基于極大似然法的高速無人艇操縱響應模型參數辨識
2020-02-18 03:52:54褚式新茅云生董早鵬楊鑫
兵工學報 2020年1期
褚式新,茅云生,董早鵬,楊鑫
(1.武漢理工大學 高性能船舶技術教育部重點實驗室, 湖北 武漢 430063;2.武漢理工大學 交通學院, 湖北 武漢 430063)
0 引言
近年來,由于海洋資源開發的蓬勃發展,各類智能化海洋裝備都備受關注,各學者關于此類海洋裝備的研究也層出不窮[1-2],其中關于無人海洋運載器(UMV)的研究最為廣泛[3],UMV包括無人波浪滑翔機(UWG)[4]、水下自主航行器(AUV)[5-6]、無人水下機器人(UUV)和水面無人艇(USV)等[7-8],其中USV由于其船型輕巧、智能化等特點廣泛應用在軍事和商業等各個方面,各個國家非常重視USV的研究和發展[9-11]。良好的操縱性是USV智能化的基礎,而操縱性的預報精度與操縱響應模型參數的精度相關。隨著系統辨識學科的發展,系統辨識的方法被廣泛應用在各種模型參數的辨識上,改變了以往通過實驗獲取模型參數的現狀,節約了實驗成本。而在船舶方面的研究,各種辨識方法層出不窮,對操縱模型參數的辨識精度也越來越高,對船舶的操縱性預報也越來越精確[12]。
眾多學者采用辨識的方法對船舶的操縱性進行了研究:Luo等[13]、張心光等[14]研究了支持向量機(SVM)在船舶操縱模型中的辨識效果,并在船模實驗中得到了驗證;Zhu等[15]通過人工蜂群算法對SVM進行優化,辨識了大型集裝箱船的運動模型;Xu等[16]和謝朔等[17]將最小二乘法與SVM結合運用,實現了參數的在線辨識;文獻[18-22]介紹了卡爾曼濾波在船舶運動模型參數辨識方面的應用,包括擴展卡爾曼濾波(EKF)和無跡卡爾曼濾波(UKF)。
但是目前所使用的辨識算法在獲取USV操縱響應模型參數方面的研究較少,且算法存在精度不高的問題,USV一般體型較小,需要較精確的操縱性預報,因此需要一種精度較高的辨識算法獲取響應模型參數。極大似然(ML)算法是系統辨識中一種常見的辨識算法,已經應用在很多領域內的參數獲取上[23-26],具有簡單、方便、精度高等特點,但是目前應用在USV運動模型上的研究比較少見,本文基于ML算法,結合高速USV的2階非線性運動模型展開研究。
1 高速USV操縱數學模型
