基于神經(jīng)網(wǎng)絡(luò)的分布式被動(dòng)傳感器信息融合技術(shù)
2020-02-18 03:52:26李洪瑞
兵工學(xué)報(bào) 2020年1期
李洪瑞
(江蘇自動(dòng)化研究所,江蘇 連云港 222061)
0 引言
分布式傳感器探測(cè)信息融合系統(tǒng)的主要難點(diǎn)和關(guān)鍵之一在于信息關(guān)聯(lián),尤其對(duì)于被動(dòng)探測(cè)系統(tǒng),除了關(guān)聯(lián)問(wèn)題之外,各單傳感器探測(cè)系統(tǒng)還存在目標(biāo)估計(jì)與定位難題[1-3],被動(dòng)信息關(guān)聯(lián)和定位相互依賴和制約,也制約了對(duì)分布式被動(dòng)信息系統(tǒng)關(guān)鍵問(wèn)題的解決。造成關(guān)聯(lián)和定位困難的根本原因是被動(dòng)觀測(cè)系統(tǒng)只能獲得目標(biāo)的角度信息,在二維系統(tǒng)中測(cè)量量為目標(biāo)方位信息,這種相對(duì)不同觀測(cè)平臺(tái)的不完全的、相對(duì)的量測(cè)量,在融合處理中存在以下困難:
1)難以對(duì)不同傳感器方位進(jìn)行時(shí)間和空間一致處理。在不同傳感器測(cè)量的目標(biāo)方位是相對(duì)本測(cè)量傳感器的不完全相對(duì)量測(cè)量,因此很難把它們一致到統(tǒng)一的坐標(biāo)系中。同樣,也很難在時(shí)間上進(jìn)行統(tǒng)一,因此傳統(tǒng)方法[1]要求不同傳感器進(jìn)行時(shí)間同步觀測(cè)。
2)難以用方位對(duì)比進(jìn)行信息關(guān)聯(lián)。由于不同觀測(cè)傳感器探測(cè)同一目標(biāo)方位的期望值并不相等,因此無(wú)法對(duì)方位量測(cè)進(jìn)行比較,確定它們是否源自同一目標(biāo),這與單傳感器方位信息融合情況不同。
3)難以消除虛假目標(biāo)。當(dāng)多個(gè)傳感器探測(cè)到多個(gè)目標(biāo)方位時(shí),通過(guò)互聯(lián)構(gòu)成的可能目標(biāo)數(shù)(隨著傳感器和目標(biāo)數(shù)的增加)呈組合增長(zhǎng),其中大量的目標(biāo)為方位線交叉點(diǎn)上的虛假目標(biāo),造成大量計(jì)算,而且消除困難。
4)定位與關(guān)聯(lián)相互依賴和制約。原理上,二者任何一個(gè)都不能獨(dú)立或優(yōu)先解決。由于單傳感器純方位系統(tǒng)目標(biāo)定位完全依賴觀測(cè)平臺(tái)的有效機(jī)動(dòng),如果傳感器平臺(tái)未施行有效機(jī)動(dòng),則各種傳統(tǒng)的[4]和新的、先進(jìn)的估計(jì)方法都是無(wú)效的[5-8];而且在目標(biāo)運(yùn)動(dòng)參數(shù)不確定的情況下,不能對(duì)不同平臺(tái)方位和序列建立關(guān)聯(lián)關(guān)系。因此對(duì)信息關(guān)聯(lián)與目標(biāo)定位問(wèn)題采用傳統(tǒng)分步處理方法處理,存在原理相悖。
