一種基于混沌理論和LSTM的GPS高程時(shí)間序列預(yù)測(cè)方法
2020-03-06 05:36:32李世璽孫憲坤張仕森
導(dǎo)航定位學(xué)報(bào) 2020年1期
李世璽,孫憲坤,尹 玲,張仕森
0 引言
利用全球定位系統(tǒng)(global position system,GPS)連續(xù)觀測(cè)高程數(shù)據(jù)進(jìn)行噪聲分析或形變監(jiān)測(cè)時(shí),缺失數(shù)據(jù)的數(shù)量以及缺失數(shù)據(jù)的連續(xù)程度都會(huì)對(duì)分析
結(jié)果產(chǎn)生較大影響[1],因此需要提高缺失數(shù)據(jù)的補(bǔ)全或預(yù)測(cè)精度,滿足分析需求,從而保證分析的可靠性。基于神經(jīng)網(wǎng)絡(luò)的預(yù)測(cè)方法與一些傳統(tǒng)方法相比,則具有很強(qiáng)的非線性特征學(xué)習(xí)能力[2-5]。如文獻(xiàn)[6]利用長短期記憶神經(jīng)網(wǎng)絡(luò)(long short-term memory,LSTM)長時(shí)間的特征記憶能力對(duì)上海佘山站的高程坐標(biāo)進(jìn)行了預(yù)測(cè),其30 d滾動(dòng)預(yù)測(cè)結(jié)果的均方根誤差約為 2.4 mm,擬合趨勢(shì)也較為準(zhǔn)確,但使用了缺失數(shù)據(jù) 2端所有的可用數(shù)據(jù)訓(xùn)練模型,不符合實(shí)際應(yīng)用中的預(yù)測(cè)要求,且缺乏對(duì)GPS時(shí)間序列自身特性的分析。而在時(shí)間序列預(yù)測(cè)問題中,采用結(jié)合了時(shí)間序列數(shù)據(jù)自身特點(diǎn)的混合預(yù)測(cè)模型,往往能夠取得更好的預(yù)測(cè)效果,而非某種預(yù)測(cè)模型的簡單應(yīng)用[7-10]。
由于GPS高程時(shí)間序列是1種非平穩(wěn)非線性的1維時(shí)間序列,它包含了確定的長期趨勢(shì)、周期性的震蕩模式,以及短期的非線性變化規(guī)律和噪聲[11],其中在我國境內(nèi)噪聲通常為白噪聲(white noise,WN)加閃爍噪聲(flicker noise,F(xiàn)N)[12-13]。遍布于整個(gè)時(shí)間序列的噪聲,使模型的整體預(yù)測(cè)結(jié)果具有不確定性,不同頻率的信號(hào)相互交疊既掩蓋了序列原本的變化規(guī)律,同時(shí)也增加了重復(fù)的時(shí)間序列信息,它們都使模型學(xué)習(xí)序列特征更加困難。因此提高時(shí)間序列的預(yù)測(cè)精度,應(yīng)先將噪聲分離,并從原始的1維序列中挖掘更多有效的特征模式用于預(yù)測(cè)。
混沌時(shí)間序列預(yù)測(cè)方法是著眼于分析時(shí)間序列自身特點(diǎn)的 1類非線性時(shí)間序列預(yù)測(cè)方法,它首先通過降噪減少序列的無用信息,再利用序列各時(shí)間節(jié)點(diǎn)間的相關(guān)性以及序列片段包含信息量的多少,將1維時(shí)間序列映射到高維相空間,從而恢復(fù)出時(shí)間序列系統(tǒng)特征,最后使用多特征序列進(jìn)行預(yù)測(cè)。