卵形體農(nóng)產(chǎn)品大小頭自動定向翻轉(zhuǎn)運動仿真模型建立與試驗驗證
2020-03-06 04:54:22陳琦瑩朱體操陳章耀
食品與機械 2020年1期
關(guān)鍵詞:模型
姜 松 陳琦瑩 朱體操 陳章耀
(1. 江蘇大學食品與生物工程學院,江蘇 鎮(zhèn)江 212013;2. 江蘇大學土木工程與力學學院,江蘇 鎮(zhèn)江 212013)
卵形體農(nóng)產(chǎn)品因外形具有大小頭之分的特征而得名,它在日常生活中非常普遍,常見的雞蛋、鴨蛋等禽蛋一類,牛油果、蛋黃果等水果一類均屬于卵形體農(nóng)產(chǎn)品的范疇。解決卵形體農(nóng)產(chǎn)品自動定向問題可有效減少農(nóng)產(chǎn)品自動分級和加工的誤差,自動分級裝置精度高且運動簡單,使物料調(diào)整為近似等“姿態(tài)”,有利于后續(xù)檢測工作[1]。對于最主要的卵形體農(nóng)產(chǎn)品禽蛋來說,自動定向處理可助于禽蛋提高商品價值,將蛋黃與蛋殼隔離減少污染從而延長保質(zhì)期[2]。基于分列翻轉(zhuǎn)方式的卵形體農(nóng)產(chǎn)品自動定向過程包括軸向運動和翻轉(zhuǎn)運動,其中翻轉(zhuǎn)運動是整個定向運動中最核心的環(huán)節(jié),其規(guī)律主要取決于卵形體農(nóng)產(chǎn)品的基本特征參數(shù)、定向裝置結(jié)構(gòu)參數(shù)和輸送系統(tǒng)參數(shù)的影響[3],同時這些參數(shù)也是定向裝置設(shè)計的基礎(chǔ)。關(guān)于卵形體農(nóng)產(chǎn)品翻轉(zhuǎn)運動規(guī)律的研究已比較深入,主要包括闡明了翻轉(zhuǎn)運動的傳動關(guān)系,構(gòu)建了傳動關(guān)系模型[4]21-35,研究了裝置結(jié)構(gòu)參數(shù)和輸送速度對不同卵形體農(nóng)產(chǎn)品翻轉(zhuǎn)運動的影響[5]10-58[6]40-58;對于卵形體農(nóng)產(chǎn)品的基本特征參數(shù),孫柯等[7]利用不同類型的禽蛋以及形似雞蛋的鋁質(zhì)和塑料模型,研究了質(zhì)量和材質(zhì)對翻轉(zhuǎn)運動的影響。但由于卵形體農(nóng)產(chǎn)品基本特征參數(shù)具有隨機性和不可控制性,難以探討基本特征參數(shù)對翻轉(zhuǎn)運動規(guī)律的影響;其次,實際試驗中翻轉(zhuǎn)運動過程中的摩擦力、接觸點位置等重要參數(shù)難以測定,制約了翻轉(zhuǎn)運動過程的動力學分析。