一種翼身融合飛行器的失速特性研究
2020-03-02 11:43:18付軍泉史志偉周夢貝吳大衛潘立軍
航空學報 2020年1期
付軍泉,史志偉,*,周夢貝,吳大衛,潘立軍
1. 南京航空航天大學 航空學院,南京 210016 2. 中國商用飛機有限責任公司 上海飛機設計研究院,上海 201210
翼身融合(BWB)的概念最早可以追溯到20世紀90年代。1924年,英國Westland公司設計制造的Dreadnought研究機,是翼身融合概念在飛行器上的首次實踐。但是受限于早期制造工藝以及控制技術,BWB飛行器發展較慢[1]。隨著現代航空電子技術、控制技術的不斷進步,以及對飛機燃油效率、碳排放和氮氧化物排放要求的不斷提高,翼身融合飛行器因其高升阻比越來越受到關注[2-5]。真正現代意義上的BWB布局飛行器由NASA蘭利研究中心與McDonnell Douglas公司于20世紀90年代末重新提出[6]。翼身融合布局形式的高度集成性以及與傳統布局相比更大的浸濕面積,使其具有較好的氣動性能,并具備油耗低、排放少、噪聲低、內部空間大等優點[7-9]。但是新構型也為航空設計提出了新的問題,其中最主要的就是多學科設計優化問題。針對此問題,已有相當多的研究,如歐洲的MOB (Multidisciplinary Optimization of a Blended wing body)項目和VELA (Very Efficient Large Aircraft)項目,這些研究對BWB的結構、氣動等多方面進行了深入細致的優化設計,更多的體現在巡航性能的優化,但對于BWB飛行器失速特性的研究較少[10-13]。翼身融合布局形式與傳統布局形式相比機身較短,升降舵操縱力臂較短,這就造成其操縱效能降低,使BWB布局飛行器在失控飛行時面臨更加嚴峻的挑戰。所以對于BWB布局飛行器失速特性的研究十分重要[14]。波音公司在X-48B項目中,通過虛擬飛行試驗對BWB布局飛行器失速特性進行研究,并設計了試飛反尾旋傘[15-16]。