混沌預(yù)測(cè)方法在許多領(lǐng)域都已成功應(yīng)用,如文獻(xiàn)[14]將 1維的徑流量時(shí)間序列進(jìn)行相空間重構(gòu),恢復(fù)了復(fù)雜水文系統(tǒng)的時(shí)空特征,并將重構(gòu)后的多維序列作為預(yù)測(cè)模型的輸入進(jìn)行訓(xùn)練,提高了長江徑流量預(yù)測(cè)的穩(wěn)定性和準(zhǔn)確性。文獻(xiàn)[15]通過求取嵌入維數(shù)與延遲時(shí)間,把人流量時(shí)間序列重構(gòu)為多維度空間矢量,將有規(guī)律的混沌吸引子恢復(fù)出來后再進(jìn)行預(yù)測(cè)。文獻(xiàn)[16]應(yīng)用混沌理論,重構(gòu)GPS衛(wèi)星鐘差序列并進(jìn)行了預(yù)測(cè),取得了較好的短期預(yù)測(cè)效果。
因此,本文嘗試將混沌理論與 LSTM相結(jié)合,提出1種新的預(yù)測(cè)模型。首先對(duì)時(shí)間序列進(jìn)行經(jīng)驗(yàn)?zāi)B(tài)分解(empirical mode decomposition,EMD)并降噪,去除序列包含的白噪聲部分,然后求取時(shí)間序列的延遲時(shí)間,嵌入維數(shù)以及李雅普諾夫指數(shù),證明GPS高程站心坐標(biāo)時(shí)間序列具有混沌特性,并重構(gòu)序列相空間。最后,將相空間每1維特征向量作為LSTM的時(shí)間步輸入網(wǎng)絡(luò)進(jìn)行訓(xùn)練。本文方法將預(yù)測(cè)結(jié)果的均方根誤差(root mean square error,RMSE)與平均絕對(duì)值百分比(mean absolute percentage error,MAPE)與常用的 LSTM 和 LSTM+卷積神經(jīng)網(wǎng)絡(luò)(convolutional neural networks,CNN)的方法,以及文獻(xiàn)[6,10]提及的方法相比較,希翼通過著重對(duì)GPS高程時(shí)間序列特性進(jìn)行分析,可彌補(bǔ)簡單應(yīng)用神經(jīng)網(wǎng)絡(luò)可解釋性較差的缺點(diǎn),對(duì)于時(shí)間序列變化趨勢(shì)的預(yù)測(cè)會(huì)更為顯著與準(zhǔn)確,以用于GPS高程時(shí)間序列的趨勢(shì)預(yù)測(cè)或補(bǔ)全工作。
1 GPS高程時(shí)間序列預(yù)測(cè)方法
本文預(yù)測(cè)方法的網(wǎng)絡(luò)結(jié)構(gòu)如圖1所示,主要由時(shí)間序列降噪、混沌特性分析,以及LSTM預(yù)測(cè)網(wǎng)絡(luò)幾部分組成。其中,實(shí)驗(yàn)數(shù)據(jù)來源于國際全球衛(wèi)星導(dǎo)航定位系統(tǒng)服務(wù)組織(The International Global Navigation Satellite Systems(GNSS) Service,IGS)基準(zhǔn)站上海佘山站(SHAO)的2 380 d站心坐標(biāo)系高程數(shù)據(jù),將其作為原始時(shí)間序列。
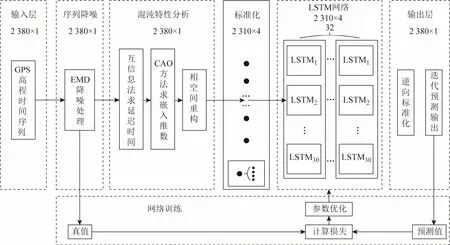
圖1 GPS高程時(shí)間序列預(yù)測(cè)模型
1.1 序列降噪