目前,卵形體農(nóng)產(chǎn)品翻轉(zhuǎn)運動在實際試驗機上的研究比較多[3][4]21-48[5]10-58[6]40-58[7-9][10]55-77 [11]9-25,但未見利用仿真虛擬機(仿真模型)研究其運動規(guī)律的相關(guān)報道。
試驗擬利用仿真軟件建立卵形體農(nóng)產(chǎn)品大小頭自動定向的翻轉(zhuǎn)運動仿真模型,在仿真模型中創(chuàng)建翻轉(zhuǎn)運動核心運動參數(shù)的測量方法,并利用3D打印的模擬卵形體驗證所建立的翻轉(zhuǎn)運動仿真模型的有效性和可信度,為卵形體農(nóng)產(chǎn)品翻轉(zhuǎn)運動動力學特性研究提供依據(jù)。
1 卵形體農(nóng)產(chǎn)品翻轉(zhuǎn)運動過程
1.1 大小頭自動定向運動全過程
分列翻轉(zhuǎn)式的卵形體農(nóng)產(chǎn)品大小頭自動定向處理過程主要由卵形體農(nóng)產(chǎn)品在輸送輥上小頭指向不同的分列軸向運動和其中一列的翻轉(zhuǎn)運動組成[10]11-14,圖1是卵形體農(nóng)產(chǎn)品大小頭自動定向處理裝置。卵形體農(nóng)產(chǎn)品在輸送輥上的分列軸向運動是一種特殊的直動交錯軸摩擦輪傳動,而卵形體農(nóng)產(chǎn)品在輸送輥上的翻轉(zhuǎn)運動是一種特殊的空間凸輪傳動[8]。
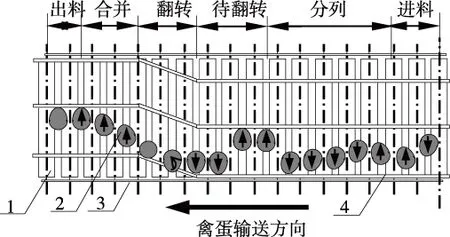
1. 輸送輥 2. 卵形體農(nóng)產(chǎn)品 3. 輸送鏈 4. 導向桿
1.2 翻轉(zhuǎn)工作原理
由圖2可知,翻轉(zhuǎn)階段工作部件主要是由輸送輥和彎曲的導向桿組成。當卵形體農(nóng)產(chǎn)品隨輸送輥進入翻轉(zhuǎn)段時,輸送輥僅作輸送運動(移動)而不繞其支撐軸轉(zhuǎn)動,卵形體農(nóng)產(chǎn)品相對于其支撐輸送輥處于靜止狀態(tài),卵形體農(nóng)產(chǎn)品的小頭端開始與彎曲的導向桿接觸;隨著輸送輥輸送運動的持續(xù),卵形體農(nóng)產(chǎn)品小頭端被彎曲段導向桿逐漸抬起,而大頭端在輸送輥上作滾動,直至卵形體農(nóng)產(chǎn)品長軸垂直于輸送輥軸線,之后卵形體農(nóng)產(chǎn)品在慣性和重力的繼續(xù)作用下翻轉(zhuǎn),而后進入合并歸列段[8]。
1.3 翻轉(zhuǎn)過程的運動特征
