三峽升船機(jī)運(yùn)行控制中閉鎖的運(yùn)用及優(yōu)化
2020-02-26 06:28:32鄢玲祉鄭琴霞
水運(yùn)工程 2020年2期
鄢玲祉,鄭琴霞,李 飛,李 若
(長(zhǎng)江三峽通航管理局,湖北 宜昌 443002)
1 運(yùn)行工藝簡(jiǎn)介
三峽升船機(jī)運(yùn)行流程主要分為5個(gè)環(huán)節(jié),以上行為例,分為船廂與下游解除對(duì)接、船廂與主體設(shè)備解除對(duì)接、船廂上行、船廂與主體設(shè)備對(duì)接、船廂與上游對(duì)接。集控操作方式主要分為自動(dòng)運(yùn)行、分步運(yùn)行、手動(dòng)運(yùn)行。三峽升船機(jī)工藝流程與操作如表1所示。
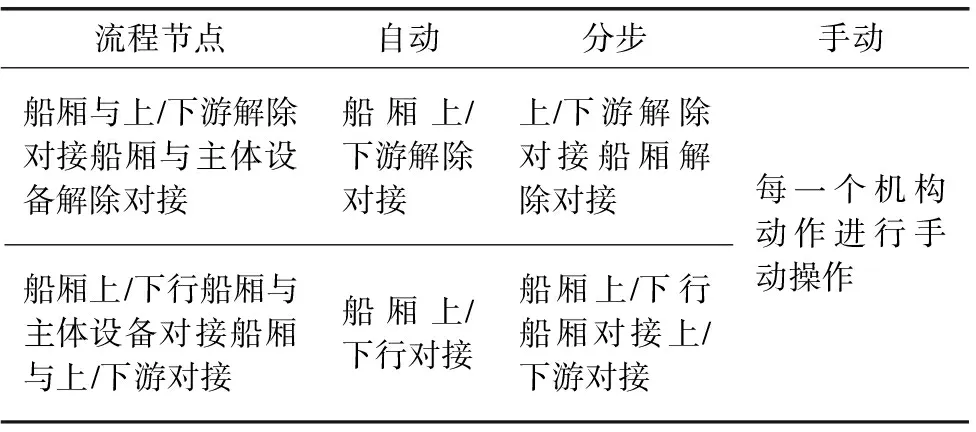
表1 三峽升船機(jī)工藝流程與操作(不含調(diào)整船廂水深時(shí)間)
2 閉鎖的作用與影響
2.1 運(yùn)行控制與閉鎖作用
三峽升船機(jī)運(yùn)行工藝流程自動(dòng)化程度及控制精度較高,工藝流程采用順序控制方式。流程的各環(huán)節(jié)有嚴(yán)謹(jǐn)和完善的邏輯關(guān)系和保護(hù),各現(xiàn)地控制站的動(dòng)作必須滿足相應(yīng)的站間閉鎖關(guān)系后方能動(dòng)作,即當(dāng)前一步動(dòng)作未完成時(shí),下一步動(dòng)作不能進(jìn)行。三峽升船機(jī)運(yùn)行控制系統(tǒng)主要包含集控站、流程站、安全站和現(xiàn)地站等,其中現(xiàn)地站是控制系統(tǒng)的作用單元,它包括上下閘首控制站、上下廂頭控制站及傳動(dòng)控制站,不僅各站內(nèi)部設(shè)有閉鎖條件,而且各站之間也有閉鎖保護(hù),形成了一個(gè)相互聯(lián)系相互制約的運(yùn)行控制系統(tǒng),現(xiàn)地控制站閉鎖關(guān)系如圖1所示。
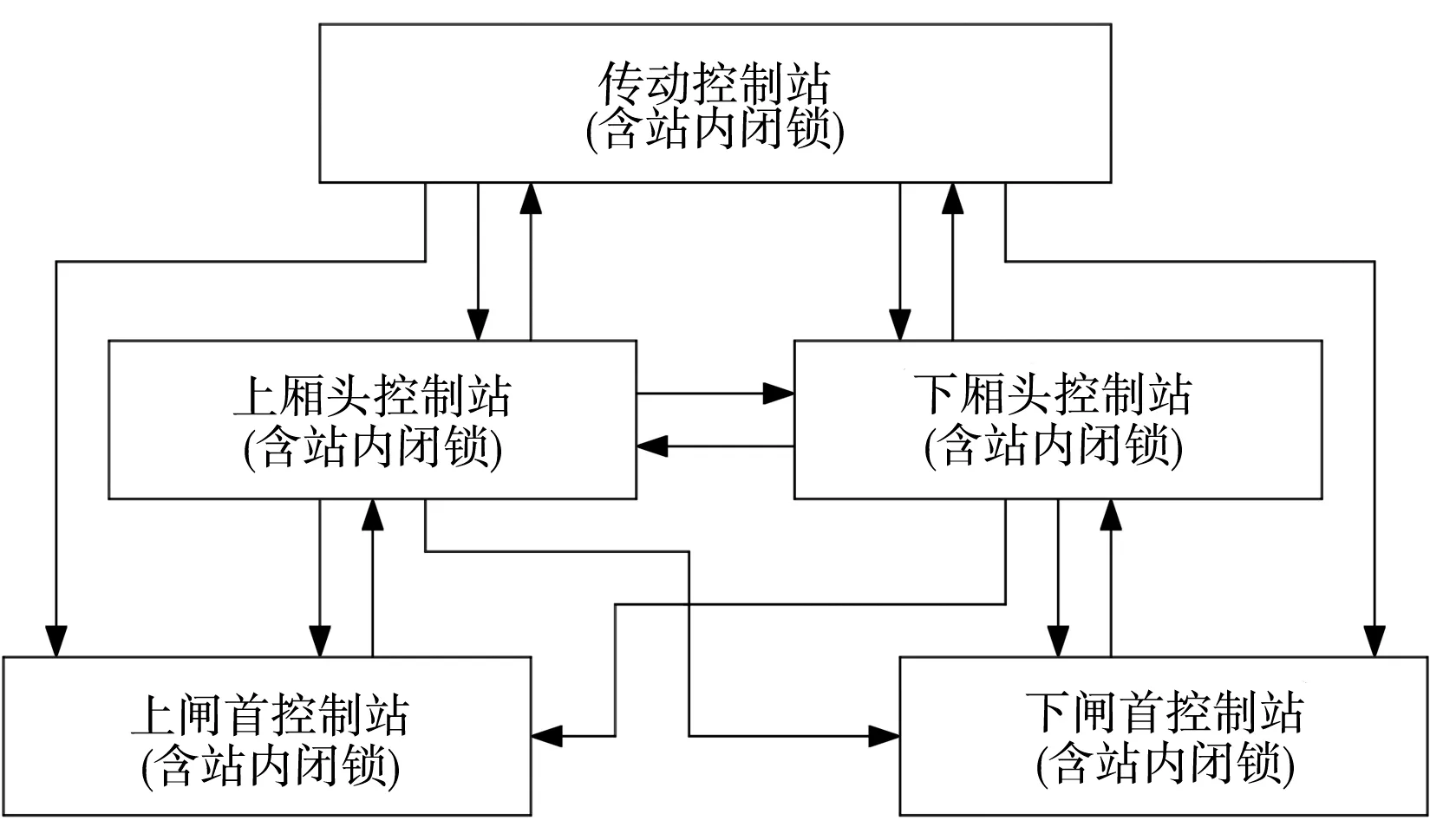
注:→箭頭指向表示存在閉鎖條件約束。
