精確定位及計算機視覺技術在三峽、葛洲壩船閘智能引泊上的應用
2020-02-26 06:28:30蒲浩清
水運工程 2020年2期
關鍵詞:船舶
江 濤,陳 沖,蒲浩清
(長江三峽通航管理局,湖北 宜昌 443002)
船閘運行管理中對船舶進出閘、系纜靠泊的監管是運行人員的兩項重要工作。三峽、葛洲壩船閘目前對于船舶過閘行為的監管主要依靠圖像監控系統,存在下列問題:1)針對船舶超速、越界、靠泊不到位等方面的監測沒有直觀、量化的指標,可能導致觀察偏差;2)在惡劣天氣、低能見度、船舶遮擋等客觀條件下,對于浮式系船柱系纜等環節無法進行準確的監測。根據葛洲壩船閘運行數據,1個有載閘次(以一號閘為例)整個流程的時間為60~80 min,其中設備運行時間僅為25 min,大量的時間消耗在船舶進出閘和靠泊的過程中,因此通過精確定位和計算機視覺技術的應用解決上述2個問題以提高船舶進出閘效率和船閘運行管理水平,并最終實現過閘智能引泊具有良好的前景[1]。
1 閘室內精確定位
1.1 衛星定位
基于全球定位系統進行單點定位,其精度一般為5~10 m。如果采用差分定位,理想狀況下精度可達0.05 m。結合三峽、葛洲壩船閘所在區域的基站建設現狀,考慮使用實時動態差分技術(RTK),利用衛星載波相位觀測值進行實時動態相對定位。進行RTK測量時,位于基準站上的接收機通過數據通信鏈,實時地把載波相位觀測值以及基準站坐標等信息發給附近的流動站,流動站的用戶根據基準站及自己所采集的載波相位觀測值實現實時相對定位,進而求得流動站點的實時三維坐標。
1.2 3D掃描全站儀定位
3D掃描全站儀是一種集水平角、垂直角、距離(斜距、平距)、高差測量功能于一體的測繪儀器系統,可作為數據采集裝置,負責閘室內船舶動態數據的無接觸采集。采集的數據通過線纜或無線局域網實時傳輸至數據服務器。數據服務器將同一時刻的數據按固定格式打包發送至數據處理終端。