根據(jù)翻轉(zhuǎn)過程的運動特征,將其全過程分為起始狀態(tài)、中間狀態(tài)、臨界狀態(tài)和完成狀態(tài)4個狀態(tài)[3],如圖3所示。將卵形體農(nóng)產(chǎn)品靜置于兩輸送輥間并隨輸送輥僅作移動,逐漸向?qū)驐U靠近,當其小頭端與導向桿接觸時,此時處于起始狀態(tài);隨著卵形體農(nóng)產(chǎn)品小頭端被呈一定角度的導向桿逐漸抬起,此時一直處于中間狀態(tài);當長軸與輸送輥軸線垂直時,卵形體農(nóng)產(chǎn)品此時處于臨界狀態(tài);越過臨界狀態(tài)后,卵形體農(nóng)產(chǎn)品在慣性和重力的作用下翻轉(zhuǎn),完成定向[8]。
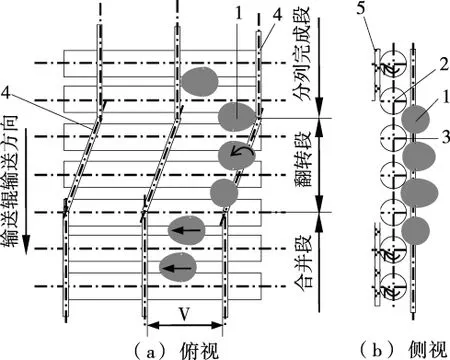
1. 卵形體農(nóng)產(chǎn)品 2、3. 輸送輥 4. 導向桿 5. 橡膠墊
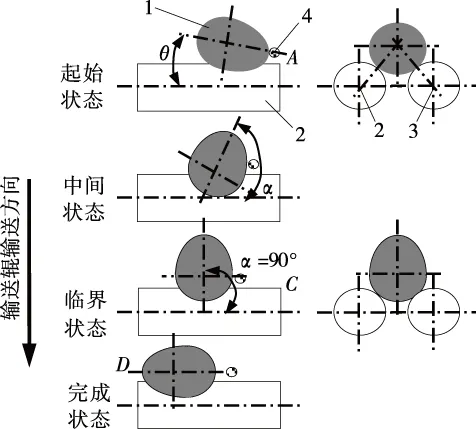
1. 卵形體農(nóng)產(chǎn)品 2、3. 輸送輥 4. 導向桿
卵形體農(nóng)產(chǎn)品與導向桿的接觸始于A點終于C點,AC段導向桿沿輸送輥軸線方向的位移即為導向桿作用距離;AD段卵形體農(nóng)產(chǎn)品小頭端沿輸送輥軸線方向移動的距離為翻滾距離[4]21-35。翻滾距離和導向桿作用距離是翻轉(zhuǎn)運動的兩個核心參數(shù),分別表征著裝置結(jié)構(gòu)的緊湊型和卵形體農(nóng)產(chǎn)品翻轉(zhuǎn)速度。
2 卵形體農(nóng)產(chǎn)品翻轉(zhuǎn)運動仿真模型的建立與求解
2.1 三維模型的建立
基于1.2中所描述卵形體農(nóng)產(chǎn)品翻轉(zhuǎn)過程使用到的工作部件,結(jié)合ADAMS仿真軟件可直接在構(gòu)件上添加約束和運動副的特點,可簡化原先的翻轉(zhuǎn)運動機械系統(tǒng),只需建立必要構(gòu)件的三維模型,包括模擬卵形體、兩根平行輸送輥以及導向桿。
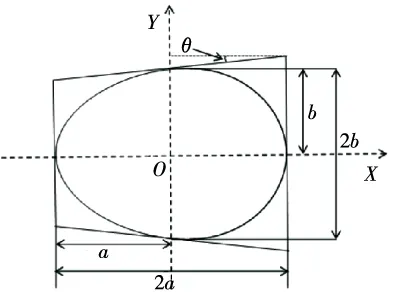
圖4 卵形曲線Figure 4 The curve of ovoid shape
利用創(chuàng)建模型功能的圓柱體功能元分別構(gòu)建輸送輥和導向桿兩個部件,其中輸送輥半徑為20 mm,長度為500 mm,導向桿半徑為5 mm,長度為600 mm。
