上肢外骨骼機器人的阻抗控制及關節試驗分析
2020-03-04 14:38:45楊錚芃張忠松楊樹慶許壯壯王博
科學與財富 2020年36期
楊錚芃 張忠松 楊樹慶 許壯壯 王博

摘 要:外骨骼機器人技術的發展,在增強人類肌肉力量并持久地進行繁重負載任務上,取得了極大的進步。以康復醫療為例,上肢外骨骼機器人設計協同運動力學、控制論、圖文圖像處理技術和生物醫學技術,尤其是通過自適應阻抗控制和試驗實驗,在人表面肌電阻抗調節和關節實驗中,被證實為科學、有效的控制方法。本文探討了上肢外骨骼機器人的控制現狀、進一步分析了其阻抗控制效能,分析了關節試驗的效果,以為上肢骨骨骼機器人的自適應控制提供可行性借鑒。
關鍵詞:上肢外骨骼機器人;阻抗控制;關節試驗
0、引言
隨著21世紀智能化時代的到來,人類在物質生活領域的進步,疾病種類和類型也呈增加化趨勢。以腦卒中后偏癱為例,對家庭和社會造成了極大的負擔和壓力[1]。康復醫學為此,通過簡單器械配合專業醫師指導以滿足智能化需求的發展,已不足以滿足康復患者的需求;由此上肢外骨骼康復機器人自適應控制系統以達到阻抗控制和關節試驗安全性效果的研究,為機器人的控制奠定了基礎。現就上肢外骨骼機器人的阻抗控制及關節試驗分析如下:
1、上肢外骨骼機器人的控制現狀
當前的大多數上肢外骨骼康復機器人主要基于位置控制,如搬運機器人在規定位置的倉庫搬運、制定地點裝貨、設計路線卸貨等。在工業現場應用中,該類機器人多以位置控制、速度控制、加速度控制等來完成搬運、焊接、噴漆等工作[2]。從康復醫學器械的改進來看,將有效地控制力的輸出,實現引入力控的阻抗控制,在動態化分析機械臂末端與環境間的動態關系上,對實現力控制和位置控制的作用效果較為明顯;即通過構建一個系統使得執行器(機械臂)能同時控制力/位置。
2、阻抗控制效能
阻抗控制原理和電工電子學中的阻抗概念范疇不同,但本質相同。以機器人物理系統為例,可通過對任意自由度機器人來施加一個力或位移速度,來實現互相耦合的效果。機器人與外界的動態作用調節為阻抗控制的目標,通過外界環境系統的干擾,來實現機器人受外界力而偏離既定運動的擾動響應[3]。具體如圖1所示:
注:Md—質量,變大以對環境產生沖擊運動,導致軌跡誤差大,系統響應慢。
Bd—阻尼=摩擦,變大減小響應力超調,系統響應慢,能量損耗大。
Kd—彈簧作用,距離中心位置越遠,受彈力越大。越小表明彈簧剛度系數越小,力控制穩態誤差越小,系統響應越慢。
在上肢外骨骼機器人的阻抗控制中,環境剛度大,則阻抗剛度小;環境剛度小,阻抗剛度大,控制的順應性越好。
以機器人和機電一體化研究所(DLR Institute of Robotics and Mechatronics)研發的機械臂的DLR為例,系統主要包括機械臂本體、機器人控制柜(KUKA Sunrise Cabinet)、示教器(KUKA smartPAD)、安裝KUKA Sunrise.Workbench 的開發計算機四大組件。在設計層面,整體增加了機器人觸覺,在插孔動作控制上更人性化[4]。具體控制實現方法為—通過增加連桿端的編碼器傳感器、關節力矩傳感器:測量機械臂振動,主動阻尼減震,大幅度提高了機器人的動態運動性能;最短速度檢測出與環境的碰撞情況。
3、關節試驗效果
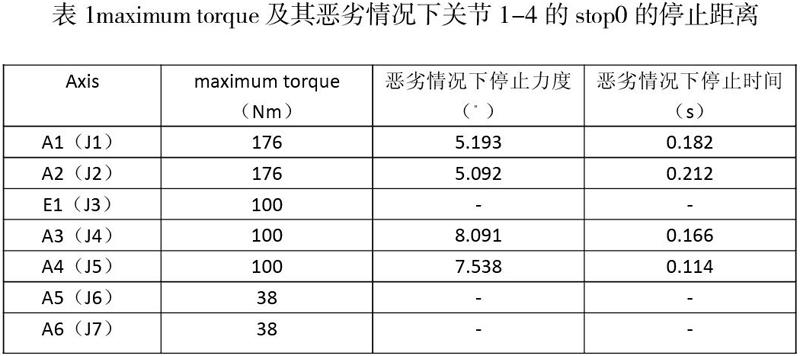
阻抗控制可首先檢測出不安全碰撞,將關節力矩傳感器精度控制在±2% of the maximum torque,比之無力傳感器協作機器人,該機器人的各關節實驗結果如下如下表1所示。
鑒于冗余自由度加良好的折疊性及較短的腕部軸使得機器人更加靈巧,以單薄的身體實現12公斤的負載,在機構設計、材料、控制方面更具比較優勢。
結束語:
通過分析上肢外骨骼機器人阻抗控制和關節試驗,實現了力控、力控機械臂、各種應用的梯隊位置,在后續的康復治療患者中,更具自適應控制優勢。
參考文獻:
[1]劉冰,李寧,于鵬, 等.上肢康復外骨骼機器人控制方法進展研究[J].電子科技大學學報,2020,49(5):641-651.
[2]孫定陽,沈浩,郭朝, 等.繩驅動柔性上肢外骨骼機器人設計與控制[J].機器人,2019,41(6):834-841.
[3]孫超,苑明海,周灼, 等.外骨骼上肢康復機器人的結構設計與仿真研究[J].機電工程,2019,36(4):383-386.
[4]王峰,喻洪流,李新偉, 等.一種輪椅平臺的上肢外骨骼康復機器人的研究[J].中國康復醫學雜志,2019,34(7):819-823.
作者簡介:
楊錚芃(1999-),男(漢族),福建漳州人,本科,就讀于吉林建筑大學? 學生,研究方向:工程機械結構設計。
張忠松(1977-),男(漢族),吉林長春人,博士,任職于吉林建筑大學 講師,研究方向:工程機械結構分析、智能工藝決策。
楊樹慶(1997-),男(漢族),甘肅靖遠人,本科,就讀于吉林建筑大學? 學生,研究方向:工程機械結構設計。
許壯壯(1997-),男(漢族),河南蘭考人,本科,就讀于吉林建筑大學? 學生,研究方向:工程機械結構設計。
王博(1998-),男(漢族),吉林集安人,本科,就讀于吉林建筑大學? 學生,研究方向:工程機械結構設計。
(吉林建筑大學機械工程專業? ?吉林? 長春? 130118)
