基于非接觸測量技術的邊坡點云數據獲取
2020-02-22 12:21:45鄧一邱淑豪張愷周燁
科技風 2020年5期
關鍵詞:無人機
鄧一 邱淑豪 張愷 周燁

摘 要:本文利用無人機及三維激光掃描儀來獲取邊坡點云數據,主要講述非接觸測量技術在邊坡地質信息拾取中的作業流程及便利性。
關鍵詞:無人機;三維激光掃描儀;點云數據
1 總述
非接觸測量技術是近年來出現的新技術,它包括數字攝影測量技術和激光掃描技術[1]。數字攝影技術方面使用較多的是無人機傾斜攝影技術,通過拍攝影像數據提供地形地貌特征;而激光掃描技術方面使用最多的則為地面三維激光掃描儀,可直接獲取反映邊坡表面地質信息的三維點云數據。
本文將以楊家山隧道某處邊坡為例,采用無人機與三維激光掃描儀獲取邊坡表面地質信息,探討如何將非接觸測量技術用在地質信息獲取上。
2 點云數據獲取方式
2.1 無人機獲取點云數據
本文用大疆無人機獲取邊坡影像數據,應用Pix4D mapper軟件進行影像數據處理。使用無人機傾斜攝影測量技術進行三維地質模型獲取的一般作業流程為:現場踏勘、航線規劃、飛行作業、數據后處理。
(1)現場踏勘:該邊坡長度大概有200m,坡頂坡底相對高差大概有100m,邊坡兩端各有一部分延伸出去的斜坡。由于靠近坡底的位置有幾個較大的水池與圍欄,步行難以靠近,人工測量巖體結構面非常困難,所以采用無人機傾斜攝影的技術來獲取邊坡表面地質信息數據。
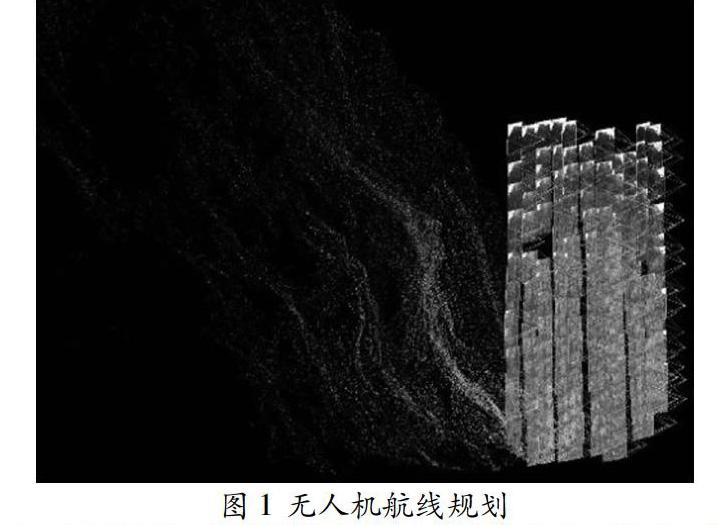
(2)航線規劃:在地面控制站軟件中進行航線規劃,航向重疊率為70%,旁向重疊率為50%,飛行相對高度為110m,航線總長度為1554m,飛行時間為10min,覆蓋整個巖質邊坡。如圖1所示。
(3)飛行作業:本試驗用大疆無人機進行飛行作業,在地面控制點上設定無人機飛行航線,利用無人機的自動飛行模式進行傾斜攝影,從而獲取邊坡表面的數字航攝影片。
(4)數據處理:整理本次航線所采集的航攝相片,使用無人機配套的數據處理軟件Pix4D mapper來提取每張相片的影像數據,轉換成地理信息產品,如圖2(a)所示。
2.2 三維激光掃描儀獲取點云數據
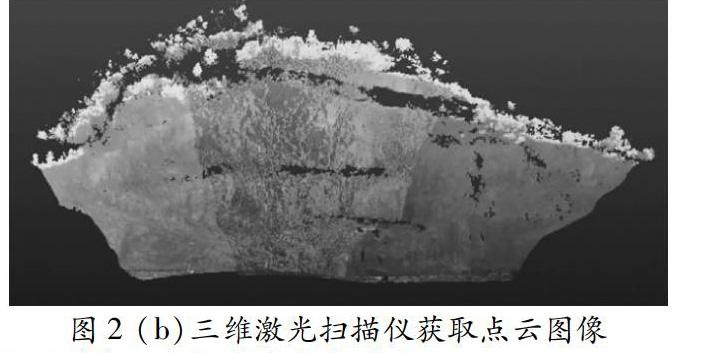
根據掃描目的與精度要求,結合邊坡周邊環境,考慮到Topcon三維激光掃描儀獲取數據的特點,采用遠景掃描,架三個站點,每個站點的位置根據現場情況布設,力求掃描范圍較大,遮擋物較少。每站掃描完成后,檢查點云數據是否完整,確保最后得到精確可靠的點云數據,每兩站點掃描到的點云重復部分應大于掃描范圍的百分之三十,以便后期能準確地進行點云數據拼接。采用該三維激光掃描儀配套的后處理軟件Scan Master對掃描到的點云數據進行拼接以得到完整的邊坡表面地質信息。該處邊坡掃描到的點云數據如圖2(b)所示。