利用旋轉(zhuǎn)移動組合命令將各構(gòu)件移動到合適的位置,保證兩輸送輥軸線相互平行且軸線在同一水平面上,調(diào)整導向桿彎曲角度為30°,導向桿距輸送輥表面高度為0 mm。由于ADAMS軟件繪制圓柱體時,其圓形端面是由多條線段組合而成,側(cè)面由多條母線組合而成,因此為了保證輸送輥和導向桿的表面狀況更加平滑,將側(cè)面分割數(shù)和端面分割數(shù)均設(shè)置為90[10]17-23。建立的卵形體大小頭自動定向的翻轉(zhuǎn)運動三維模型如圖5所示。
2.2 材料屬性的添加
三維模型中每個構(gòu)件的材料屬性均默認為鋼材料,需要自主定義添加材料屬性,從而使仿真模型與實際情況更加貼合。選中構(gòu)件的自定義修改命令,在材料類型一欄中選擇創(chuàng)建新材料,需要對新輸入材料的密度、楊氏模量和泊松比進行定義。
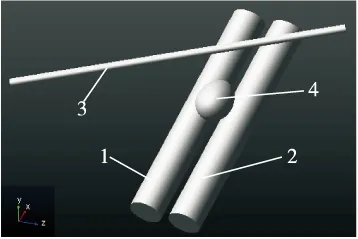
1、2. 輸送輥 3. 導向桿 4. 卵形體
根據(jù)試驗中使用到的3D打印模擬卵形體、尼龍輸送輥和碳鋼導向桿,其材料屬性參數(shù)如表1所示[10]17-23。
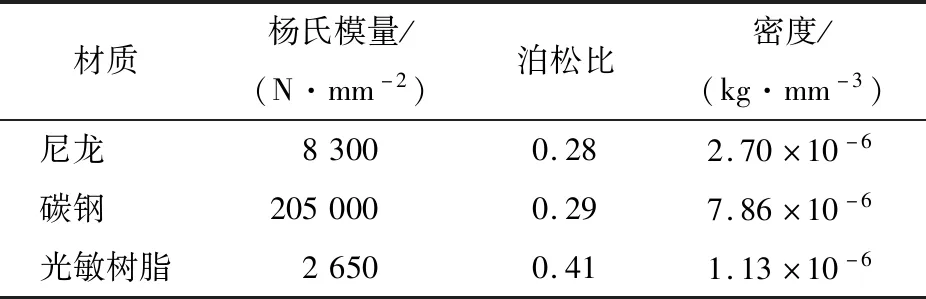
表1 材料的屬性參數(shù)Table 1 Stuff property parameters
2.3 約束副和驅(qū)動的設(shè)置
依據(jù)1.2中對卵形體農(nóng)產(chǎn)品翻轉(zhuǎn)工作原理的闡述,對模型中的各構(gòu)件設(shè)置約束副。在兩根輸送輥的質(zhì)心位置添加相對于地面的移動副,再使用耦合、副耦合兩個移動副,使得兩個移動副形成傳動的效果,最后設(shè)置導向桿相對于地面的固定副。
在移動副上添加一沿z軸負方向移動的平移驅(qū)動,定義其驅(qū)動函數(shù)為S=50×time,表示輸送輥以50 mm/s的移動速度勻速移動。
2.4 接觸函數(shù)的設(shè)置
ADAMS中對接觸力的定義有兩種方式,分別是補償法和沖擊函數(shù)法[13]。考慮卵形體翻轉(zhuǎn)運動過程中在輸送輥上的實際情況,選取沖擊函數(shù)法計算兩構(gòu)件間的接觸力。沖擊函數(shù)的表達式為[14]:
F_impact=
(1)
式中:
q0——兩物體間的初始距離,mm;
q——兩物體碰撞過程中的實際距離(當后者小于前者時才會產(chǎn)生接觸力),mm;
K——接觸剛度,N/mm1.5;
e——力指數(shù)(用來計算瞬時法向力中材料剛度貢獻值的指數(shù));
Cmax——最大阻尼系數(shù),N·s/mm;
d——切入深度,mm。
