SLR系統時延精確標校實現及分析
2020-03-06 05:36:36張浩越趙春梅衛志斌
導航定位學報 2020年1期
張浩越 ,趙春梅 ,瞿 鋒 ,衛志斌
0 引言
衛星激光測距(satellite laser ranging,SLR)技術是通過測量激光脈沖往返于地面站與衛星的飛行時間,進而獲取目標高精度距離信息。SLR技術單次測量精度最高已達毫米級[1],被公認為衛星測量手段中精度最高的技術,是全球地球參考框架建立和維護、衛星精密定軌、地球自轉參數確定、全球范圍高精度時間比對等方面的重要技術手段[2-6]。近年隨著全球大地測量觀測系統(global geodetic observing system,GGOS)網絡的推動建立,國際大地測量協會對于SLR數據質量提出更高要求:內符精度需達毫米級、外符精度需達到亞毫米/年水平[7]。SLR數據外符精度是指衛星與測站距離的測量值與真實值之間的偏差,主要取決于系統時延標校的精度,而系統時延是隨著時間和環境氣象參數的變化而改變的[8];因此為了獲得高精度的系統時延改正,一般需要在每次觀測前后各進行1組地靶測量,以保證觀測數據精度[7]。
地靶測量作為SLR系統時延標校的重要手段,地靶測量的數值精度和穩定直接影響 SLR的數據質量。在地靶測量中,通過發射激光到固定距離外的地面目標并接收回波信號,通過測量發射、回波信號間的時間差計算系統時延[8]。由于接收回波信號的探測器存在時間游動效應[9],為減小時間游動效應所帶來的時延誤差,需要衰減激光能量。激光的衰減方式一般分為 3類。分別是采用光學衰減片、棱鏡以及偏振片[10]。目前地靶測量大多采用中性光學吸收片進行激光衰減,但是由于中性吸收片的厚度較厚,特別是中性吸收片的數量、擺放角度因人而異,會影響地靶測量的準確性,進而影響SLR數據質量[11]。本研究采用反射式光學衰減片,通過時延標校理論,從單位時間內接收平均光子數角度,分析衰減片角度與測距精度的關系,進而滿足提高SLR數據質量的目的。
