北斗衛星定位技術在邊坡位移監測中的應用
2020-02-24 08:27:58王健偉王磊
鐵道建筑 2020年1期
王健偉 王磊
(1.鐵科院(深圳)研究設計院有限公司,廣東深圳 518000;2.深圳地質災害監控工程實驗室,廣東深圳 518000;3.中鐵十一局集團第六工程有限公司,湖北襄陽 441003)
全世界有60 多個國家和地區長期受到邊坡地質災害的影響,它與地震、火山噴發并稱為全球三大地質災害。邊坡的位移監測是驗證邊坡地質災害的加固效果、邊坡穩定程度和指導施工動態設計的重要手段。目前邊坡位移監測中采用自動化監測的較少,多采用全站儀、經緯儀等光學監測措施進行人工觀測。后期人工監測管理的成本較高,隨著時間的推移,傳統監測人工成本與日俱增。當測點較多、工作量較大時,傳統手動式監測便顯露出其不足之處:效率低、監測數據不連續、環境干擾大,尤其是在雨季等惡劣天氣條件下,人工監測難度高[1],難以及時給出監測數據,環境因素一定程度上也影響到采集精度。人工監測不到位會導致邊坡地質災害的預警滯后,造成人民生命財產的損失,而自動化監測不受天氣環境影響,能持續不間斷地實時監測。因此,實施自動化監測、實時掌握邊坡土體變形特征對保障后期長期運營管理的安全極為重要,也可對加固治理效果評價提供有效的數據支撐,對邊坡及周邊人民財產安全具有重要的現實意義。
隨著國家北斗衛星導航系統(Beidou Navigation Satellite System)的逐步發展,基于北斗衛星定位的位移監測技術逐步應用于各類工程,能夠實現邊坡自動化位移監測[2]。本文在深圳一凝灰巖蠕變型邊坡監測項目中引入北斗位移自動化監測系統,對基于北斗衛星定位的位移監測技術進行研究。
1 北斗定位原理
北斗衛星定位共需要4 顆衛星,每2 顆衛星到用戶機的距離為半徑的2個球體會相交于2個點,設4顆衛星到用戶機的距離分別為R1,R2,R3,R4[3]。

式中:xi,yi,zi為第i顆衛星的坐標;c為光速;tr為接收機測得的信號到達時間;dtr為接收機與衛星的鐘差;tsi為衛星測得的信號發射時間。
以上4 個方程可以解出4 個未知數,可得到測站的坐標。為提高北斗測量精度,使用RTK 技術將一臺接收機置于基準站上,另一臺或幾臺接收機置于載體(稱為流動站)上。基準站和流動站同時接收同一時間、同一北斗衛星發射的信號。基準站實時地將測量的載波相位觀測值、偽距觀測值、基準站坐標等用無線電傳送給運動中的監測站。監測站同時接收基準站數據與北斗衛星數據進行差分處理,得到基準站和流動站基線向量(Δx,Δy,Δz)。基線向量與基準站坐標結合換算得到流動站每個點WGS84坐標,最后通過坐標轉換參數轉換得出流動站每個點的平面坐標x,y和正常高h。基于RTK 原理、利用衛星定位以及對測量數據的后處理技術的北斗位移測量設備[4]由于數據量較大,測量數據的后處理會有一定的滯后。北斗監測設備必須有基準站置于穩定區上,一般設在無遮擋且穩定的基巖上,北斗監測設備布置如圖1 所示。北斗監測設備靜態位移測量精度達到毫米級[5]。