EMD方法是1種數(shù)據(jù)驅(qū)動(dòng)的降噪方法,認(rèn)為瞬時(shí)頻率如果有意義,函數(shù)必須是對(duì)稱的,局部均值為零,并且具有相同的過零點(diǎn)和極值點(diǎn),由此可將原始時(shí)間序列分解為若干個(gè)包含不同時(shí)間尺度的本征模函數(shù)(intrinsic mode function,IMF),如圖2所示。其中包括高頻噪聲項(xiàng)、周期項(xiàng)、以及趨勢(shì)項(xiàng)等[17-18],再通過計(jì)算各IMF與原序列的相關(guān)性重構(gòu)降噪后的時(shí)間序列,去除高頻噪聲,各IMF與原始時(shí)間序列的相關(guān)系數(shù)如表1所示,實(shí)現(xiàn)對(duì)GPS時(shí)間序列的降噪后,得到的序列尺寸應(yīng)為2 380×1,即降噪后時(shí)間序列共有2 380 d數(shù)據(jù),每1天數(shù)據(jù)包含1個(gè)特征維度。
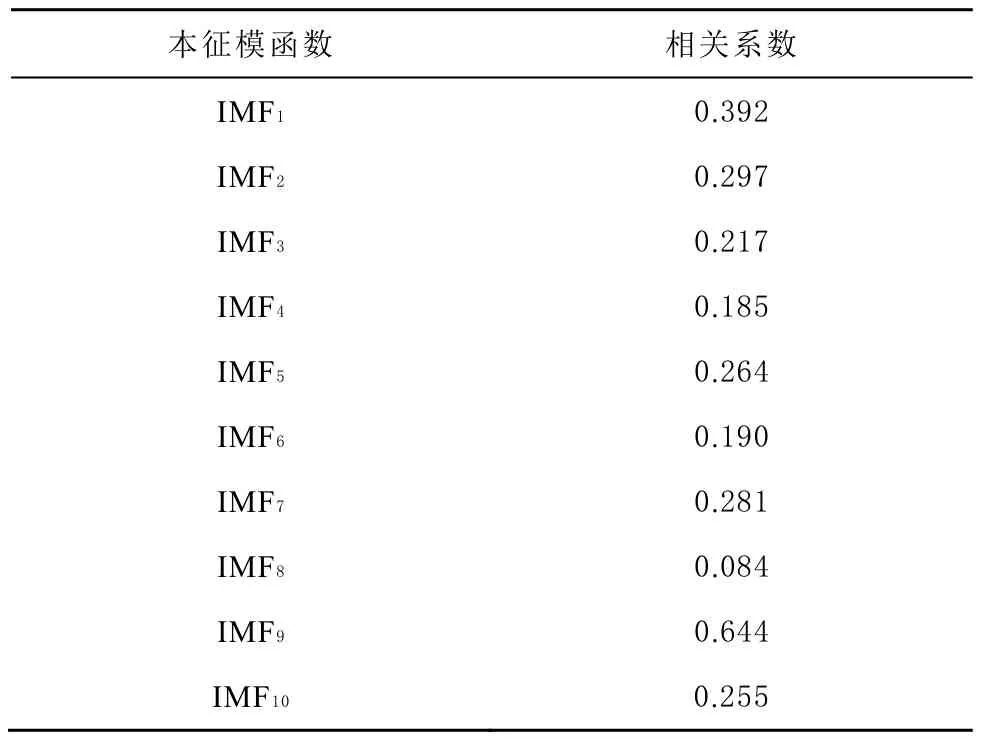
表1 各本征模函數(shù)與原序列的相關(guān)系數(shù)
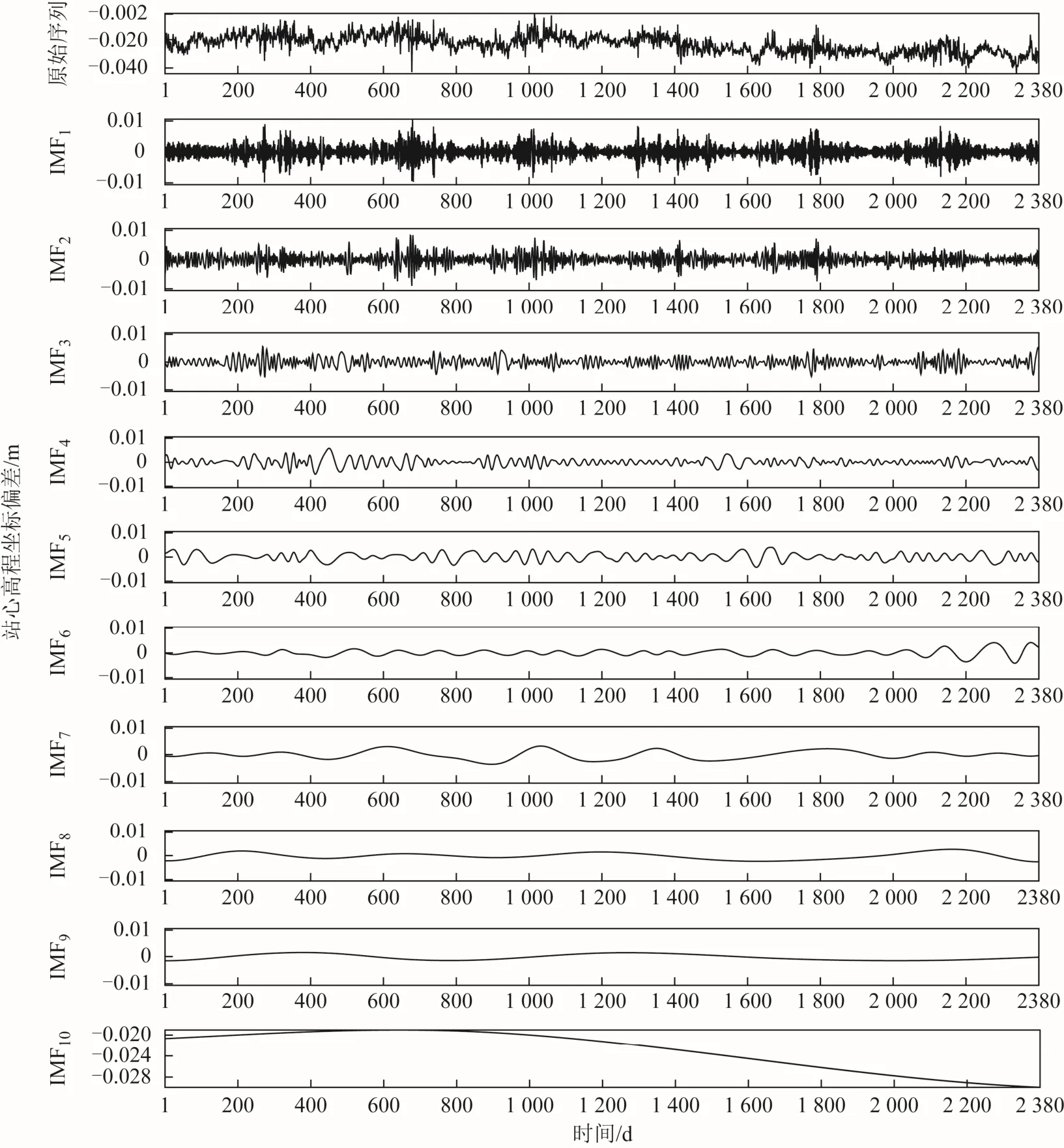
圖2 原始時(shí)間序列與經(jīng)EMD分解后的各本征模函數(shù)
由圖2可知,原始時(shí)間序列經(jīng)EMD分解得到 了10個(gè)不同時(shí)間尺度的本征模函數(shù),頻率依次降低,其中IMF10頻率最低且具有明顯的趨勢(shì)項(xiàng)特征。而由表1可知第1個(gè)相關(guān)系數(shù)極小值對(duì)應(yīng)的IMF為IMF4,說明此時(shí)IMF序列與原序列相關(guān)性最低,可知IMF1~IMF4代表了高頻噪聲[17-18];所以將它們歸為噪聲序列,IMF5~IMF10則重構(gòu)為降噪后時(shí)間序列,序列降噪前后對(duì)比如圖3所示。
由圖3可知,降噪后的時(shí)間序列較好地保留了它的周期項(xiàng)特征與趨勢(shì)項(xiàng)特征,時(shí)間序列的變化情況更為清晰。
1.2 混沌特性分析
降噪后的時(shí)間序列仍為1維的時(shí)間序列,此時(shí)序列的特征并不明顯,需要對(duì)序列進(jìn)行合適的采樣,拓展特征維數(shù),故采用互信息法求取合適的延遲時(shí)間,CAO方法求取嵌入維數(shù),最終得到李雅普諾夫指數(shù),驗(yàn)證序列具有混沌特性并將降噪后的時(shí)間序列重構(gòu)為包含 4個(gè)維度特征的多特征時(shí)間序列,重構(gòu)后的序列尺寸應(yīng)為2 340×4,即重構(gòu)后的序列包含2 340 d數(shù)據(jù),每1天的數(shù)據(jù)包含4個(gè)特征維度。
1)延遲時(shí)間的求取。互信息法是1種成熟的確定延遲時(shí)間的方法,它能夠描述序列具有的非線性特征,最大化時(shí)間序列包含的信息量,其計(jì)算公式可表示為

式中:E(τ)表示時(shí)間序列平均信息熵;pi與 pj分別表示時(shí)間序列在區(qū)間i、j內(nèi)的概率;pij(τ)為其聯(lián)合概率;τ為延遲時(shí)間。由式(1)可知,隨著τ的增大,時(shí)間序列 x(t)與 x(t+τ)的 E(τ)會(huì)逐漸降低,直到某個(gè)臨界點(diǎn),它們將不再關(guān)聯(lián),而這個(gè)臨界點(diǎn)通常取第1個(gè)極小值點(diǎn)。針對(duì)降噪后序列應(yīng)用互信息法求得的不同延遲時(shí)間下的平均信息熵如圖 4所示。
