基于安卓平臺的遠控S頻段信標機系統設計與實現
2020-02-27 12:59:26葉君好周立新趙志軍趙德艷
無線電工程 2020年3期
葉君好,周立新,蔣 勇,趙志軍,趙德艷
(中國人民解放軍63726部隊,寧夏 銀川750004)
0 引言
近年來,隨著我國國防科技水平的不斷發展,航天任務類型和數量呈較快增長趨勢,多類型飛行器性能、狀態出現較大變化,對航天測控系統提出了更高的要求[1-3]。為獲得飛行器全新飛行運動軌跡下關鍵段落更高精度的遙測、外測等數據,測控單位新列裝了多類型高精度測控設備,特別是大口徑S頻段設備[4-5]。
由于新設備口徑大、精度高,為有效地檢查和測試設備校相、校零和自跟蹤性能等功能,需要架設比原有測控設備更高更遠的信標機,同時需要對信標機的頻點、衰減和載波調制等參數進行頻繁切換,但目前信標機控制多采用有線連接或無線電臺控制的方式:有線連接只適用固定測控陣地且距離有限;無線電臺控制方式受無線電信號作用距離的制約,遠距離傳輸穩定性能有待提升。在執行機動測量任務時,信標機的架設更是費時、費力,同時還需專人往返于設備場坪和信標架設點,對信標機電池進行充電和安防狀態檢查,人員安全風險較大且不利于設備工作開展,因此需探索設計不間斷供電、遠距離可靠控制和信號輸出穩定的信標機系統。本文利用目前覆蓋范圍廣的民用電信4G無線網絡和基于成熟的安卓平臺的移動終端應用開發手段,開發了一套基于安卓系統的遠距離控制可靠的信標機系統,實現信標機一次架設、信號穩定和控制可靠,直至測量任務結束,有效提高了設備的工作效率。
1 系統設計方案
目前電信4G無線網絡已基本實現了全面覆蓋,基于安卓平臺的APP開發方法比較成熟。依托電信4G無線網絡,開發了基于安卓平臺的遠控APP,通過在手機上部署APP,實現了對自研S頻段信標機的遠距離、高可靠的實時控制。
系統共有2個部分:一個是控制端,是1部安卓手機(含電話卡);另一個是被控制端,包括安卓手機1部(含電話卡)、藍牙串口通信模塊1塊、USB轉串口通信模塊1塊、自研S頻段信標機1臺及太陽能發電系統1套。系統總體設計框圖如圖1所示。

圖1 系統總體設計框圖Fig.1 System overall design block diagram
控制端安卓手機利用APP,通過4G網絡向被控制端安卓手機APP發送查詢控制命令,被控制端安卓手機通過藍牙經過串口轉換實現對信標機的查詢控制,太陽能發電系統向被控制端安卓手機、藍牙轉串口模塊和信標機進行不間斷供電。
2 系統實現
系統主要實現了3方面內容:① 信標機硬件系統的研制,包括射頻開關控制、信號頻率控制、信號衰減控制和狀態實時采集等功能;② 手機端控制APP的開發,包括服務器管理模塊、網絡即時通信模塊、藍牙串口通信模塊和工作模式快速切換等功能;③ 供電系統的實現,包括太陽能板便捷接入、多口DC 12 V輸出和電源電量實時監控等功能,系統功能結構如圖2所示。
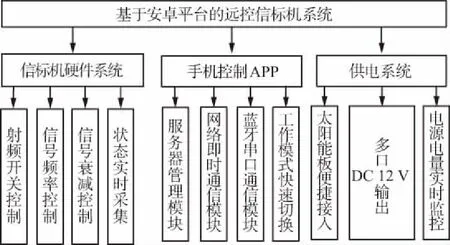
圖2 系統功能結構Fig.2 System functional structure
2.1 信標機硬件設計
信標機采用單環鎖相頻率合成技術,電路主要包括:集成鑒相器ADF4156、濾波器、壓控振蕩器VCO、匹配衰減電路、單片機電路、藍牙模塊和電源電路[6-8],原理框圖如圖3所示。
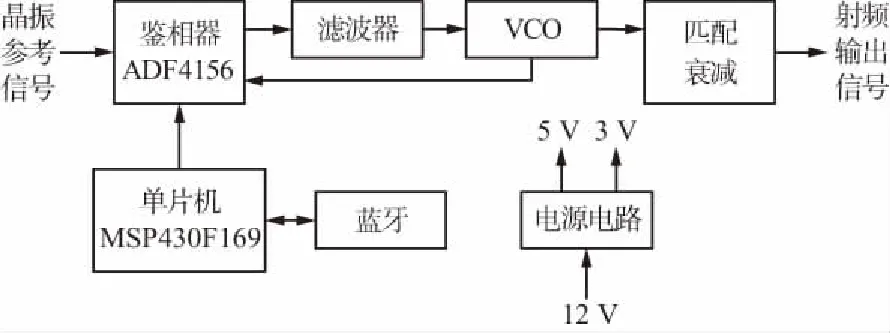
圖3 信標機原理框圖Fig.3 Block diagram of beacon principle