隨著海洋資源開發效率的提升,對USV航速的要求越來越高,隨著航速的提升,對USV的操縱性要求越來越高。描述USV運動模型又分為MMG(由日本Maneuvering Modeling Group提出,簡稱MMG)模型、Abkowitz模型和響應型模型,其中MMG分離模型與Abkowitz整體模型因為分析了USV的水動力受力,從根本上得到USV的運動機理,使USV的運動得到精確的預報。但是由于模型中含有眾多水動力導數,求解起來比較困難,難以普遍使用。相對來說響應型模型用簡單的數學表達式反映了操縱舵角與艏向角的關系式,因此在預報USV操縱性上被廣泛使用。響應型模型分為1階線性、1階非線性、2階線性和2階非線性模型。由于2階線性模型受小擾動限制,當USV運動幅度較大時,線性響應模型已經不再適用,其運動模型中的非線性項值不能忽略,在高速USV操縱響應模型中必須要加上非線性項,才能滿足其操縱響應變化,由文獻[27]得高速USV 2階非線性操縱響應方程為
(1)
式中:T1、T2、T3為時間常數(s),表示應舵性和航向穩定性;r為艏向角速度;α為非線性項系數(s2/rad2);K為舵角增益(s-1);δ為舵角;δr表示壓舵角(rad)。
2 響應模型參數辨識
2.1 ML算法
ML算法是Fisher等在1912年提出的一種辨識算法。它根據觀測輸出量的條件概率分布構造以觀測數據和未知參數為自變量的似然函數,當似然函數取最大值時,自變量的值即為模型參數的辨識值。ML算法是系統辨識中一種比較常用的辨識方法,具有簡單和高精度等優點。對于一個形如(2)式的模型:
Yt=Htθ,
(2)
式中:Yt為輸出量矩陣,包含從開始到t時刻的所有輸出量;Ht為輸入量矩陣,包含從開始到t時刻的所有輸入量;θ為參數矩陣。定義似然函數為
L(Yt|θ)=f(y1|θ)f(y2|θ)…f(yt|θ),
(3)
式中:f(yt|θ)表示t時刻的觀測值概率分布密度。似然函數就是從1到t時刻的所有觀測值概率分布密度的乘積。
為了方便求出似然函數的極大值,將其變換為
(4)
對參數θ求導,得
(5)
可推得參數θ的ML估計為
(6)
由此即可得到基于ML算法對形如(2)式模型的參數辨識結果。
2.2 數據采集
Z形實驗是一種常見的USV操縱運動,目前基于船舶操縱性的研究大部分以此展開。本文基于數學分析軟件MATLAB開展Z形半物理仿真操縱實驗,以獲取辨識所需實驗數據。選取文獻[28]中參數,如表1中所示。

表1 USV 2階非線性操縱響應模型參數