由圖 4可知,平均信息熵在延遲時(shí)間為 14 d的時(shí)候,達(dá)到第1個(gè)極小值,說明此時(shí)序列片段間關(guān)聯(lián)性達(dá)到最低,故選擇延遲時(shí)間為14 d。
2)嵌入維數(shù)的求取。CAO方法求取嵌入維數(shù),能夠使重構(gòu)后的時(shí)間序列相空間不存在信息折疊,在混沌時(shí)間序列分析時(shí)廣泛使用[19],算法步驟如下:
步驟1:從較小的嵌入維數(shù)m開始,分別重構(gòu)出m維與m+1維的相空間,計(jì)算相空間中鄰近點(diǎn)對(duì)間的歐式距離比值(),rim,可表示為

步驟3:計(jì)算E(m)與E(m+1)的變化比Em,可表示為

步驟4:重復(fù)步驟1~步驟3直到Em穩(wěn)定。
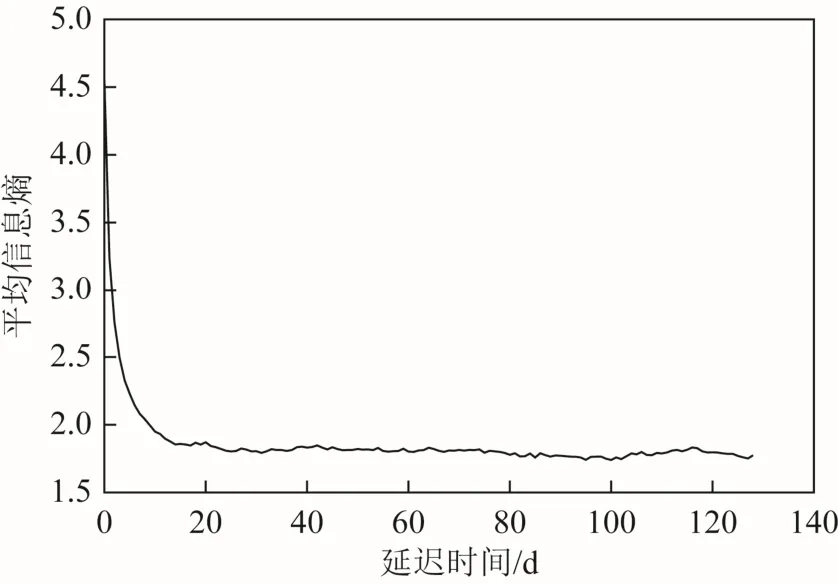
圖4 不同延遲時(shí)間下的平均信息熵
若序列存在混沌特性,那么當(dāng) m增加到某個(gè)值時(shí),Em會(huì)收斂于1,表明此時(shí)時(shí)間序列的吸引子在相空間已完全打開,嵌入維數(shù)的增加不會(huì)再使特征序列包含的信息量變多,所以將 m+1作為嵌入維數(shù)最合適,根據(jù)CAO方法求得的各維數(shù)下Em的變化情況如圖5所示。
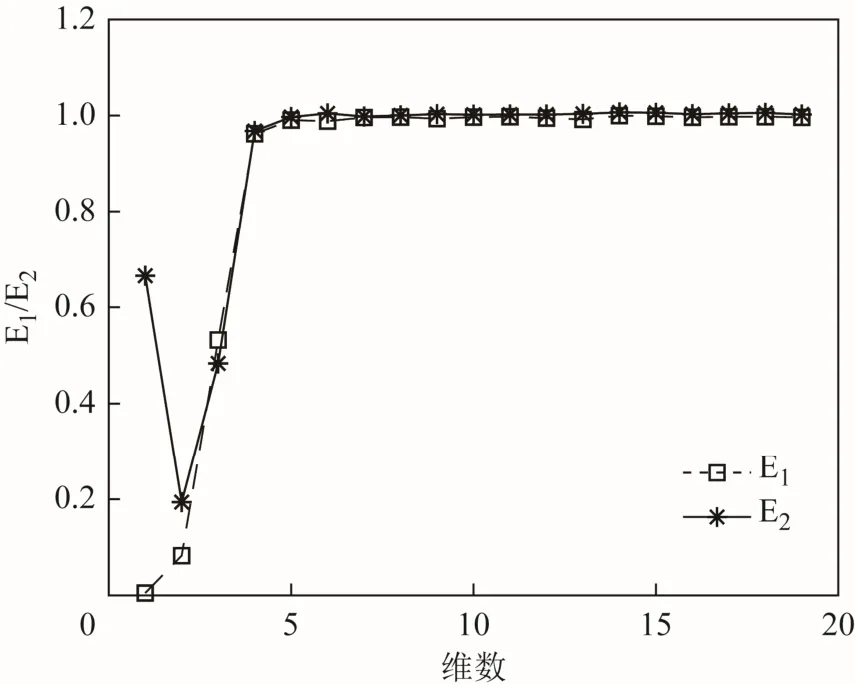
圖5 最小嵌入維數(shù)
由圖5可知,維數(shù)達(dá)到4以后,變化比在小范圍內(nèi)逐漸穩(wěn)定,可以認(rèn)為在該維度上重構(gòu)時(shí)間序列能夠很好地展開11維時(shí)間序列,近似反映原系統(tǒng)相空間的變化規(guī)律,因此嵌入維數(shù)選擇為4。
3)GPS時(shí)間序列的混沌性判別。混沌性判別是混沌時(shí)間序列相空間重構(gòu)的可行性保證,常用方法是通過求取延遲時(shí)間和嵌入維數(shù)來確定最大李雅普諾夫指數(shù),進(jìn)而判斷時(shí)間序列是否具有混沌特性。
李雅普諾夫指數(shù)反映了混沌吸引子中鄰近軌道的分離速度,而最大李雅普諾夫指數(shù)決定了相空間相鄰軌道是否穩(wěn)定,若其大于 0,則序列變化會(huì)以指數(shù)增長,直到無法預(yù)測(cè)。根據(jù)求得的延遲時(shí)間與嵌入維數(shù)計(jì)算李雅普諾夫指數(shù),具體步驟如下:
步驟 1:對(duì)降噪時(shí)間序列做快速傅里葉變換,并通過周期-功率譜圖估算序列平均周期;
步驟2:利用延遲時(shí)間τ,嵌入維數(shù)m重構(gòu)時(shí)間序列,序列x(n)經(jīng)過重構(gòu)后可表示為
式中: xn?m+1表示重構(gòu)后的第 n-m+1維時(shí)間序列;x(n ?m+1)表示原始序列第n-m+1個(gè)值。
步驟3:找到每個(gè)點(diǎn) x (t)的最近鄰點(diǎn)x(t?),同時(shí)限制短暫分離,計(jì)算鄰近點(diǎn)對(duì)的距離初值 xt(0),可表示為

式中:p 為平均周期;t=1,2,…,n-m+1。
步驟 4:計(jì)算每個(gè)點(diǎn)χ(t)在 i個(gè)延遲后相應(yīng)鄰近點(diǎn)對(duì)的距離χt(i),即
式中:t?=1,2,… ,m,且 t≠t?;i=1,2,… ,min(m-t,m-t?)。對(duì)每個(gè) i求取所有 t的χt(i),并求其平均χ(i),在χ(i)與i有線性關(guān)系的區(qū)域用最小二乘法擬合直線,該直線斜率即為最大李雅普諾夫指數(shù)。