Oliverio 采用數值計算的方法對BWB布局飛行器的低速失速特性進行研究,確定其在無增升構型下能維持低速穩定飛行[17]。但這些研究對于BWB布局飛行器失速過程的流場結構和流動機理鮮有涉及。而對于三角翼以及細長體三角翼流場特性的研究[18-21]指出升力是由增升裝置、機翼環量以及前緣分離造成的前緣渦共同產生,在大迎角下,升力主要來源可能是前緣渦升力[22]。所以對于BWB布局流場結構和流動現象的研究,能夠明確失速產生的原因,并為改善失速特性提供重要的參考。
本文針對某雙垂尾翼身融合飛行器構型,首先通過測力試驗,對該構型飛行器的失速迎角以及可能出現的失穩迎角進行分析。并通過不同構型下的縱向數據對比,研究不同構件對翼身融合飛行器氣動性能的影響。然后選定無增升構型,采用二維粒子圖像測速(PIV)技術,對其縱向不同截面進行流場結構的拍攝,通過對比不同迎角,不同縱向截面的流場變化情況,研究BWB布局飛行器失速過程,并對其失速特性進行分析。最后,通過表面油流試驗,分析不同迎角下的表面拓撲結構,并與PIV流場結果進行對比驗證。
1 試驗模型
試驗模型基于中國商飛的BWB試飛樣機,模型縮比為1∶4。試驗模型的幾何參數如表1所示,三視圖如圖1所示。模型采用雙垂尾設計,同時具備3種組合部件,包括翼梢小翼、前緣縫翼和飛機上表面的雙吊艙。翼梢小翼為融合式翼梢小翼,高度15 mm,展長35 mm,根弦長38 mm,外傾角30°;前緣縫翼布置在中外段機翼,縫道寬度0.8%,重疊量2.1%,定軸偏轉,偏度-5°;雙吊艙對稱于中心截面安裝,距中心截面120 mm,主體長35 mm,直徑為20 mm。
試驗模型具備5種構型,其中無翼梢小翼、前緣縫翼和雙吊艙的構型為無增升裝置構型,即干凈構型;只安裝翼梢小翼的構型為帶小翼構型;只安裝前緣縫翼的構型為帶前緣縫翼構型;只安裝雙吊艙的構型為帶吊艙構型;同時安裝翼梢小翼、前緣縫翼和雙吊艙的構型為完備構型。
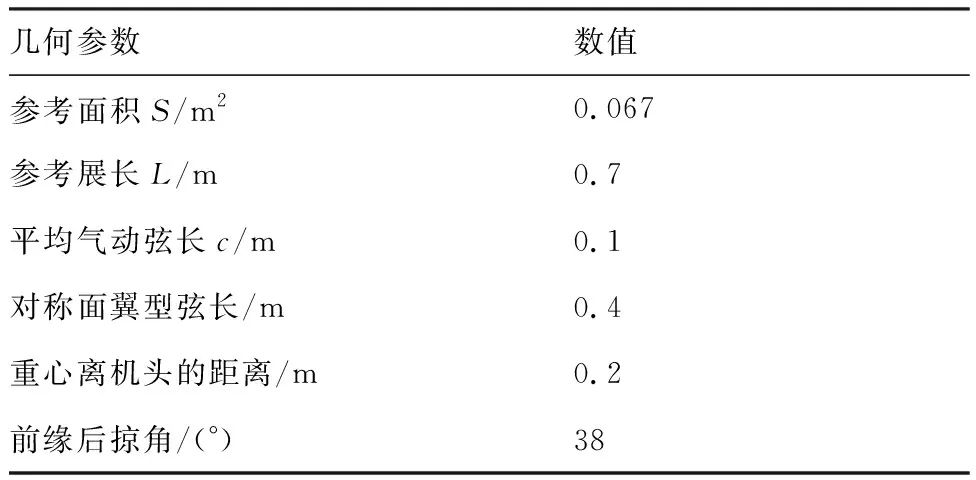