集控模式的3種操作方式閉鎖條件要求完全一致,每一個(gè)操作命令的下發(fā)都需要滿足對(duì)應(yīng)的閉鎖條件,才能夠有效執(zhí)行。三峽升船機(jī)工藝流程有25步,每一步都有一定的閉鎖保護(hù),上位機(jī)共有50條閉鎖,其中上閘首9條、上廂頭13條、傳動(dòng)站8條、下廂頭13條、下閘首7條,環(huán)環(huán)相扣,保障運(yùn)行工藝流程和機(jī)構(gòu)的安全運(yùn)行。
除了常用的集控操作模式,還有現(xiàn)地和檢修操作模式,作為故障處理和特殊操作使用,也有相應(yīng)的閉鎖要求。本文僅對(duì)集控流程的閉鎖條件進(jìn)行研究。
2.2 閉鎖條件對(duì)運(yùn)行的影響
三峽升船機(jī)試通航運(yùn)行初期,由于閉鎖條件不滿足而導(dǎo)致的停機(jī)故障出現(xiàn)較多,嚴(yán)重影響了運(yùn)行效率。2017年1—7月,不間斷運(yùn)行廂次、艘次較多,故障典型最能體現(xiàn)初期運(yùn)行控制狀態(tài),7—10月進(jìn)行了升船機(jī)試通航以來(lái)第1次大規(guī)模停航優(yōu)化改造,因此選取該階段運(yùn)行情況作為分析的原始信息。2017年1—7月試通航期間非閉鎖停機(jī)和閉鎖停機(jī)故障見(jiàn)表2。

表2 2017年1—7月停機(jī)故障
在此期間,共發(fā)生432次停機(jī)故障,其中由于閉鎖條件不滿足導(dǎo)致停機(jī)故障122次,相當(dāng)于每月均有62次停機(jī)故障,因?yàn)殚]鎖條件不滿足的停機(jī)故障18次。經(jīng)統(tǒng)計(jì),出現(xiàn)頻率最高的閉鎖停機(jī)故障有對(duì)接鎖定信號(hào)丟失、開(kāi)船廂門(mén)、進(jìn)出廂和調(diào)整船廂水深等,其影響及發(fā)生情況如表3所示。
自然功率因數(shù)是供配電系統(tǒng)未輸入無(wú)功補(bǔ)償裝置時(shí)的有效功率與無(wú)功補(bǔ)償裝置輸入配電系統(tǒng)后的功率之比。自然功率因數(shù)的選擇可以有效改善整個(gè)動(dòng)力系統(tǒng)。