信標機加電后,單片機MSP430F169通過藍牙模塊接收遠端發來的控制信號[9-11],對鑒相器ADF4156初始化。晶振參考信號和VCO反饋的比較信號輸入至鑒相器ADF4156中,單片機控制ADF4156內的可編程參考分頻、分數分頻器進行分頻,2個信號分頻至鑒相頻率,再通過芯片內集成的相位頻率檢測器PFD進行鑒相,得到誤差電流后,經過內部的電荷泵后輸出。濾波器對此輸出的誤差信號進行濾波,得到與參考、比較信號的頻率和相位誤差相關的控制信號,此控制電壓控制微波VCO進行頻率和相位調整,直至頻率相同,僅存很小的穩態相位誤差,環路鎖定。鎖定后,單片機對鎖定狀態信息通過藍牙發送給遠端進行顯示。VCO另一路輸出信號經匹配后,輸出給信標天線。+12 V通過電源電路二次穩壓,變換成+5 V和+3 V電源,給各單元模塊供電。
2.2 手機控制安卓APP軟件實現
2.2.1 通信接口幀格式設計
通信總線:RS-232;通信方式:異步、全雙工和主從應答式;字符格式:1位起始位、8位數據位、無校驗位和1位停止位;傳輸速率:9 600 bps;幀格式:幀頭、數據區和幀尾。通信接口幀格式如表1所示。
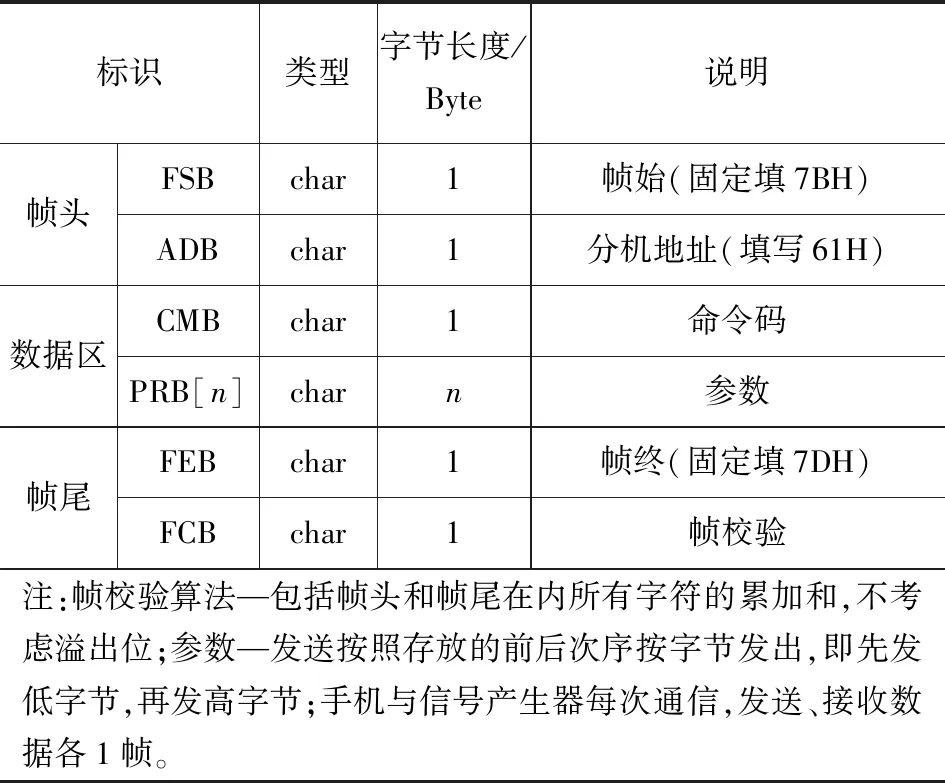
表1 通信接口幀格式Tab.1 Communication interface frame format
2.2.2 藍牙通信功能模塊實現
啟動藍牙查找其他設備流程如圖4所示。
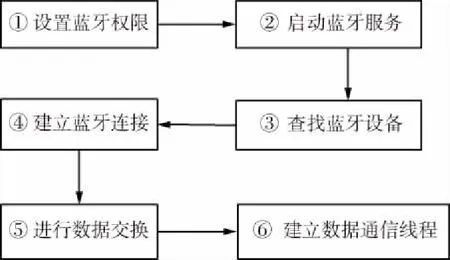
圖4 啟動藍牙查找其他設備流程Fig.4 Bluetooth find other device flow chart
從設置權限啟動藍牙查找其他設備開始需要6個基本步驟[12-13]:
步驟1:設置權限(在AndroidManifest.xml中聲明使用藍牙的權限);
步驟2:啟動藍牙(查看本機是否支持藍牙,然后獲取BluetoothAdapter藍牙適配器對象);
步驟3:發現藍牙設備(首先使本機處于可見狀態,便于其他設備發現本機藍牙,然后查找已經配對的設備,最后通過mBluetoothAdapter.startDiscovery()方法來搜索設備);
步驟4:建立連接(啟用一個服務器端的線程,死循環等待客戶端連接);
步驟5:交換數據(搜索到藍牙設備后,獲取設備地址,通過地址獲取一個BluetoothDeviced對象,通過對象device.creatRfcommSocketToServiceRecord(MY_UU_ID))與服務器連接獲取另一個socket對象;
步驟6:建立數據通信線程(讀取通信數據)。
2.2.3 網絡數據通信模塊實現
基于環信SDK實現網絡即時通信功能的快速集成[14-15]。具體步驟如下:
步驟1:下載環信SDK(V3.1.0)開發包;
步驟2:注冊成為環信開發者;
步驟3:在環信平臺上創建應用程序,獲取AppKey;
步驟4:創建AdroidStudio項目,導入開發包中的庫文件;
步驟5:添加權限;
步驟6:配置AppKey;
步驟7:聲明SDK所需的Service,BroadcastReceiver;
步驟8:SDK初始化。
下面是軟件關鍵代碼,軟件實現功能界面如圖5和圖6所示。
privatevoidinitConversation(){mConversation=EMClient.getInstance().chatManager().getConversation(mChatId,null,true);mConversation.markAllMessagesAsRead();