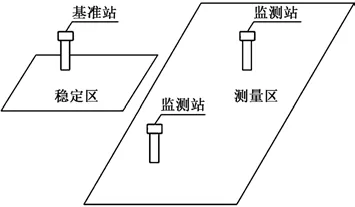
圖1 北斗監測設備布置示意
2 北斗監測設備標定
姚仰平等[6]將北斗定位監測設備安裝在壓路機上,根據北斗定位提供的位置信息對施工過程進行監控。由此可見將北斗定位應用在位移監測上是可行的,但應用在邊坡位移監測上精度是否滿足要求,需對北斗定位設備進行標定[7]。標定系統由標定臺、北斗工作站、北斗基站組成。實驗室設計加工的中間件將北斗工作站與位移標定臺連接固定。通過程序設定標定臺的位移,帶動連接的北斗工作站的移動,記錄北斗實測位移與標定臺位移,對比分析標定數據來獲取北斗工作站的精度。
具體標定過程如下:
1)將北斗監測設備固定安裝在標定臺上,北斗監測設備可隨標定臺移動;
2)將標定臺連接計算機,通過標定臺控制程序指定標定臺的水平位移和垂直位移;
3)靜置觀測1 d 后記錄北斗監測設備所測得的位移;
4)將北斗監測設備測得的位移與標定臺精確位移對比,得出北斗監測設備的精度。
選取基準站與監測站距離為0.1,3.2 km,各進行2組精度標定試驗,試驗結果見表1。
將標定臺水平位移控制在8 mm,若北斗位置實測數據在最小值7 mm 和最大值8 mm 間波動,則認為北斗工作站精度在1 mm 內。由表1可知:當基準站距離監測站3.2 km 時,水平精度約為2 mm,垂直精度約為5 mm;當基準站距離監測站0.1 km 時,水平與垂直精度均維持在1 mm以內。
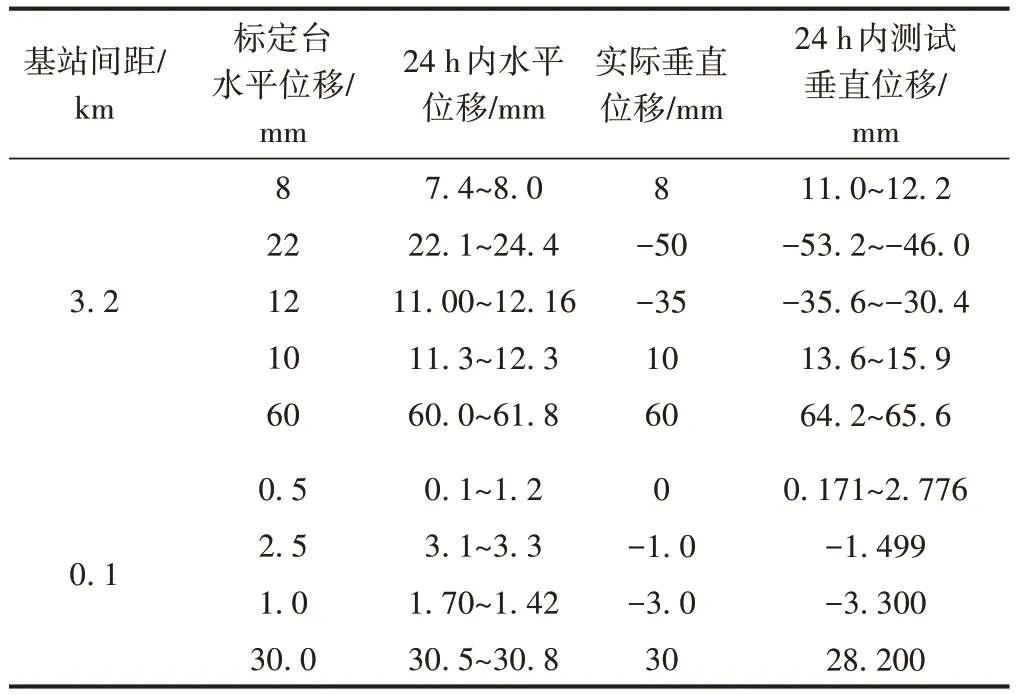
表1 北斗監測設備標定結果
3 實例應用
實例邊坡位于惠深沿海高速一收費站的東側(圖2),在原始邊坡地形中自然坡腳約為20°~30°,最大開挖高度為32 m,開挖坡度為35°~45°,該邊坡于2017 年旱季開挖施工完成。不利的地質條件和長時間降雨可能誘發邊坡變形破壞[7-8],并且設計排水設施不足。2018 年9 月雨季來臨時地下水位暴漲,人工監測顯示邊坡產生較大位移,且在持續增加。

圖2 實例邊坡位置地形示意
根據邊坡已有的人工監測資料,選取K28+500 斷面位移最大處布設北斗監測設備,主要觀測邊坡的水平位移。北斗監測設備點位布置如圖3所示。

圖3 北斗位移監測點位
采用自動化監測本質上是為了降低監測成本自動化監測在邊坡變形監測上逐步應用[8-10]。北斗監測設備主要分為定位模塊、供電模塊和信號通信模塊。通信模塊包括4G 信號傳輸卡和天線,與北斗定位模塊集成在立柱上方的控制盒中,安裝在立柱的頂部。太陽能板安裝在立柱中部,將太陽能存儲轉化為電能存儲于配電箱電瓶中,為頂部的北斗模塊及通信模塊供電。