數據處理終端處理實時接收到的原始數據,并自動進行特定點(船首、船尾、船上系纜樁等)數據的提取,將成果發送至運行管理顯示終端。運行管理顯示終端根據閘室及其附屬設施底圖和閘室內動態船舶數據生成實時顯示界面,供運行管理單位指揮船舶靠泊指定的區域和浮式系船柱,同時向用戶終端實時發送經簡易化處理后的導航數據供用戶使用。
1.3 技術對比
2種定位技術都能實現高精度數據采集。全球定位系統數據是單點的采集,如果需要采集單個過閘船舶上的多個通航關鍵特征點,則須通過加密安裝流動站點,以獲取其三維坐標信息,多艘船舶須一致安裝,或提前知曉過閘船舶的準確幾何尺寸及流動站天線安裝位置,通過計算獲取特征點的三維坐標。這無形中增加了單船定位的數據成本和獲取準確數據的基礎工作量。全球定位系統實時差分定位效果,不僅受船閘水工建筑物遮擋衛星信號的影響,還受大面積水域電磁波信號的多次反射的干擾。
3D掃描全站儀則可通過非接觸的方式,即時獲取面狀點云數據,只須在通航水工建筑物上合適地點固定安裝設備、布設數據傳輸鏈即可。但3D掃描全站儀需要點對點直接可視,由于閘室水位起伏、閘室內過閘船舶首尾遮擋等問題導致獲取的點云數據不全,存在遺漏。
1.4 定位方式選擇
全球衛星定位系統實時差分定位綜合效果不及全站儀,且需要船載終端的硬件支持,廣泛應用推廣成本較高;全站儀技術成熟,但對閘室內船舶間遮擋問題不能很好地解決,系統集成化程度相對較低。綜合考慮航運管理的發展要求和技術更新的趨勢,衛星精確定位系統在船閘智能引泊中具有更好的應用前景。
2 船閘智能引泊
2.1 系統結構設計
船閘智能引泊系統在結構上可分為基礎層、數據層、服務層、業務邏輯層和展現層。
1)基礎層:主要為系統提供設施的支持,包括硬件設置和網絡環境部分。
2)數據層:主要包括船舶精確定位數據、船舶屬性數據、用戶數據、系統基礎數據。