2.3 兩種點云數據獲取方式對比
地面三維激光掃描儀以其靈活快速、非接觸測量的方式,可以解決山陡危險地形的掃描,并且可以快速得到高精度的測量成果,然而使用三維激光掃描儀獲取邊坡地質信息,在特殊復雜的地形條件下,無法找到合適的觀測地點以架設儀器。并且在實際工程應用中,山坡頂部、階梯等容易成為掃描盲區,測區情形往往比較惡劣,多植被、深谷,三維激光對植被過濾效果有限,導致獲取的點云數據空洞較多。
無人機航測以其操作簡便、機動靈活的優勢在地形復雜的山區中應用較多,相對三維激光掃描儀,無人機幾乎不存在測量盲區,且體積較小、攜帶方便,只是在精度上較三維激光掃描儀低。所以在大部分情況下我們優先選用無人機來獲取地質信息數據。
3 結語
本文以楊家山隧道某邊坡為研究對象,采用無人機與三維激光掃描儀獲取該邊坡表面三維地質信息,研究非接觸測量技術相比傳統測量技術的優勢。結果表明:
(1)和傳統數據采集方式相比,非接觸測量技術擁有非接觸性、數字化程度高、采集信息量大等特點。用三維激光掃描儀與無人機傾斜攝影技術來采集地質信息數據是值得提倡的。
(2)無人機與三維激光掃描儀以其靈活快速、非接觸測量的特點均可快速獲得大量地質信息數據。三維激光掃描儀在實際工程應用中,遇到坡體復雜的情況,會出現架站困難、掃描盲區過多的問題,導致獲取的點云數據空洞較多。而無人機相對于三維激光掃描儀,具有體積較小、攜帶方便的特點,且在獲取圖像信息的過程中幾乎不存在盲區,所以在實際應用中采用無人機傾斜攝影技術較好。
參考文獻:
[1]楊帆,董景利,薛偉,等.三維激光掃描技術及其相關軟件在建模方面的應用[J].地礦測繪,2012,28(03):21-23+29.
猜你喜歡
電腦知識與技術(2016年28期)2016-12-21 12:21:32
電子技術與軟件工程(2016年19期)2016-12-19 18:28:28
新教育時代·教師版(2016年27期)2016-12-06 18:14:59
中國科技縱橫(2016年17期)2016-11-30 11:51:57
農機使用與維修(2016年10期)2016-11-10 09:45:55
人間(2016年26期)2016-11-03 17:52:40
中國科技博覽(2016年22期)2016-11-01 18:10:31
科技視界(2016年22期)2016-10-18 14:30:27
企業導報(2016年9期)2016-05-26 20:58:26
