基于單片機(jī)的管道機(jī)器人控制系統(tǒng)的設(shè)計(jì)
2020-03-02 01:14:16朱思騰楊洋荊璽霖錢寧波吳東升
科技創(chuàng)新導(dǎo)報(bào) 2020年21期
朱思騰 楊洋 荊璽霖 錢寧波 吳東升


摘? 要:設(shè)計(jì)制造一臺(tái)管道自動(dòng)檢測(cè)與修復(fù)機(jī)器人。采用STM32單片機(jī)作為機(jī)器人的主控。設(shè)計(jì)基于角度外環(huán)和轉(zhuǎn)速內(nèi)環(huán)的雙環(huán)PID控制器,通過PWM控制技術(shù)調(diào)速,構(gòu)成兩軸云臺(tái)的直流電機(jī)閉環(huán)控制系統(tǒng)。基于OPENMV攝像頭的邊緣檢測(cè)技術(shù),識(shí)別管道內(nèi)壁腐蝕區(qū)域的特征輪廓。通過兩軸云臺(tái)轉(zhuǎn)動(dòng),自動(dòng)瞄準(zhǔn)管道內(nèi)壁的腐蝕區(qū)域,噴灑涂料修復(fù)該區(qū)域。機(jī)器人利用WIFI無線傳輸技術(shù)將管道內(nèi)部的圖像傳輸?shù)缴衔粰C(jī),基于2.4G無線通信技術(shù),實(shí)現(xiàn)采用遙控器進(jìn)行遠(yuǎn)程操作。經(jīng)過多次測(cè)試,樣機(jī)的實(shí)驗(yàn)結(jié)果表明:機(jī)器人具有良好的穩(wěn)定性和可控性,并能夠?qū)艿肋M(jìn)行自動(dòng)檢測(cè)和修復(fù)。
關(guān)鍵詞:管道檢測(cè)與修復(fù)機(jī)器人? 兩軸云臺(tái)控制系統(tǒng)? STM32單片機(jī)? PID控制
中圖分類號(hào):TP242.6 ? ? ? ? ? 文獻(xiàn)標(biāo)識(shí)碼:A 文章編號(hào):1674-098X(2020)07(c)-0001-03
Abstract: A pipeline robot was designed for detection and repair. The STM32 single chip processor was used as the main controller. The double loop PID controller was designed based on the outer angle-loop and the inner speed-loop, and the speed is adjusted by the PWM controller to form the DC motor closed-loop control system of the two-axis platform. The OPENMV camera, with the edge detection technology, was used to identify the corrosion characteristic on the inner wall of the pipeline. The corrosion areas of the inner wall of the pipeline were automatically scanned by rotating the two-axis platform, and then were repaired by spraying paint. The images on the pipeline were transmitted to the upper computer by the robot with the WiFi wireless transmission technology. The remote control was operated for remote operation by the 2.4G wireless communication technology. The experimental results of the prototype show that the robot has good stability and controllability, and can automatically detect and repair the pipeline.