關(guān)聯(lián)是各種融合系統(tǒng)需要面對(duì)的技術(shù)難題,其性能直接影響到信息融合的性能,一直以來(lái)受到理論界和工程界的關(guān)注,當(dāng)前針對(duì)具體的融合系統(tǒng)已提出了許多解決辦法,例如用于量測(cè)關(guān)聯(lián)的集合論描述法[1]、近鄰域法、聚類(lèi)算法、有限集多假設(shè)關(guān)聯(lián)法[7]、計(jì)算智能算法和聯(lián)合概率數(shù)據(jù)互聯(lián)法以及神經(jīng)網(wǎng)絡(luò)聯(lián)合概率數(shù)據(jù)互聯(lián)法[9-10]等,多平臺(tái)交叉定位后進(jìn)行點(diǎn)跡關(guān)聯(lián)法[11],模糊關(guān)聯(lián)法或灰關(guān)聯(lián)法等[12-14]。這些方法都不同程度地受到平臺(tái)和目標(biāo)數(shù)量的影響。
信息融合結(jié)構(gòu)是融合系統(tǒng)不可回避的問(wèn)題,它決定了采取何種信息融合算法[1],例如典型的分布式信息融合、集中式信息融合、混合式信息融合等,各種信息融合結(jié)構(gòu)各有利弊,應(yīng)用中很難一以概之,必須依據(jù)實(shí)際系統(tǒng)需求確定相應(yīng)的結(jié)構(gòu),被動(dòng)信息融合系統(tǒng)尤其如此[10,15]。
本文針對(duì)分布式被動(dòng)傳感器信息融合中信息關(guān)聯(lián)和目標(biāo)估計(jì)關(guān)鍵問(wèn)題,采取融合中心分層處理的混合式信息融合結(jié)構(gòu),建立全局最優(yōu)互聯(lián)模型和非線性估計(jì)模型,并應(yīng)用一種Hopfield型神經(jīng)網(wǎng)絡(luò)的求解算法,仿真結(jié)果表明這是分布式被動(dòng)信息融合系統(tǒng)的一種有效解決方案。
1 問(wèn)題描述
1.1 多源信息關(guān)聯(lián)問(wèn)題


滿足上述條件的所有矩陣全體構(gòu)成關(guān)聯(lián)解空間Λ,多源信息關(guān)聯(lián)問(wèn)題就是在Λ中尋找出唯一正確的關(guān)聯(lián)解。
1.2 多目標(biāo)估計(jì)問(wèn)題
對(duì)于一個(gè)關(guān)聯(lián)解J=(jts)n×m,其對(duì)應(yīng)的測(cè)量集為Z(J)={Z1,Z2,…,Zn},后驗(yàn)概率密度函數(shù)記為pJ=p(ZJ|X),其中X=(X1,X2,…,Xt,…,Xn),Xt為目標(biāo)t的待估參數(shù),例如位置、速度、航向等。
(1)