對于旋轉(zhuǎn)物體,剛度系數(shù)取決于碰撞物體的材料和結(jié)構(gòu)形狀[15],接觸剛度值K由Hertz理論計算得到:
(2)
(3)
(4)
式中:
R1、R2——接觸點處的接觸半徑,mm;
μ1、μ2——構(gòu)件材料的泊松比;
E1、E2——構(gòu)件材料的彈性模量,N/mm2。
另外,接觸力函數(shù)還需設(shè)置μs和μd,其值按照文獻[11]10-11的方法利用質(zhì)構(gòu)儀測定得到,其值大小取決于各個構(gòu)件的材料及其表面狀況,其他參數(shù)通過經(jīng)驗和試驗獲得。
根據(jù)驗證實驗的真實情況進行計算,得到3D打印的模擬卵形體和輸送輥的屬性相關(guān)參數(shù)[16]設(shè)置見表2,接觸力屬性設(shè)置參數(shù)見表3。
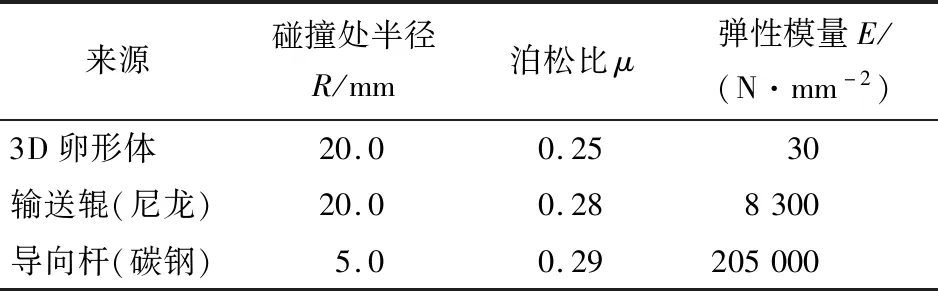
表2 卵形體和輸送輥屬性相關(guān)參數(shù)Table 2 Parameters related to the properties of ovoid body and convey rollers

表3 接觸力屬性設(shè)置Table 3 Property settings of the contact force
2.5 評價指標測量函數(shù)的創(chuàng)建
創(chuàng)建點測量,分別對卵形體小頭端點和大頭端點x軸方向(卵形體移動方向)的坐標位置進行測定,對卵形體和導向桿的接觸點x軸方向的坐標位置進行測定。創(chuàng)建接觸力測量,對卵形體和導向桿間的接觸力的大小進行測定。當接觸力大小不再為0值時,卵形體剛接觸導向桿,處于翻轉(zhuǎn)過程的起始狀態(tài);當卵形體大、小頭端x軸方向的坐標值相同時,處于翻轉(zhuǎn)過程的臨界狀態(tài);當小頭端x軸坐標值達到最大時,卵形體處于完成狀態(tài)。
當小頭端、大頭端X坐標位置相同時,導向桿作用距離:
X=xc-xs,
(5)
式中:
X——導向桿作用距離,mm;
xc——卵形體與導向桿接觸點的x軸坐標值,mm;
xs——剛接觸導向桿時小頭端x軸坐標值,mm。
當卵形體完成翻轉(zhuǎn)運動時,翻滾距離:
M=xe-xs,
(6)
式中:
M——翻滾距離,mm;
xe——完成翻轉(zhuǎn)時刻小頭端x軸坐標值,mm。
2.6 仿真相關(guān)參數(shù)設(shè)置
對仿真模型的仿真時間、計算步長、仿真類型進行設(shè)定。設(shè)置仿真時間T=5 s,步長為1 000,仿真類型選用動力學仿真。