為了實(shí)現(xiàn)這一目標(biāo),可以減少線路損耗并減少無(wú)功功率和恒定有功功率下的負(fù)載電流負(fù)載,可以使用改進(jìn)的自然功率因數(shù)無(wú)功功率補(bǔ)償器實(shí)現(xiàn)就地補(bǔ)償。該補(bǔ)償器可以減少無(wú)功功率傳輸線損耗并實(shí)現(xiàn)電氣工程中的節(jié)能目標(biāo),達(dá)到電氣工程節(jié)能的目的[9]。

表3 2017年1—7月常見(jiàn)閉鎖停機(jī)故障
3 閉鎖停機(jī)影響的應(yīng)對(duì)方法
上位機(jī)的閉鎖條件不滿足而引起的停機(jī)故障大致可以分為:1)水位條件不滿足;2)傳感檢測(cè)信號(hào)丟失不滿足;3)機(jī)構(gòu)執(zhí)行動(dòng)作未到位。當(dāng)閉鎖條件不滿足時(shí),操作員應(yīng)以更高效的方法進(jìn)行操作,減少閉鎖丟失導(dǎo)致故障停機(jī)的時(shí)間,縮短船舶在船廂滯留時(shí)間,降低閉鎖停機(jī)故障帶來(lái)的影響。下面分別分析試通航運(yùn)行中出現(xiàn)頻率最高的開(kāi)船廂門(mén)、對(duì)接鎖定信號(hào)丟失和調(diào)整船廂水深中斷3個(gè)典型的閉鎖停機(jī)影響的應(yīng)對(duì)方法。
3.1 閉鎖停機(jī)應(yīng)對(duì)方法
3.1.1開(kāi)船廂門(mén)動(dòng)作停止的應(yīng)對(duì)操作
對(duì)于水位波動(dòng)不滿足條件引起的閉鎖,操作員應(yīng)了解當(dāng)日水位變化趨勢(shì),對(duì)關(guān)鍵水位做到心中有數(shù)。當(dāng)船廂對(duì)接時(shí),憑借水位信息系統(tǒng)等手段觀察水位變化趨勢(shì),提前預(yù)判。遇到開(kāi)船廂門(mén)過(guò)程中動(dòng)作停止時(shí),操作員要提醒船方,出廂信號(hào)燈變綠以后再解纜出廂,避免提前解纜后因?yàn)樗徊▌?dòng)導(dǎo)致船舶在船廂來(lái)回漂移。應(yīng)對(duì)和操作流程如圖2所示。
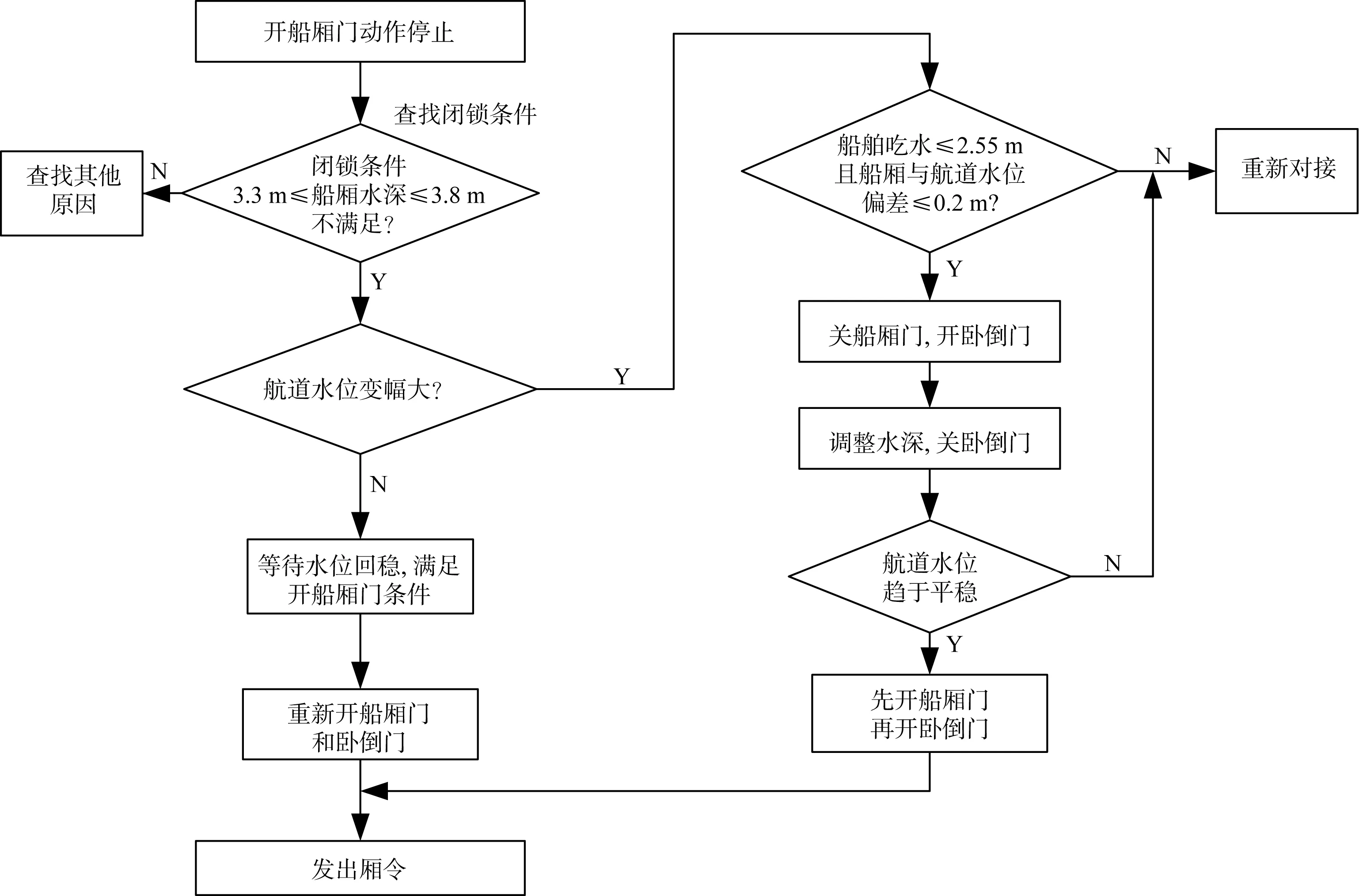
圖2 開(kāi)船廂門(mén)動(dòng)作停止后集控應(yīng)對(duì)流程