根據(jù)1.1節(jié)定義可知,關(guān)聯(lián)解空間Λ的不同元素個(gè)數(shù)為r(Λ)=(n!)m-1。因此隨著目標(biāo)數(shù)和傳感器數(shù)的增加,r(Λ)呈組合式上升,在解空間Λ尋求唯一的正確關(guān)聯(lián)解一般很困難,其尋優(yōu)問(wèn)題為非確定性多項(xiàng)式(NP)計(jì)算復(fù)雜性難題。為了解此計(jì)算復(fù)雜性難題,本文從信息融合結(jié)構(gòu)和算法入手:一是研究采取分層信息融合結(jié)構(gòu),避免上述多重組合問(wèn)題;二是研究應(yīng)用一種優(yōu)化神經(jīng)網(wǎng)絡(luò)算法,避免關(guān)聯(lián)中的組合計(jì)算。
2 信息融合結(jié)構(gòu)
如圖1所示為融合中心所采取的傳感器有序分層信息融合結(jié)構(gòu)。在這種信息融合結(jié)構(gòu)中,首先,按一定順序?qū)鞲衅鲀?yōu)先級(jí)進(jìn)行排序,優(yōu)先者排前;其次,在融合處理中心依次構(gòu)建m-1個(gè)有序的融合處理節(jié)點(diǎn);第三,按節(jié)點(diǎn)順序進(jìn)行傳感器信息融合處理,每個(gè)節(jié)點(diǎn)僅對(duì)兩個(gè)信息源進(jìn)行融合處理,在最后一個(gè)節(jié)點(diǎn)輸出融合結(jié)果。優(yōu)先順序一般可以按照傳感器精度、探測(cè)范圍、分布位置等來(lái)設(shè)置。
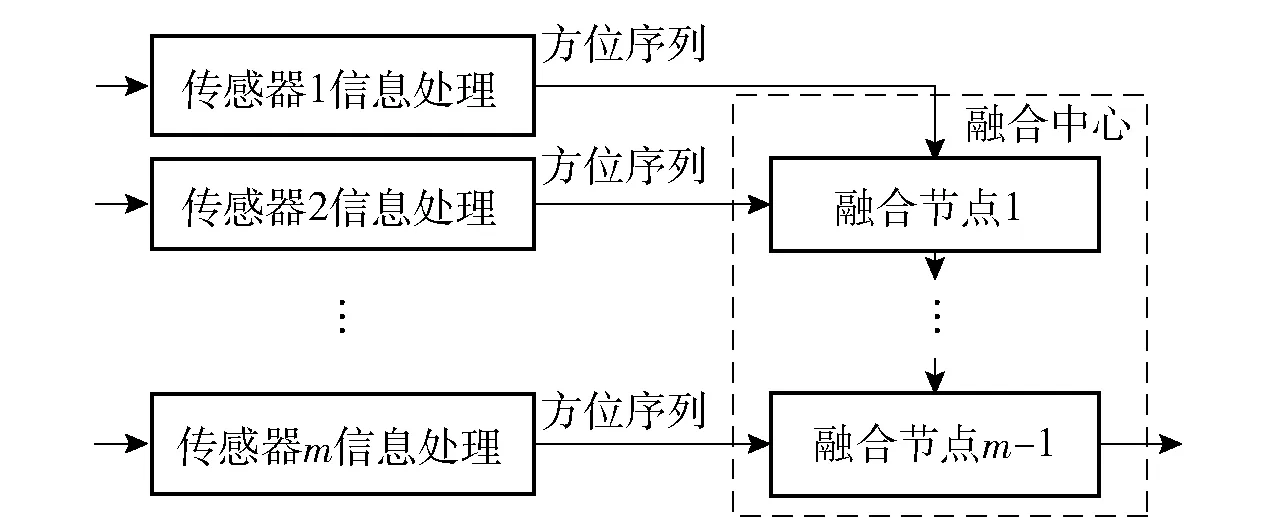
圖1 融合中心有序分層信息融合結(jié)構(gòu)
這種處理結(jié)構(gòu)由于每個(gè)融合節(jié)點(diǎn)考慮了兩個(gè)傳感器信息,解決了單傳感器測(cè)量系統(tǒng)的不可觀測(cè)問(wèn)題。在計(jì)算量方面,分層信息融合處理時(shí)可能目標(biāo)數(shù)為(m-1)n!,它與多傳感器信息融合時(shí)可能目標(biāo)數(shù)之比為(m-1)n!/(n!)m-1,因此分層信息融合計(jì)算量降低了(n!)m-2/(m-1)倍。這表明當(dāng)傳感器數(shù)目m>2時(shí),分層信息融合處理結(jié)構(gòu)的計(jì)算量是大量減少的。
然而,進(jìn)行雙傳感器信息關(guān)聯(lián)處理時(shí),可行關(guān)聯(lián)的目標(biāo)總個(gè)數(shù)達(dá)到n!,其計(jì)算量依然具有NP計(jì)算復(fù)雜性,在目標(biāo)數(shù)目較大時(shí),一般信息融合系統(tǒng)難以承受。為此,本文將應(yīng)用一種優(yōu)化Hopfield型神經(jīng)網(wǎng)絡(luò)建立雙傳感器信息關(guān)聯(lián)算法。
3 全局最優(yōu)關(guān)聯(lián)模型
在進(jìn)行雙傳感器信息的關(guān)聯(lián)處理時(shí),將傳感器1目標(biāo)的排列順序固定,則雙傳感器信息的關(guān)聯(lián)由傳感器2的目標(biāo)排列順序確定。設(shè)k時(shí)刻2個(gè)探測(cè)傳感器的融合輸出分別為
(2)
式中:
(3)
(xt(k),yt(k))為目標(biāo)位置參數(shù),(xos(k),yos(k))為傳感器位置參數(shù),ns(k)為測(cè)量噪聲,t=1,2,…,n,s=1,2.
