基于組合線陣的近程運動小目標被動定位跟蹤
2020-03-10 12:06:06許高鳳安妍妍楊豐茂靳仕源
應用聲學 2020年1期
關鍵詞:卡爾曼濾波
許高鳳 安妍妍 楊豐茂 張 喬 靳仕源
(中電科海洋信息技術研究院有限公司 北京 100041)
0 引言
針對水下小目標的淺海入侵、港口滲透偵察等威脅,近岸水域水下安全防御措施需不斷加強完善,蛙人探測聲吶系統是一種有效的探測手段。與主動蛙人探測聲吶相比,被動探測陣具有很好的隱蔽性且功耗較低,能夠長期鋪設在海底,對水面及水下目標進行探測、定位等。基于被動聲吶的這些優點,研究近程運動目標被動定位方法。被動定位方法有三元陣被動測距方法、目標運動分析(Target motion analysis,TMA)和匹配場處理(Matched field processing,MFP)、時間反轉鏡(Time reversal mirror,TRM)、近場聲全息技術(Near-field acoustical holography,NAH)、聲圖測量法等。三元陣被動定位方法在400 m 以內的近距離定位誤差較大[1],且目標距離越近,其定位性能越差[2]。TMA[3?4]和MFP[5]都屬較成熟的遠程定位方法,立意于提高作用距離和降低檢測門限,不關注于近場。TRM 在被動定位技術上的應用尚不成熟,且定位精度不高。NAH[6]針對的是極近距離聲場分析,不適用于中近距離目標的跟蹤定位。聲圖測量方法[7?8]對百米距離范圍內的目標有較高的被動定位精度,目前大多學者主要研究線陣或十字陣被動定位,且主要關注極近距離、中低頻目標,主要用來測量艦船等某部位的輻射噪聲源位置[9]。本文以聲圖測量方法為基礎,采用組合線陣寬帶最小方差無畸變失真響應(Minimum variance distortionless response,MVDR)聚焦波束形成技術,實現近場水下小目標的高精度被動定位。
直線陣是基陣信號處理中最常用的陣型結構,這是由于直線陣陣型結構簡單,易于數學上的處理。但是直線陣在對目標進行定位時,存在左右弦模糊問題,本文采用橫豎相間的組合線陣來克服此問題。陣列孔徑越大定位精度越高,而水下大型半波間距陣布放代價很大,本文針對水下非合作目標出現的實際區域,采用稀疏布陣方式,結合寬帶信號處理方法,克服陣列稀疏帶來的影響。濾波與預測是TMA 算法的核心,其中卡爾曼(Kalman)濾波[10]是典型的線性無偏最小方差估計器,本文針對運動近程目標,結合卡爾曼濾波對目標位置進行估計,并采用目標軌跡匹配算法,實現對運動目標的跟蹤定位。
1 組合線陣近場測量模型
利用均勻聲壓線陣對近程目標進行定位時,聚焦波束形成的縱向分辨率較低,且在實際測量中不能保證目標處于線列陣的開角范圍內。同時,利用單條線列陣進行噪聲源的定位時會產生左右舷模糊問題,這些會導致以上定位方法的性能急劇惡化,甚至不能正確判別噪聲源的位置。采用互相垂直的多條線陣能有效解決以上問題,抑制左右舷模糊,提高定位性能。