由于水位波動(dòng)是不可避免的,所以操作員要謹(jǐn)記關(guān)鍵水位數(shù)值,提前觀察水位,做到防范于未然,才能減少水位波動(dòng)不滿足條件的閉鎖停機(jī),提高運(yùn)行穩(wěn)定性。常見(jiàn)的與水位波動(dòng)有關(guān)的閉鎖條件如表4所示。
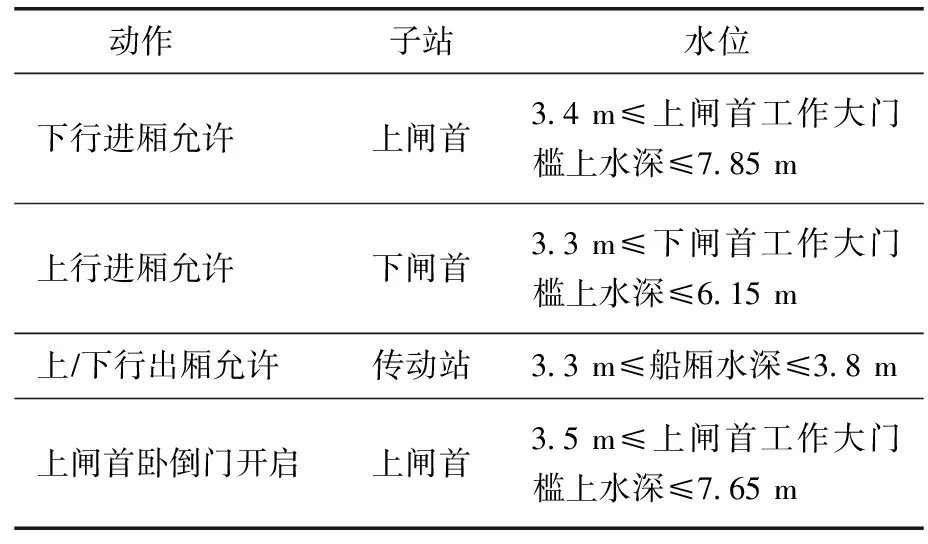
表4 閉鎖條件中常見(jiàn)的水位值
續(xù)表4
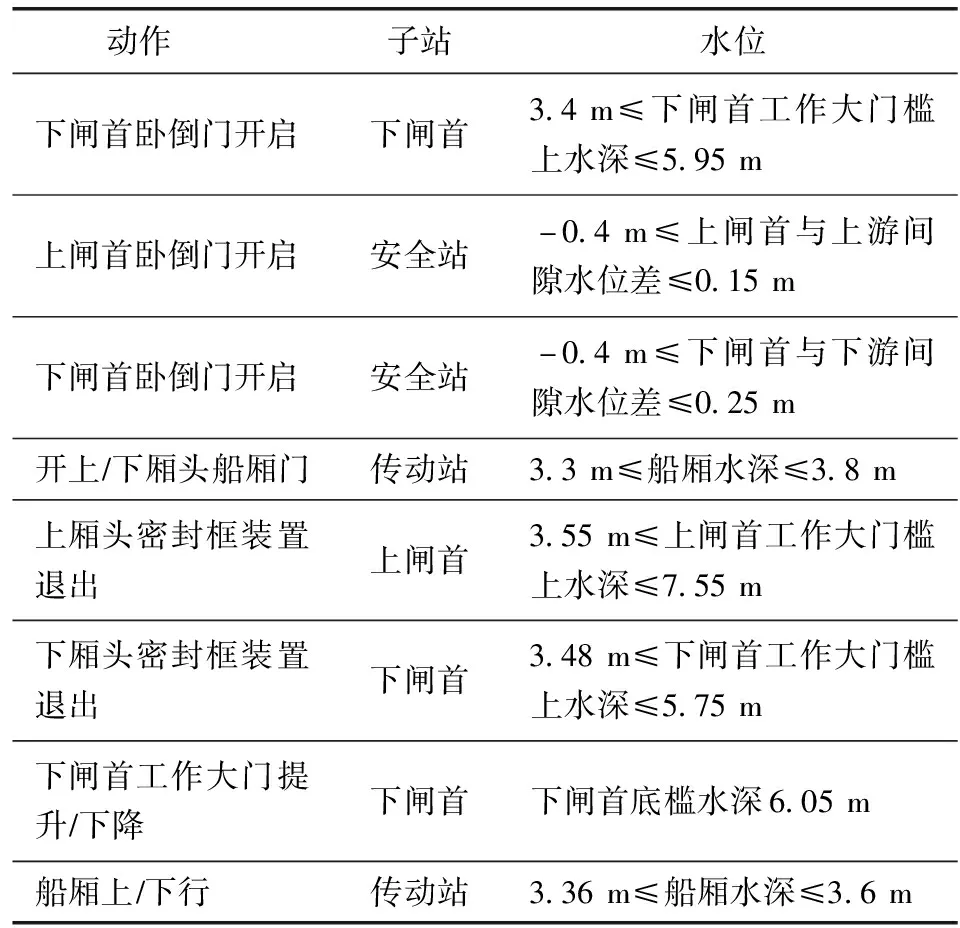
動(dòng)作 子站水位下閘首臥倒門(mén)開(kāi)啟下閘首3.4m≤下閘首工作大門(mén)檻上水深≤5.95m上閘首臥倒門(mén)開(kāi)啟安全站-0.4m≤上閘首與上游間隙水位差≤0.15m下閘首臥倒門(mén)開(kāi)啟安全站-0.4m≤下閘首與下游間隙水位差≤0.25m開(kāi)上∕下廂頭船廂門(mén)傳動(dòng)站3.3m≤船廂水深≤3.8m上廂頭密封框裝置退出上閘首3.55m≤上閘首工作大門(mén)檻上水深≤7.55m下廂頭密封框裝置退出下閘首3.48m≤下閘首工作大門(mén)檻上水深≤5.75m下閘首工作大門(mén)提升∕下降下閘首下閘首底檻水深6.05m船廂上∕下行傳動(dòng)站3.36m≤船廂水深≤3.6m
從表4總結(jié)出上位機(jī)關(guān)鍵水深節(jié)點(diǎn)范圍,見(jiàn)表5。
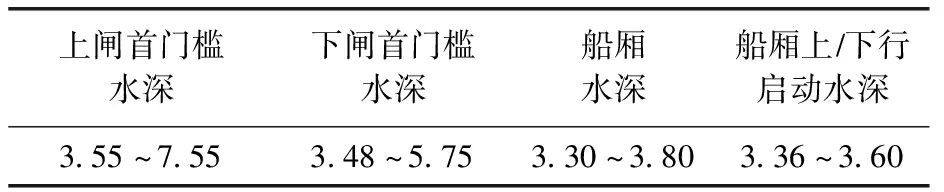
表5 操作員重點(diǎn)關(guān)注的水深范圍 m
3.1.2對(duì)接鎖定信號(hào)丟失的應(yīng)對(duì)操作
操作員要準(zhǔn)確把握是信號(hào)不穩(wěn)定導(dǎo)致丟失,還是機(jī)構(gòu)異常。當(dāng)發(fā)生此類故障時(shí),操作員首先在界面上查看機(jī)構(gòu)狀態(tài),現(xiàn)地人員去現(xiàn)場(chǎng)觀察開(kāi)關(guān)是否觸發(fā),確認(rèn)無(wú)誤后,重新發(fā)令,使丟失信號(hào)到位。