1 SLR系統時延標校方法及方案
1.1 SLR系統時延標校方法
根據激光測距雷達方程,單位時間內接收到的平均光子數ηpe可以表示為

式中:ηq為光探測器的量子效率;ET為激光器發出的單脈沖激光能量;λ為激光脈沖波長;h為普蘭克常量;c為真空光速;ηt為激光發射光學系統的效率;Gt為激光發射系統增益;σ為衛星角反射器的反射截面積;R為測站到衛星之間的斜距; Ar為接收望遠鏡的有效面積;ηr為接收望遠鏡光學系統的接收效率;Tα單程大氣透過率。
由式(1)得,激光能量越強,單位時間內接收到的平均光子數ηpe就越多。方程中回波光子指的是 1個單位時間內的平均量,其在光電接收器件被探測到的事件是非必然事件,服從偶然事件的統計規律。
單光子雪崩二極管被廣泛應用于激光測距系統中。基于此的漫反射單程測量外符精度Rao[12]可表示為

式中:td為該段區域內所對應的被觸發的時刻期望值;Γd為目標在距離門控內的位置。
由方差與期望的關系式D(X ) = E(X2)?(E(X ))2可推出單程測距精度Rpo為
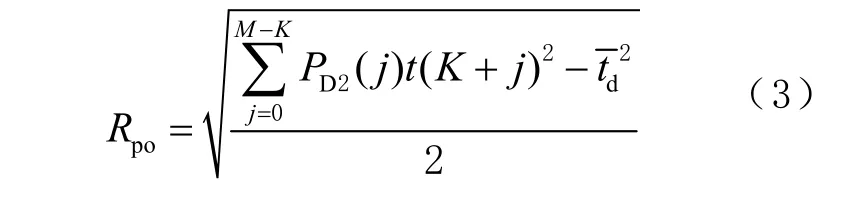
式中: t(K + j)為第K + j 個時隙所對應的時刻中值;td該段區域內所對應的被觸發的時刻期望值;PD2(j)為區域內的各時隙探測概率歸一化結果。
在SLR系統中,式(1)常用來估算回波信號強度。由式(1)~式(3)得,在相同脈寬情況下,隨著激光能量增強,單位時間內接收到的平均光子數ηpe增多,回波強度增強,測距精度提高。
在衛星激光測距領域中,從單位時間內接收到的平均光子數的角度來看,SLR測距需要足夠的信噪比。而噪聲存在于任何探測系統,是探測性能的主要限制因素。噪聲的來源主要有2種:1種是探測器內部的固有噪聲,即暗噪聲;另1種是背景噪聲。暗噪聲無法排除,只有設法減少背景噪聲[13-16]。