Key Words: Pipeline robot for detection and repair;Controlling system with the two-axis platform;STM32 single chip processor;PID controller
管道運(yùn)輸是用管道作為傳輸工具的一種長(zhǎng)距離輸送液體和氣體物資的運(yùn)輸方式,是五大運(yùn)輸方式之一。隨著國(guó)內(nèi)經(jīng)濟(jì)的快速發(fā)展,到2017年初,長(zhǎng)輸油氣管道總里程已經(jīng)達(dá)到11.7×104km[1]。2017年,國(guó)家發(fā)展改革委、國(guó)家能源局發(fā)布《中長(zhǎng)期油氣管網(wǎng)規(guī)劃》,國(guó)內(nèi)又迎來新一輪管道建設(shè)高峰,油氣管的規(guī)模不斷擴(kuò)大[2]。但管道在使用過程中,由于管壁的腐蝕、人為損壞和自然災(zāi)害等原因,容易造成泄露事故,不僅給國(guó)民經(jīng)濟(jì)帶來重要損失,更會(huì)帶來巨大的社會(huì)危害。因此管道檢測(cè)和修復(fù)是關(guān)系到管道的可靠性以及提高其使用壽命的重要因素。
傳統(tǒng)的管道檢測(cè)使用全面挖掘法和隨機(jī)抽樣法,這兩種方法工作量大、效率低。另外,由于傳輸管道的特殊環(huán)境,絕大部分管道的內(nèi)壁很難檢測(cè)和修復(fù),因此有必要設(shè)計(jì)和制造一種管道檢測(cè)與修復(fù)的機(jī)器人,憑借其良好的性能代替工人到管道內(nèi)部進(jìn)行作業(yè),既能高效完成檢測(cè)和修復(fù)的任務(wù),又能避免人員受到傷害。
1? 機(jī)器人控制系統(tǒng)
管道機(jī)器人具有自動(dòng)檢測(cè)模式和手動(dòng)操作模式,自動(dòng)檢測(cè)模式具有高效、無人的優(yōu)點(diǎn)。但考慮到機(jī)器人需要一定的容錯(cuò)率,增加了手動(dòng)操作模式,使機(jī)器人更具有實(shí)用性。
自動(dòng)檢測(cè)模式是基于定位技術(shù)的控制算法,實(shí)現(xiàn)機(jī)器人在管道內(nèi)部的自主移動(dòng),通過激光測(cè)距模塊檢測(cè)機(jī)器人與管壁兩側(cè)的距離,解算出管內(nèi)行走的最優(yōu)路線,通過底盤MPU6050模塊檢測(cè)機(jī)器人底盤在x-y平面偏移的角度,控制機(jī)器人在管內(nèi)的直行和轉(zhuǎn)向,實(shí)現(xiàn)機(jī)器人自動(dòng)行走。通過設(shè)計(jì)一個(gè)兩軸云臺(tái),使其與機(jī)器人底盤連接,用于放置噴涂裝置和攝像頭。然后通過云臺(tái)MPU6050模塊實(shí)時(shí)檢測(cè)兩軸云臺(tái)在PITCH軸、YAW軸運(yùn)動(dòng)的角度和角速度,實(shí)現(xiàn)對(duì)云臺(tái)電機(jī)的穩(wěn)定控制。基于OPENMV攝像頭的邊緣檢測(cè)技術(shù),識(shí)別管道內(nèi)壁腐蝕區(qū)域特征輪廓,通過兩軸云臺(tái)的轉(zhuǎn)動(dòng)自動(dòng)瞄準(zhǔn)管道內(nèi)壁腐蝕區(qū)域,噴灑涂料,實(shí)現(xiàn)機(jī)器人的自動(dòng)檢測(cè)與修復(fù)功能。
