土豆收獲割秧一體機的設計*
2020-03-04 03:44:42
機械制造 2020年1期
關鍵詞:設計
濱州學院 機電工程學院 山東濱州 256603
1 設計背景
土豆的營養(yǎng)價值高,藥理作用很多,歷來深受廣大群眾的喜愛,市場銷量非常大。但是,土豆在收獲過程中存在一些問題,尤其是人工收獲時費時、費力、損耗大,并且存在漏薯。對此,筆者設計了一種自動化程度比較高的土豆收獲割秧一體機,解決土豆收獲及割秧時的問題,實現(xiàn)單人省力裝袋和機械化運輸,以減少農(nóng)民在盛夏時的戶外工作時間[1]。
2 整機結構
土豆收獲割秧一體機結構如圖1所示,由扶禾機構、秧苗切碎返土機構、夾持輸送機構、傳送裝袋機構、平板式齊平器、耕地機構、塊莖分離機構等組成[2]。扶禾機構對要收獲的土豆莖葉完成聚攏、扶起動作,并引入夾持輸送機構。夾持輸送機構中的復合皮帶兩側(cè)分布多個張緊輪,主要有動輪和不動輪兩種,用于保證有更大且比較均勻的夾持力夾緊皮帶,同時不誤傷莖葉。塊莖分離機構不僅可以分離土豆塊莖,而且可以使切口規(guī)整,并盡量貼近土豆的塊莖頂端,同時將分離出的塊根和莖葉輸送至相對應的秧苗切碎返土機構。秧苗切碎返土機構由多個碎苗輪組成,由皮帶帶動運行。采摘完成的土豆隨夾持輸送機構進入傳送裝袋機構,由此完成土豆的采摘收獲。
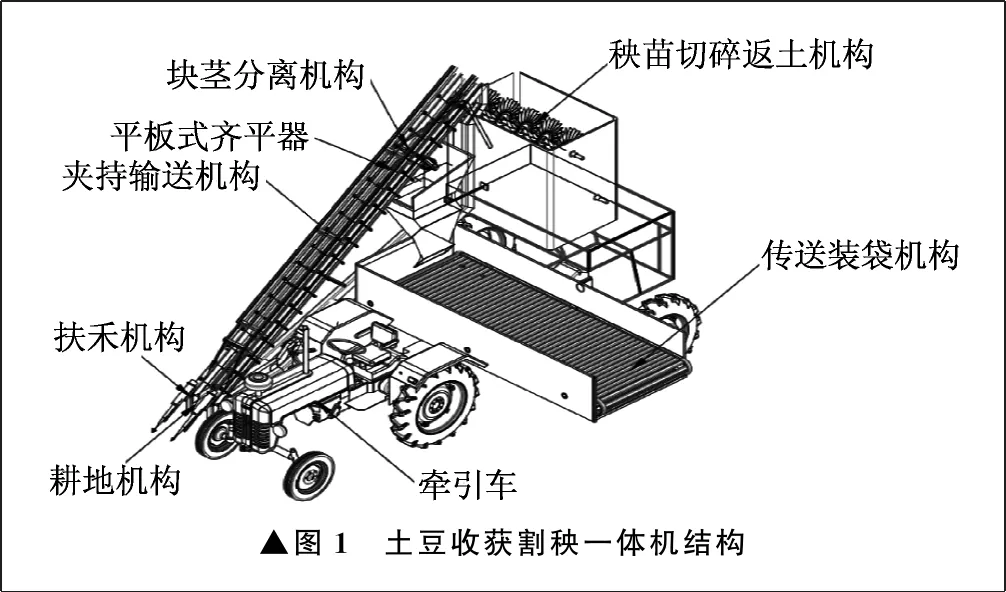
▲圖1 土豆收獲割秧一體機結構
3 工作原理
土豆收獲割秧一體機在控制系統(tǒng)和各個機構的相互配合作用下,實現(xiàn)采摘、輸送、塊莖分離、秧苗切碎返土及裝袋等功能。啟動土豆收獲割秧一體機,放下耕地機構至適當位置。扶禾機構中的扶禾器貼近地面,并在感應器的作用下始終與地面維持一段距離。