3 卵形體翻轉(zhuǎn)運動仿真模型的試驗驗證
3.1 試驗材料與設(shè)備
對7枚光敏樹脂材料加工而成的3D打印模擬卵形體分別進行編號,其形狀尺寸大小與雞蛋類似,且7枚模擬卵形體的基本特征參數(shù)單一變化,分別以短軸徑、長軸徑和蛋形角為變化因素,各取3個水平。詳細的模擬卵形體基本特征參數(shù)見表4。
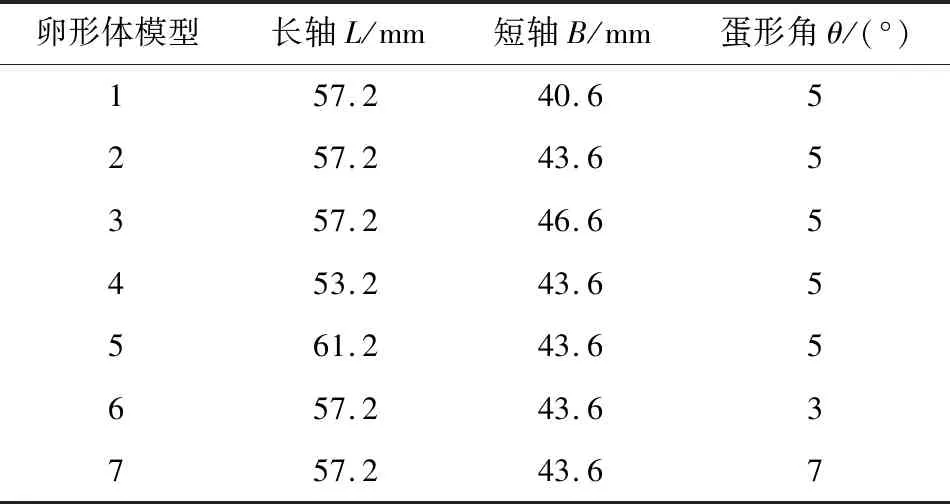
表4 模擬卵形體基本特征參數(shù)Table 4 Basic characteristics of simulative ovoid body
試驗中具體使用到的試驗設(shè)備與文獻[10]24-33中使用的設(shè)備一致。
3.2 試驗方法
3.2.1 模型驗證 選用直徑為40 mm、尼龍材質(zhì)的輸送輥和直徑為10 mm、碳鋼材質(zhì)的導向桿,在導向桿距輸送輥的高度為0 mm的條件下,利用3D打印卵形體模型按表5進行翻轉(zhuǎn)運動仿真模型的試驗驗證。
如表5試驗設(shè)計所示,選取長軸L、短軸B、蛋形角θ、輸送輥中心距E、導向桿彎曲角度γ、以及輸送輥移動速度v等6個變化因素,每個因素分別選取3個水平進行試驗驗證。
3.2.2 真實試驗中翻轉(zhuǎn)運動核心參數(shù)的測定 參照文獻[4]21-35中對翻轉(zhuǎn)運動參數(shù)的測定方法,對翻滾距離M和導向桿作用距離X進行測定。
3.2.3 仿真模型中翻轉(zhuǎn)運動核心參數(shù)測定 利用仿真后處理ADAMS/PostProcessor模塊,對仿真模型中建立的點測量和接觸力測量函數(shù)進行數(shù)值提取。分別按式(5)、(6)計算翻滾距離和導向桿作用距離。
3.3 結(jié)果與分析
表6為6種不同因素水平下,翻轉(zhuǎn)運動的兩個核心運動參數(shù)的實測值和仿真值以及二者相對誤差。由表6可知,在不同的試驗條件下,模擬卵形體實測結(jié)果和仿真結(jié)果變化規(guī)律基本吻合,從蛋形角、長軸和短軸來看,翻滾距離和導向桿作用距離幾乎均隨著因素水平的增大而增大;從輸送輥中心距來看,翻滾距離和導向桿作用距離均隨著因素水平的增大而減小;從導向桿彎曲角度來看,翻滾距離和導向桿作用距離隨著因素水平的增大而增大;從輸送輥移動速度來看,翻滾距離和導向桿作用距離的變化不明顯,翻滾距離和導向桿作用距離隨以上3個因素的變化規(guī)律均與文獻[9]中禽蛋的變化規(guī)律以及文獻[4]36-48中塑料和鋁質(zhì)模擬卵形體的變化規(guī)律均吻合。同時,試驗數(shù)值和仿真數(shù)值間的相對誤差都在10%以內(nèi)。