定義矩陣
C=(cij)n×n
(4)
稱(chēng)為可行關(guān)聯(lián)矩陣,其元素僅為0或1:
(5)
且滿足如下約束條件:
設(shè)l1,l2,…,ln為1,2,…,n的一個(gè)排列,則L=(l1,l2,…,ln)構(gòu)成一個(gè)可行關(guān)聯(lián)解。若可行關(guān)聯(lián)矩陣Cl的元素滿足(Cl)jli=1,而其他元素等于0,則其對(duì)應(yīng)的可行關(guān)聯(lián)解L=(l1,l2,…,ln);反之,若有可行關(guān)聯(lián)解,則矩陣Cl的(Cl)tlt=1,而Cl的其他元素等于0,即Cl是一個(gè)可行關(guān)聯(lián)矩陣。因此,一個(gè)可行關(guān)聯(lián)矩陣完全表達(dá)了2個(gè)傳感器信息間的關(guān)聯(lián)關(guān)系。將所有可能的可行關(guān)聯(lián)矩陣集合記為
C(n)={C1,C2,…,CN},
(6)
式中:N=n!.則在可行關(guān)聯(lián)矩陣為Cl∈C(n)(1≤l≤N)的假定下,各目標(biāo)對(duì)應(yīng)的方位序列為

(7)
設(shè)方位測(cè)量的條件概率密度函數(shù)為p(Z|Cl,X),則可構(gòu)建解關(guān)聯(lián)和目標(biāo)估計(jì)問(wèn)題的全局聯(lián)合優(yōu)化模型為
(8)
其等價(jià)描述的模型為
(9)
顯然
p(Z|Cl,X)=p(Z(Cl)|X)=

(10)
因此上述聯(lián)合優(yōu)化模型可分解為如下全局最優(yōu)關(guān)聯(lián)模型和最優(yōu)估計(jì)模型:
(11)
(12)
式中:dij稱(chēng)為互相關(guān)指數(shù)。
本文給出了基于Hopfield神經(jīng)網(wǎng)絡(luò)的全局優(yōu)化關(guān)聯(lián)求解算法,過(guò)程如圖2所示,其重點(diǎn)在于解全局關(guān)聯(lián)優(yōu)化問(wèn)題(11)式和解參數(shù)優(yōu)化問(wèn)題(12)式,相應(yīng)算法將分別在第4、第5節(jié)中描述。
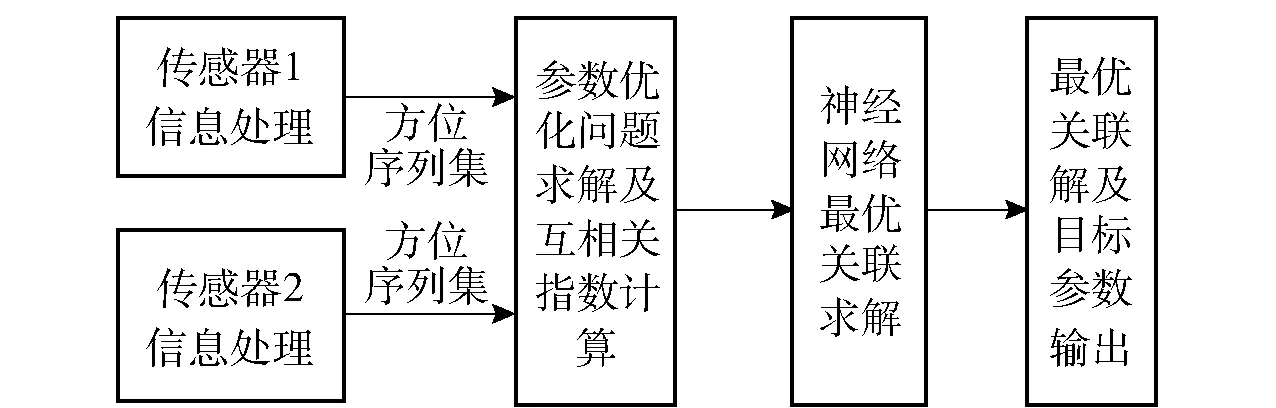
圖2 神經(jīng)網(wǎng)絡(luò)全局優(yōu)化關(guān)聯(lián)求解過(guò)程
4 多目標(biāo)估計(jì)
設(shè)目標(biāo)勻速直線運(yùn)動(dòng),待估參數(shù)取為目標(biāo)初始直角坐標(biāo)位置和坐標(biāo)軸方向速度分量,即Xt=(x0ty0tvxtvyt)T=(xt1xt2xt3xt4)T,在已知關(guān)聯(lián)矩陣Cl的條件下,有
(13)

(14)
令
(15)
將方位測(cè)量代入得
(16)
式中:
(17)
(18)
因此得到目標(biāo)估計(jì)問(wèn)題的最優(yōu)化模型為
(19)
