基于奇異攝動法的機械設備狀態監測及診斷技術仿真分析
2020-03-03 04:24:28
工業加熱 2020年1期
(寶雞職業技術學院,陜西 寶雞 721000)
本文研究的自動裝填系統存在一定不足,不足主要源于較低的負載自重比、過大結構剛性帶來的動態接觸沖擊,因此本文選擇了自動裝填系統的核心傳輸機械臂作為研究對象,傳輸機械臂安裝有柔性關節、柔性連桿,而為了明確車體振動等因素對傳輸機械臂的影響,正是本文圍繞基于奇異攝動法的機械設備狀態監測及診斷技術仿真開展具體研究的原因所在。
1 基于奇異攝動法的機械設備狀態監測
1.1 系統結構及工作原理
圖1為自動裝填系統結構圖,該系統由推彈機、鏈式回轉彈倉、傳輸機械臂組成,本文研究的自動裝填系統則包括推彈機、鏈式回轉彈倉、傳輸機械臂[1]。作為系統的核心部件,傳輸機械臂承載著安裝重任,整個系統的精度也會直接受到傳輸機械臂的影響,圖2為傳輸機械臂簡圖。結合圖2不難發現,傳輸機械臂由三個部分組成,分別包括固定支架部分、升降部分、翻轉部分[2]。

圖1 自動裝填系統結構圖
底盤上安裝有傳輸機械臂的固定支架部分,底盤的運動會帶動其運動,外側則裝有鏈輪和傳動輪,鏈輪共3個,主動鏈輪位于下方,張緊鏈輪安裝于中部鏈條松邊,被動鏈輪安裝于上部,由此即可保證傳動過程中鏈條擁有適當張緊力,傳動鏈脫齒問題也能夠得到較好避免,機械臂升降部分與傳動鏈緊邊連接,主動鏈輪轉動會帶動機械臂升降部分沿導軌上下滑動[3]。升降部分安裝有翻轉部分的基座,同時具備翻轉指定角度和隨升降部分運動的能力。升降部分電機和減速器能夠直接驅動翻轉部分的角度旋轉運動,傳動鏈則負責帶動升降部分的垂直運動,為保證整個系統的穩定性,傳輸機械臂整體呈左右對稱分布[4]。
1.2 傳輸機械臂動力學模型
考慮振動帶來的影響,本文將基座振動引入動力學建模,由此建模充分考慮了三種振動類型,即基座垂直振動、基座俯仰振動和基座搖擺振動,三種類型的振動均可視作外界干擾,圖3為基座垂直振動傳輸機械臂簡圖。

圖3 基座垂直振動傳輸機械臂簡圖
圖3中,A0為車體及安裝架;B0為A0質心;A1為機械臂升降部分;A2為機械臂翻轉部分;X為未發生垂直振動時車體所在平面;Y為垂直振動帶來的車體及安裝架位移;θ為相對于X軸翻轉部分的夾角[5]。
圖4為基座俯仰振動傳輸機械臂簡圖,XOY為系統慣性坐標系,xOy為與車體相連的局部坐標系。
圖4中,A0為車體及安裝架;B0為A0質心;L0為B0與旋轉中心O的距離;θ1為俯仰振動角度;A1為機械臂升降部分;A2為機械臂翻轉部分;L1為支臂長;θ為相對車體旋轉角度;I為繞定軸O旋轉時車體轉動慣量。
圖5為座搖擺振動傳輸機械臂簡圖,XYZ為慣性坐標系;A0、A1、A2分別為車體及安裝架、升降部分、翻轉支臂,其中A0上的坐標系為x1y1z1,A1上的坐標系為x2y2z2,A2上的坐標系為x3y3z3;m0、m1、m2分別為車體質量、升降部分質量、翻轉支臂質量[6]。
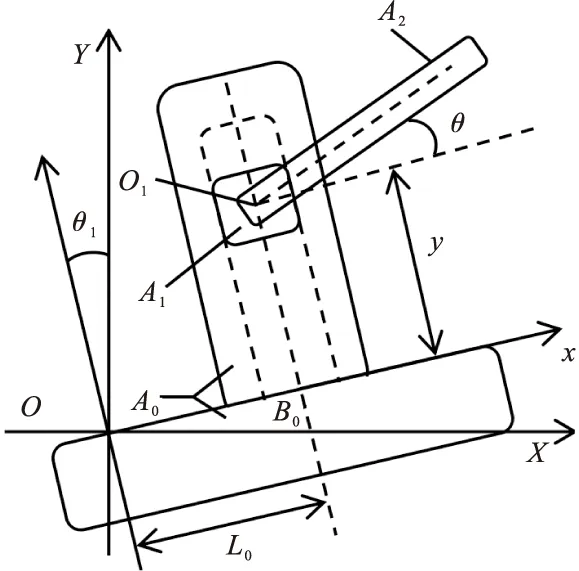
圖4 基座俯仰振動傳輸機械臂簡圖