背景噪聲估算公式為

式中:ΝB為接收探測器接收到的背景噪聲平均光電子數;Nλ為背景亮度;Δλ為干涉濾光片帶寬;Kr為接收光學系統的效率; Ar為接收望遠鏡的有效透過波段有效面積;θr為接收視場角;η為接收探測器的量子效率。
根據式(4),夜間觀測時,晴朗無月的夜空條件下背景噪聲很小,可以采用帶寬為2~5 nm的干涉濾光片,甚至可以不采用光譜濾波的方法。而若考慮干涉濾光片,同樣條件下白天測距的背景噪聲是夜間的 100萬倍以上。依據噪聲信號功率關系,夜間千赫茲重復頻率衛星激光測距系統基本上不能在白天工作,必須進行光譜濾波和時間濾波。
1.2 標校方案
光譜濾波就是采用窄帶濾光片來減小背景噪聲。白天天空背景噪聲譜寬很寬,因此在接收系統可以采用 400~900 nm的超窄帶光譜響應范圍,即譜寬約為500 nm。如果白天方案采用0.15 nm的超窄帶干涉濾光片,此時天空背景噪聲對接收系統的影響估計將減小為0.15/500,即 3 × 1 0?4。同時濾光片對中心波長也有一些影響,一般透過率僅為30 %。但相比之下,系統信噪比得到很大提高。
時間濾波是建立在距離預報的基礎上的。該濾波方法采用了距離門技術。具體而言,就是在預報回波尚未到達之前,距離門處于關閉狀態,在回波達到前的一瞬間將距離門開啟。這就有效屏蔽了回波到達前的噪聲。當不改變其他參數,距離門控時間設置在100 ns內,探測成功率將提高到35 %以上。因此在白天實驗中,距離門時間將設置為100 ns[17-19]。
為保證實驗結果穩定,方案將采用步進電機控制衰減片進出。在實驗中使用的衰減片屬于反射式衰減片,為了使反射光不能沿原路返回而損壞器件,需要限制衰減片角度[19]。激光器的輸出能量是可以通過調節激光器的電壓調節的。為評估與衰減片衰減激光能量的差異,夜間實驗分為2組,衰減前激光器能量設置為100 %和 90 %的最大功率,均采用 300 ns的距離門控。