試驗期間在北斗監測站立柱處同步安裝全站儀棱鏡,對比北斗監測數據與全站儀監測數據可知,2 組數據基本變形趨勢相同,8月10號至8月24日、8月27日至9 月1 日2 個降雨時段都存在較大的位移。BD3監測數據由于全站儀棱鏡觀測問題,未安裝在北斗設備的立柱上,數據相差較大,因此未與全站儀數據對比。BD1,BD2 北斗設備與全站儀監測數據對比見圖4。
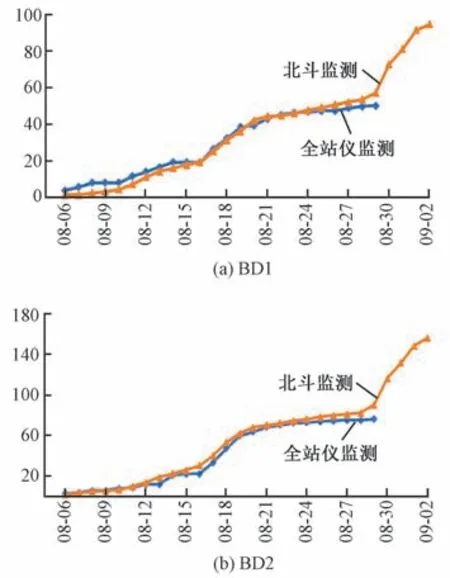
圖4 BD1、BD2北斗設備與全站儀監測數據對比
8 月 30 日至 9 月 2 日,深圳突發百年一遇特大降雨,可視性極差,位移監測所用的棱鏡上附著大量水珠,完全不具備人工監測條件,故全站儀監測數據缺失,北斗監測數據正常。由圖4可知,除去人工觀測誤差,邊坡總體變形趨勢基本相同。
驗證北斗位移監測的可用性,需對BD1,BD2 的2 種監測結果進行假設檢驗分析[11]。原假設為:北斗監測與全站儀監測2種觀測手段對位移數據無顯著性影響。顯著性計算結果見表2。
由表 2 可知,BD1 和 BD2 的 2 種監測方式監測數據方差分析結果組間數據P值為0.851 6 與0.748 7,均大于0.05,故接受原假設,2種監測手段的觀測數據無明顯差別。
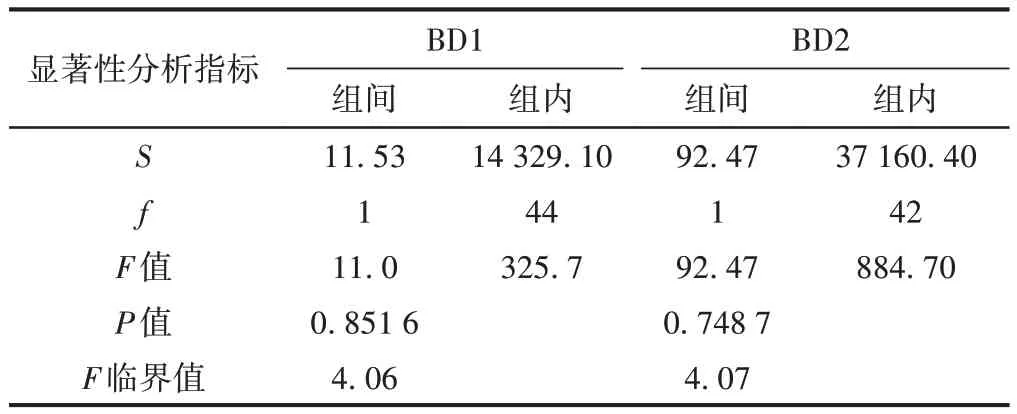
表2 顯著性計算結果
4 結語
1)標定數據顯示,北斗基站與監測站的距離越近精度越高,北斗監測設備的水平測量精度達到2 mm,垂直測量精度為5 mm。
2)北斗監測設備的自動化監測方式應用在邊坡監測上是可行的;
3)北斗監測與全站儀監測數據吻合較好,數據無顯著差別,與全站儀監測的對比驗證了北斗監測數據的可靠性,基本去除了人工觀測的誤差;
4)根據現場試驗期間有暴雨、臺風極端天氣情況,北斗實現的全自動化監測影響不大,相比全站儀人工監測,可用性較強。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
北京測繪(2020年12期)2020-12-29 01:37:18
工程與建設(2019年3期)2019-10-10 01:40:18
經濟技術協作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
工業設計(2016年12期)2016-04-16 02:52:00
電測與儀表(2016年9期)2016-04-12 00:29:52
設備管理與維修(2015年12期)2015-04-09 06:57:00
消費者報道(2014年7期)2014-07-31 11:23:57
吉林地質(2014年3期)2014-03-11 16:47:31