表1 試驗模型幾何參數Table 1 Geometric parameters of experimental model
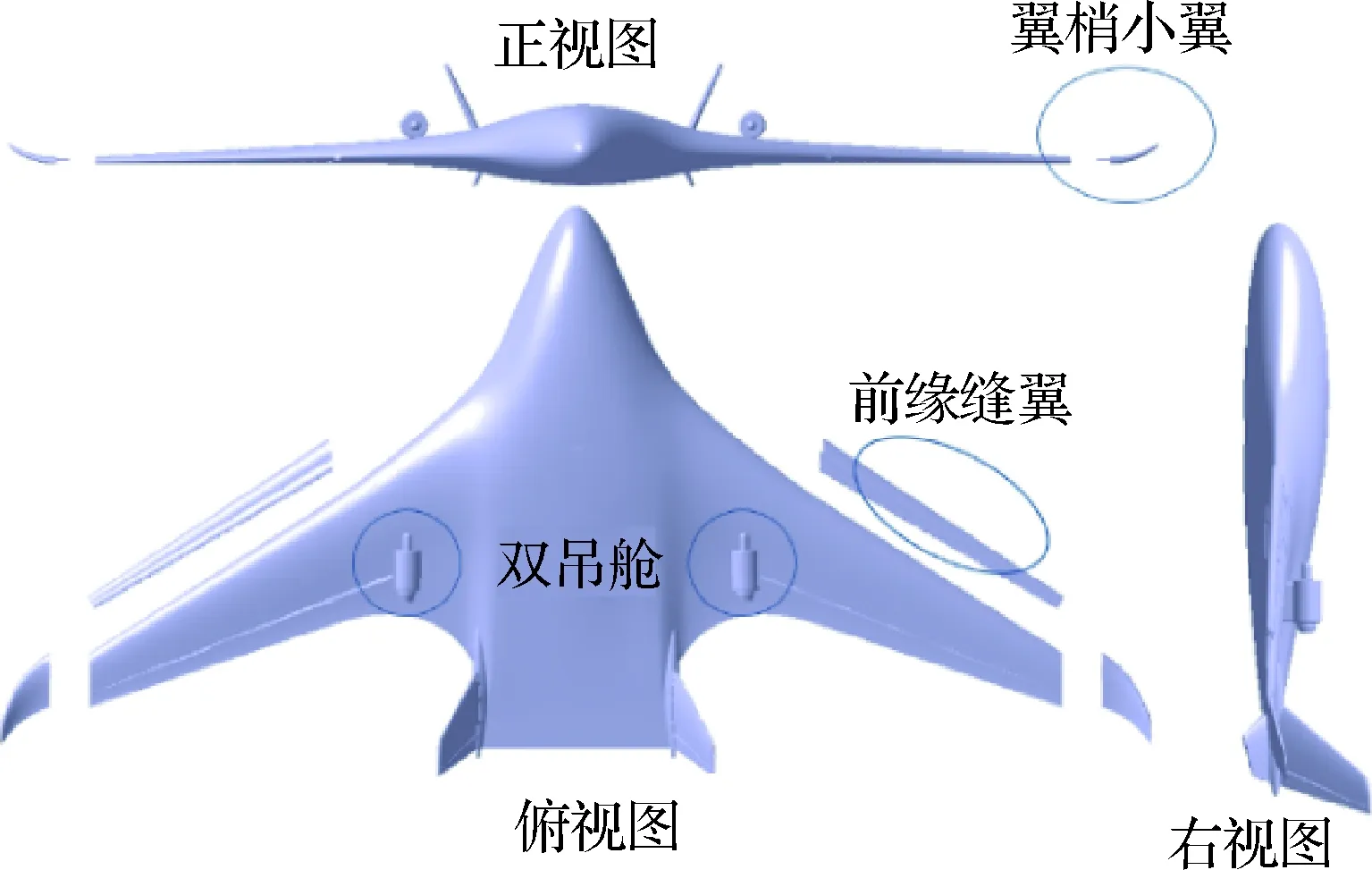
圖1 試驗模型三視圖Fig.1 Three views of experimental model
2 試驗設備與方法
試驗在南京航空航天大學1 m非定常低湍流度風洞中進行,這是一座低速回流開口風洞。開口試驗段截面為矩形截面,尺寸為1.5 m×1.0 m,試驗段長1.7 m,風洞自由來流的紊亂度為0.05%,最大風速為30 m/s,最小穩定風速為5 m/s。
對于測力試驗,采用?14六分量桿式天平測量氣動力和力矩,天平載荷和校準精度如表2所示。表中參數A、n、Y分別指軸向力、法向力和側向力,參數L、M、N分別指滾轉力矩、俯仰力矩和偏航力矩。試驗時模型采用腹撐方式,如圖2所示,試驗風速為10 m/s。模型相對于風洞試驗段很小,根據開口風洞的阻塞修正公式[23],阻塞修正系數ε為0.001 7,對于升力系數以及俯仰力矩系數的影響很小,洞壁干擾可以忽略不計。試驗保持側滑角為0°,舵面無偏轉,以迎角作為變化量,迎角變化范圍為-10°~60°,基本覆蓋翼身融合飛行器的飛行迎角范圍。分別對干凈構型、帶小翼、帶縫翼、帶吊艙和完備構型進行測力試驗。
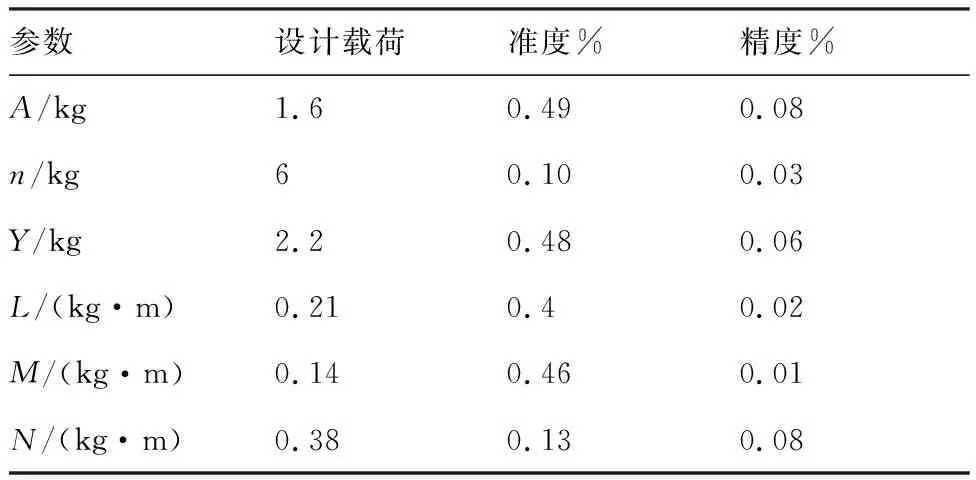
表2 桿式天平校準精度Table 2 Calibration accuracy of balance

圖2 試驗模型安裝示意圖Fig.2 Installation of experimental model
同時采用PIV系統對流場進行測量。系統中使用的是由BEAMTECH光電有限公司生產的VLITE 200 PIV激光器。試驗中使用的脈沖間隔為100 μs。圖像采集裝置、相關分析系統以及用于PIV測量系統的分析和處理軟件由Lavision GmbH生產。所得圖像通過跨幀交叉相關CCD(電荷耦合器件)DI傳輸到計算機。Gital相機分辨率為2 048 pixel×2 048 pixel,幀速率為14 frame/s。