intcount=mConversation.getAllMessages().size();
if(count //獲取已經在列表中的最上邊的一條消息id StringmsgId=mConversation.getAllMessages().get(0).getMsgId(); mConversation.loadMoreMsgFromDB(msgId,20-count);} if(mConversation.getAllMessages().size()>0){EMMessagemessge=mConversation.getLastMessage(); EMTextMessageBodybody=(EMTextMessageBody)messge.getBody();} newThread(){ @Override publicvoidrun(){try{ ArrayList contactList=usernamelist;} catch(HyphenateExceptione) {e.printStackTrace();Log.d("zlx",e.getMessage().toString());}}}.start();} 圖5 軟件實現功能界面1Fig.5 Software interface 1 圖6 軟件實現功能界面2Fig.6 Software interface 2 供電系統如圖7所示,采用1塊18 V 30 W單晶太陽能板和1塊12 V 20 AH硅能蓄電池的組合,其中太陽能板采用鋼化玻璃層壓,防護等級為IP65,硅能蓄電池可在-40~70 ℃范圍內正常工作,滿足戶外使用要求。手機屏幕不亮時僅使用網絡和定位功能,功耗約為1.1 W,信標機功耗為1.4 W,在正常日照條件下,蓄電池能夠滿足電源不間斷地供應。 圖7 供電系統Fig.7 Power system 硬件電路與軟件設計完成后,進行了2次實際戶外場景測試,信標機距控制端(設備)直線距離約15 km(無遮擋),第一次持續了5天,第二次持續了10天,期間信標機信號輸出穩定、遠程控制可靠和電源供電無間斷,滿足設備校相、自跟蹤性能和校零等需求,達到了預期目的。信標機實物及輸出信號頻譜如圖8和圖9所示。 圖8 信標機實物Fig.8 Beacon 圖9 輸出信號頻譜Fig.9 Typical spectrum 本文針對大口徑測控設備校相、自跟蹤性能和校零等功能檢查需求,設計研發了基于安卓系統的遠控S頻段信標機系統,該信標機系統經過多次測試應用,各項指標均達到了預期,同時系統運行穩定可靠、幅度頻率調節可控且簡單實用。在戶外長時間使用證明了該信標機設計的高可靠性和便攜性,目前已成功地在大口徑測控設備上應用。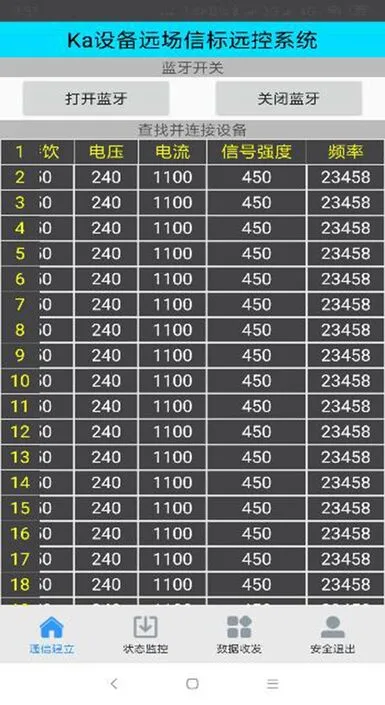

2.3 供電系統

3 實驗測試


4 結束語
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
中國特種設備安全(2022年6期)2022-09-20 02:52:28
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:26:08
電子制作(2018年11期)2018-08-04 03:25:42
中國科技論壇(2017年7期)2017-07-25 08:49:53
工業設計(2016年12期)2016-04-16 02:52:00
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
消費者報道(2014年7期)2014-07-31 11:23:57