根據(jù)上述步驟求取時(shí)間序列的平均周期,時(shí)間序列周期功率譜如圖6所示。
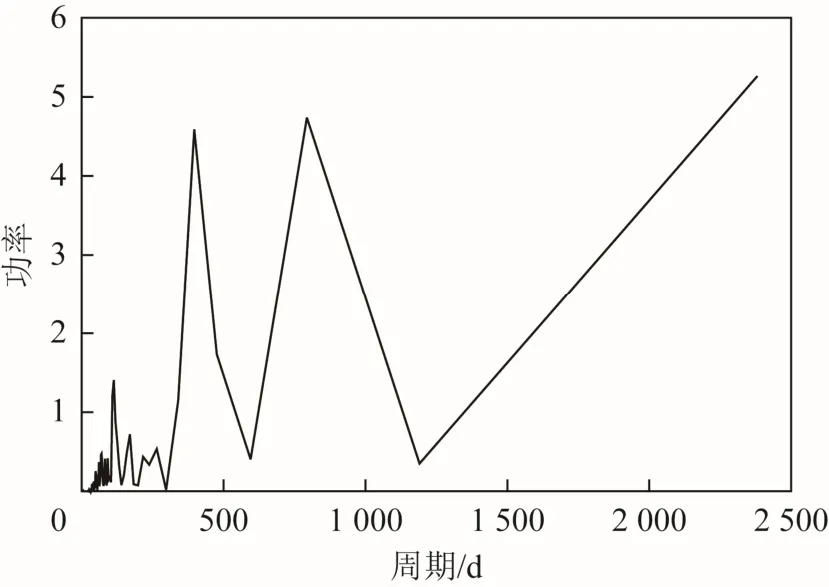
圖6 周期功率譜(即序列長度時(shí))
由圖6可知,序列周期圖為2 380 d時(shí),功率達(dá)到最大點(diǎn),其次為平均周期取793 d時(shí),故取793 d為序列平均周期,結(jié)合延遲時(shí)間與嵌入維數(shù)求取最大李雅普諾夫指數(shù)的結(jié)果如圖7所示。
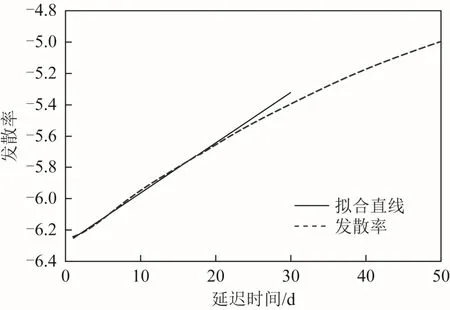
圖7 時(shí)間序列最大李雅普諾夫指數(shù)
根據(jù)圖7可知,實(shí)線為擬合的直線,其斜率為0.033 4,即最大李雅普諾夫指數(shù)大于0,證明實(shí)驗(yàn)所用高程時(shí)間序列具有混沌特性,可以采用混沌理論重構(gòu)GPS高程時(shí)間序列相空間并進(jìn)行預(yù)測(cè)。
1.3 LSTM預(yù)測(cè)模型
LSTM是1種特殊的循環(huán)神經(jīng)網(wǎng)絡(luò),有著與循環(huán)神經(jīng)網(wǎng)絡(luò)相似的單元結(jié)構(gòu),能夠通過前向與反饋傳播有效記憶時(shí)間序列時(shí)間節(jié)點(diǎn)間的變化特征。除此之外,LSTM增加了遺忘門、輸入門和輸出門。其中遺忘門能夠限制上一時(shí)間節(jié)點(diǎn)輸出的信息量,輸入門可以選擇性地獲取新的輸入信息,輸出門則能根據(jù)新輸入的信息與上一時(shí)刻輸出的信息計(jì)算出當(dāng)前時(shí)刻的輸出;3個(gè)門結(jié)構(gòu)相互作用,通過反復(fù)訓(xùn)練獲得網(wǎng)絡(luò)權(quán)值,它能夠充分學(xué)習(xí)到不同時(shí)間步之間短期或長期的時(shí)間特征。
為加快網(wǎng)絡(luò)權(quán)值的收斂,故先對(duì)重構(gòu)的時(shí)間序列進(jìn)行數(shù)據(jù)標(biāo)準(zhǔn)化處理,再輸入 LSTM預(yù)測(cè)模型進(jìn)行學(xué)習(xí),并計(jì)算網(wǎng)絡(luò)輸出的迭代預(yù)測(cè)值與真值的損失(loss),使用 ADAM(adaptive moment estimation)方法對(duì)網(wǎng)絡(luò)權(quán)重值不斷優(yōu)化改正,最終得到預(yù)測(cè)模型。
1.4 評(píng)價(jià)指標(biāo)
預(yù)測(cè)結(jié)果的評(píng)價(jià)指標(biāo)采用 RMSE和 MAPE,其中:RMSE對(duì)異常點(diǎn)較敏感,本文用它刻畫真實(shí)值與預(yù)測(cè)值的偏差,當(dāng)預(yù)測(cè)時(shí)出現(xiàn)的不合理點(diǎn)越少,RMSE也會(huì)越小;MAPE則考慮了誤差與真實(shí)值之間的比例,用它來反映預(yù)測(cè)值與真實(shí)值的相對(duì)誤差,它們的計(jì)算公式可分別表示為
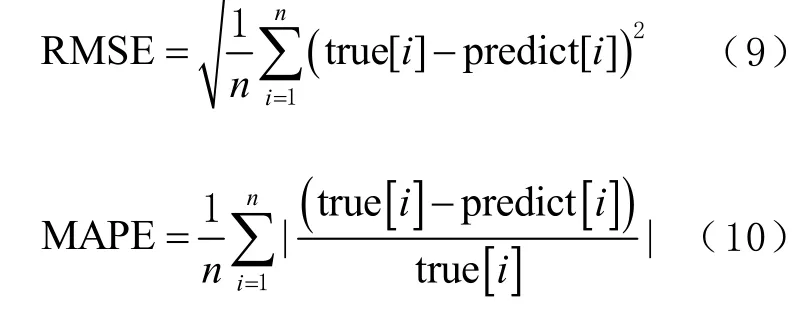
式中:n 為序列長度;true[i]與 predict[i]分別代表序列第i個(gè)真實(shí)值和預(yù)測(cè)值。