手動(dòng)操作模式基于2.4G無線通信技術(shù),實(shí)現(xiàn)遙控器對(duì)機(jī)器人的遠(yuǎn)程自由操控。同時(shí)基于WIFI通信技術(shù)實(shí)時(shí)將管道內(nèi)部圖像傳輸?shù)缴衔粰C(jī),實(shí)現(xiàn)基于物聯(lián)網(wǎng)技術(shù)的人機(jī)交互。
1.1 硬件連接系統(tǒng)結(jié)構(gòu)
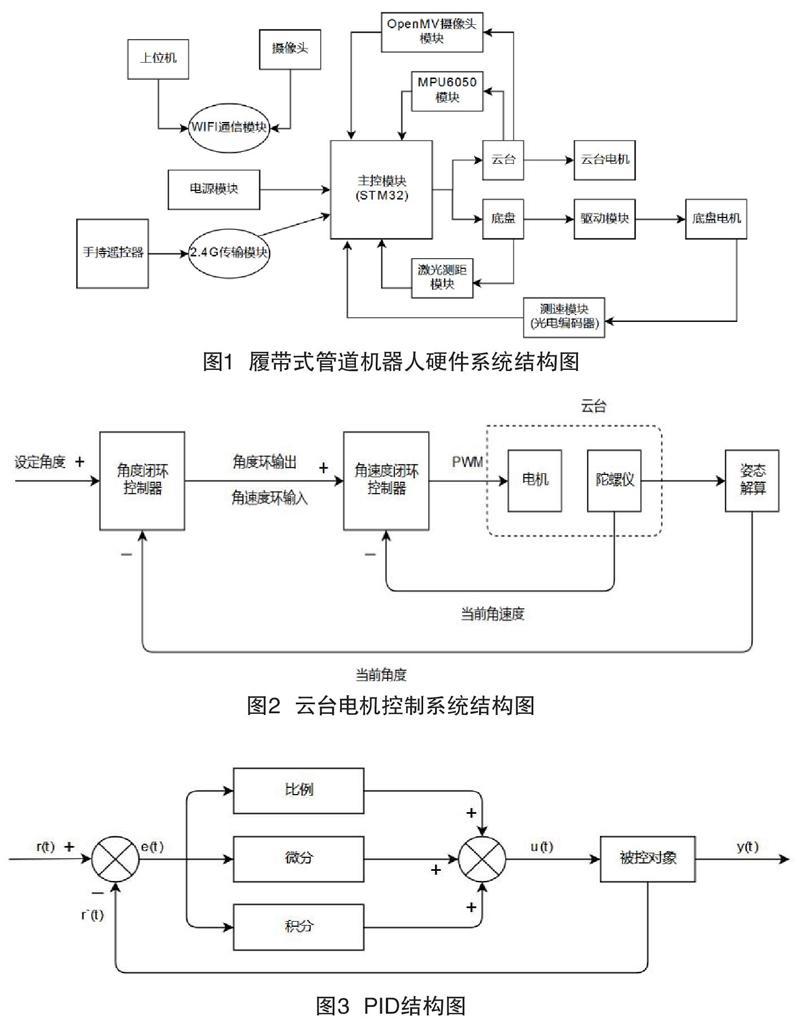
管道機(jī)器人控制系統(tǒng)結(jié)構(gòu)如圖1所示。控制系統(tǒng)以主控模塊為核心,進(jìn)行輸入和輸出操作。主控模塊接受遙控器發(fā)送的數(shù)據(jù),基于WIFI和2.4G無線傳輸技術(shù),采用上位機(jī)和遙控器聯(lián)合控制的方式,實(shí)現(xiàn)對(duì)管道機(jī)器人的遠(yuǎn)程遙控。主控模塊分別控制機(jī)器人的底盤和云臺(tái)。對(duì)于底盤,激光測(cè)距模塊實(shí)時(shí)檢測(cè)機(jī)器人底盤左右兩側(cè)與管道內(nèi)壁的距離,反饋數(shù)據(jù)給主控模塊,主控模塊基于定位模塊的控制算法,解算出機(jī)器人在管道內(nèi)部的最優(yōu)路徑,通過對(duì)電機(jī)的閉環(huán)控制,實(shí)現(xiàn)機(jī)器人在管道內(nèi)的自動(dòng)行走;對(duì)于云臺(tái),MPU6050模塊實(shí)時(shí)檢測(cè)云臺(tái)在空間上的轉(zhuǎn)動(dòng),并反饋數(shù)據(jù)給主控模塊,主控模塊基于PID控制算法,實(shí)現(xiàn)閉環(huán)控制云臺(tái)電機(jī)的轉(zhuǎn)動(dòng)。OPENMV模塊實(shí)時(shí)檢測(cè)管道內(nèi)壁,并計(jì)算腐蝕區(qū)域坐標(biāo),反饋數(shù)據(jù)給主控模塊,通過控制云臺(tái)的轉(zhuǎn)動(dòng),自動(dòng)瞄準(zhǔn)腐蝕區(qū),控制噴涂裝置噴灑顏料,實(shí)現(xiàn)機(jī)器人對(duì)管道內(nèi)壁的自動(dòng)檢測(cè)和修復(fù)。
1.2 控制程序設(shè)計(jì)方案
采用C語言編程,KEIL5作為編譯器,將C語言轉(zhuǎn)化成芯片可接受的二進(jìn)制碼。通過JILINK仿真器,下載到芯片程序存儲(chǔ)器,實(shí)現(xiàn)機(jī)器人的可編程控制。機(jī)器人控制程序,采用定時(shí)器計(jì)時(shí)的方式,以1ms為周期循環(huán)執(zhí)行控制邏輯,運(yùn)用PWM控制技術(shù)對(duì)電機(jī)速度進(jìn)行控制,設(shè)置定時(shí)器的編碼器模式對(duì)光電編碼器發(fā)送的脈沖進(jìn)行計(jì)數(shù),開通了多組DMA中斷,利用DMA通道采集數(shù)據(jù),運(yùn)用多組PID控制器,實(shí)現(xiàn)閉環(huán)控制。
2? 云臺(tái)電機(jī)控制系統(tǒng)
伺服控制系統(tǒng)方式可分為開環(huán)、半閉環(huán)和全閉環(huán),閉環(huán)控制系統(tǒng)更具穩(wěn)定性和快速響應(yīng)性,相比于單閉環(huán)控制系統(tǒng),雙閉環(huán)控制系統(tǒng)具有更好的抗擾動(dòng)性。由于云臺(tái)需要極高的穩(wěn)定性,電機(jī)啟動(dòng)的超調(diào)量小[3],為了保證系統(tǒng)的穩(wěn)、準(zhǔn)、快,直流調(diào)速系統(tǒng)普遍采用雙閉環(huán)控制方式[4],其結(jié)構(gòu)如圖2所示。