試驗中選定干凈構型進行流場結構的測量。為研究其失速產生的原因以及失速發展的過程,分別對不同縱向截面進行拍攝,各拍攝截面在飛機上所處的位置如圖3所示,離中心截面的距離如表3所示。試驗中迎角從0°~46°變化。側滑角保持0°,舵面無偏轉,試驗風速為15 m/s。
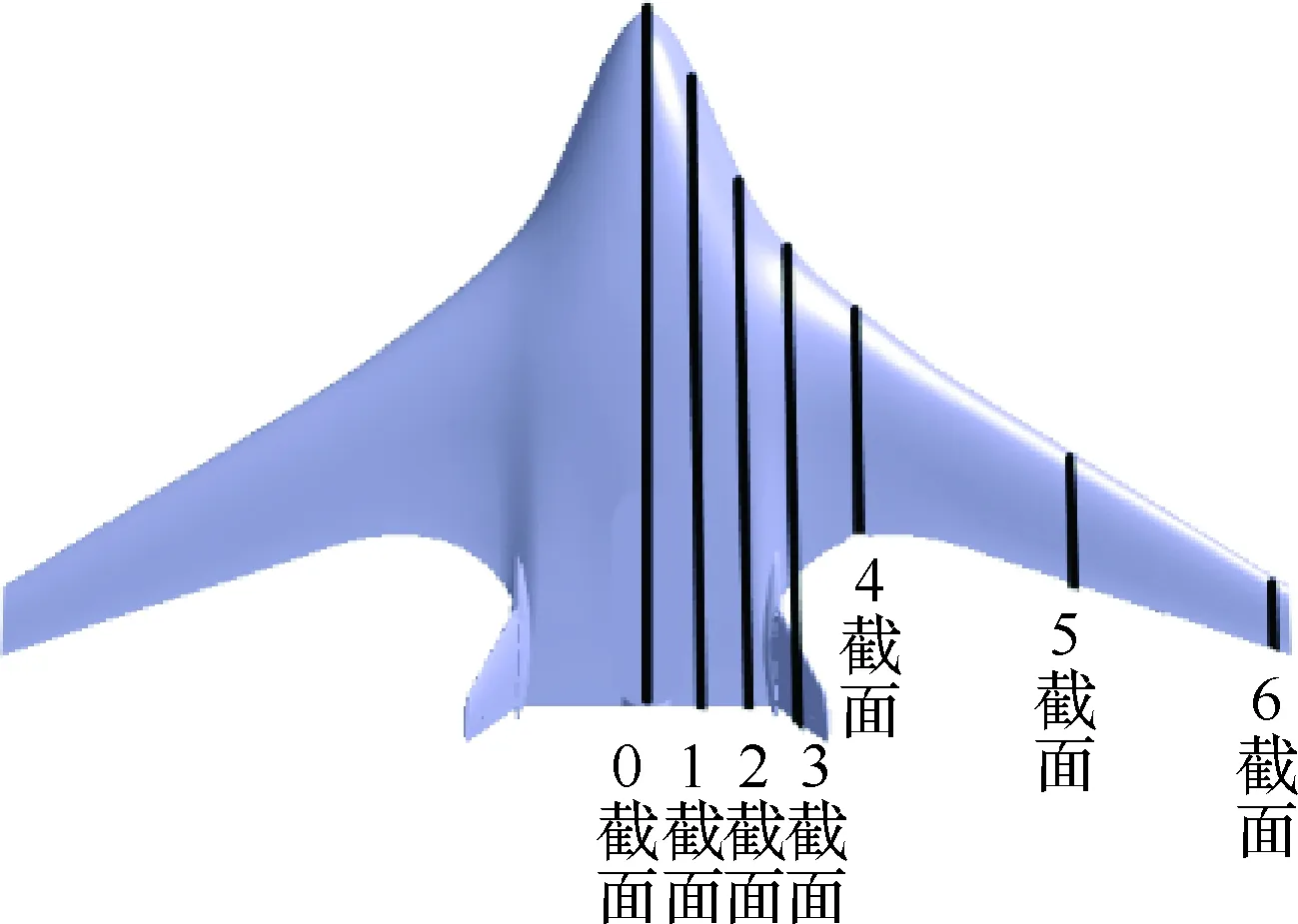
圖3 PIV拍攝截面Fig.3 PIV photo sections
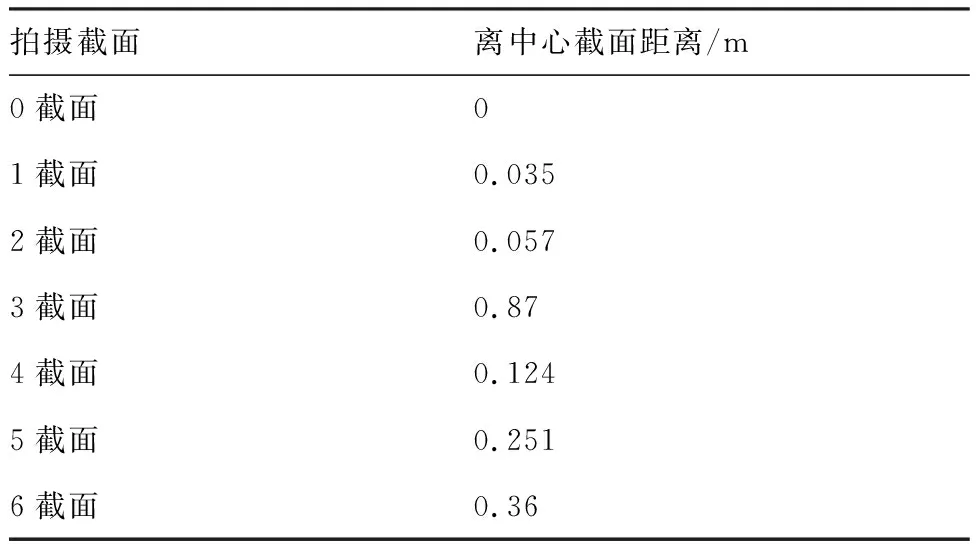
表3 PIV拍攝截面位置Table 3 PIV photo section positions
3 試驗結果與分析
3.1 氣動特性
現有研究表明,對于三角翼和細長三角翼,其前緣的流動分離及渦破碎現象對于飛機的氣動性能會有較大影響。而對縱向氣動特性的影響與飛機的失速特性相關[24-25]。
對于測力試驗,首先進行了7次重復性試驗,試驗曲線如圖4所示。然后根據國內風洞試驗數據精確度標準[26],給出升力系數CL在不同迎角α下的重復性精度,如表4所示,由表可知,升力系數重復性最大誤差為0.001 63,達到低速風洞測力試驗精度合格指標。
圖5給出干凈構型與其他構型下的升力系數對比曲線。由升力系數曲線可以看出,對于干凈構型,在迎角小于10°時,基本具有線性升力特性;當迎角大于10°,升力線斜率隨著迎角增大逐漸減小,直到迎角到達24°時,出現一個平臺區;當迎角到達28°之后升力重新增大,直到失速迎角34°,此時最大升力系數為1.388。
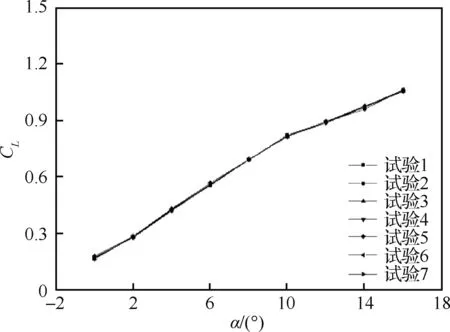
圖4 重復性試驗結果Fig.4 Repeated experimental results