基于上述響應模型參數,應用工程上常用的4階龍格- 庫塔法進行計算,以MATLAB 2018a軟件為仿真計算平臺,進行了20° Z形仿真操縱實驗。為擬合真實實驗,仿真采樣時間間隔取1 s,采樣時間為500 s,各項數據如圖1所示,圖中ψ為艏向角。
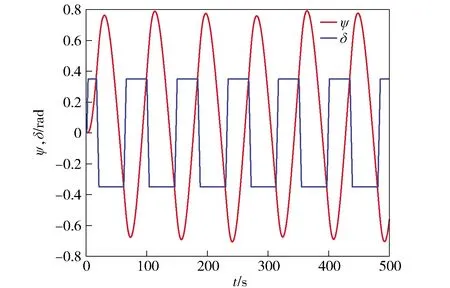
圖1 20° Z形實驗仿真數據
2.3 Z形實驗參數辨識
為了滿足基于ML算法辨識需求,需要構造形如(2)式的辨識模型,因此需要將待辨識模型(1)式轉化為(2)式。由于(1)式為連續模型,需要使用差分法對其進行離散處理,考慮到實際實驗中艏向角比其他參數容易測量獲取,將(1)式中各物理量使用前向差分法差分到艏向角,具體差分過程為
(7)
(8)
(9)
(10)
式中:Δt為時間間隔。
將(7)式~(10)式代入(1)式中,令y(t)=ψ(t+1)-ψ(t),得



(11)
將(11)式寫成矩陣形式,即可得到Yt=Htθ的辨識模型,矩陣的具體表達式為:
輸入矩陣
Ht=[(Δt)3δ(t) (Δt)3(Δt)2[δ(t+1)-δ(t)]
-Δt[y(t+1)-y(t)] -(Δt)2y(t) -y3(t)];
(12)
參數矩陣
(13)
輸出矩陣
Yt=[y(t+2)-2y(t+1)+y(t)].
(14)
基于圖1中的仿真數據,可依次計算輸入矩陣和輸出矩陣的各值,然后根據ML算法的辨識結果(6)式可得到USV 2階非線性響應模型的參數辨識結果。
為充分體現ML算法在辨識模型參數上的精確性,將ML算法與目前參數辨識中常用的EKF算法在20° Z形仿真實驗數據的情況下展開辨識,并對比其辨識結果,辨識結果如表2所示。

表2 20° Z形仿真辨識結果
由表2可以看出,ML算法在辨識高速USV操縱響應模型參數時,T1、K、α、δr參數辨識精度均較EKF算法有所提高,但T2、T3參數辨識精度誤差很大,且同時向大于原始值的方向偏移,故認為此辨識結果產生了參數漂移。
參數漂移現象產生的原因是在設計辨識模型時,使用了前向差分法離散角速度和舵角變化率等物理量。由圖1可知,艏向角的變化曲線很光滑,用差分法處理時誤差很小,但是舵角的變化曲線卻不光滑,使用差分法處理時誤差很大,導致了T2、T3的漂移。鑒于目前的操縱運動中只有正弦實驗舵角變化曲線比較光滑,使用差分法處理時誤差較小,將采用正弦仿真數據開展辨識。