3)服務層:主要為系統提供數據接收、傳輸和存儲服務,起到數據層與業務邏輯層直接的互動作用。
4)業務邏輯層:通過與數據層交互,獲取數據后進行數據分析處理、業務邏輯運算等。
5)展現層:將系統分別展現給船方和船閘運行人員使用,分別為船舶的移動端、船閘運行調度系統及其他管理系統等。
2.2 應用展示設計
展示內容包括船閘水工建筑、船舶仿真圖形、船舶行駛信息、管理交互界面等,考慮到三峽、葛洲壩水利樞紐的安全要求,向船方推送的信息不涉及建筑物坐標、高程等數據,僅以相對距離、仿真圖形的形式進行展示(圖1)。
智能引泊系統面對船方通過管理單位微信公眾號或手機APP進行實時服務,面對管理單位則通過開發運行管理軟件實現功能(表1)。
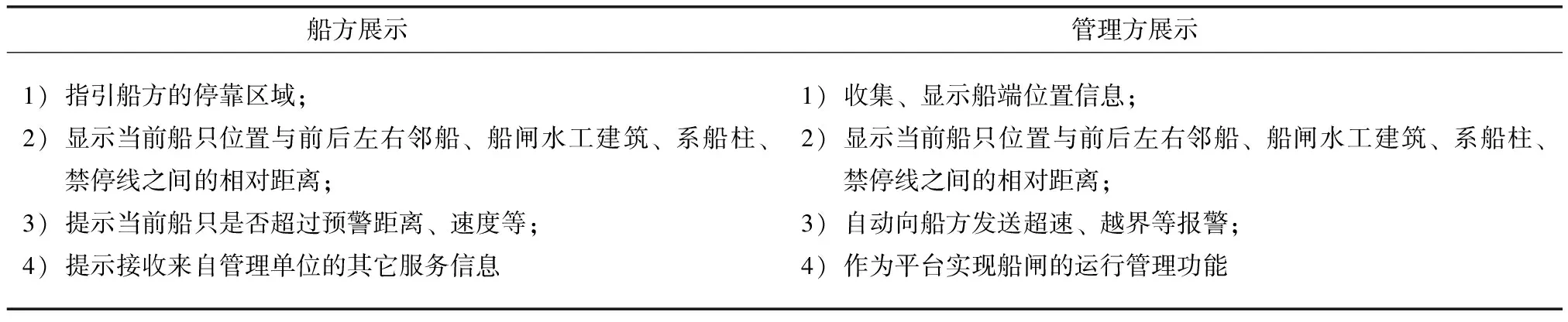
表1 智能引泊系統功能展示
2.3 應用難點
衛星定位在船舶智能引泊應用中最大的難點是船舶(終端安裝位置)差異化的問題。過閘船舶衛星定位的結果為單點坐標,實際應用則需要定位船舶的整體輪廓,船舶定位終端安裝位置的不確定性是定位輪廓的主要難點。對此須同時利用其他檢測技術,如視頻識別、激光掃描等,通過特征點(船頭、船尾、兩側船舷)多點檢測結合適當的算法計算單點坐標相對于整體輪廓的距離,最終計算出船舶輪廓的坐標信息。
3 衛星定位效果分析
3.1 實船測試
采用RTK技術的衛星定位在復雜外界條件下的穩定性和可靠性不及全站儀測量。為驗證其實際效果,對在三峽船閘進行的北斗、GPS、GLONASS多星系實船試驗相關測試情況進行分析(圖2),測試設備主要包括1個基準站、1個移動站、2個多系統多頻測試天線[2]。
測試全過程船舶位置的經緯度信息基本穩定連續,上行數據中因船在上閘首區域受事故門橋機遮擋存在個別斷點,其精度在固定解的情況下達到厘米級。

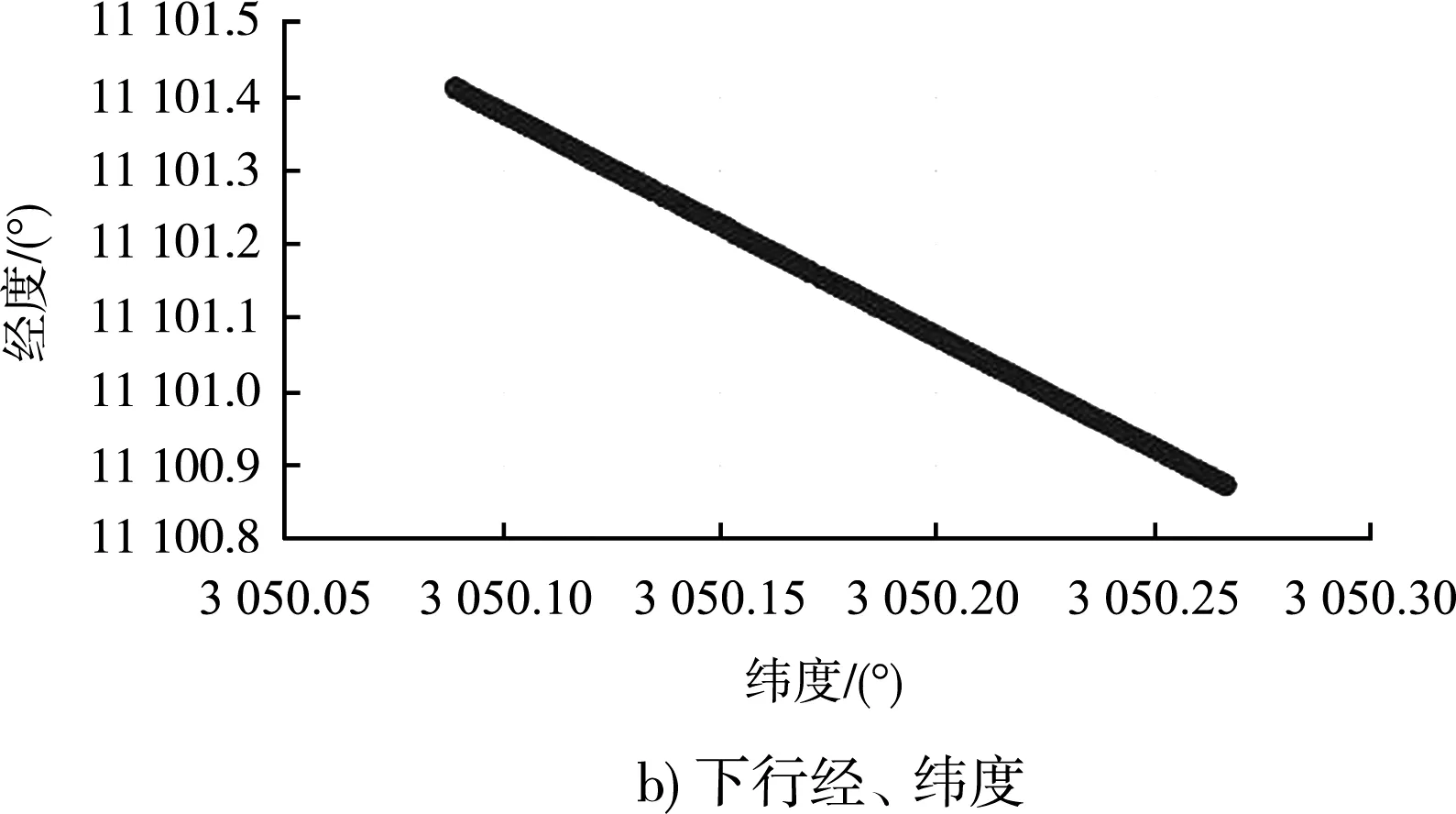
圖2 上行、下行經緯度測試結果