而對于其他4種構型,在迎角小于10°時,升力系數變化與干凈構型一致,在迎角大于10°后,升力系數都有所增加。帶小翼構型的最大升力相比于干凈構型提升2.1%;帶縫翼構型和帶吊艙構型分別提升了6.1%和2.5%;完備構型的提升最大,達到10%,相當于前面3種構型的疊加效果。同時帶縫翼構型的失速迎角比起其他4種構型推遲了2°,為36°。所以縫翼對于BWB飛機增升效果明顯,同時具備推遲失速的作用。
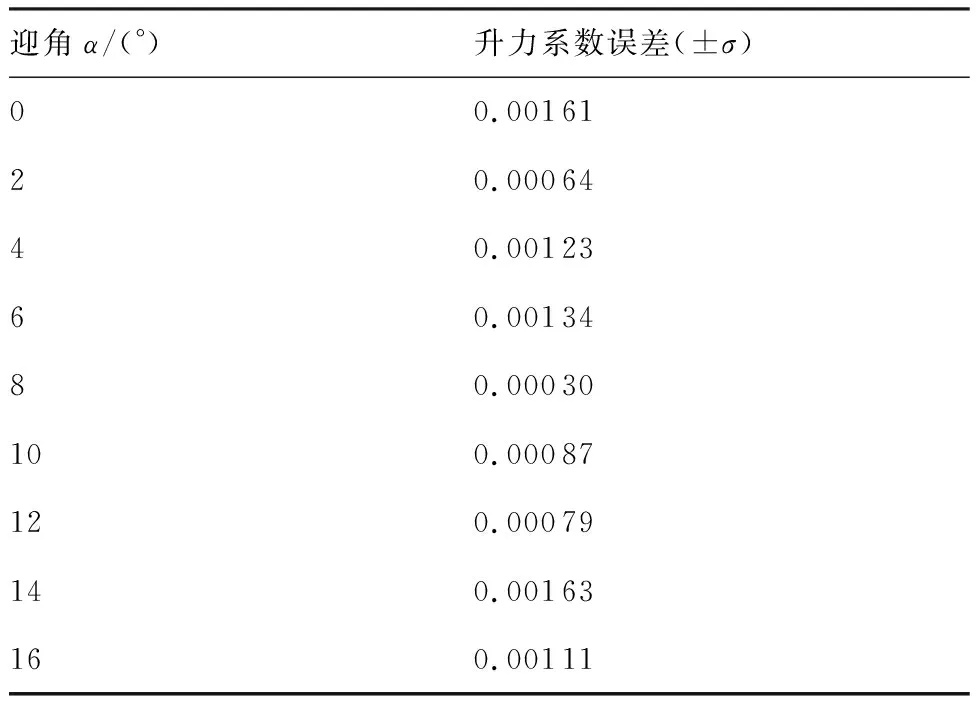
表4 不同迎角下7次重復性精度
圖6為干凈構型與其他構型俯仰力矩系數Cm對比曲線。可以看出,干凈構型下,當迎角在4°~10°時,俯仰力矩系數導數Cmα為正,飛行器具有抬頭趨勢,在此迎角區間縱向靜不穩定。在10°迎角之后,Cmα為負,飛行器縱向靜穩定。而在24°迎角之后,Cmα增大,但仍為負值,其縱向靜穩定性降低。
與其他4種構型的俯仰力矩系數曲線對比可以看出,小翼以及吊艙在小迎角下對于BWB飛行器的俯仰靜穩定性幾乎沒有影響,而在24°迎角后,可以有效減小全機的俯仰力矩系數,使飛機的低頭力矩增大,俯仰力矩系數平均降低分別為12%和15%。而前緣縫翼對于俯仰特性的影響正好相反,在小迎角范圍,前緣縫翼對于俯仰力矩系數具有明顯的降低作用,增大縱向穩定性,而在迎角超過24°之后,Cmα顯著增大,縱向靜穩定性降低。
圖5 升力系數曲線Fig.5 Lift coefficient curves
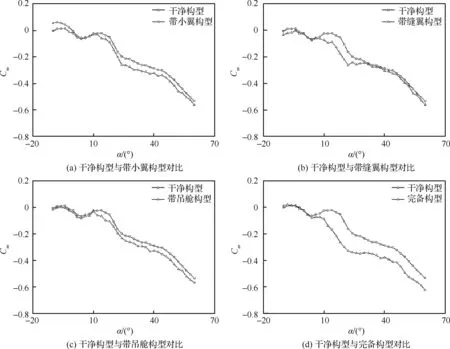
圖6 俯仰力矩系數曲線Fig.6 Pitch moment coefficient curves
綜合縱向升力系數以及俯仰力矩系數測力試驗數據可以看出,該構型BWB布局飛行器,在10°迎角以及24°迎角情況下出現明顯的縱向特性變化,在這兩個迎角下,升力系數降低而俯仰力矩系數導數增大,可能造成飛機的縱向失穩,甚至失速。同時與其他幾種構型的對比,發現翼梢小翼和雙吊艙對于BWB縱向氣動特性的影響都發生在迎角大于10°之后,而前緣縫翼對于縱向氣動特性的影響發生在4°迎角,且前緣縫翼在迎角不大于24°時,具有比翼梢小翼和雙吊艙更明顯的增升以及增加縱向穩定性的能力,且能夠推遲失速迎角,而在大迎角時,其對縱向穩定性幾乎沒有影響。