若對(duì)接鎖定信號(hào)丟失,船廂長(zhǎng)時(shí)間處于與航道對(duì)接狀態(tài),水位呈現(xiàn)上漲趨勢(shì)致使船廂水深處于較高位(> 3.6 m),導(dǎo)致對(duì)接鎖定機(jī)構(gòu)受力較大,對(duì)接鎖定塊發(fā)生位移,超出機(jī)械開(kāi)關(guān)控制行程范圍,使鎖定信號(hào)丟失,可進(jìn)行如圖3的操作。

圖3 對(duì)接鎖定信號(hào)丟失集控應(yīng)對(duì)流程
3.1.3調(diào)整船廂水深中斷的應(yīng)對(duì)操作
調(diào)整船廂水深流程中斷,此故障發(fā)生概率較大的原因是閘首門(mén)因水位波動(dòng)產(chǎn)生較小的向上位移,使臥倒門(mén)開(kāi)到位信號(hào)未被觸發(fā),所以集控人員觀察行程值是否正常,閘首液壓油位是否正常,現(xiàn)地人員查看上閘首臥倒門(mén)機(jī)房?jī)?nèi)是否正常,都確認(rèn)無(wú)誤后,重新發(fā)開(kāi)門(mén)令,閘首門(mén)開(kāi)到位后,再啟動(dòng)調(diào)整船廂水深。
3.2 減少閉鎖停機(jī)發(fā)生的方法
3.2.1減少開(kāi)船廂門(mén)過(guò)程受水位閉鎖的影響
對(duì)于開(kāi)船廂門(mén)閉鎖停機(jī),最初的方式是依據(jù)水位信息系統(tǒng),船廂對(duì)接時(shí)計(jì)算船廂位置與水位差值,當(dāng)水位變化較快時(shí),操作員須不斷觀察并計(jì)算,增加了工作量,也不便于監(jiān)護(hù)機(jī)構(gòu)的運(yùn)行狀態(tài),降低了工作效率。對(duì)此,通過(guò)優(yōu)化上位機(jī)界面顯示,新增船廂位置與水位差值的實(shí)時(shí)顯示,提高預(yù)判能力。如果在未開(kāi)啟船廂門(mén)之前,操作員已經(jīng)預(yù)判船廂水深會(huì)波動(dòng)變幅大,須立刻停止對(duì)接;船廂位置與航道水位偏差允許范圍內(nèi)時(shí),可以先開(kāi)啟船廂門(mén),再開(kāi)啟臥倒門(mén),減少因閉鎖條件的影響造成的船廂門(mén)反復(fù)啟停。