解算相關方程需要4顆觀測衛星,在實際測量過程中,上行和下行時移動站北斗衛星、GPS衛星和GLONASS衛星總數一般在14顆衛星左右,滿足測量要求。上行測試一共4 785個歷元,平均衛星數是17.05顆,下行測試一共6 186個歷元,平均衛星數是15.7顆(圖3)。
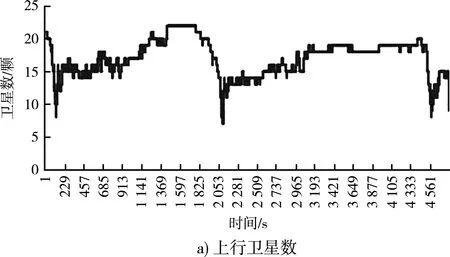
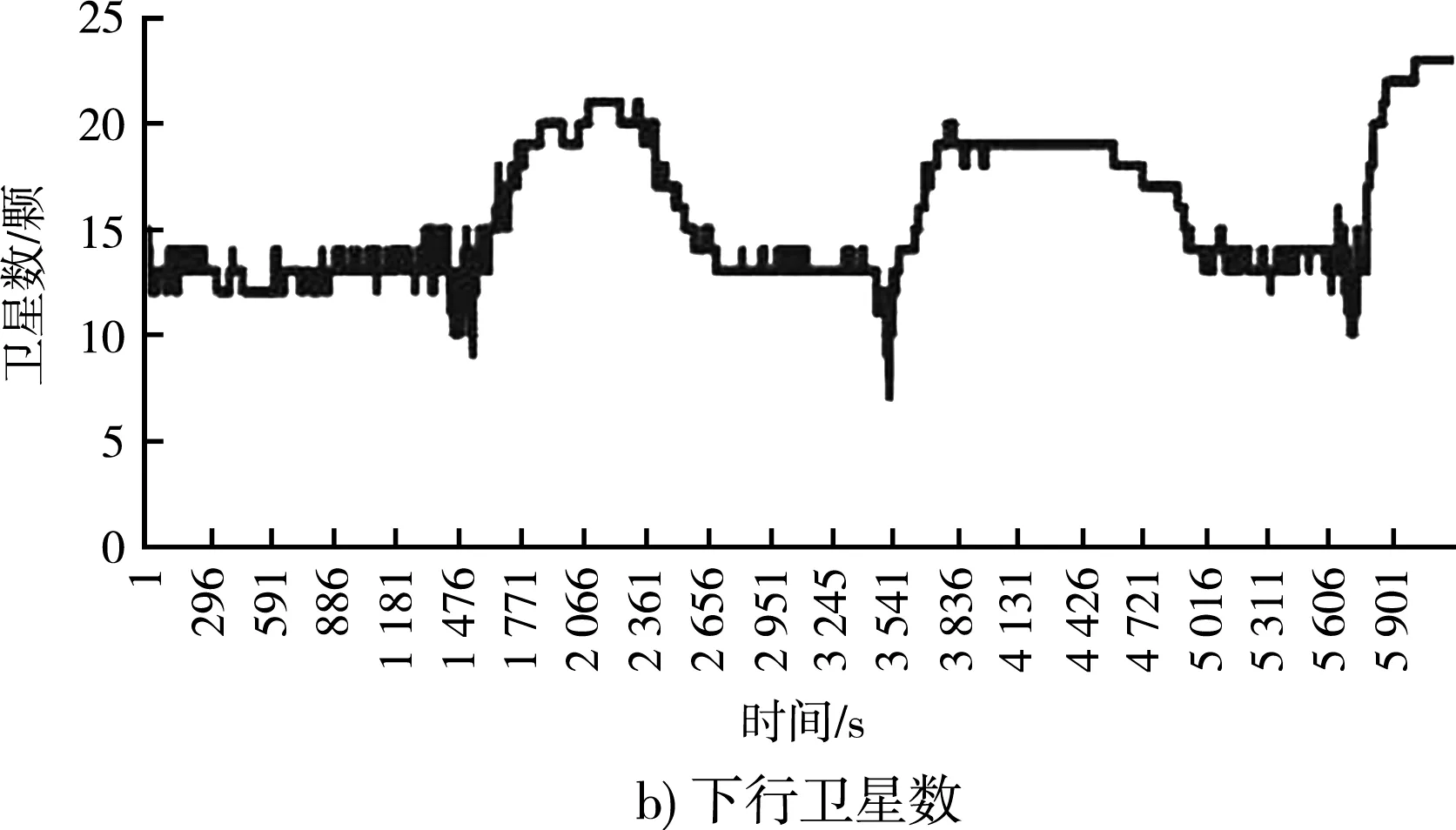
圖3 上、下行衛星數測試結果
在測量過程中,在固定解的情況下測量精度可以達到標稱精度,在浮點解的情況下精度會有一定程度的下降。根據實測數據統計,在上行4 785個歷元中固定解狀態有4 778個歷元,7個歷元處于浮點解的狀態,在下行的過程中所有歷元均處于固定解狀態。
船舶航向通過船上的2個天線所在的方向與正北方向的夾角得出,在水位較低時航向失鎖會使航向急劇變化,不過可以通過定位加算法進行補充。
3.2 極端狀態分析
船舶在三峽、葛洲壩船閘上游水位時,對空情況良好,衛星信號穩定,但到下游水位時,由于閘墻、閘門的遮擋,對空面積大受影響,可能由于接收衛星數量不足無法定位。下面設計以葛洲壩2#船閘下游水位的極端不利條件進行近似計算。
地球半徑r≈6 400 km,定位衛星軌道高度H在距地面2.0萬~2.4萬km,H取最低值2.0萬km,可簡化看成半徑r(6 400 km)、R(2.64萬km)的2個同心球。三峽流域通航船舶高度基本為10~18 m(接收天線高度),船體寬度為13~19 m,葛洲壩下游通航水位39.0~54.5 m,2#船閘閘面高程為70 m,閘室尺寸為280 m×34 m(長×寬)。現選取最低下游水位(39 m)、最小尺寸船型(10 m高、13 m寬)、閘門全部關終、最小可視上空的極端條件:
閘室縱向可視角α≈85°,閘室橫向可視夾角β≈69°;
