,說(shuō)明改進(jìn)后橢球體法擬合的情況要比傳統(tǒng)橢球體法更加穩(wěn)定。
標(biāo)定誤差gv是指加速度計(jì)補(bǔ)償后的輸出gx(以x軸為例)與當(dāng)?shù)丶铀俣扔?jì)重力值的差值,即
gv=gx-g.
(28)
圖5為同一組數(shù)據(jù)分別采用傳統(tǒng)方法和改進(jìn)方法得出的標(biāo)定誤差曲線,可以看出改進(jìn)后的方法要比傳統(tǒng)方法的精度更高。表4為兩種方法得出的標(biāo)定誤差均值及均方差統(tǒng)計(jì)結(jié)果,可以發(fā)現(xiàn)改進(jìn)后的方法求得的數(shù)據(jù)更接近理論值,且精度提升了一倍。
3.2 時(shí)間累積標(biāo)定實(shí)驗(yàn)比較
由于MEMS加速度計(jì)的標(biāo)定參數(shù)會(huì)隨著時(shí)間發(fā)生一定的變化,為了分析其參數(shù)變化大小程度,需要進(jìn)行一個(gè)時(shí)間累積的標(biāo)定比較實(shí)驗(yàn)。首先把慣性導(dǎo)航系統(tǒng)放置在轉(zhuǎn)臺(tái)上的六面體中,再通過(guò)6位置高精度轉(zhuǎn)臺(tái)標(biāo)定法對(duì)慣性導(dǎo)航系統(tǒng)進(jìn)行標(biāo)定,得到其標(biāo)定參數(shù)(見(jiàn)表5)。
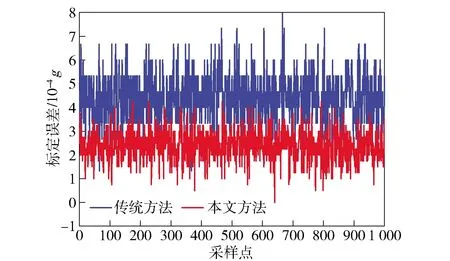
圖5 兩種方法標(biāo)定誤差的比較
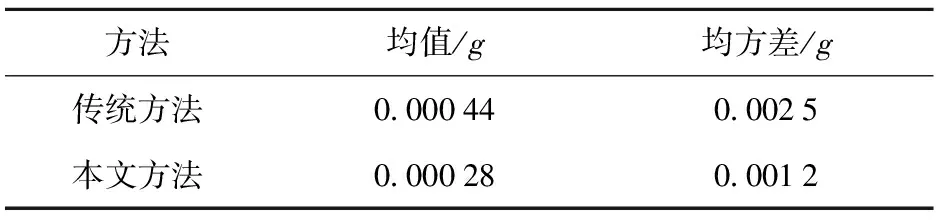
表4 兩種方法標(biāo)定誤差的均值及均方差統(tǒng)計(jì)
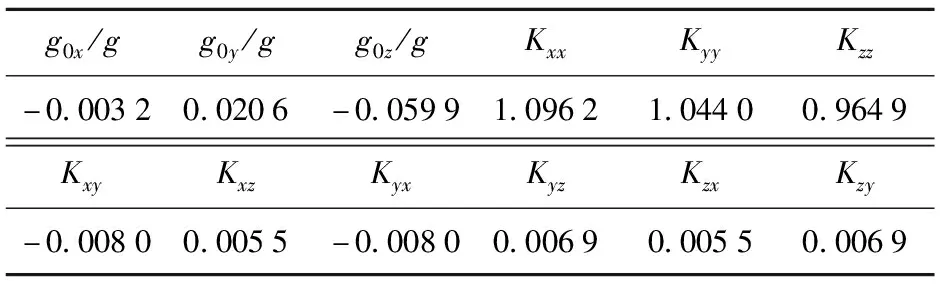
表5 前期轉(zhuǎn)臺(tái)的標(biāo)定參數(shù)
把慣性導(dǎo)航系統(tǒng)放置20 d后,將安裝加速度計(jì)的各軸分別垂直靜置在高精度轉(zhuǎn)臺(tái)上,通過(guò)采集軟件采集其重力加速度數(shù)據(jù),并上傳到上位機(jī)中,繼而再通過(guò)改進(jìn)后橢球擬合標(biāo)定法對(duì)其進(jìn)行現(xiàn)場(chǎng)標(biāo)定,得到其標(biāo)定參數(shù)。標(biāo)定完成后,用同樣方法獲得其他各軸的標(biāo)定參數(shù)(見(jiàn)表6)。
采集改進(jìn)后橢球擬合標(biāo)定法標(biāo)定的靜態(tài)數(shù)據(jù)后,對(duì)MEMS加速度計(jì)的標(biāo)定參數(shù)重置,再通過(guò)6位置高精度轉(zhuǎn)臺(tái)標(biāo)定法對(duì)MEMS加速度計(jì)進(jìn)行重新標(biāo)定,繼而獲得其各軸標(biāo)定參數(shù)(見(jiàn)表7)。