本文還將預(yù)測(cè)點(diǎn)與真實(shí)值的趨勢(shì)擬合情況作為評(píng)價(jià)指標(biāo)之一,并且分析了本文方法應(yīng)用在其他站點(diǎn)數(shù)據(jù)上的泛化能力。
2 實(shí)驗(yàn)與結(jié)果分析
本文的實(shí)驗(yàn)數(shù)據(jù)來源于中國地震局全球衛(wèi)星導(dǎo)航定位系統(tǒng)(global navigation satellite systems,GNSS)數(shù)據(jù)產(chǎn)品服務(wù)平臺(tái),共設(shè)計(jì)了2組實(shí)驗(yàn)用于驗(yàn)證本文提出的預(yù)測(cè)模型的有效性。第1組實(shí)驗(yàn)基于IGS基準(zhǔn)站上海佘山站(SHAO)的2 380 d站心坐標(biāo)系高程數(shù)據(jù),對(duì)比方法為目前常用的LSTM和 LSTM+CNN方法、文獻(xiàn)[6]和文獻(xiàn)[10]使用的變分模態(tài)分解(variational mode decomposition,VMD)以及廣義回歸神經(jīng)網(wǎng)絡(luò)(generalized regression neural network,GRNN)的預(yù)測(cè)方法。第 2 組實(shí)驗(yàn)針對(duì)SHAO、武漢站(WUHN)、拉薩站(LHAS)、新疆鄯善站(XJSS)和北京房山站(BJFS)等5個(gè)不同區(qū)域站點(diǎn)的各2 380 d站心坐標(biāo)系高程數(shù)據(jù),分別使用不同方法進(jìn)行預(yù)測(cè)實(shí)驗(yàn),旨在驗(yàn)證本文預(yù)測(cè)模型的泛化能力。實(shí)驗(yàn)中數(shù)據(jù)預(yù)處理以及混沌特性分析部分的實(shí)驗(yàn)是基于MATLAB2014完成的,預(yù)測(cè)模型的搭建與實(shí)驗(yàn)是基于 Python3.7與Tensorflow1.9完成的。
2.1 預(yù)測(cè)模型的訓(xùn)練
綜合前文的分析,結(jié)合圖1可知,重構(gòu)后的時(shí)間序列共有2 340 d,每1天的數(shù)據(jù)有4個(gè)維度,實(shí)驗(yàn)選取了前2 310 d數(shù)據(jù)作為訓(xùn)練數(shù)據(jù),剩余部分作為測(cè)試數(shù)據(jù),并且通過網(wǎng)格搜索法選取預(yù)測(cè)模型超參數(shù),最終選定隱層數(shù)量為32層,每1隱層中的LSTM神經(jīng)元為30個(gè),訓(xùn)練輪數(shù)為500輪,學(xué)習(xí)率為0.001,批尺寸為64個(gè)。模型的輸入為重構(gòu)后序列的第1~2 309 d數(shù)據(jù),與之對(duì)應(yīng)的輸出標(biāo)簽為原始時(shí)間序列中第2~2 310 d數(shù)據(jù),訓(xùn)練過程中各方法的損失函數(shù)收斂情況如圖8所示。
由圖8可知,在訓(xùn)練集上,所有方法的loss收斂都很快。其中LSTM方法的loss最大,收斂后有一定的波動(dòng),LSTM+CNN的loss較之更低,且較穩(wěn)定。本文方法與文獻(xiàn)[10]方法的 loss大小明顯小于前 2種方法,說明在訓(xùn)練集上更容易學(xué)到序列的變化模式,效果優(yōu)于前2種方法;不同在于本文方法loss波動(dòng)較大,但總體看來 loss略低于文獻(xiàn)[10]的方法,說明本文方法在訓(xùn)練集上表現(xiàn)最優(yōu),同時(shí)也印證了模型超參數(shù)的選擇是較為合理的。