操作人員開動拖車,帶動整機開始有序工作。扶禾機構將土豆莖葉聚攏、扶起,并引入夾持輸送機構。在夾緊輸送機構向斜后上方運動所產(chǎn)生的拔起力的作用下,已松動滑落的土豆塊莖被整個拔出,并隨夾持帶輸送至塊莖分離機構,順利完成根葉分離。完成塊莖分離的土豆落入傳送裝袋機構,同時將分離后的塊根和莖葉輸送至對應的秧苗切碎返土機構。收獲完成后,操作人員關閉發(fā)動機,單獨運行傳送裝袋機構,實現(xiàn)單人省力裝袋和機械化運輸。秧苗切碎返土機構的工作實現(xiàn)了生態(tài)的循環(huán)性和可持續(xù)性發(fā)展,在一定程度上保護了生態(tài)環(huán)境[3]。
4 關鍵部分設計
4.1 扶禾、夾持輸送和塊莖分離機構
扶禾、夾持輸送和塊莖分離機構結構如圖2所示。為了提高土豆的收獲效率,扶禾機構中設計了扶禾器。扶禾器貼近地面,并在感應器的作用下始終與地面維持一段距離,這樣保證了扶禾機構將倒伏至地面的莖葉扶起、夾持,既降低漏拔率,又避免嗆土[4-5]。
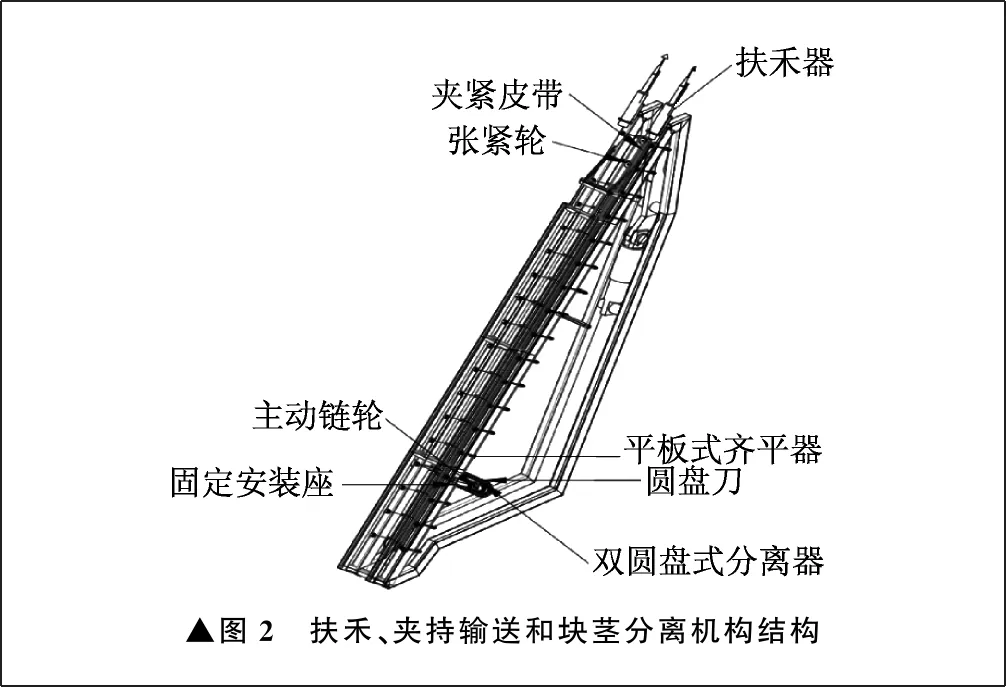
▲圖2 扶禾、夾持輸送和塊莖分離機構結構
4.2 秧苗切碎返土機構
為了實現(xiàn)生態(tài)的循環(huán)性和可持續(xù)性發(fā)展,并在一定程度上保護生態(tài)環(huán)境,符合社會發(fā)展理念,設計了秧苗切碎返土機構[6],其結構如圖3所示。秧苗切碎返土機構主要由皮帶輪、皮帶、碎苗輪、傳動軸組成。扶禾機構對要收獲的土豆莖葉完成聚攏、扶起動作,并引入夾持輸送機構。由夾持輸送機構運輸至塊莖分離機構,完成對土豆的塊莖分離。分離以后的塊根和莖葉輸送至對應的秧苗切碎返土機構,莖葉和塊根在碎苗輪的作用下完成破碎和返土。秧苗切碎返土機構由皮帶輪帶動運轉(zhuǎn)。