上述優(yōu)化模型本質(zhì)是多目標(biāo)運(yùn)動(dòng)參數(shù)的估計(jì)問(wèn)題,其算法可見(jiàn)文獻(xiàn)[16]的非線性估計(jì)算法和文獻(xiàn)[17]的濾波算法。
5 神經(jīng)網(wǎng)絡(luò)關(guān)聯(lián)求解
5.1 神經(jīng)網(wǎng)絡(luò)構(gòu)造
為了從(11)式求全局最優(yōu)關(guān)聯(lián)解,類(lèi)似于多目標(biāo)跟蹤問(wèn)題[9],構(gòu)造一個(gè)n×n維的神經(jīng)網(wǎng)絡(luò)陣列V=(Vij)n×n,行對(duì)應(yīng)于傳感器1的目標(biāo),列對(duì)應(yīng)于傳感器2的目標(biāo),陣列中神經(jīng)元的狀態(tài)對(duì)應(yīng)可行關(guān)聯(lián)矩陣的元素,對(duì)應(yīng)關(guān)系為
(20)
當(dāng)cij=1時(shí),表示傳感器1的目標(biāo)i與傳感器2的目標(biāo)j關(guān)聯(lián)。定義能量函數(shù):
(21)

(22)

Cδjs+D+Edijδitδjs,
(23)
式中:δij為Kronecker-δ函數(shù),當(dāng)i=j時(shí)δij=1,否則δij=0.
5.2 神經(jīng)網(wǎng)絡(luò)模擬運(yùn)行
建立動(dòng)態(tài)系統(tǒng)方程:
(24)
顯然g′(u)>0.動(dòng)態(tài)系統(tǒng)運(yùn)行時(shí),能量的變化率為
(25)
可見(jiàn),能量函數(shù)變化呈下降狀態(tài),并隨著時(shí)間的推演達(dá)到能量極小。
初始時(shí)刻取t0、迭代步長(zhǎng)取Δt,對(duì)動(dòng)態(tài)方程離散化處理可得
(26)
6 仿真計(jì)算實(shí)例
在仿真計(jì)算中,模擬4個(gè)被動(dòng)傳感器探測(cè)、15個(gè)目標(biāo)的應(yīng)用場(chǎng)景(m=2,n=15),傳感器和目標(biāo)的初始參數(shù)如表1(包括它們的初始坐標(biāo)、速度、航向)所示,傳感器(方位)測(cè)量誤差均方差分別為0.50°、0.70°、0.90°、1.20°,按傳感器測(cè)量精度分層,采樣和系統(tǒng)融合周期為10 s.在模擬神經(jīng)網(wǎng)絡(luò)運(yùn)行中,能量函數(shù)系數(shù)取為:A=10,B=10,C=200,D=50,E=150,強(qiáng)調(diào)關(guān)聯(lián)指標(biāo)的優(yōu)化;動(dòng)態(tài)系統(tǒng)的數(shù)字仿真參數(shù)取為t0=1 s和Δt=0.005 s,運(yùn)行終止條件為能量函數(shù)變化率ΔE小于ε=0.000 01,選取初值為
Uij(0)=ΔUij-U0ln(n+1),
(27)
式中:ΔUij為[-U0,U0]上的隨機(jī)數(shù),U0=0.1.