3.2 流動機理
通過對上述測力試驗結果的分析,發現在10°迎角和24°迎角處縱向氣動特性發生明顯的變化。該迎角區域的流場結構研究對于飛機的縱向穩定性以及失速的發展過程十分重要。以下的PIV測量結果將主要針對該迎角區域進行研究,分析在不同迎角下不同截面的流場結構,從而得出其失速特性的流動機理。
如圖7所示,在10°迎角下,6截面也就是翼稍的位置已經出現流動分離,而此時的5截面外翼中段仍是附著流,所以在10°迎角下,主要流動變化來自于翼梢附近,表現為流動分離。流動分離造成在此迎角下的升力系數降低,同時,因為機翼后掠翼梢置于重心之后,此處的流動分離將使俯仰力矩系數增大。這表明測力分析中10°迎角下的升力系數和俯仰力矩系數的變化與翼梢附近的流動分離有關。
當迎角為15°時,由圖8可以看出,此時5截面的流動已經完全分離,4截面流動分離點在翼型中部,3截面只有很小的分離區,而2截面仍是附著流,這說明隨著迎角的增大,機翼的流動分離開始向機翼內側發展。而當迎角為24°時,如圖9所示,3截面和4截面已經大面積分離,2截面流動分離相對來說較小,但分離點也已經在前緣位置。2截面位置已經位于飛機的中心體與外翼的連接處,可以看出在此迎角下,外翼段已經完全處于分離區。測力分析在此處升力系數出現一個平臺區,而俯仰力矩系數顯著增大,這與外翼整體處于分離區有關,此時的外翼段已經基本不提供升力。

圖7 10°迎角時不同截面的時均來流速度Fig.7 Time averaged streamwise velocity for different sections at α=10°
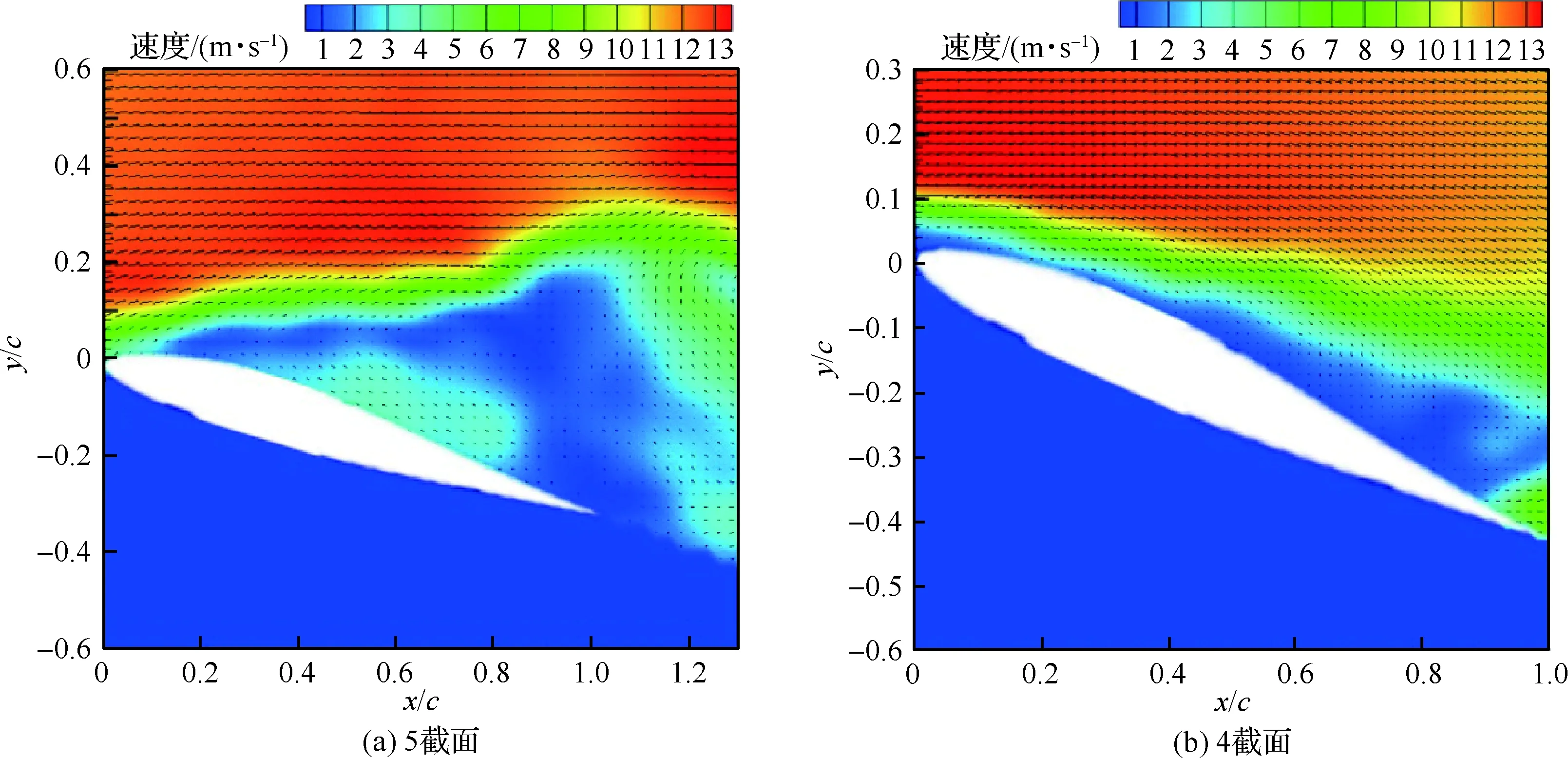
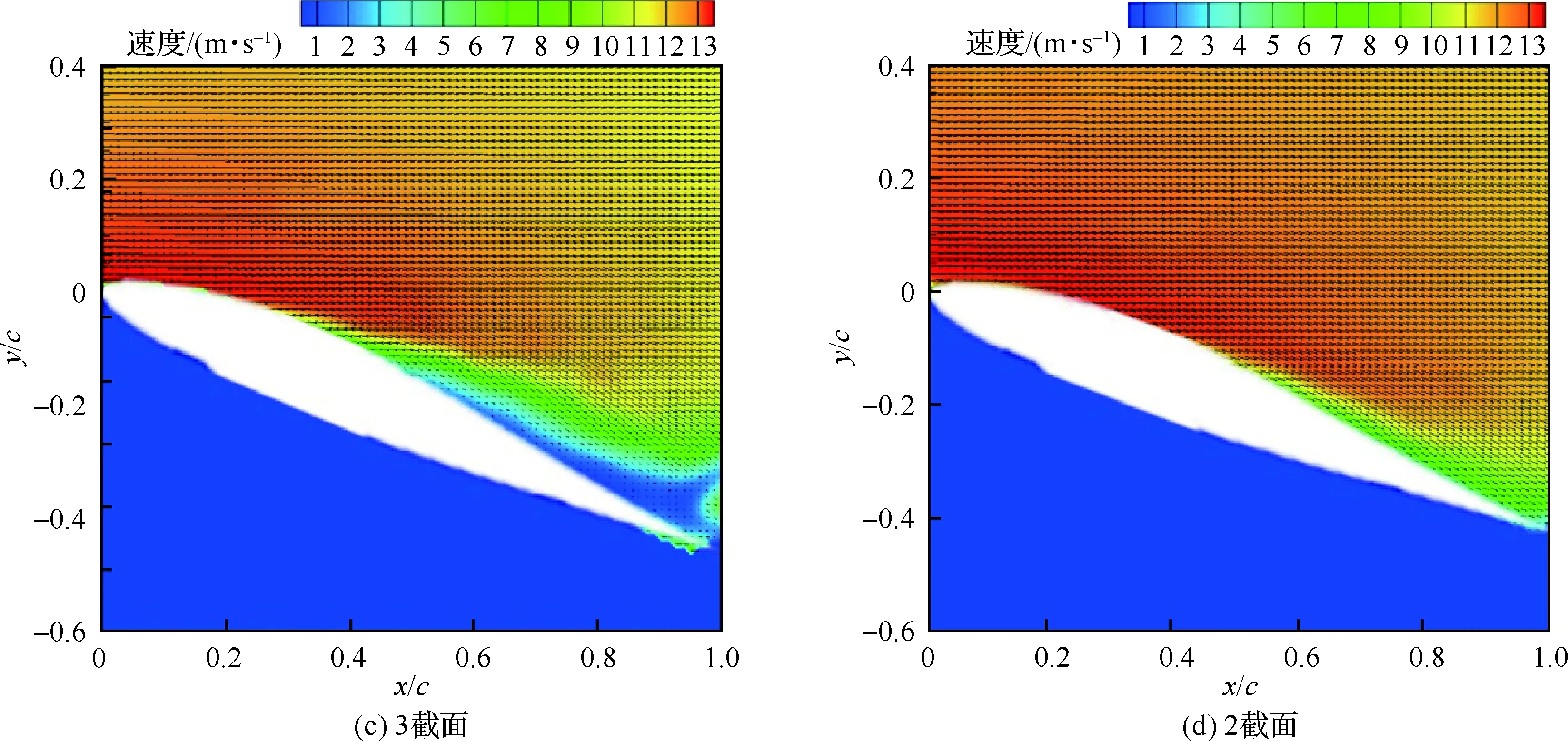
圖8 15°迎角時不同截面的時均來流速度Fig.8 Time averaged streamwise velocity for different sections at α=15°