3.2.2降低對(duì)接鎖定信號(hào)丟失故障
對(duì)接鎖定信號(hào)丟失故障發(fā)生頻率較高,而且該故障也增加了礙航的風(fēng)險(xiǎn)。為減少該故障的發(fā)生,應(yīng)盡量減少船廂對(duì)接時(shí)間和船廂一直處于高水位(3.6 m以上)的情況。對(duì)此,通過(guò)優(yōu)化上行船舶靠墩等待的進(jìn)廂方式減少船廂對(duì)接時(shí)間。以往上行進(jìn)廂船舶遇到會(huì)船時(shí),會(huì)選擇靠離下游閘首較遠(yuǎn)的南側(cè)靠船墩進(jìn)行等待,試通航運(yùn)行中通過(guò)對(duì)船舶會(huì)船以及進(jìn)廂方式的觀察研究得知,離閘首門(mén)較近的北側(cè)靠船墩及其水域可以進(jìn)行會(huì)船,因此調(diào)整了船舶調(diào)度,允許上行進(jìn)廂匯船的船舶靠下游北側(cè)4#、5#、6#靠船墩,縮短了進(jìn)廂時(shí)間,特別是吃水較深的大尺度船舶,縮短了近25 min。
3.2.3降低調(diào)整船廂水深中斷故障
因?yàn)楹降浪怀B(tài)性的波動(dòng),同時(shí)因?yàn)榇斑M(jìn)出廂時(shí)對(duì)廂頭水體的擾動(dòng),導(dǎo)致閘首門(mén)產(chǎn)生向上的小幅度漂移[4],使作為調(diào)整水深的閉鎖條件的臥倒門(mén)開(kāi)到位信號(hào)丟失,調(diào)整船廂水深被中斷。因而盡量減少船廂與航道的對(duì)接時(shí)間,避免航道水位波動(dòng)的影響。以上關(guān)于上行船舶靠墩等待的進(jìn)廂方式的優(yōu)化,同樣適用于減少調(diào)整船廂水深流程中斷的發(fā)生。
3.3 閉鎖優(yōu)化
3.3.1優(yōu)化船舶進(jìn)出廂變燈令
增加廂頭和閘首的強(qiáng)制變燈令,當(dāng)船舶進(jìn)出廂、船廂水深不滿足閉鎖條件范圍時(shí),確認(rèn)船廂水深滿足船舶動(dòng)態(tài)吃水需求[5],保證船舶進(jìn)出廂行駛安全后,點(diǎn)擊旁路“上下廂頭(閘首)信號(hào)燈綠燈(變燈)”。