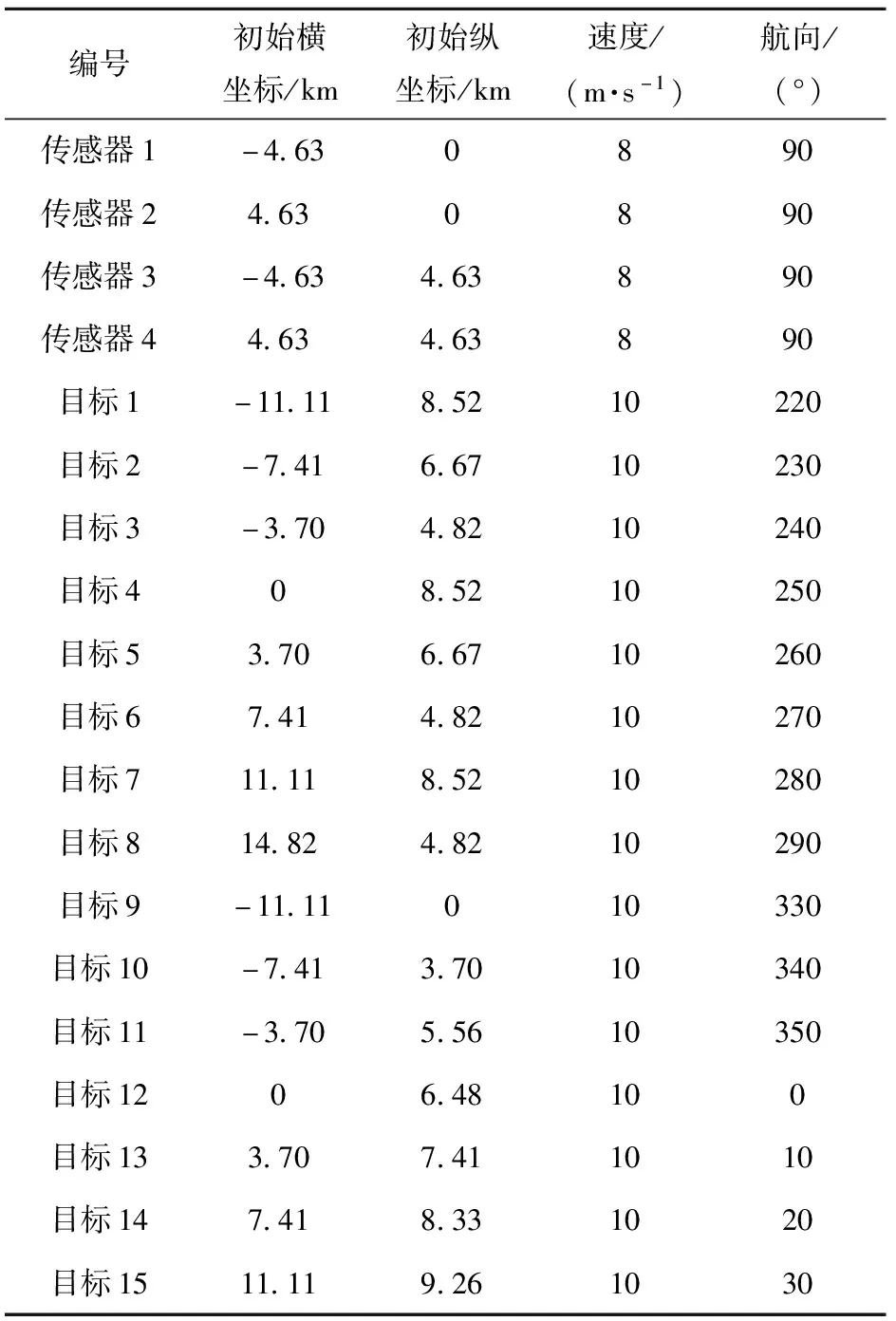
表1 仿真態(tài)勢(shì)初始參數(shù)
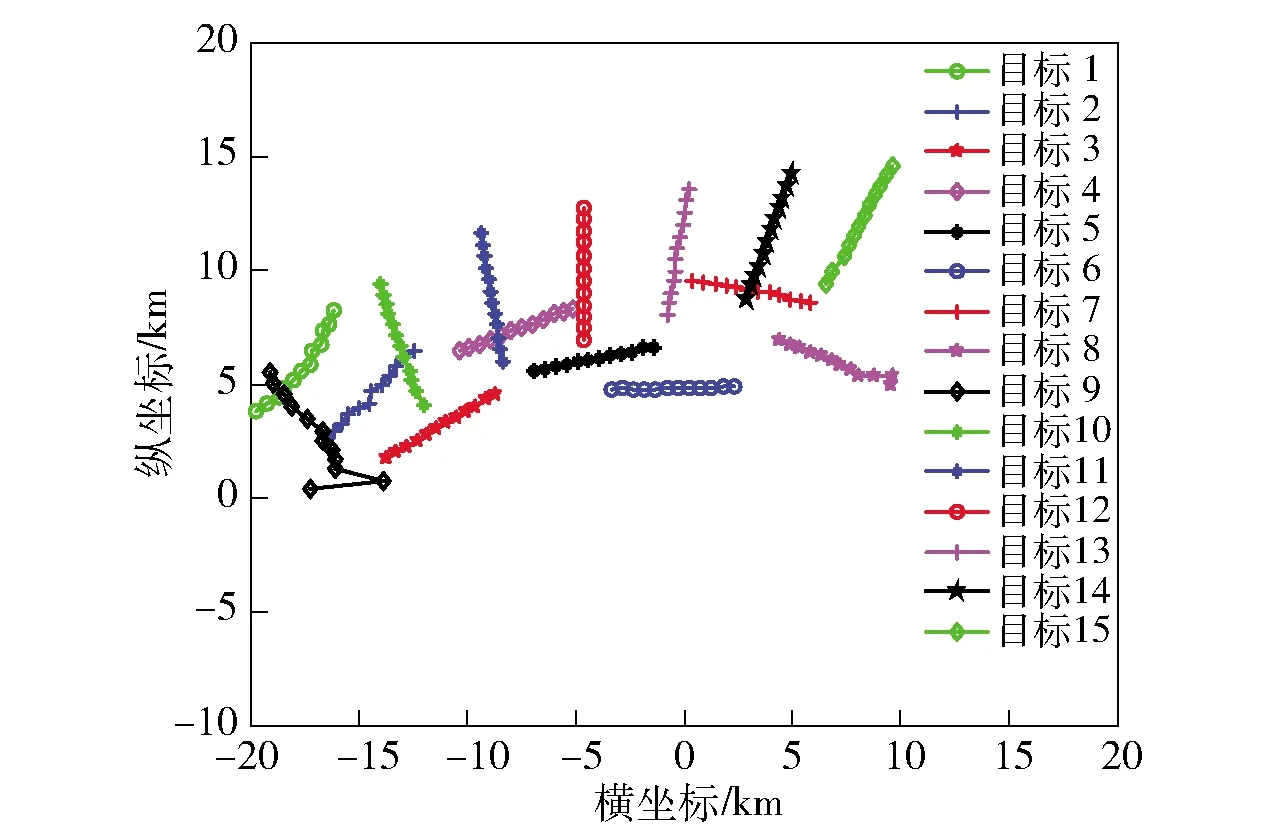
圖3 分布式被動(dòng)傳感器信息融合態(tài)勢(shì)
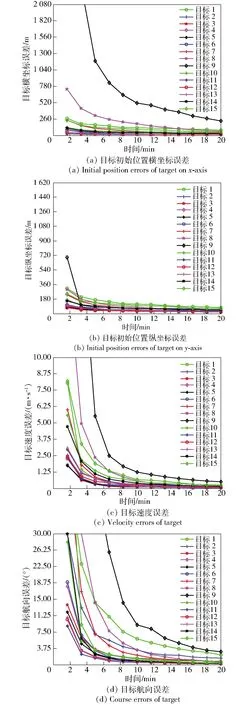
圖4 分布式被動(dòng)傳感器信息融合目標(biāo)參數(shù)誤差
目標(biāo)參數(shù)估計(jì)采用文獻(xiàn)[16]中的四維非線性模型。仿真結(jié)果的融合態(tài)勢(shì)如圖3所示,蒙特卡洛仿真統(tǒng)計(jì)的目標(biāo)參數(shù)誤差如圖4所示。在100次的蒙特卡洛和20 min觀測(cè)共120次采樣周期的計(jì)算中,模擬神經(jīng)網(wǎng)絡(luò)關(guān)聯(lián)正確率達(dá)到94%.在對(duì)如表1的目標(biāo)態(tài)勢(shì)參數(shù)進(jìn)行隨機(jī)擾動(dòng),模擬新的態(tài)勢(shì)進(jìn)行蒙特卡洛計(jì)算,統(tǒng)計(jì)得到的關(guān)聯(lián)正確率為90.0%.