由于夜間背景噪聲很小,夜間實驗采用無窄帶濾光片方案。白天實驗也分為2組,激光能量為100 %和 90 %的最大功率,采用100 ns的距離門控和0.15 mm的窄帶濾光片。實驗方案設置如圖1所示。
2 實驗與結果分析
2.1 實驗結果
根據表1所述實驗方案,得到實驗結果如圖2所示,由實驗數據可以看出:

表1 實驗方案
1)根據圖2(b),衰減后激光能量相近,但回波率相差較大,造成測量值精度和均值波動,根據回波光子理論,回波率的升高會提高測量值精度。但是白天實驗中,精度提高不大,但是測量值減小明顯。反映了白天噪聲對單光子探測器的影響較大。白天需要更高的激光能量,提高回波率,從而達到夜間的精度和測量值。同時但其變化趨勢可以作為全功率激光數據的參考。
2)根據圖 2(a)、圖 2(c)、圖 2(e)、圖 2(g),在夜間,地靶角度在30~60°之間最優。地靶測量值均值隨角度增加而增大。而在白天,高角度有著更高精度和更小的測量值均值的趨勢。
3)根據圖 2,非全功率的測量值與全功率測量值相比,測量值均值以及精度波動較大,得出激光器的狀態和性質對測量結果存在影響,所以測量值精度的提高不能單一地提高激光能量,還需要研究激光本身與測量值的關系。

圖1 衰減片放置俯視示意圖
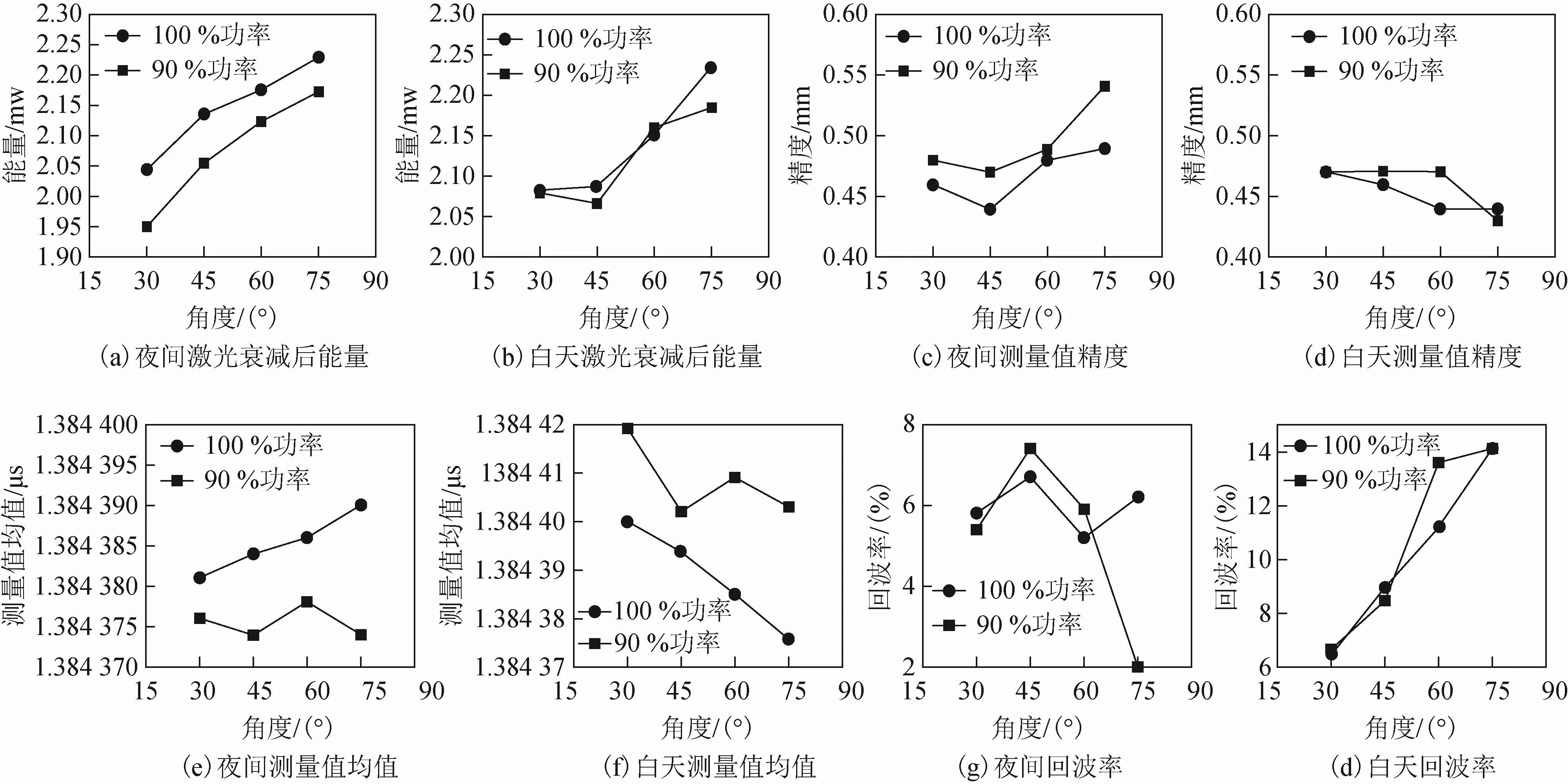
圖2 實驗結果
由于實驗條件限制,在夜間實驗中,45°衰減片的精度與其他角度放置衰減片的精度相比,精度最大提高0.7 mm。在白天實驗中,75°衰減片的精度與其他角度放置衰減片的精度相比,精度最大提高 4 mm。在夜間實驗中,采用 45°衰減片的方案,相較于其他方案,精度有所提高。在白天實驗中,75°衰減片的方案精度更高,且測量值均值更接近夜間測量值。所以夜間 45°、白天 75°的放置角度方案可以提高地靶測量精度,滿足提高SLR數據質量的目的。