衛星軌道球面積S1=4πR2,地球外圍切面形成的球冠面積S2=2πRH;
極端條件下的可視面積S3(R相對于r較大,忽略偏心造成的誤差)S3≥(85180)×(69180)S2。
粗略得出:S3S1≥0.07,即極端條件下的可視面積相對于衛星軌道球面的大小,結合北斗、GPS和GLONASS各星系的衛星數量(包括非靜止和靜止)及軌道分布,對應估算出可視范圍內3個星系總接收衛星數應不少于5顆。
3.3 定位效果
從測試數據可知,上行和下行時移動站北斗衛星、GPS衛星和GLONASS衛星總數一般在14顆左右,極端情況下也能滿足6顆以上的解算要求,前述計算結果也大致符合,固定解比例情況均較好,在上行和下行過程中基本能解算位置信息,其經、緯度也無太大變化,與實地經、緯度一致,在整個測試過程中航向信息基本符合實際情況。
4 閘室內系纜檢測
4.1 基于計算機視覺技術的監測原理
船閘浮式系船柱在閘室兩側的閘墻軌道中隨水位上下浮動,工作環境惡劣,檢修時須垂直吊出,不便于直接在系船柱工作區域內或附近安裝傳感器及敷設線纜,考慮設備布置以及后期維護的便捷,建議利用計算機視覺技術對畫面局部(系船柱位置)進行定點圖像分析的方式實現監測功能。該系統設置適當位置的攝像點,針對閘室兩側的浮式系船柱設計預置點,利用船閘工控系統運行指令控制攝像機轉動、變焦、拍攝預置點圖像(浮式系船柱),圖像文件在終端進行數據處理,通過opencv、halcon類函數庫對系纜前后的系船柱局部圖像進行特征檢測對比,輸出監測及報警信息[3]。系統結構見圖4。
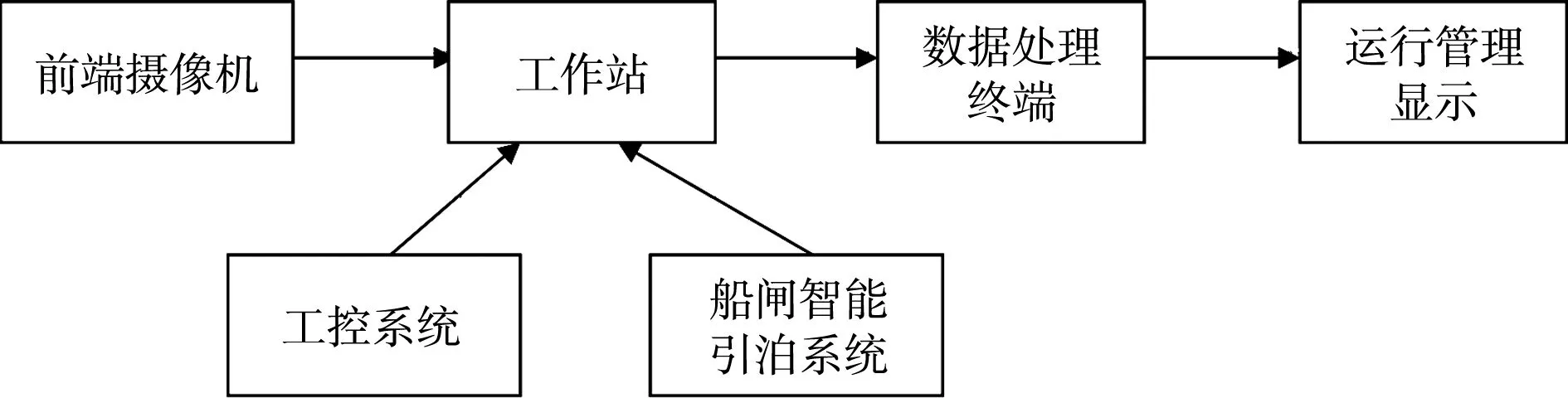
圖4 系船柱監測系統結構
4.2 應用難點