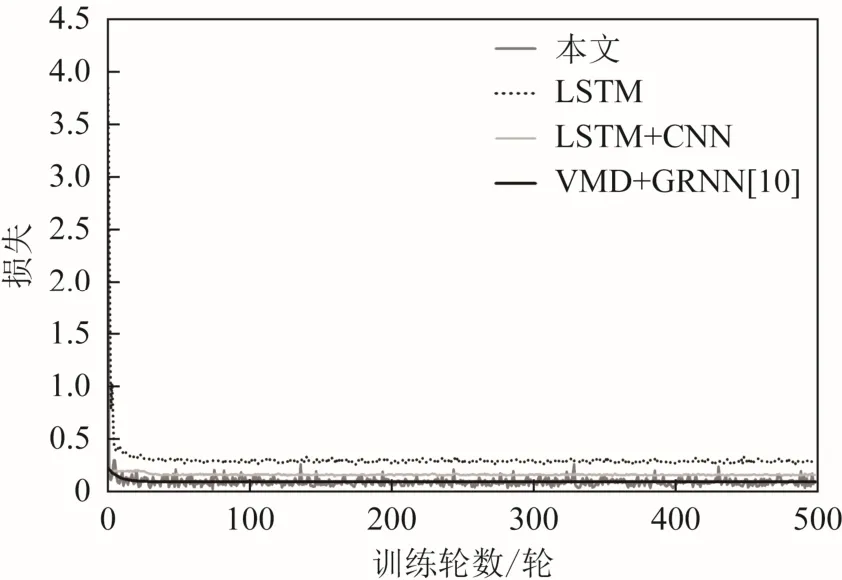
圖8 損失函數(shù)收斂
2.2 SHAO站預(yù)測(cè)結(jié)果對(duì)比
考慮到迭代預(yù)測(cè)的結(jié)果存在一定的不確定性,所以本文基于4種方法分別訓(xùn)練了20次模型,并分別統(tǒng)計(jì)了預(yù)測(cè)結(jié)果的評(píng)價(jià)指標(biāo),見圖9、圖10,各方法最優(yōu)結(jié)果的評(píng)價(jià)指標(biāo)如表2所示。
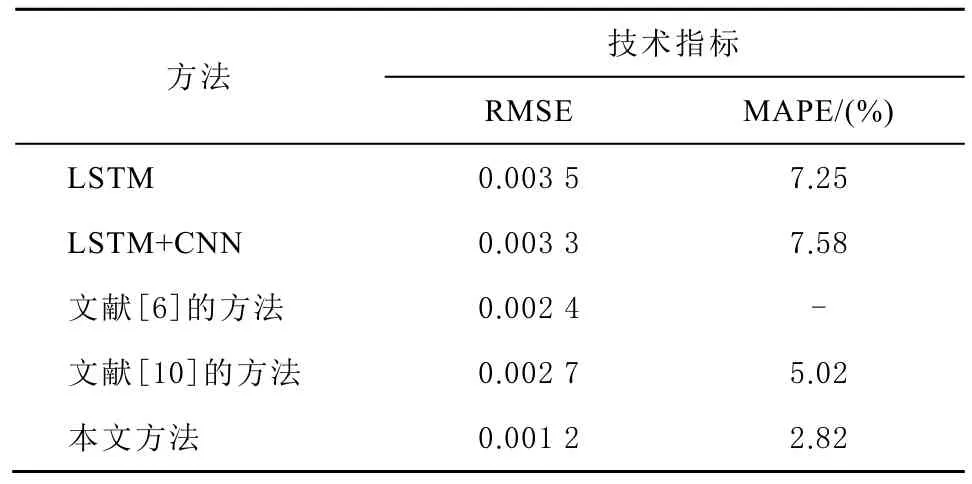
表2 各方法評(píng)價(jià)指標(biāo)對(duì)比
綜合圖9、圖10與表2可知,所有方法的預(yù)測(cè)結(jié)果都在一定的范圍內(nèi)浮動(dòng),是相對(duì)穩(wěn)定的。其中,文獻(xiàn)[6]由于通過 Lag Feature方式重構(gòu)時(shí)間序列,并進(jìn)行了網(wǎng)絡(luò)超參數(shù)優(yōu)選,因此 RMSE相較前2種方法有明顯提高。文獻(xiàn)[10]則結(jié)合了混沌理論重構(gòu)的多特征時(shí)間序列和 GRNN方法,同時(shí)提高了RMSE和MAPE,說明了多特征預(yù)測(cè)的有效性。本文方法同樣利用混沌理論構(gòu)建多特征,但采用了 LSTM進(jìn)行預(yù)測(cè):得到的 MAPE為2.82 %,說明預(yù)測(cè)值與真值相對(duì)誤差小;而RMSE僅為0.001 2,說明預(yù)測(cè)結(jié)果中異常點(diǎn)較少,其對(duì)應(yīng)的觀測(cè)值物理意義為站心坐標(biāo)預(yù)測(cè)值與真值間的平均誤差為 1.2 mm,這能夠滿足 GPS靜態(tài)數(shù)據(jù)后處理的精度要求、在所列方法中,預(yù)測(cè)效果為最佳。各方法對(duì) SHAO站 30 d最佳的滾動(dòng)預(yù)測(cè)效果圖見圖11。
由圖 11可知:LSTM方法和 LSTM+CNN方法預(yù)測(cè)點(diǎn)擬合的整體趨勢(shì)較為平緩,對(duì)于序列的局部變化難以及時(shí)做出調(diào)整進(jìn)行預(yù)測(cè);而文獻(xiàn)[10]和本文方法由于使用了多特征,使得預(yù)測(cè)結(jié)果對(duì)于單調(diào)性以及凹凸性發(fā)生變化的點(diǎn)更為敏感,預(yù)測(cè)的趨勢(shì)更為準(zhǔn)確。這也說明了為什么本文方法在訓(xùn)練時(shí),雖然誤差總體較小,但波動(dòng)較大。
2.3 模型的泛化能力分析
為說明本文提出的預(yù)測(cè)方法具有較好的泛化能力,本文針對(duì)WUHN站、LHAS站、BJFS站、XJSS站分別做了4種方法的預(yù)測(cè)實(shí)驗(yàn),預(yù)測(cè)效果如圖12所示。
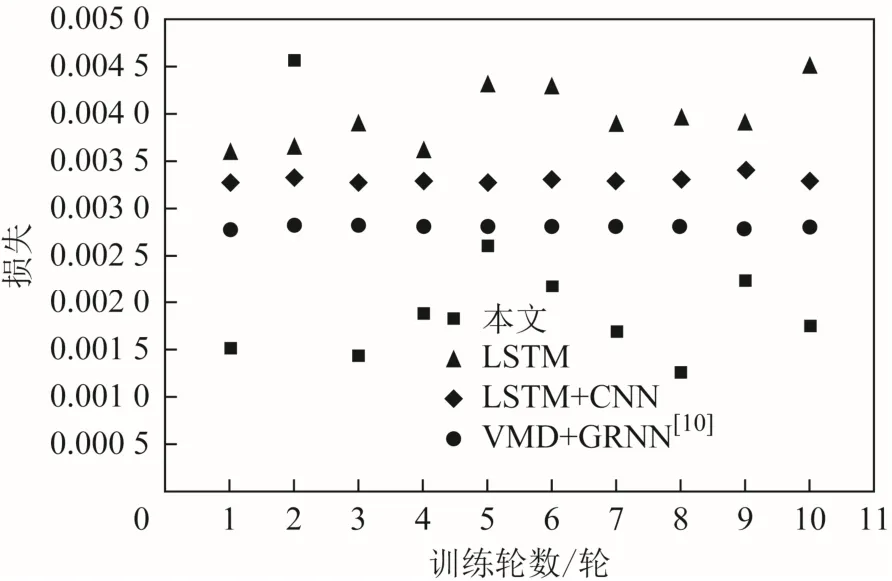
圖9 均方根誤差(RMSE)對(duì)比
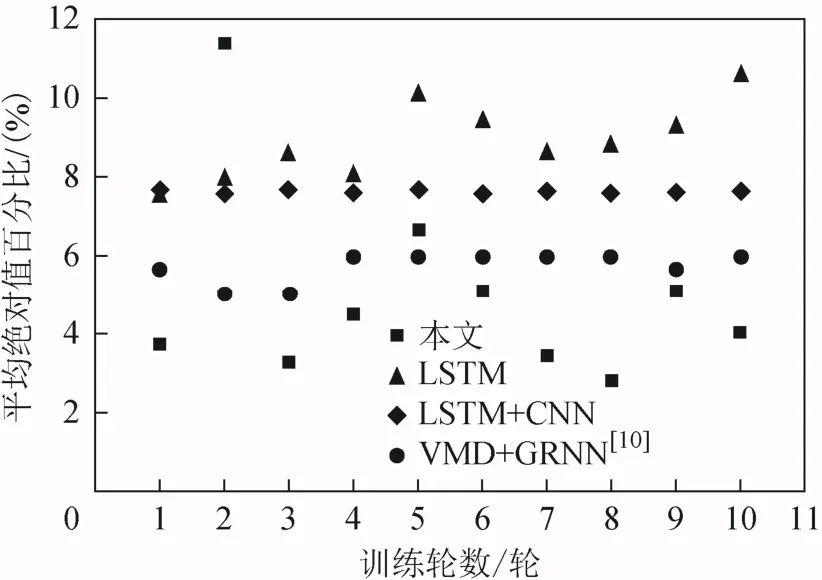
圖10 平均絕對(duì)值百分比(MAPE)對(duì)比圖
