一種基于多時間尺度FFRLS-AEKF算法的動力電池SOC估計方法
2020-03-02 18:30:47宋偉王潔彭錦旗張涌張福明
時代汽車 2020年18期
宋偉 王潔 彭錦旗 張涌 張福明


摘 要:針對目前電池荷電狀態(tài)(SOC)估計算法在硬件處理單元中計算量大,耗費資源多的問題,提出在SOC估算中增大參數(shù)辨識尺度,利用帶遺忘因子的遞推最小二乘法對電池參數(shù)進行估計。與此同時,利用自適應(yīng)擴展卡爾曼(AEKF)算法對電池進行SOC估計,使算法估計結(jié)果可隨噪聲統(tǒng)計特性變化而自適應(yīng)更新,實現(xiàn)了電池模型參數(shù)與狀態(tài)的聯(lián)合估計,在此基礎(chǔ)上研究不同時間尺度對SOC估算的影響,仿真結(jié)果顯示:隨著辨識尺度的增大,SOC估算精度也會隨之下降,計算時間減少,在權(quán)衡考慮估算精度和計算消耗時間的條件下,可找到一個最優(yōu)時間尺度在既保證SOC估算精度的同時減少硬件的計算量。
關(guān)鍵詞:鋰離子電池 荷電狀態(tài) 最小二乘法 自適應(yīng)擴展卡爾曼濾波法
A Method of Power Battery SOC Estimation Based on Multi-time Scale FFRLS-AEKF Algorithm
Song Wei Wang Jie Peng Jinqi Zhang Yong Zhang Fuming
Abstract:Aiming at the problem that the current battery state of charge (SOC) estimation algorithm is computationally intensive and consumes a lot of resources in the hardware processing unit, it is proposed to increase the parameter identification scale in the SOC estimation, and use the recursive least squares method with forgetting factor. The battery parameters are estimated. At the same time, the adaptive extended Kalman (AEKF) algorithm is used to estimate the SOC of the battery, so that the algorithm estimation result can be adaptively updated with the change of the noise statistical characteristics, and the joint estimation of the battery model parameters and state is realized. Studying the influence of different time scales on SOC estimation, the simulation results show that as the identification scale increases, the SOC estimation accuracy will also decrease, and the calculation time will decrease. Under the conditions of weighing the estimation accuracy and the calculation time, it can be found that the optimal time scale reduces the amount of hardware calculation while ensuring the accuracy of SOC estimation.
Key words:lithium ion battery, state of charge, least square method, adaptive extended Kalman filter method
1 引言
電池模型是參數(shù)估計和SOC估算的基礎(chǔ),常見的電池模型為阻容等效電路模型及其改進形式。目前常見的電池模型參數(shù)估計方法包括離線辨識和在線辨識兩種,離線辨識方法在電池老化或工作狀態(tài)改變的情況下會導(dǎo)致估算精度下降,在線辨識方法可以根據(jù)實時測得的電池電流電壓計算模型的參數(shù),可針對電池老化和不同工作情況下,實現(xiàn)SOC準確預(yù)測[1][2]。