2.2 SLR系統時延數據分析
北京房山站從2018年2月起,衰減片由人工變為自動控制。由圖 3得 2017年 12月最大值1.384 112,最小值 1.383 77 μs,相差 342 ps。2018 年2 月最大值 1.384 172,最小值 1.383 998 μs,相差174 ps。根據2018年2月地靶測量值分布集中的情況,反映出系統性能更穩定。其中2018年2月份測量值均值數據呈下降趨勢,原因是激光器長期使用導致的激光質量下降,所以激光器需要定期維護。根據圖4,Lageos-1衛星實測精度平均值由 2.23提高到 2.03 cm,表明該方案滿足提高SLR數據質量的目的。
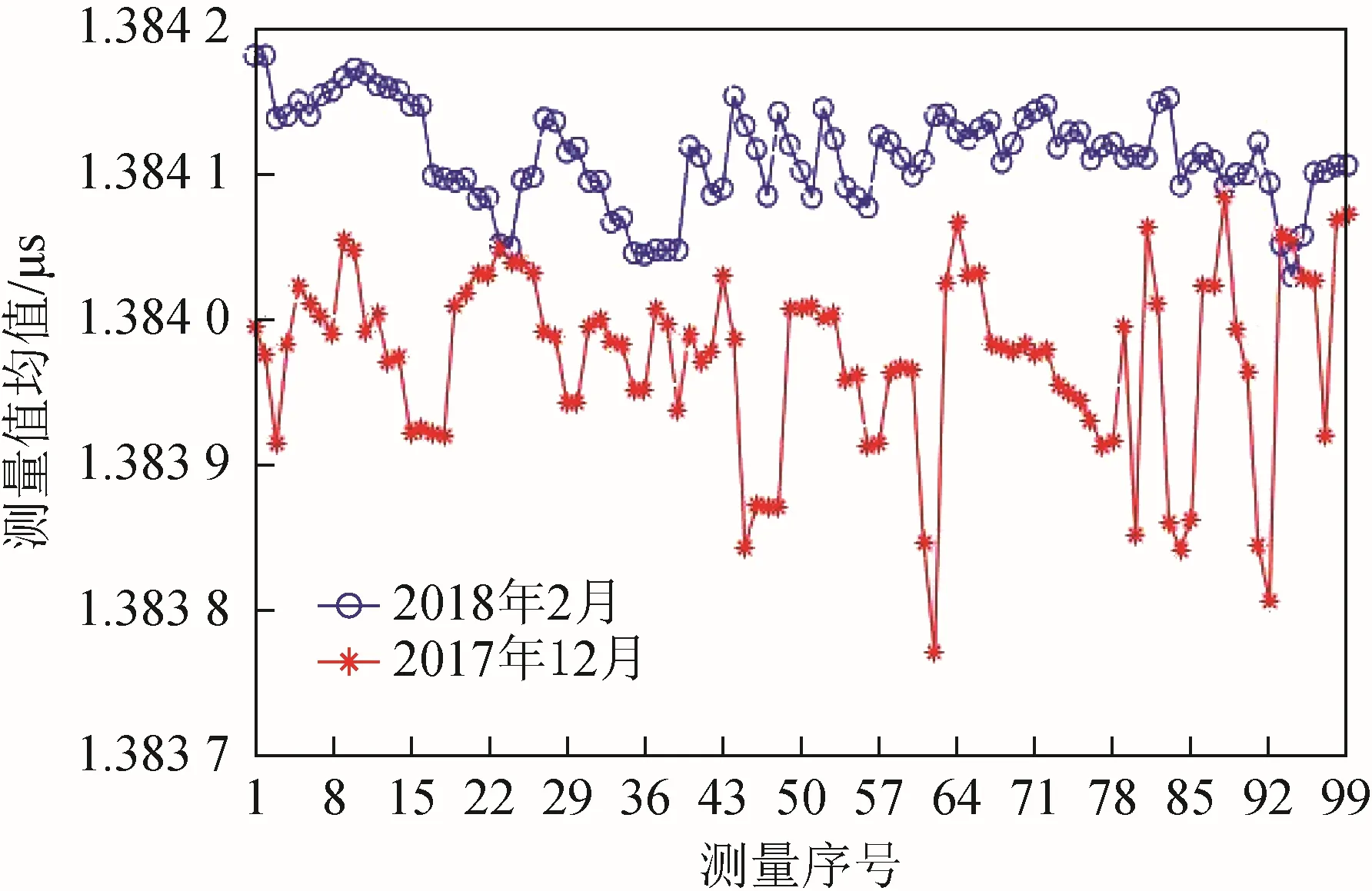
圖3 地靶測量值均值統計
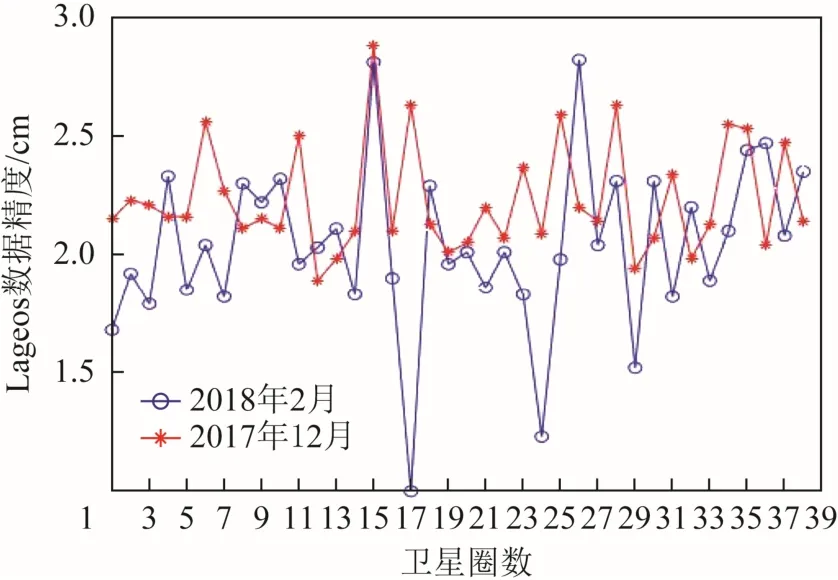
圖4 lageos-1衛星圈數統計
3 結束語
本文通過 SLR系統時延標校原理,從單位時間內接收到的平均光子數的角度分析 SLR數據質量的影響因素。包括衰減片以及單光子探測器對衛星激光測距精度的影響。為保證衰減片放置穩定,增強數據可靠性,實驗采用步進電機控制衰減片切換光路。在實驗中,通過調節激光器功率改變激光能量,得到全功率與非全功率地靶測量的差異。以及通過改變衰減片角度獲取激光能量與地靶測量的關系。結果表明,采用白天和夜間衰減片角度分別為75和45°的方案,可以提高 SLR系統延時標校精度,且滿足改善SLR數據質量的目的。后續還將采用不同方案對激光能量及性質與地靶精度及測量值之間的關系進行相關研究。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
發明與創新(2016年38期)2016-08-22 03:02:52