4.3 傳送裝袋機構
土豆收獲完成后,為了實現(xiàn)單人省力裝袋和機械化運輸,設計了傳送裝袋機構,其結構如圖4所示。傳送裝袋機構主要由傳送帶和傳動軸組成。完后塊莖分離以后的土豆落入傳送裝袋機構,操作人員關閉發(fā)動機,使整機停止運行,并單獨使傳送裝袋機構開始工作,完成單人省力裝袋和機械化運輸,可以大大提高工作效率[7-8]。
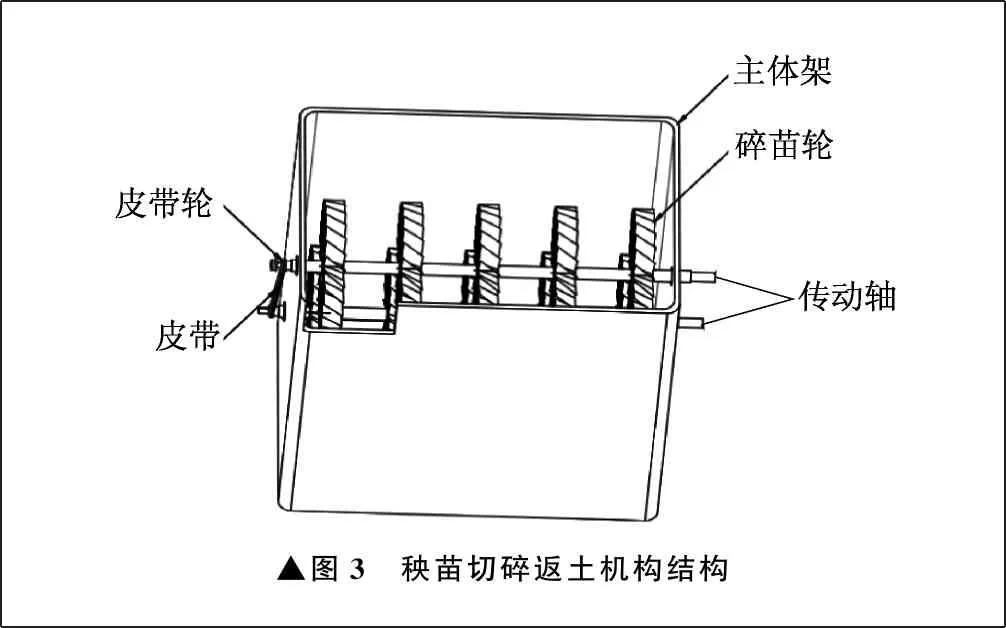
▲圖3 秧苗切碎返土機構結構
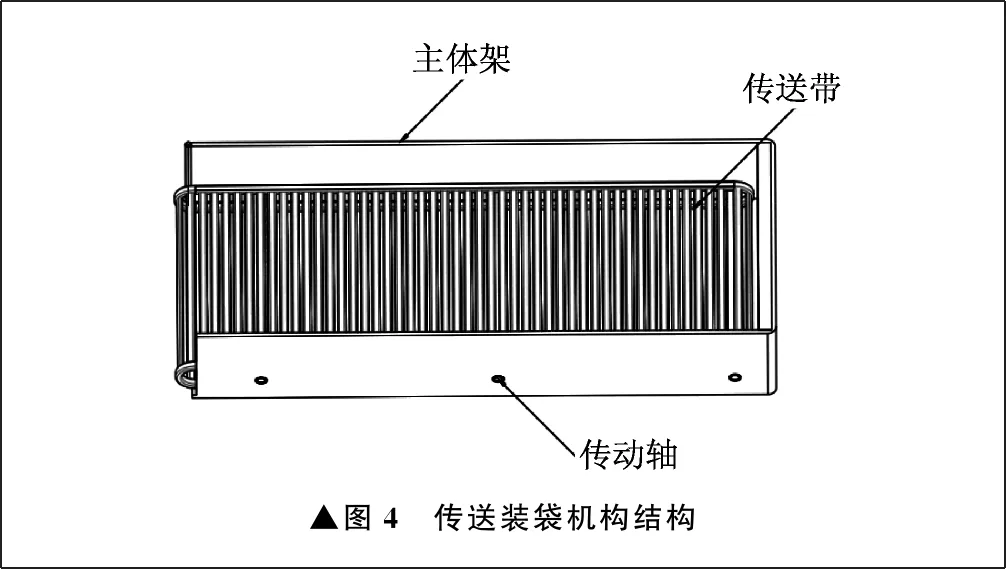
▲圖4 傳送裝袋機構結構
5 控制系統(tǒng)
為使整機各機構能夠合理順暢地工作,筆者以機電一體化為基礎,通過電子控制管理系統(tǒng)對土豆收獲割秧一體機進行集成控制,實現(xiàn)收獲、割秧、塊莖分離等一系列處理工藝的自動化[9]。電子控制管理系統(tǒng)以MK60單片機為控制核心,同時采用繼電器、L298N電機驅(qū)動器、光電傳感器和降壓模塊等進行輔助,實現(xiàn)自動收獲、割秧、塊莖分離等功能。繼電器的種類較多,根據(jù)產(chǎn)品實際要求選擇電壓繼電器,通過高低電平的觸發(fā)控制電機開關。同時,在模塊電源方面設計了過流和過壓保護,進一步提高電子控制管理系統(tǒng)抵抗電壓和電流沖擊的能力。
6 樣機制作與試驗
對土豆收獲割秧一體機進行樣機制作,試驗收獲、割秧、輸送等功能。結果表明,土豆收獲割秧一體機能夠順利實現(xiàn)收獲、輸送和割秧等工序的自動化,每分鐘可收獲43 kg土豆,收獲率達85%~90%。