有效的視頻數據采集在實際應用中有2個技術難點:1)三峽、葛洲壩船閘單個閘室尺寸為280 m×34 m,觀測范圍較大,浮式系船柱數量較多,上、下游水位變化頻繁,攝像機在多個預置點間頻繁轉動、調整、變焦拍攝對云臺電機及傳動部分的穩定性、耐用性要求很高;2)浮式系船柱軌道布置在閘室兩側閘墻內,圖像特征范圍很小,同時為避免船舶的遮擋和靠泊時對閘墻邊安裝設備的刮蹭,攝像機安裝位置受限,造成圖像處理的困難(圖5)。針對上述問題須合理設置攝像機的點位并進行分區監測,增加整個圖像內的特征信息如特殊顏色的標靶或特征形狀的目標,并改進算法提高目標識別的效率,減少前端設備的工作壓力。

圖5 布置在閘墻內的系船柱
5 結論
1)采用RTK技術的多星系衛星精確定位基本可以忽略閘室低水位極端條件對衛星信號質量的影響,所需的船舶航向、輪廓定位等重要數據均可通過算法進行補充,滿足建設數字船閘智能引泊系統的必要條件。
2)采用圖像識別監測浮式系船柱因其攝像機安裝位置的靈活性,在功能設計、建設投資、后期維護方面都有明顯的優勢。
3)上述方案在技術成熟性和市場風險方面較為可控,已具有一些在鐵路、港口領域的類似應用和實船測試數據的支撐,是提高船閘運行管理水平、實現智能引泊的一個重要發展方向。
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:08:26
艦船科學技術(2022年14期)2022-09-22 03:07:40
機械工業標準化與質量(2022年6期)2022-08-12 02:07:42
艦船科學技術(2022年2期)2022-03-29 01:12:44
船舶(2021年4期)2021-09-07 17:32:22
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
軍工文化(2017年12期)2017-07-17 06:08:06
中國船檢(2017年3期)2017-05-18 11:33:09
船海工程(2015年4期)2016-01-05 15:53:30