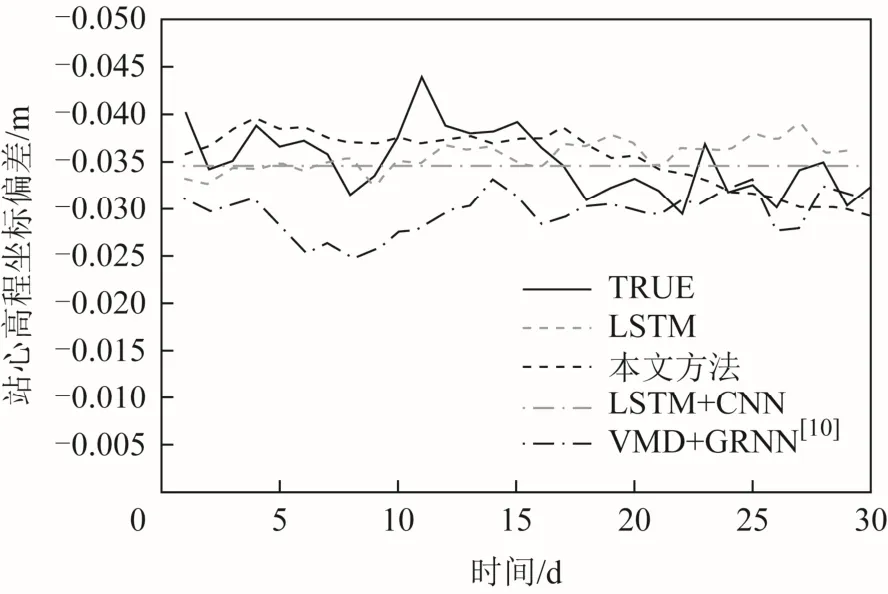
圖 11 SHAO 站 30 d 預(yù)測(cè)效果
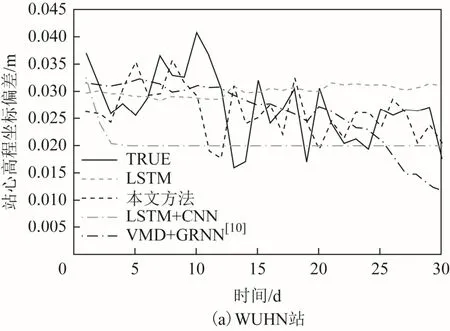

圖12 各站30 d的預(yù)測(cè)效果圖
由圖12可知,針對(duì)不同地區(qū)的高程觀測(cè)數(shù)據(jù),各站點(diǎn)的預(yù)測(cè)結(jié)果與 SHAO站大致相同,LSTM、LSTM+CNN的預(yù)測(cè)測(cè)結(jié)果較為平緩,能夠反映一定的整體趨勢(shì),而本文的方法不僅能準(zhǔn)確反映序列整體的變化趨勢(shì),局部點(diǎn)的變化趨勢(shì)也更為顯著,說明該預(yù)測(cè)模型具有一定的泛化能力,同時(shí)也說明了混沌分析,用多特征變量進(jìn)行預(yù)測(cè)以及建立混合模型的有效性。
基于上述實(shí)驗(yàn)結(jié)果,可以得出以下結(jié)論:
1)單變量特征的預(yù)測(cè)方法在精度和預(yù)測(cè)曲線形態(tài)的擬合上要略差于多變量特征預(yù)測(cè)方法;
2)基于混沌理論將單一維度時(shí)間序列重構(gòu)為多特征時(shí)間序列,是1種有效的拓展或恢復(fù)特征的方法,能夠有效提高預(yù)測(cè)的效果;
3)結(jié)合對(duì)時(shí)間序列自身特性分析與預(yù)測(cè)模型的混合模型預(yù)測(cè)方法要優(yōu)于某一預(yù)測(cè)網(wǎng)絡(luò)模型的簡單應(yīng)用。
3 結(jié)束語
針對(duì)GPS高程時(shí)間序列的特點(diǎn),將混沌理論與LSTM相結(jié)合,本文提出了1種新的混合預(yù)測(cè)模型。首先對(duì)時(shí)間序列進(jìn)行EMD降噪,去除白噪聲等無關(guān)信息;然后驗(yàn)證了GPS高程時(shí)間序列具有混沌特性;并將1維時(shí)間序列在高維展開,增加了特征維度,最大化序列包含信息;再作為LSTM的時(shí)間步輸入模型進(jìn)行訓(xùn)練。通過 2組實(shí)驗(yàn)數(shù)據(jù)計(jì)算結(jié)果表明,本文方法的預(yù)測(cè)結(jié)果中,RMSE最低可達(dá) 0.001 2,而 MAPE僅為2.9 %,能夠滿足GPS后處理的精度要求,提高了對(duì)高程時(shí)間序列的預(yù)測(cè)精度以及變化趨勢(shì)的準(zhǔn)確性,同時(shí)具有一定的泛化能力,是深度學(xué)習(xí)在GPS數(shù)據(jù)分析領(lǐng)域的 1次應(yīng)用,可用于今后的實(shí)際工程中的預(yù)測(cè)或補(bǔ)全應(yīng)用。接下來的研究方向會(huì)針對(duì)訓(xùn)練時(shí)不穩(wěn)定的現(xiàn)象進(jìn)行模型改進(jìn),同時(shí)探索深度學(xué)習(xí)在GPS領(lǐng)域的其他應(yīng)用。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當(dāng)代陜西(2019年10期)2019-06-03 10:12:04
數(shù)學(xué)小靈通·3-4年級(jí)(2017年9期)2017-10-13 08:10:54
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56