未收獲的土豆主要集中在土地深側(cè)或為小型土豆,對土豆表面的破壞程度小。夾持輸送機構可連續(xù)流暢地進行傳送,塊莖分離機構可根據(jù)土豆大小調(diào)節(jié)螺紋桿的固定高度,進而調(diào)節(jié)土豆的切口高度。經(jīng)試驗,設定夾持輸送機構的上行速度為5~7 cm/s,扶禾機構將莖葉聚攏后進入夾持輸送機構,并設定延時0.5 s夾持輸送機構再次運轉(zhuǎn),此時塊莖分離機構的效率最佳,約為90%。后期改進時可考慮在傳送裝袋機構中附加水管,以便沖洗土豆[10]。
7 結束語
筆者設計了土豆收獲割秧一體機,可以自動連續(xù)實現(xiàn)收獲、割秧、塊莖分離等功能,環(huán)保,安全。扶禾機構和夾持輸送機構銜接順暢,夾持輸送機構中的復合皮帶兩側(cè)分布多個張緊輪,主要為動輪和不動輪兩種,用于保證有更大且均勻的夾持力夾緊皮帶,并且不誤傷莖葉,使夾持輸送機構運轉(zhuǎn)更加平穩(wěn)順暢。采用間距可調(diào)節(jié)的塊莖分離機構進行塊莖分離,不僅能適應不同尺寸的土豆,而且能減小對土豆的破壞,進而提高收獲和塊莖分離的效率。完成塊莖分離的土豆落入傳送裝袋機構,分離后的塊根和莖葉輸送至對應的秧苗切碎返土機構。收獲完成后,操作人員關閉發(fā)動機,單獨運行傳送裝袋機構,實現(xiàn)單人省力裝袋和機械化運輸。
秧苗切碎返土機構實現(xiàn)了生態(tài)的循環(huán)性和可持續(xù)性發(fā)展,在一定程度上保護了生態(tài)環(huán)境。這一土豆收獲割秧一體機能夠有效提高土豆收獲處理的生產(chǎn)效率,具有較好的市場應用前景。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