控制器采用角度外環(huán)、加速度內(nèi)環(huán)的雙閉環(huán)PID控制器。對(duì)于角度閉環(huán)控制器,輸入值為設(shè)定角度,對(duì)陀螺儀進(jìn)行姿態(tài)解算后得到的角度值作為真實(shí)值,輸出值傳遞給角速度環(huán)。對(duì)于角速度閉環(huán)控制器,輸入值為角度環(huán)的輸出,真實(shí)值為陀螺儀反饋的數(shù)據(jù),輸出值通過PWM控制技術(shù),實(shí)現(xiàn)對(duì)電機(jī)進(jìn)行控制。基于雙閉環(huán)PID串級(jí)控制,設(shè)計(jì)云臺(tái)電機(jī)控制系統(tǒng),云臺(tái)作為噴涂裝置和攝像頭模塊的載體,云臺(tái)系統(tǒng)的穩(wěn)定性實(shí)現(xiàn)了機(jī)器人在自動(dòng)檢測(cè)和修復(fù)過程中的穩(wěn)定運(yùn)動(dòng)。
3? 經(jīng)典PID控制器
3.1 原理介紹
比例積分微分控制,簡(jiǎn)稱PID控制,是最早發(fā)展起來的控制策略之一,其算法簡(jiǎn)單、可靠性高,PID控制系統(tǒng)原理圖如圖3所示。根據(jù)給定值和實(shí)際輸出值構(gòu)成控制偏差,將偏差按比例、積分和微分通過線性組合構(gòu)成控制量,對(duì)被控對(duì)象進(jìn)行控制。
圖3中,r(t):PID控制器設(shè)定值如下。
r'(t):系統(tǒng)的實(shí)際值;
e(t):設(shè)定值與實(shí)際值構(gòu)成控制偏差值(e(t)=r(t)-y(t))
u(t):PID控制器輸出值
y(t):系統(tǒng)的實(shí)際輸出值
軟件模擬PID控制器的控制規(guī)律為:
式中,KP:控制器的比例系數(shù);Ti:控制器的積分時(shí)間;Td:控制器的微分時(shí)間;P-比例環(huán)節(jié),比例環(huán)節(jié)是對(duì)偏差瞬間做出反應(yīng),使控制量向減少偏差的方向變化;I-積分環(huán)節(jié),積分環(huán)節(jié)是對(duì)偏差進(jìn)行累計(jì)計(jì)算,消除系統(tǒng)的偏差;D-微分環(huán)節(jié),微分環(huán)節(jié)是根據(jù)偏差的變化趨勢(shì)預(yù)先給出適當(dāng)?shù)募m正,阻止偏差變化。
PID控制算法可以分為位置式PID和增量式PID控制算法[5]。位置式PID控制算法的輸出與整個(gè)過去的狀態(tài)有關(guān),用到了誤差的累加值,而增量式PID的輸出只與當(dāng)前值和前兩次值的誤差有關(guān),考慮到執(zhí)行機(jī)構(gòu)不帶積分部件,所以選用位置式PID控制算法。由于是運(yùn)用在單片機(jī)上,需要將公式進(jìn)行離散化處理。位置式PID控制算法經(jīng)離散化處理后的公式為:
3.2 PID參數(shù)調(diào)節(jié)
應(yīng)用PID控制最重要的步驟就是進(jìn)行PID參數(shù)的選取和調(diào)整,通過對(duì)PID控制器參數(shù)的整定,使得系統(tǒng)滿足一定的標(biāo)稱性能和期望的輸出狀態(tài)[6]。
對(duì)于比例環(huán)節(jié)。控制作用的強(qiáng)弱取決于比例系數(shù)KP。比例系數(shù)KP越大,控制作用越強(qiáng),則過渡過程越快,控制過程的靜態(tài)偏差也就越小;但是KP越大,也越容易產(chǎn)生振蕩,破壞系統(tǒng)的穩(wěn)定性。
積分環(huán)節(jié)的調(diào)節(jié)作用雖然會(huì)消除靜態(tài)誤差,但也會(huì)降低系統(tǒng)的響應(yīng)速度,增加系統(tǒng)的超調(diào)量。積分常數(shù)越小,積分的積累作用越弱,這時(shí)系統(tǒng)在過渡時(shí)不會(huì)產(chǎn)生振蕩;但是減小積分常數(shù)會(huì)減慢靜態(tài)誤差的消除過程,消除偏差所需的時(shí)間也較長(zhǎng),但可以減少超調(diào)量,提高系統(tǒng)的穩(wěn)定性。