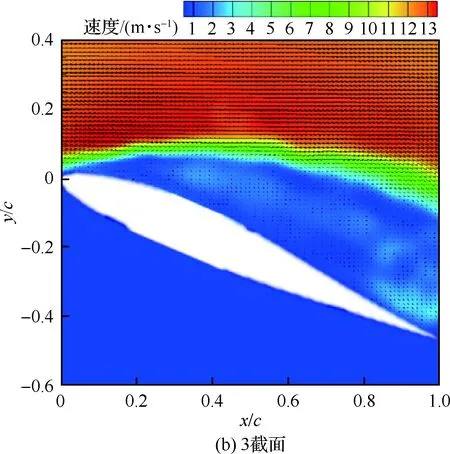
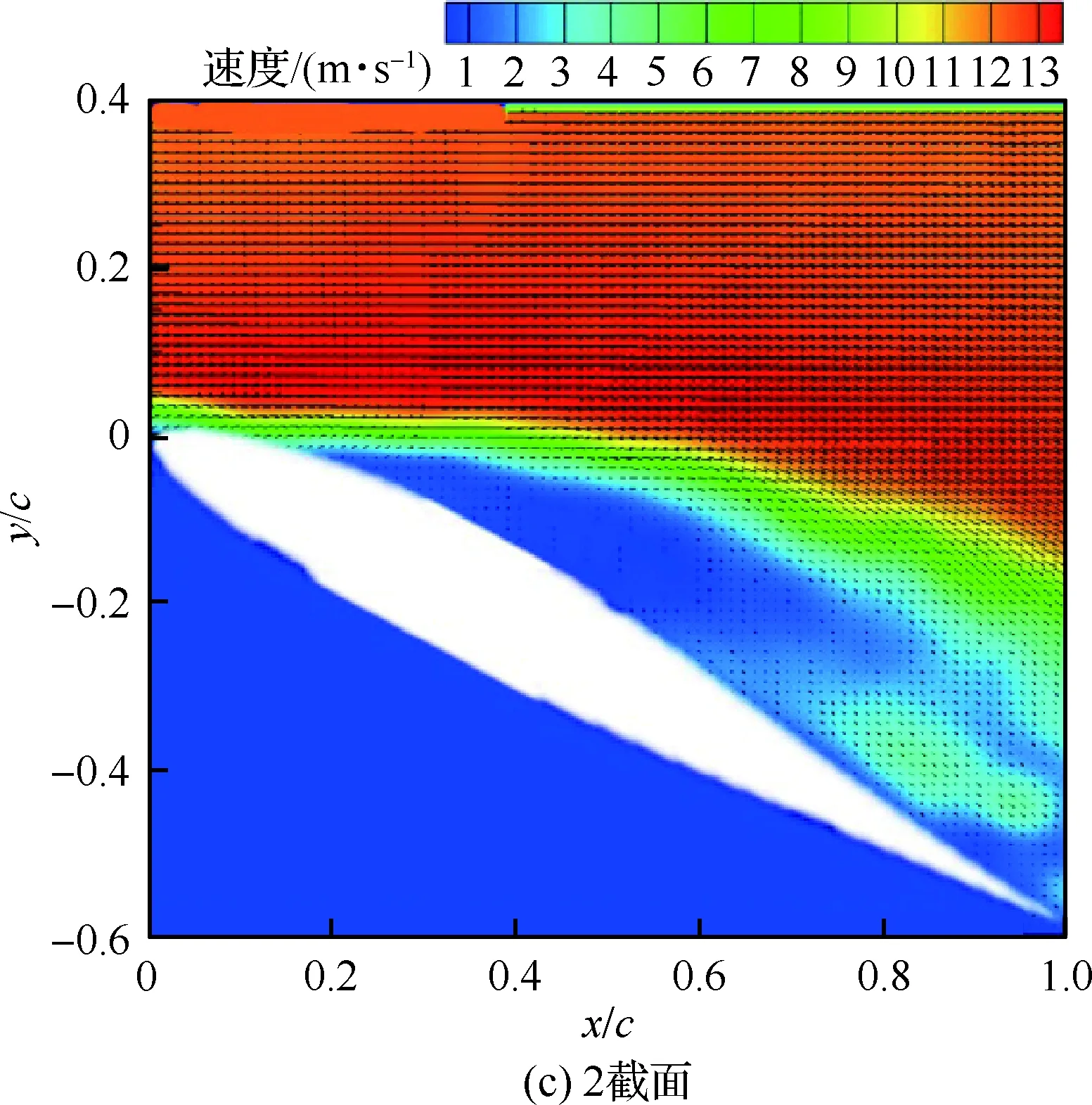
圖9 24°迎角時不同截面的時均來流速度Fig.9 Time averaged streamwise velocity for different sections at α=24°
通過升力系數曲線可以看出,該BWB布局飛行器的失速迎角為34°。從圖10可以看出,1截面在34°時仍是附著流動,直到42°才出現大面積的流動分離,所以雖然24°迎角后機翼已經不再提供升力,但中心體可以繼續提供升力,使飛機的失速迎角增大。
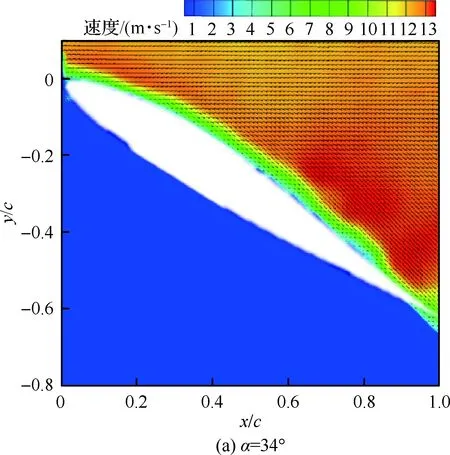

圖10 1截面不同迎角下的時均來流速度Fig.10 Time averaged streamwise velocity for 1 section at different angels of attack
油流試驗結果如圖11所示,分別是迎角0°、10°、15°和24°下的表面拓撲結構。0°迎角下,機翼前緣已經出現分離線,然后馬上又再附,在分離線和再附線之間,是穩定的層流分離泡。當迎角為10°時,分離線更靠近前緣,層流分離泡區域減小,機翼外端出現流動分離現象,最外端機翼后緣出現較大的回流區,同時具有對稱的旋渦結構,流動分離在這個區域比較明顯,這與PIV結果中10°迎角下6截面以及5截面的流動現象相對應,也是造成升力系數減小以及俯仰力矩系數增大的主要原因。15°迎角時,外翼段已經大面積分離,在翼根與機身連接處,出現對稱的旋渦結構。當迎角繼續增大到24°時,左右兩邊出現非對稱的旋渦結構,外翼段完全分離,而此時中心體部分仍具有較大的再附流動區,這與PIV測量結果相對應。
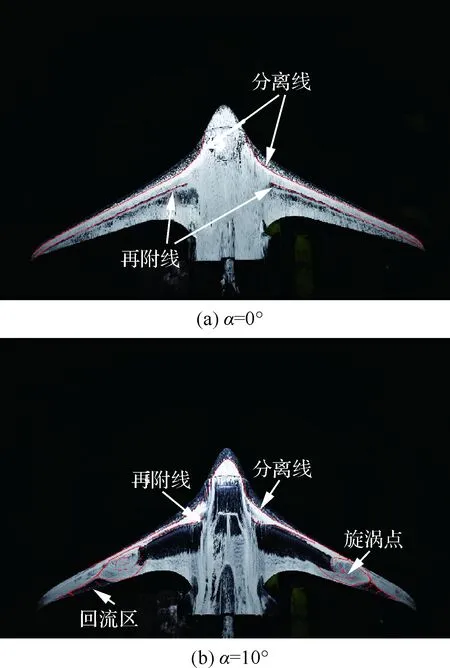
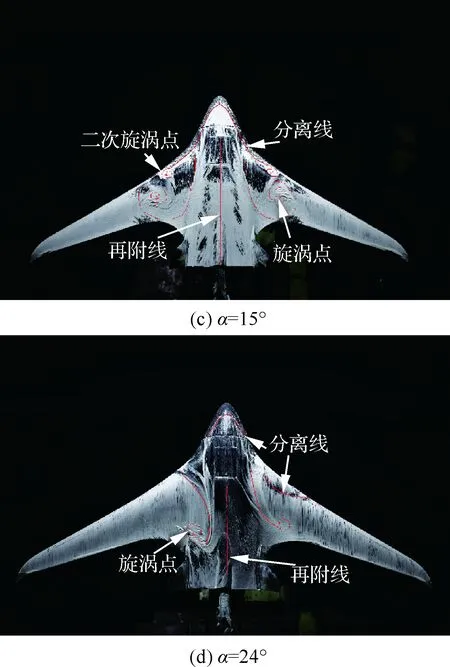