遞推最小二乘法(RLS)是最常用的在線參數(shù)辨識方法,但遞推最小二乘法的記憶長度是無限的,隨著遞推次數(shù)的增加,舊數(shù)據(jù)所占的比重會逐漸增多,使得新數(shù)據(jù)難以起到修正作用,造成估計效果減弱,影響對其后的參數(shù)估計效果,這種情況在時變系統(tǒng)中估計效果會更差。為了避免上述情況的發(fā)生,本文使用帶遺忘因子的遞推最小二乘法(FFRLS)來經(jīng)行參數(shù)辨識。
電池模型參數(shù)辨識和電池SOC估算往往是在同一時間尺度下進行的[3],但在SOC估算中,時間尺度較小會導(dǎo)致處理器運算量大,同時考慮SOC是迅速變化的量。因此,為減少處理器計算量,提出增大參數(shù)辨識時間尺度,本文基于二階RC等效電路模型,使用FFRLS-AEKF算法探究不同辨識時間尺度對SOC估算影響。
2 等效電路模型建立
本文選用二階RC等效電路模型來模擬鋰電池動態(tài)特性,電池模型具體如圖1所示。
其中,R1是電化學(xué)極化電阻,C1是電化學(xué)極化電容,R2是濃差極化電阻,C2是濃差極化電容,由基爾霍夫定律,建立電池模型數(shù)學(xué)方程。
由電路原理 KCL定律,得到關(guān)于電流的數(shù)學(xué)方程如下:
(1)
3 基于FFRLS參數(shù)在線辨識
遞推最小二乘法是基于最小二乘法衍生出的遞推算法,是電池模型參數(shù)辨識最常用的方法,帶遺忘因子的遞推最小二乘法是在遞推最小二乘法中加入遺忘因子,這樣可降低矩陣P(k)中的舊數(shù)據(jù)的占有量,從而防止RLS算法出現(xiàn)數(shù)據(jù)飽和現(xiàn)象,從而得到更為精確的辨識結(jié)果,F(xiàn)FRLS遞推公式如下:
(2)
式(2)中為算法的增益矩陣,為算法的協(xié)方差矩陣,為k時刻系統(tǒng)的參數(shù)矩陣為FFRLS遺忘因子系數(shù),的取值范圍為0.95-0.99之間。
參數(shù)辨識的前提是獲取電池的SOC-OCV曲線,通過電池充放電SOC-OCV實驗,將SOC從0~100%的11個點采用6階曲線擬合,求得平均之后SOC-OCV的關(guān)系方程為
(3)
式中:Uocv為電池開路電壓。
將等效電路模型改寫為離散化時間序列形式
(4)
令
式(4)整理為:
(5)
離散化后有:
(6)
其中
式中k為采樣序列時刻信號,二階RC模型中的參數(shù)可從k1-k5中推導(dǎo)得出。
再令
則有
(7)
進而求得:
(8)
3.1 參數(shù)辨識結(jié)果分析
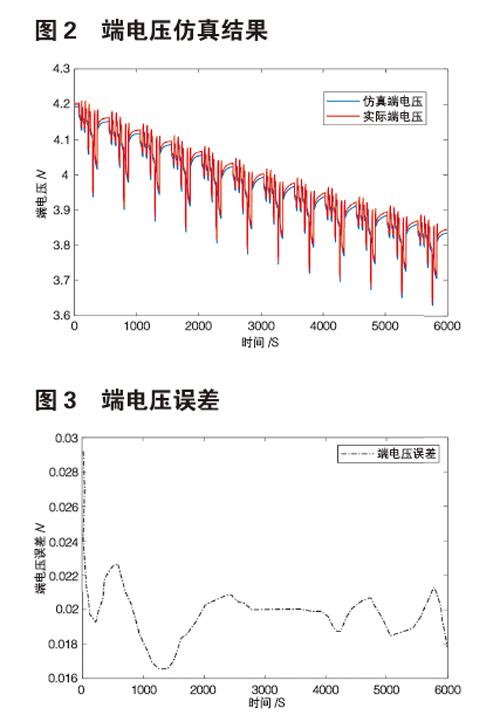
運用FFRLS進行參數(shù)辨識時,根據(jù)辨識經(jīng)驗,本文中遺忘因子設(shè)為0.98。選用18650電池為研究對象,其額定容量為2AH,充放電截至電壓為4.2V和2.6V,取電池在DST工況下的放電結(jié)果。將參數(shù)的辨識結(jié)果的輸入到二階RC模型中,得到仿真端電壓,再將其與實際的端電壓對比,如圖所示:
由圖2和圖3知,由FFRLS辨識出來的參數(shù)帶入等效電路模型中得到的端電壓值與真實端電壓值十分接近,誤差小于3mv。由圖3可以看出,誤差較大的時刻在仿真初始階段,這是因為模型參數(shù)初值選取有較大偏差造成的,但在辨識中后期各參數(shù)的辨識值變得較為平緩,誤差也在逐漸減小。 說明FFRLS算法在動態(tài)工況下的辨識效果是可靠的。
4 基于AEKF算法的SOC估算
傳統(tǒng)安時積分法電池SOC計算公式(9)為
(9)
4.1 AEKF算法流程
卡爾曼濾波(Kalman filter,KF)是一種通過閉環(huán)控制來實現(xiàn)狀態(tài)變量的最優(yōu)估計方法[4],但KF只適用于線性系統(tǒng),擴展卡爾曼濾波EKF用于解決非線性系統(tǒng)的估計問題,然而EKF也有局限性,它將系統(tǒng)的噪聲假設(shè)為固定不變的高斯白噪聲,對于噪聲統(tǒng)計特征未知的系統(tǒng),依舊會產(chǎn)生誤差,電池的系統(tǒng)噪聲和觀測噪聲并不是正態(tài)分布的,因此噪聲特性的變化對于EKF估算SOC也會造成影響,Sage和Husa建立的線性離散系統(tǒng),提出了一種自適應(yīng)噪聲統(tǒng)計特性的估計方法,即AEKF[5],流程如下:
對于電池系統(tǒng),其系統(tǒng)方程和觀測方程為
(10)
聯(lián)合式(1)和(9)進行離散化處理,得到電池等效模型的狀態(tài)方程:
a、初始值設(shè)置:
(12)
b、先驗估計、測量矩陣更新及誤差協(xié)方差矩陣更新:
(13)
c、卡爾曼增益計算:
(14)
d、當(dāng)前時刻狀態(tài)變量最優(yōu)估計值、更新協(xié)方差矩陣:
(15)
e、自適應(yīng)噪聲協(xié)方差更新:
(16)
式中:代表k時刻狀態(tài)變量的預(yù)測值,代表k時刻狀態(tài)變量的最優(yōu)估計值;Qk和Rk分別為系統(tǒng)噪聲ωk和觀測噪聲νk的協(xié)方差;Pk為誤差協(xié)方差矩陣;Kk代表卡爾曼增益。
5 基于FFRLS-AEKF的模型參數(shù)與狀態(tài)聯(lián)合估計
在確定初始值SOC(0)、P(0)、U1(0)、U2(0)、、d、θ(0)、Q(0)、R(0)后,即可根據(jù)式(2)開始實時辨識模型參數(shù),然后將參數(shù)代入式(12)~(16)即可開始估算狀態(tài)變量矩陣,由式(11)知矩陣第1行的值就是SOC。
5.1 建模仿真與分析
5.1.1 單時間尺度FFRLS-AEKF聯(lián)合估計
將模型參數(shù)辨識尺度和SOC估算時間尺度設(shè)為同一時間尺度L,L為1s的估計結(jié)果如圖所示
圖4所示為DST測試工況下單時間尺度FFRLS-AEKF算法的SOC估計值與SOC真實參考值曲線,圖5為其誤差曲線。
5.1.2 多時間尺度FFRLS-AEKF聯(lián)合估計
將模型參數(shù)辨識尺度L從1s至30s逐漸增大,選取時間尺度L=5s,10s,20s,30s下的SOC結(jié)果表示不同時間尺度下的SOC估計結(jié)果。可得到不同時間尺度下SOC誤差與估算消耗時間如圖6所示:
從圖中可以看出,不同時間尺度下SOC的精度是呈現(xiàn)非線性變化的,時間尺度在5s以內(nèi),SOC的誤差幾乎呈線性增長,但隨著參數(shù)辨識時間尺度的增大(L>5),SOC誤差有所下降,時間尺度增大代表電池在這段時間內(nèi)的參數(shù)是不變的,相比較小時間尺度(L<5),參數(shù)是穩(wěn)定的但是估算精度下降,這意味著在同一硬件單元中,可以減少處理器的運算時間,當(dāng)時間尺度(L<5)時,計算消耗時間隨時間尺度呈指數(shù)增長,當(dāng)時間尺度(L>5)時,計算消耗時間隨時間尺度增大下降不明顯,此時的誤差也較大。因此,綜合計算成本和估算精度,最佳的時間尺度應(yīng)選取在誤差線和時間消耗線的交點處(L=2.5)。這時候的誤差在可接受范圍內(nèi),計算量也大幅減少。當(dāng)L=2.5時,DST工況下SOC估計值、SOC真實參考值曲線及其誤差曲線如圖7、8所示。
由圖7、8可見,當(dāng)選取合適的時間尺度(L=2.5)時,算法的預(yù)測值能夠很好的跟隨參考值,誤差在4%以內(nèi),不僅保證了估算的穩(wěn)定性和精度,還節(jié)約了計算成本。因此,相比之下,多時間尺度FFRLS-AEKF對電池動態(tài)特性跟蹤效果比單時間尺度更好。
6 結(jié)論
由于工作狀態(tài)變化和老化會導(dǎo)致電池內(nèi)部參數(shù)發(fā)生改變,本文利用FFRLS算法實時辨識電池模型參數(shù),并在DST工況下驗證了辨識方法。針對SOC算法在硬件處理單元中計算量大,消耗資源多問題,提出使用多時間尺度FFRLS-AEKF算法聯(lián)合估計SOC,研究了不同辨識時間尺度對SOC估算的影響,結(jié)果顯示,隨著辨識尺度的增大,SOC估算精度也會隨之下降,計算時間減少;在權(quán)衡考慮估算精度和計算消耗時間的條件下,時間尺度選取為2.5s可以既保證SOC的估算精度同時減少硬件的計算量,更加有利于SOC的估算。
基金項目:動力電池?zé)峁芾砑俺山M一體化關(guān)鍵技術(shù)開發(fā)? 項目編號:BE2017008-1,BE2017008-4
參考文獻:
[1]彭湃,程漢湘,陳杏燦,等.基于自適應(yīng)卡爾曼濾波的鋰電池SOC估計[J]. 電源技術(shù),2017(11):1541-1544.
[2]于海波,李賀龍,盧揚,等.基于混合卡爾曼濾波和H∞濾波的動力電池SOC估計[J].電力電子技術(shù),2018,52(12):63-66.
[3]印學(xué)浩,宋宇晨,劉旺,等.基于多時間尺度的鋰離子電池狀態(tài)聯(lián)合估計[J]. 儀器儀表學(xué)報,2018,039(008):118-126.
[4]魏克新,陳峭巖. 基于自適應(yīng)無跡卡爾曼濾波算法的鋰離子動力電池狀態(tài)估計[J]. 中國電機工程學(xué)報,2014,000(003):445-452.
[5]唐帥帥,高迪駒. 基于自適應(yīng)卡爾曼濾波的磷酸鐵鋰電池荷電狀態(tài)估計研究[J]. 電子測量技術(shù),2018,041(014):1-5.