增強(qiáng)對(duì)吃水較淺的船舶進(jìn)出廂指揮的靈活性和動(dòng)作的流暢性,縮短進(jìn)出廂時(shí)間。同時(shí),上位機(jī)界面增加水深數(shù)值的警示提示,當(dāng)船廂水深不滿足閉鎖范圍時(shí),數(shù)值由黑變紅,便于操作員及時(shí)發(fā)現(xiàn)和應(yīng)對(duì),提高操作效率。
3.3.2優(yōu)化安全站水位判斷方式
優(yōu)化各機(jī)構(gòu)因?yàn)榘踩舅徊粷M足的閉鎖限制,僅僅在機(jī)構(gòu)動(dòng)作前作為判斷條件,減少機(jī)構(gòu)在運(yùn)行時(shí)由于水位波動(dòng)造成的停機(jī),減輕設(shè)備結(jié)構(gòu)沖擊,降低停機(jī)故障率,提高設(shè)備的穩(wěn)定性。
3.3.3優(yōu)化閉鎖條件報(bào)警顯示
閉鎖條件設(shè)在一定范圍時(shí),參數(shù)對(duì)象可能會(huì)出現(xiàn)在臨界值范圍波動(dòng)的情況,機(jī)構(gòu)可能因?yàn)闂l件的波動(dòng)反復(fù)啟停,這樣會(huì)給各機(jī)構(gòu)運(yùn)行帶來(lái)很大沖擊,有損設(shè)備的使用壽命。目前,閉鎖條件不滿足時(shí)不能像故障報(bào)警一樣彈出反饋界面,出現(xiàn)動(dòng)作中斷或機(jī)構(gòu)反復(fù)啟停不能及時(shí)察覺(jué),影響運(yùn)行效率。因此,建議設(shè)置閉鎖故障反饋顯示,當(dāng)閉鎖不滿足時(shí),提醒操作員,提高運(yùn)行狀態(tài)的可視化和操作的人性化。
3.4 結(jié)果分析
優(yōu)化前后常見(jiàn)相同閉鎖停機(jī)次數(shù)故障對(duì)比見(jiàn)表6。
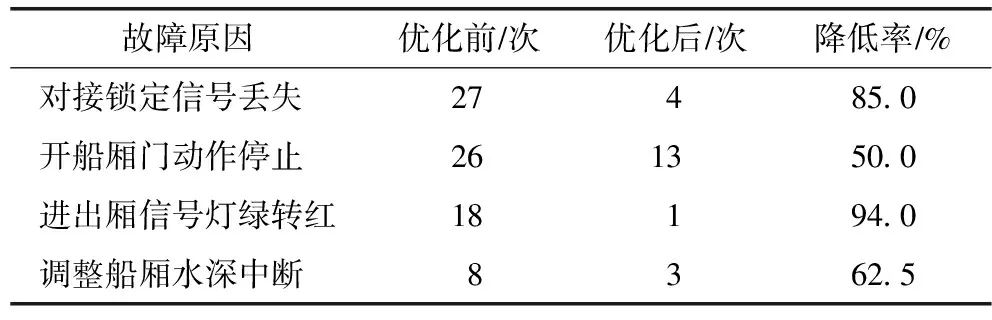
表6 優(yōu)化前后常見(jiàn)相同閉鎖停機(jī)次數(shù)故障對(duì)比
從表6可知,通過(guò)集控操作技巧、調(diào)度方式的改變以及停航改造期間的流程優(yōu)化,對(duì)接鎖定信號(hào)丟失、開(kāi)船廂門(mén)動(dòng)作停止、進(jìn)出廂信號(hào)燈綠轉(zhuǎn)紅及調(diào)整船廂水深中斷故障率均顯著降低,提高了流程穩(wěn)定性和通航效率。