在耗時(shí)方面,從傳感器獲得測(cè)量到輸出多目標(biāo)運(yùn)動(dòng)態(tài)勢(shì),用i5-3470型4核處理器、8 GB內(nèi)存的個(gè)人計(jì)算機(jī),平均每個(gè)處理周期耗時(shí)0.47 s.在傳統(tǒng)組合優(yōu)化狀態(tài)下,在15個(gè)目標(biāo)情況下,解空間狀態(tài)個(gè)數(shù)為1.30×1012,如果一次搜索耗時(shí)1/100 ms,則每個(gè)融合處理周期平均耗時(shí)需要時(shí)間約360 h.
從仿真計(jì)算看,用神經(jīng)網(wǎng)絡(luò)解全局關(guān)聯(lián)在運(yùn)行實(shí)效方面具有相當(dāng)明顯的優(yōu)勢(shì),使目標(biāo)數(shù)較大情況下全局關(guān)聯(lián)優(yōu)化組合的不可解問(wèn)題變得可解。
在神經(jīng)網(wǎng)絡(luò)運(yùn)行參數(shù)不變的情況下,對(duì)仿真態(tài)勢(shì)進(jìn)行擾動(dòng),仿真結(jié)果顯示,信息融合性能受到一定影響,表明神經(jīng)網(wǎng)絡(luò)存在一定的不穩(wěn)定性以及對(duì)態(tài)勢(shì)的依賴性,這些因素在應(yīng)用中值得重視。
7 結(jié)論
本文針對(duì)分布式被動(dòng)傳感器信息融合的特點(diǎn)、難點(diǎn),研究了信息融合結(jié)構(gòu)、信息關(guān)聯(lián)、目標(biāo)估計(jì)等關(guān)鍵技術(shù)。通過(guò)應(yīng)用一種混合式有序分層信息融合體系結(jié)構(gòu),建立了用于雙傳感器信息融合的純方位信息關(guān)聯(lián)與參數(shù)估計(jì)聯(lián)合優(yōu)化模型,并采用神經(jīng)網(wǎng)絡(luò)算法求解最優(yōu)關(guān)聯(lián)解。本文所用方法避免了多傳感器信息的多重組合和多目標(biāo)關(guān)聯(lián)中的組合計(jì)算,有效解決了定位與關(guān)聯(lián)相悖的問(wèn)題。
仿真結(jié)果表明,本文所提出的信息融合結(jié)構(gòu)及其聯(lián)合優(yōu)化模型在數(shù)據(jù)互聯(lián)正確率、目標(biāo)參數(shù)估計(jì)精度等性能上均表現(xiàn)出良好的性能,關(guān)聯(lián)和估計(jì)穩(wěn)定。本文所采取的解決方法可以應(yīng)用于多被動(dòng)聲納、電子支援措施等無(wú)源探測(cè)信息融合領(lǐng)域。
猜你喜歡
今日農(nóng)業(yè)(2021年19期)2022-01-12 06:16:36
當(dāng)代陜西(2021年17期)2021-11-06 03:21:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年1期)2021-03-19 08:28:38
現(xiàn)代出版(2020年3期)2020-06-20 07:10:34
學(xué)苑創(chuàng)造·A版(2018年11期)2018-02-01 06:29:20
中華手工(2017年2期)2017-06-06 23:00:31
讀者(2017年5期)2017-02-15 18:04:18
中外會(huì)展(2014年4期)2014-11-27 07:46:46
當(dāng)代修辭學(xué)(2011年2期)2011-01-23 06:39:12
- 兵工學(xué)報(bào)的其它文章
- 混凝土材料拉伸強(qiáng)度的應(yīng)變率強(qiáng)化效應(yīng)實(shí)驗(yàn)研究
- 基于極大似然法的高速無(wú)人艇操縱響應(yīng)模型參數(shù)辨識(shí)
- 基于插值短時(shí)分?jǐn)?shù)階傅里葉變換- 變權(quán)擬合的線性調(diào)頻信號(hào)參數(shù)估計(jì)
- 基于支持度的橢球擬合微機(jī)械電子系統(tǒng)加速度計(jì)現(xiàn)場(chǎng)標(biāo)定方法研究
- 基于可觀測(cè)性分析的混合式慣性導(dǎo)航系統(tǒng)連續(xù)自標(biāo)定模型選擇
- 基于改進(jìn)型多項(xiàng)式混沌展開(kāi)的固體火箭發(fā)動(dòng)機(jī)藥柱低溫點(diǎn)火不確定性量化分析