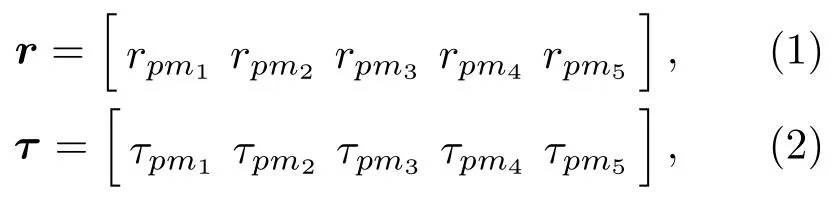
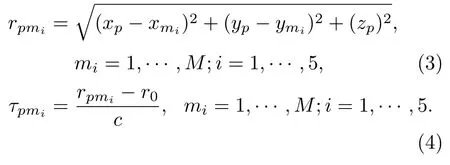
如圖1所示,1號、3號、5號陣為位于x軸的水平線陣,2 號、4 號陣為垂直于x軸的線陣,1 號陣的左側第一陣元位于坐標原點,相鄰陣列間距為D。每條子陣由M個陣元組成,陣元間距為d,各陣元的位置坐標為(xmi,ymi,0)(mi=0,··· ,M;i=1,··· ,5),總陣元數為5M。以原點處的陣元為參考陣元,第p號聲源與參考陣元間的距離為d,第p號聲源(xp,yp,zp)距離其他陣元的距離矢量和時延矢量為
其中,
第p號聲源對應的維方向向量為

式(5)中,Ai=[e?j2πfjτpmi]T(mi=1,··· ,M;i=1,··· ,5)。
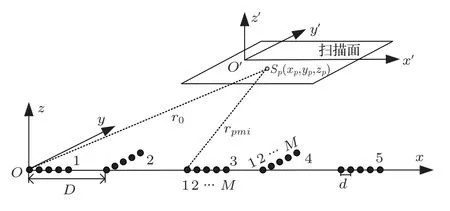
圖1 組合線陣目標近場測量模型Fig.1 Combination linear array target measurement model
2 組合線陣近場定位原理
近場聚焦波束形成是將一定幾何形狀排列的多元陣,按球面波擴展方法對各陣元接收到的信號進行時延或相移補償處理,當補償到聲源位置處時,各陣元接收信號會形成同相迭加,出現“聚焦”點,聚焦峰對應的空間位置即為聲源位置。
當組合線陣的近場區域存在P個聲源,聲源輻射信號為sp(t)(p=1,··· ,P),第m號陣元接收信號Bm(t)為
式(6)中,Ap表示聲源功率,rpm為聲源sp到第m號陣元之間的距離,τpm=rpm/c為相應的傳播時延。
將陣列接收信號分為L個子段,每段為?T,對陣元接收數據做J點離散傅里葉變換(Discrete Fourier transformation,DFT),得到寬帶信號模型:
式(7)中,Xl(fj)、Sl(fj)、Nl(fj)分別對應頻率fj的接收數據、信號和噪聲的DFT變換。
第p個聲源對應的方向向量為
以基于幅度補償的MVDR[11]的近場聚焦波束形成為基礎,得到組合線陣輸出的空間譜為
式(10)中,
依照多重信號分類方法,對協方差矩陣R(fj)進行修正,首先對其進行奇異值分解其中U、V的列向量為R(fj)的左奇異向量與右奇異向量;S=diag(σ1,··· ,σP);N=diag(σP+1,σP+2,··· ,σ5M),σ1,σ2,··· ,σP,σP+1,σP+2,··· ,σ5M為R(fj)的奇異值,可以反映信號和噪聲能量集中情況,將反映噪聲的奇異值置零,能去除信號中的噪聲[12]。對協方差矩陣進行重構,得到采用重構后的協方差矩陣進行聚焦波束形成,進一步抑制了噪聲干擾,提高目標定位精度。
3 目標跟蹤方法