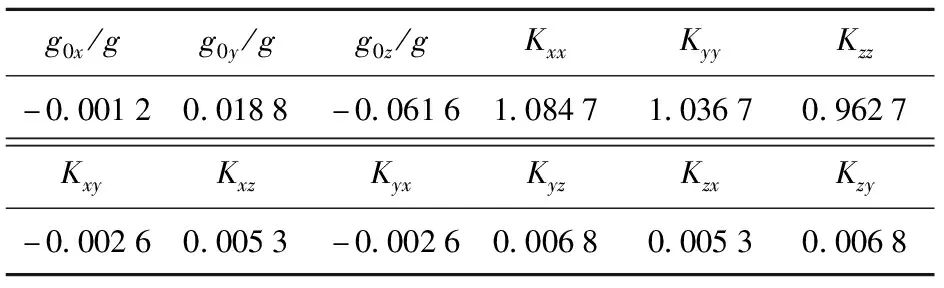
表6 20 d后本文方法的標(biāo)定參數(shù)
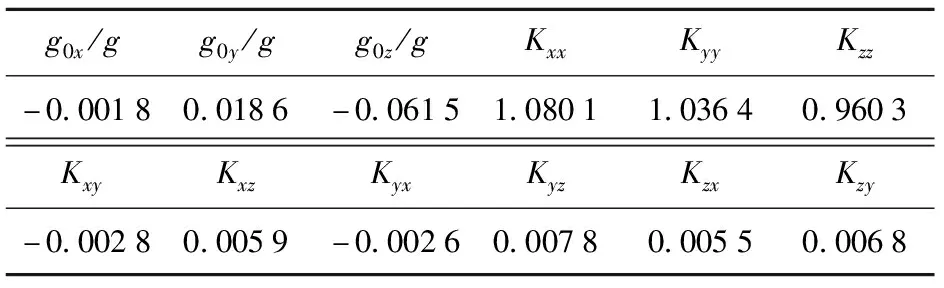
表7 20 d后轉(zhuǎn)臺(tái)的標(biāo)定參數(shù)
通過(guò)MATLAB軟件對(duì)3組采集的數(shù)據(jù)進(jìn)行處理(以x軸為例),如圖6所示。
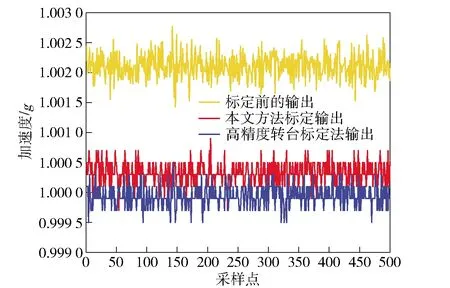
圖6 標(biāo)定后輸出比較
通過(guò)表8記錄6位置高精度轉(zhuǎn)臺(tái)標(biāo)定方法與本文標(biāo)定方法在標(biāo)定加速度計(jì)時(shí)使用的時(shí)間,為了時(shí)間記錄的準(zhǔn)確性,將3個(gè)加速度計(jì)按照1~3的序號(hào)進(jìn)行標(biāo)號(hào),記錄每種方法對(duì)這3個(gè)加速度計(jì)進(jìn)行標(biāo)定的時(shí)間。
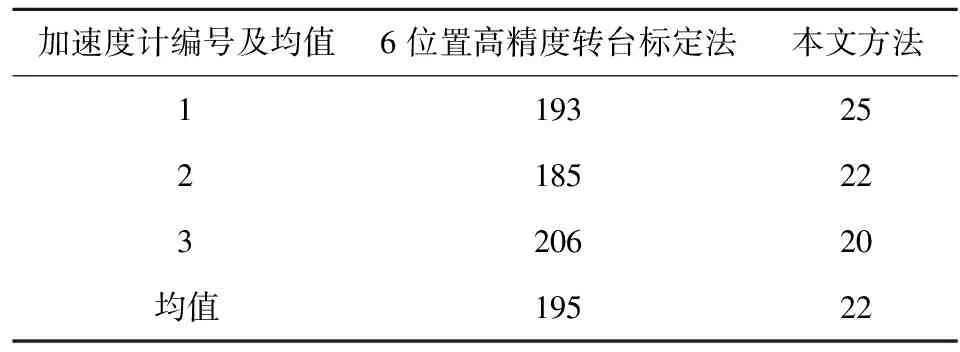
表8 標(biāo)定時(shí)間
綜合分析表5、表6、表7和表8,隨著時(shí)間的推移,加速度計(jì)的零位漂移波動(dòng)較大,標(biāo)度因數(shù)次之,而軸間交叉耦合因數(shù)變化最小。通過(guò)觀察圖6,可以清晰看出靜置20 d后MEMS加速度計(jì)的輸出精度明顯降低。本文標(biāo)定的加速度計(jì)與20 d后6位置高精度轉(zhuǎn)臺(tái)標(biāo)定的加速度計(jì)相比,精度雖然有所下降,但是精度下降幅度較小。此外,本文方法標(biāo)定的時(shí)間要比6位置高精度轉(zhuǎn)臺(tái)標(biāo)定的時(shí)間縮短7倍多。盡管本文方法比高精度轉(zhuǎn)臺(tái)標(biāo)定精度略有下降,但是本文方法的標(biāo)定精度比加速度計(jì)原始輸出的精度要高得多,并且有著其他方法無(wú)法比擬的優(yōu)勢(shì),如在任意環(huán)境下皆可進(jìn)行標(biāo)定,且標(biāo)定方法簡(jiǎn)單可靠。
4 結(jié)論
本文主要針對(duì)戰(zhàn)時(shí)或者復(fù)雜條件下高精度轉(zhuǎn)臺(tái)無(wú)法對(duì)裝備進(jìn)行標(biāo)定的情況下,創(chuàng)新性地提出一種便捷式現(xiàn)場(chǎng)標(biāo)定。采取基于支持度的橢球現(xiàn)場(chǎng)標(biāo)定,既能夠完成高精度轉(zhuǎn)臺(tái)在復(fù)雜環(huán)境下無(wú)法完成的標(biāo)定任務(wù),又能夠滿足這些設(shè)備的精度要求。通過(guò)兩組實(shí)驗(yàn)證實(shí)了其有效性和優(yōu)越性。主要得到如下結(jié)論:
1)通過(guò)擬合實(shí)驗(yàn)表明,改進(jìn)后橢球擬合標(biāo)定法能夠解決傳統(tǒng)橢球擬合標(biāo)定法異常值點(diǎn)的問(wèn)題,其擬合結(jié)果較傳統(tǒng)方法效果更好,且又能進(jìn)一步提高標(biāo)定精度。
2)通過(guò)時(shí)間累積標(biāo)定實(shí)驗(yàn)看出,本文提出的改進(jìn)后橢球擬合標(biāo)定法,既可以繼承原傳統(tǒng)方法的現(xiàn)場(chǎng)可操作性,又能夠解決該方法精度不足的問(wèn)題。實(shí)驗(yàn)表明,其標(biāo)定精度與高精度轉(zhuǎn)臺(tái)標(biāo)定相差不大,完全可以滿足設(shè)備需要的精度要求。綜上所述,改進(jìn)后橢球擬合標(biāo)定法的標(biāo)定時(shí)間較短、精度較高,在未來(lái)戰(zhàn)爭(zhēng)中具有一定的價(jià)值。
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(bào)(2021年2期)2021-05-25 02:07:46
中學(xué)生數(shù)理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(bào)(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長(zhǎng)指南(2015年7期)2015-08-11 15:03:12
小雪花·成長(zhǎng)指南(2015年4期)2015-05-19 14:47:56
- 兵工學(xué)報(bào)的其它文章
- 混凝土材料拉伸強(qiáng)度的應(yīng)變率強(qiáng)化效應(yīng)實(shí)驗(yàn)研究
- 基于極大似然法的高速無(wú)人艇操縱響應(yīng)模型參數(shù)辨識(shí)
- 基于神經(jīng)網(wǎng)絡(luò)的分布式被動(dòng)傳感器信息融合技術(shù)
- 基于插值短時(shí)分?jǐn)?shù)階傅里葉變換- 變權(quán)擬合的線性調(diào)頻信號(hào)參數(shù)估計(jì)
- 基于可觀測(cè)性分析的混合式慣性導(dǎo)航系統(tǒng)連續(xù)自標(biāo)定模型選擇
- 基于改進(jìn)型多項(xiàng)式混沌展開(kāi)的固體火箭發(fā)動(dòng)機(jī)藥柱低溫點(diǎn)火不確定性量化分析