微分環(huán)節(jié)的作用是阻止偏差的變化,根據(jù)偏差的變化趨勢(shì)進(jìn)行控制,偏差變化得越快,微分控制器的輸出就越大,能在偏差值變大之前進(jìn)行修正。微分作用的引入,將有助于減小超調(diào)量,克服振蕩,使系統(tǒng)趨于穩(wěn)定,加快了系統(tǒng)的跟蹤速度。
4? 結(jié)語
自主研發(fā)了基于STM32單片機(jī)控制,可實(shí)現(xiàn)智能檢測(cè)和遠(yuǎn)程遙控的履帶式管道機(jī)器人。基于激光測(cè)距技術(shù),通過定位控制算法,解算出最優(yōu)路徑,實(shí)現(xiàn)了機(jī)器人在管道內(nèi)的自動(dòng)行走。基于OPENMV模塊的邊緣檢測(cè)技術(shù),實(shí)現(xiàn)了機(jī)器人對(duì)管道內(nèi)壁腐蝕區(qū)域的自動(dòng)檢測(cè)。云臺(tái)作為攝像頭模塊和噴涂裝置的載體,基于經(jīng)典PID算法,設(shè)計(jì)角度和角速度為反饋量的雙閉環(huán)云臺(tái)控制系統(tǒng),實(shí)現(xiàn)了云臺(tái)的穩(wěn)定、可控。通過云臺(tái)的運(yùn)動(dòng)自動(dòng)瞄準(zhǔn)腐蝕區(qū)域,控制噴涂裝置進(jìn)行噴涂工作,實(shí)現(xiàn)了機(jī)器人對(duì)管道內(nèi)壁的自動(dòng)修復(fù)。經(jīng)過理論分析和實(shí)驗(yàn)測(cè)試,基本實(shí)現(xiàn)了對(duì)管道內(nèi)部的自動(dòng)檢測(cè)和修復(fù)。
參考文獻(xiàn)
[1] 祝愨智,吳超,李秋揚(yáng),等.全球油氣管道發(fā)展現(xiàn)狀及未來趨勢(shì)[J].油氣儲(chǔ)運(yùn),2017,36(4):375-380.
[2] 李秋揚(yáng),趙明華,任學(xué)軍,等.中國(guó)油氣管道建設(shè)現(xiàn)狀及發(fā)展趨勢(shì)[J].油氣田地面工程,2019,38(S1):14-17.
[3] 顧亭亭,張明霞.淺析直流電機(jī)雙閉環(huán)調(diào)速系統(tǒng)的設(shè)計(jì)[J].機(jī)電信息,2019(5):28-29.
[4] 朱賢勇,萬曉慧.雙閉環(huán)直流調(diào)速系統(tǒng)優(yōu)化設(shè)計(jì)與Matlab驗(yàn)證[J].內(nèi)燃機(jī)與配件,2018(20):45-48.
[5] 王祎晨.增量式PID和位置式PID算法的整定比較與研究[J].工業(yè)控制計(jì)算機(jī),2018,31(5):123-124.
[6] 葉政.PID控制器參數(shù)整定方法研究及其應(yīng)用[D].北京:北京郵電大學(xué),2016.
 科技創(chuàng)新導(dǎo)報(bào)2020年21期
科技創(chuàng)新導(dǎo)報(bào)2020年21期
- 科技創(chuàng)新導(dǎo)報(bào)的其它文章
- 項(xiàng)目教學(xué)法在中職維修電工實(shí)訓(xùn)教學(xué)中的實(shí)施研究
- 微信結(jié)合CBL在核醫(yī)學(xué)住院醫(yī)師規(guī)范化培訓(xùn)中的應(yīng)用及評(píng)價(jià)
- 信息化背景下“金課”打造在高職高專軟件開發(fā)類課程中的實(shí)踐探索
- 基于TRIZ理論的創(chuàng)新型人才培養(yǎng)途徑分析
- STEAM趣味演示實(shí)驗(yàn)在高職物理教學(xué)中的實(shí)踐探究
- 高職汽車專業(yè)教改中的生本原則定位及實(shí)踐