利用仿真結(jié)果在對翻轉(zhuǎn)運動核心參數(shù)進行測定時有較高的可信度,表明所建立的卵形體農(nóng)產(chǎn)品翻轉(zhuǎn)運動仿真模型是有效的,采用該模型研究卵形體農(nóng)產(chǎn)品進行翻轉(zhuǎn)運動規(guī)律是可行的。
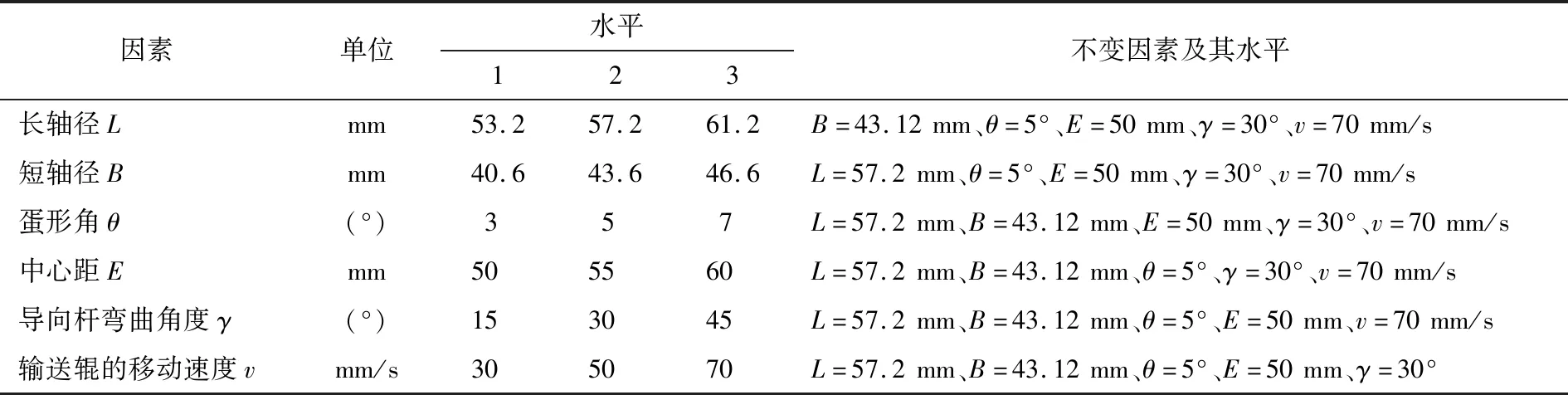
表5 翻轉(zhuǎn)運動仿真模型的試驗設(shè)計Table 5 Design of verification experiments for simulation model of turnover motion
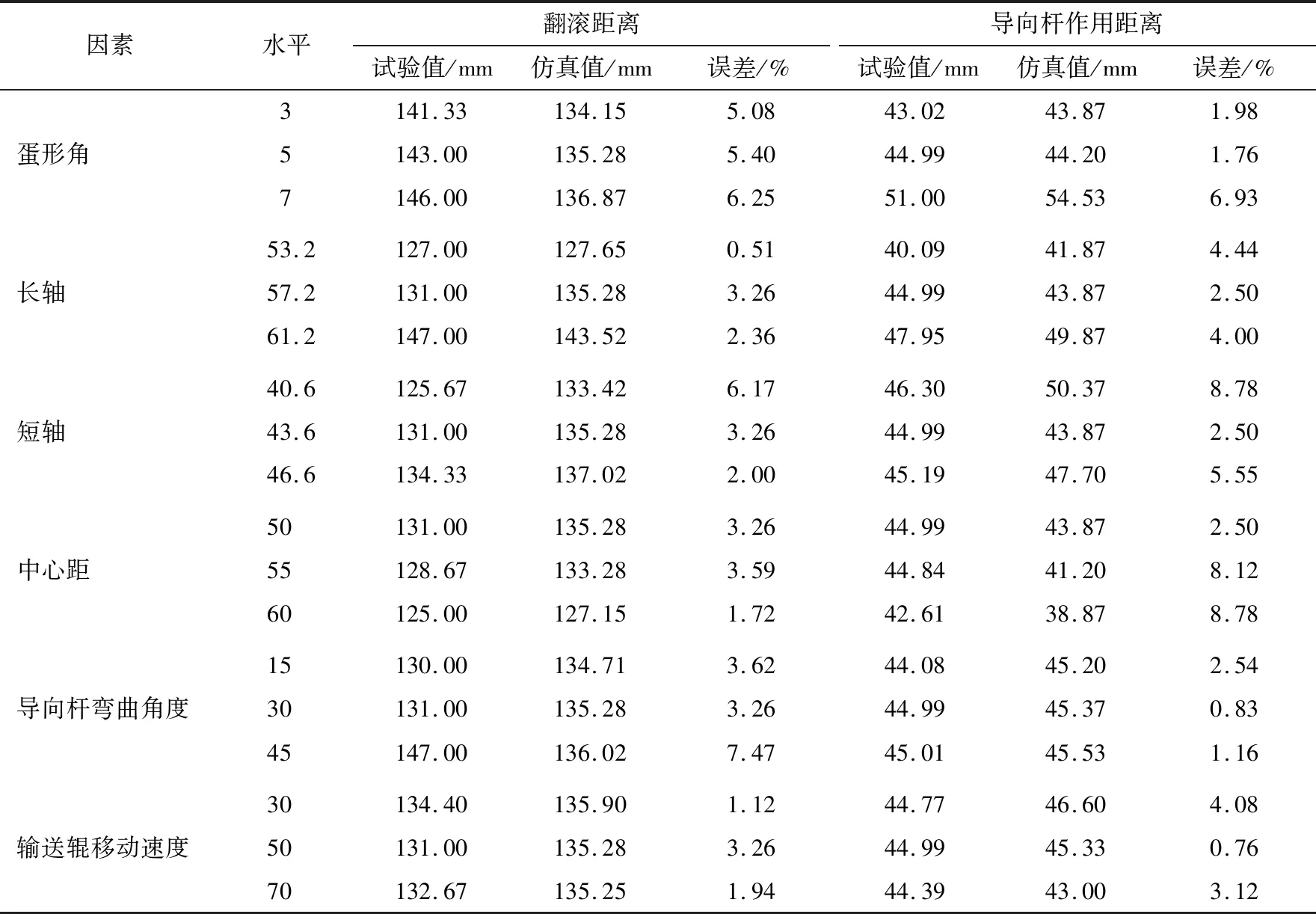
表6 試驗結(jié)果Table 6 Verification test results
4 結(jié)論
(1) 設(shè)計建立了由卵形體、輸送輥、導向桿組成的數(shù)字化虛擬樣機(仿真模型),并創(chuàng)建了卵形體翻滾距離和導向桿作用距離仿真值的測量方法。
(2) 不同蛋形角(3°,5°,7°)、長軸(53.2,57.2,61.2 mm)、短軸(40.6,43.6,46.6 mm)、中心距(50,55,60 mm)、導向桿彎曲角度(15°,30°,45°)、輸送輥移動速度(30,50,70 mm/s)的仿真值與實際試驗值的變化規(guī)律基本吻合,相對誤差均在10%以內(nèi),表明所建的仿真模型是可信的和有效的,利用仿真模型研究翻轉(zhuǎn)運動規(guī)律是可行的。
(3) 對于不同的卵形體農(nóng)產(chǎn)品大小頭自動定向翻轉(zhuǎn)運動的仿真模型有待于進一步的優(yōu)化,并研究各因素對不同的卵形體農(nóng)產(chǎn)品翻轉(zhuǎn)運動的影響規(guī)律,以及卵形體農(nóng)產(chǎn)品翻轉(zhuǎn)運動的動力學特性。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數(shù)學備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數(shù)學備考)(2020年9期)2021-01-04 00:25:14
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19