4 結(jié)論
1)根據(jù)船廂水深、船舶吃水及航道水位狀態(tài)的相對(duì)關(guān)系,同時(shí)優(yōu)化集控界面的顯示,給集控操作員提供直觀的信息,便可按照當(dāng)前狀態(tài)選擇直接開(kāi)船廂門(mén)、先關(guān)門(mén)調(diào)水再開(kāi)門(mén)或者重新對(duì)接,應(yīng)對(duì)開(kāi)船廂門(mén)停止的閉鎖停機(jī)。
2)以工藝流程為中心,利用集控與檢修模式的優(yōu)勢(shì),采用2種模式相結(jié)合的方法,快速解除對(duì)接鎖定信號(hào)丟失的閉鎖停機(jī)故障。
3)優(yōu)化上位機(jī)界面顯示及調(diào)整上行船舶靠墩等待方式,縮短進(jìn)廂時(shí)間和對(duì)接時(shí)間,改善水位變動(dòng)對(duì)設(shè)備的影響,顯著減少對(duì)接鎖定信號(hào)丟失和調(diào)整水深中斷的閉鎖停機(jī)的發(fā)生幾率。
4)優(yōu)化開(kāi)船廂門(mén)閉鎖條件中水位判斷方式后,顯著減少了機(jī)構(gòu)因閉鎖條件影響反復(fù)啟停的次數(shù),減輕了對(duì)設(shè)備結(jié)構(gòu)的沖擊,有利于延長(zhǎng)設(shè)備使用壽命。
猜你喜歡
艦船科學(xué)技術(shù)(2022年14期)2022-09-22 03:07:40
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
船舶(2021年4期)2021-09-07 17:32:22
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
小哥白尼(趣味科學(xué))(2019年10期)2020-01-18 09:16:22
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
汽車維護(hù)與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