2.4 正弦實驗參數辨識
(15)
辨識數據的采集改用20°正弦仿真實驗,與Z形仿真實驗相同,采樣時間間隔取1 s,采樣時間取500 s.仿真數據如圖2所示。
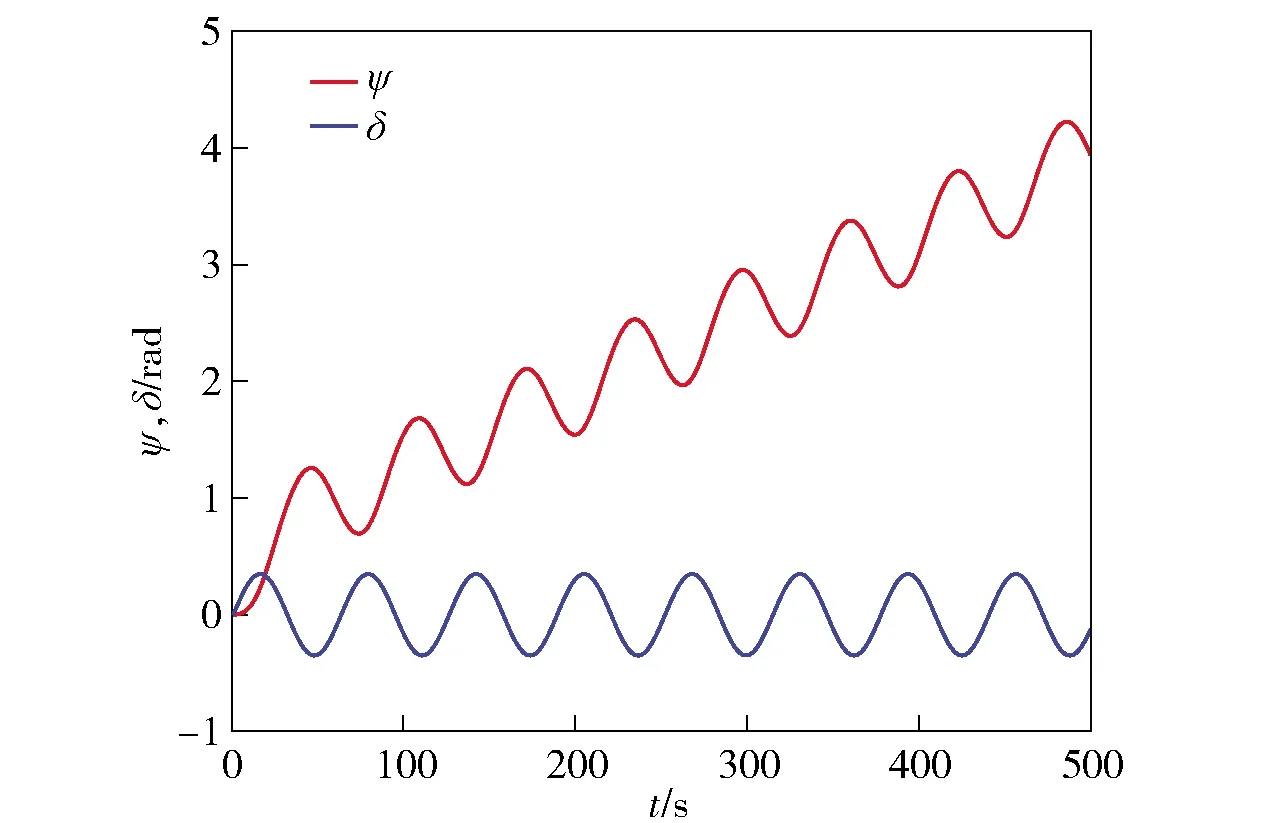
圖2 20°正弦實驗仿真數據
辨識過程與Z形實驗相同,與Z形實驗對比結果如表3所示。

表3 20°正弦和Z形實驗辨識結果對比
由表3可知:基于正弦仿真數據下辨識,在其他參數辨識精度變化不大的情況下,T2、T3整體參數辨識精度有較大改善;改善后T2辨識結果小于真實值,T3辨識結果大于真實值,說明了此方法對改善響應模型辨識中參數漂移的有效性。同時也通過此方法使辨識結果精度得到進一步的提升,從而最大程度提高USV的操縱性預報精度。
3 仿真實驗
為了將USV 2階非線性響應模型參數辨識結果與具體的USV操縱運動預報相對應,本文基于表2的ML算法與EKF算法的辨識結果開展了5°、10°、20°和30°正弦和Z形半物理仿真操縱實驗,以分析本文所提ML算法和EKF算法,基于Z形仿真數據下的辨識參數結果,在USV操縱性預報上的預報精度。
因為在USV運動時,容易觀測艏向角,所以只繪制了艏向角的變化曲線,為符合實際情況,均將艏向角值限制在[0 rad,2π rad]范圍內,實驗結果如圖3所示。
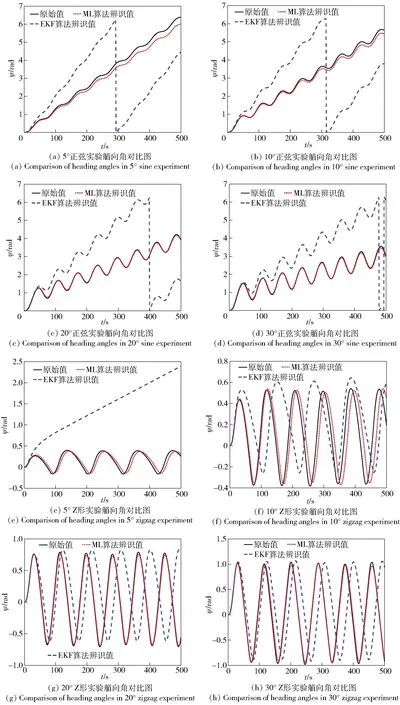
圖3 操縱運動仿真實驗驗證圖
由圖3可以看出,與EKF算法辨識結果對操縱性實驗的預報相比,基于ML算法的辨識結果顯然與真實操縱運動艏向角的變化更加擬合,且在不同角度與不同類型實驗下都非常接近真實值,證明了ML算法的辨識結果精度優于EKF算法,且算法具有很高的泛化性。圖3(e)與其他Z形實驗艏向角變化形狀不同的原因在于EKF算法辨識的δr值較大,5°的Z形實驗不能使舵角左右偏移,舵角一直在一邊,所以呈現的艏向角變化是一直增大的。
但是ML算法基于Z形數據的辨識結果在T2、T3參數處仍有較大誤差,由表3的辨識數據可知,ML算法基于正弦實驗數據辨識能提高T2、T3參數辨識精度,消除因參數漂移所帶來的誤差。為將辨識精度反映到操縱預報上,將基于表3正弦辨識和Z形辨識結果開展操縱運動驗證。由圖3可知,基于ML算法的Z形辨識結果在正弦和Z形操縱仿真實驗中非常接近真實值,因此在這兩種操縱運動中,基于正弦辨識結果的預報相對于Z形辨識的提升并不明顯。考慮用回轉運動去驗證基于正弦實驗辨識對操縱性的提升,將基于兩種實驗仿真數據辨識結果開展5°、10°、20°和30°回轉運動,對比結果如圖4所示。