圖11 不同迎角下的表面油流顯示結果Fig.11 Surface oil flow visualization results at different angels of attack
通過PIV測量試驗與油流試驗分別從空間流場結構以及表面流場拓撲結構兩個方面對該BWB飛行器失速過程中的流動現象進行分析,結果具有很好的對應關系。隨著迎角的增大,飛機表面流場出現分離,分離區域從翼梢開始逐漸向翼根以及機身發展,而當外翼段完全失速時,飛機并不會馬上失速,中心體將繼續提供足夠大的升力維持飛行,真正的失速發生在中心體開始出現分離的時候。
4 結 論
針對某雙垂尾布局BWB飛行器的失速特性,采用測力試驗,對其縱向氣動特性進行分析,并研究了小翼、前緣縫翼、雙吊艙對其縱向穩定性的影響。同時采用PIV測量技術對其失速過程的流動機理進行分析。
1) 該構型BWB布局飛行器,在10°迎角以及24°迎角情況下會出現明顯的縱向特性變化,在這兩個迎角下,升力系數降低而俯仰力矩系數導數增大,可能造成飛機的縱向失穩,甚至失速。而這與機翼表面的流動分離,以及流動分離的發展過程有關。機翼表面的流動分離從翼梢開始,在10°迎角翼梢已經很大程度分離,隨著迎角增大,最終在24°時,整個外翼段處于分離區,機翼不再提供升力。
2) 中心體也能提供升力,并且在外翼完全失速后還能繼續提供升力,直到34°失速迎角,中心體出現流動分離,提供升力減小,升力系數開始降低。
3) 翼梢小翼和雙吊艙對于BWB縱向氣動特性的影響都發生在迎角大于10°之后,而前緣縫翼對于縱向氣動特性的影響發生在4°迎角,且前緣縫翼在迎角不大于24°時,具有比翼梢小翼和雙吊艙更明顯的增升以及增加縱向穩定性的能力,且能夠推遲失速迎角,而在迎角大于24°后,其對縱向穩定性幾乎沒有影響。說明前緣縫翼在機翼未完全失速的情況下具有很好的增升效果。這也為以后的流動控制提供了參考。在迎角較小時,流動控制布置于未失速的機翼前緣具有較好的效果,而當迎角較大,機翼已經完全處于分離區時,可以將流動控制布置于中心體上,通過抑制中心體的流動分離,達到更大的失速迎角。