圖5 座搖擺振動傳輸機械臂簡圖
2 基于奇異攝動法的機械設備診斷仿真
2.1 基座振動雙重柔性機械臂動力學模型
結合上文分析,可得出所受的基座振動雙重柔性機械臂簡圖,如圖6所示。圖6中,XOY為系統慣性坐標系、X1O1Y1為與柔性桿相連的局部坐標系;A0、A1、A2、A3分別為車體及安裝架、系統升降部分、翻轉支臂、傳動鏈等效質量體;k1、k2分別表示升降部分關節等效彈簧剛度系數、翻轉部分關節扭簧的剛度系數;I、J分別為翻轉關節電機轉子轉動慣量、附加到電機軸的翻轉支臂轉動慣量[7]。
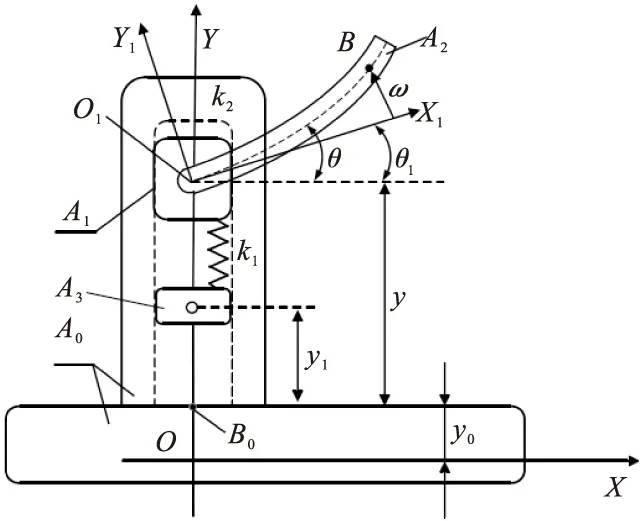
圖6 基座振動雙重柔性機械臂簡圖
結合圖6,取前兩階柔性臂模態,由此可求得式(1)、式(2)所受的機械臂本體運動坐標和柔性振動坐標動力學方程。

(1)
(2)
進一步分析可得出式(3),該式展示了系統的柔性關節子系統正定慣量矩陣、柔性關節等效彈簧剛度系數矩陣、柔性臂剛度系數矩陣。
(3)
為了滿足柔性機械臂系統的控制要求,對柔性機械臂進行模態分析是必不可少的,只有準確的掌握了柔性機械臂在各種形態下的振動頻率,才能更好地設計振動控制器抑制柔性機械臂的彈性振動[8]。
2.2 奇異攝動模型
開展奇異攝動分解,可在系統整體運動中分解出柔性臂振動和柔性關節振動,三個不同的子系統也能夠由此形成,即式(4)所示的剛性運動系統慢變子系統、式(5)所示的柔性快變子系統1、式(6)所示的柔性臂振動快變子系統2。
(4)
(5)
(6)
2.3 監測、診斷、控制設計

(7)

(8)
圖7和圖8表示初值為x=[0-1-0.50.51],z=1,取ε=0.01時,在狀態反饋作用下的閉環系統的狀態軌線[9]。對于任意給定的初始狀態,狀態軌線沿近似于垂直方向的快流形迅速降至指定慢流形,體現了邊界層系統的運動時間是相對短暫的(τ=t/ε),系統狀態沿慢流形最終運動到原點。

圖7 閉環系統的慢狀態軌線

圖8 閉環系統的快狀態軌線
采用速度反饋調節法控制柔性關節振動快變子系統1,輸入為電機輸出軸旋轉角速度與機械臂運動速度的差值,由此可得出系統柔性關節振動輸入uf1如式(9)所示,該式得出需應用反饋矩陣[10]。
(9)
采用線性二次型最優控制柔性臂模態振動快變子系統2,最終可得出式(10)所示的快變子系統2控制器。
uf2=-E-1BfPzf
(10)
2.4 仿真結果與分析
為驗證監測、診斷、控制設計的實用性,基于表1、表2所示的系統模型及控制器參數進行仿真。

表1 系統模型及控制器參數(一)

表2 系統模型及控制器參數(二)
結合表1、表2,可得出圖9所示的不抑制柔性振動的系統廣義位移,以及圖10所示的抑制雙重柔性振動的系統廣義位移,結合圖9、圖10不難發現,本文研究得出的監測、診斷、控制設計有效實現了基座振動影響的補償,且機械臂精確定位控制也能夠在2s內完成,整個系統的穩定性因此得到了較好保障,奇異攝動法的應用價值也同時得到了直觀證明。
圖9 不抑制柔性振動的系統廣義位移
3 結 論
綜上所述,奇異攝動法能夠較好服務于機械設備狀態監測及診斷技術仿真,在此基礎上,本文涉及的基座振動雙重柔性機械臂動力學模型、奇異攝動模型等內容,則提供了可行性較高的奇異攝動法應用路徑,而為了更好發揮奇異攝動法應用價值,多種基座振動耦合效應的考慮、實驗平臺的應用同樣需要得到重視。

圖10 抑制雙重柔性振動的系統廣義位移
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
天天愛科學(2020年6期)2020-09-10 07:22:44
當代工人(2020年8期)2020-05-25 09:07:38
數學物理學報(2017年6期)2018-01-22 02:26:40
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
家庭影院技術(2017年9期)2017-09-26 03:41:45
科技知識動漫(2016年8期)2016-07-29 20:40:09