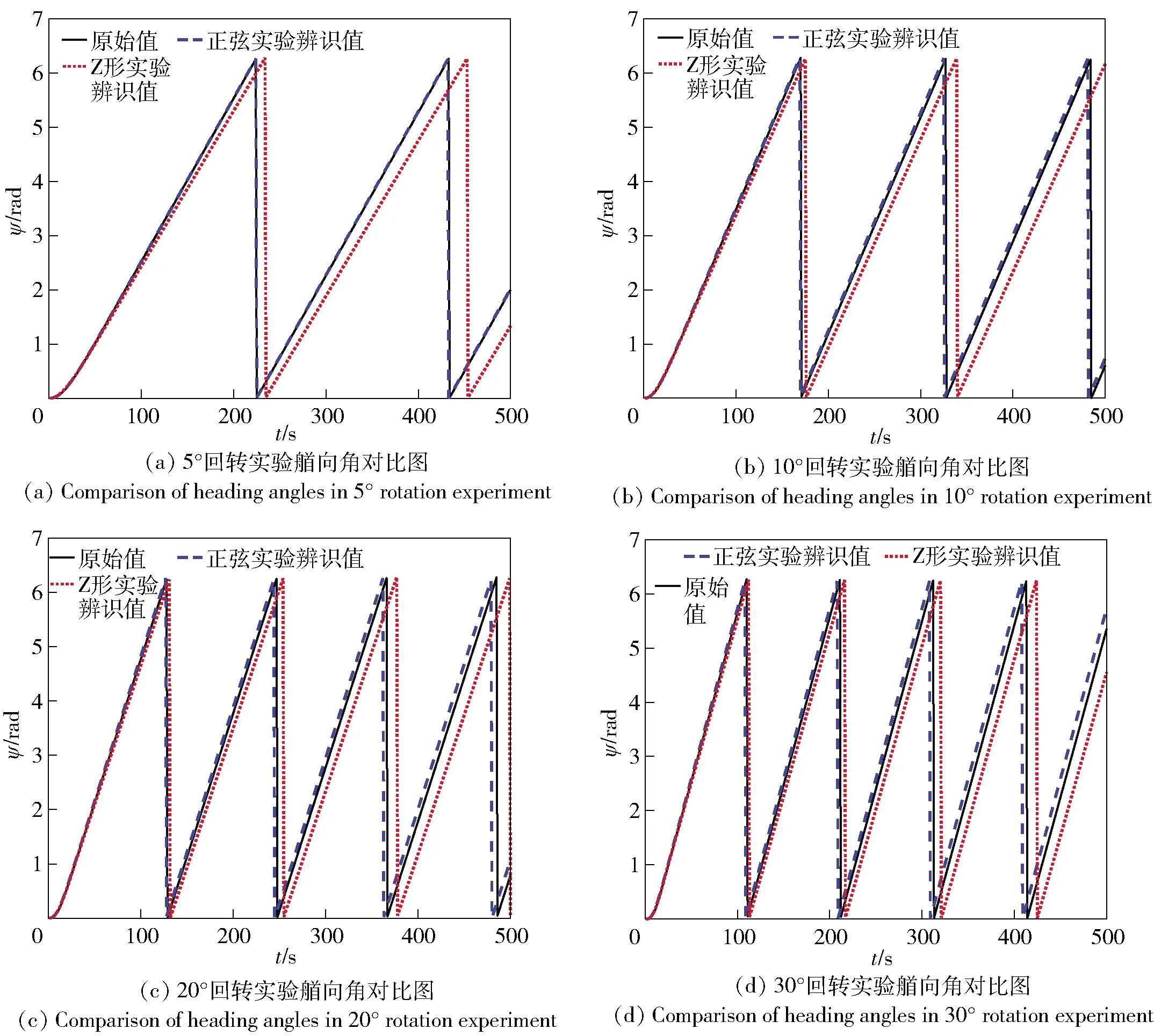
圖4 回轉仿真實驗驗證圖
從圖4可以看出,在ML算法對USV 2階非線性響應模型參數辨識過程中,基于正弦仿真實驗數據辨識的結果對回轉運動的預報與真實變化非常擬合,且精度明顯高于Z形實驗的,同樣也驗證了基于正弦實驗數據辨識結果也具有極強的泛化能力。由此可以證明,基于正弦實驗數據辨識結果消除了參數漂移現象,對參數T2、T3的辨識精度有很大提升,同時提高了USV的整體辨識精度。綜上所述,基于正弦實驗數據辨識能有效消除基于Z形實驗數據辨識中的參數漂移現象,提高了USV的模型參數整體辨識精度,從而提高USV在各種復雜操縱運動中的預報精確度。
4 結論
針對高速USV操縱性預報困難與精度不高等問題,本文提出了一種用于獲取高速USV 2階非線性響應模型參數的ML辨識方法,并基于辨識結果預報了高速USV的操縱運動。本文從ML算法的辨識模型設計、辨識過程、辨識結果分析、辨識結果對比4個方面展開了研究,并進行了泛化性仿真操縱性實驗驗證。主要得到以下結論:
1)基于USV 2階非線性響應模型設計了ML辨識算法模型,通過仿真采集了Z形實驗數據,以此初步辨識了模型參數,并與EKF算法辨識結果進行了對比,驗證了ML辨識算法是一種精度極高的算法。
2)通過研究發現,ML算法在辨識USV 2階非線性響應模型參數時,由于使用前向差分法處理舵角變化率會導致T2、T3參數在辨識過程中的漂移現象,提出采用舵角光順變化的正弦實驗進行辨識,且辨識結果能有效地消除參數漂移現象。
3)為驗證辨識精度對于操縱性預報的影響,進行了5°、10°、20°及30° Z形、正弦和回轉操縱運動仿真實驗。實驗結果表明:ML算法具有很強的泛化性,無論操縱運動種類和角度的變化,其辨識結果都能有效地預報USV的操縱性。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
光學精密工程(2016年6期)2016-11-07 09:07:19
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
核科學與工程(2015年4期)2015-09-26 11:59:03