目標跟蹤是指計算機或其他儀器設備依據某種算法實現對目標的跟蹤與定位,并根據目標的位置和動向采取相應措施。通過上述波束形成方法得到目標位置信息,采用閾值檢測、卡爾曼濾波及跟蹤方法實現目標的連續跟蹤[13]。由于水聲環境的復雜,定位結果經常會受環境噪聲影響出現不確定的中斷和野值,嚴重影響目標定位跟蹤,本文根據卡爾曼濾波預測目標當前時刻位置,確保不會因為目標漏檢而跟蹤中斷。
卡爾曼濾波利用前一時刻的估計值和當前時刻的觀測值得到當前時刻的狀態估計值。設目標在n時刻位置為(x,y),vx、vy分別為目標的運動速度,則目標的運動特性為
目標的狀態矢量為Xn=[x(n),y(n),vx,vy]T,狀態轉移函數An=,可以對目標位置做出有根據的預測,即使伴隨著水下環境干擾,卡爾曼濾波總能指出目標的最真實位置。
卡爾曼濾波遞推公式為
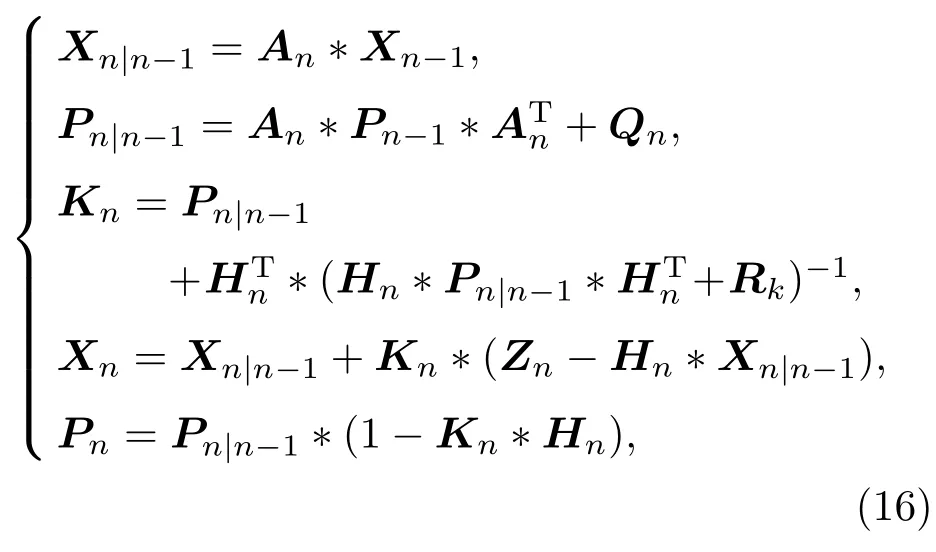
式(16)中,Xn|n?1為預測狀態矢量;Pn|n?1為預測誤差的方差矩陣;Qn為量測噪聲;Rk為測量噪聲的方差矩陣;此處觀測值為(x,y),聚焦波束形成得到目標位置Zn=(xn,yn)作為測量輸入,假設目標做勻速運動,觀測矩陣
目標跟蹤算法流程如圖2 所示。目標跟蹤算法的核心思想是:
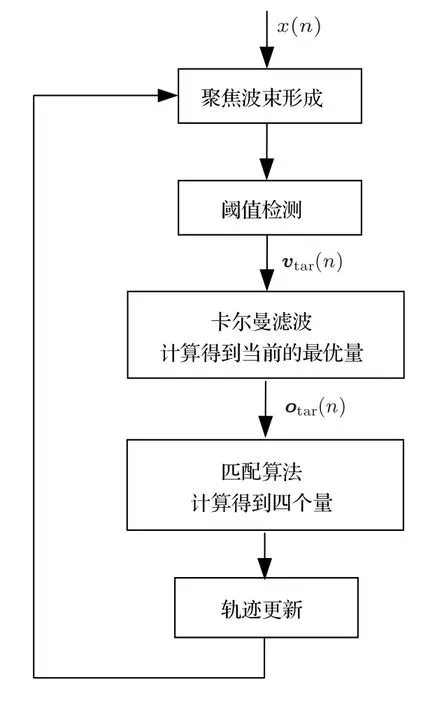
圖2 目標跟蹤算法流程Fig.2 The flow of target tracking algorithm
(1)對當前快拍(幀)的數據x(n)進行聚焦波束形成,通過閾值檢測到所有可疑目標的位置,即當前幀的目標位置觀測值vtar(n)。
(2)根據當前幀vtar(n)和上一刻的估計值ftar(n ?1)和”誤差”Etar(n ?1),通過卡爾曼濾波得到當前幀的運動目標位置“最優量”otar(n)。同時再預測下一幀的目標位置ftar(n)。
(3)在每幀中得到“最優量”otar(n)與之前正在跟蹤的目標軌跡T(k)關聯起來,通過設置四個量來記錄當前幀中軌跡和檢測到的目標“最優量”匹配結果:
DUnassigned:otar(n)與所有正在跟蹤的K條軌跡T(k)(k=1,2,··· ,K)都不能匹配;
DAssigned:otar(n)能匹配到某條軌跡T(k);
TUnassigned:匹配不到otar(n)的軌跡T(k);
TAssigned:匹配到otar(n)的軌跡T(k)。
(4)計算跟蹤軌跡上一幀位置和當前幀otar(n)之間的距離,若距離在但一定的范圍內,說明目標持續存在,將距離計算結果作為損失函數矩陣,再使用匹配算法,根據預設的閾值計算得到DUnassigned、DAssigned、TUnassigned、TAssigned。
(5)軌跡更新:將DAssigned更新至當前幀的TAssigned位置;由于各種干擾導致目標漏檢,目標可能在幾幀后再次被檢測到,預設一個閾值為最大不可見長度LInvisible,若連續LInvisible次沒有被檢測到,刪除該目標軌跡,停止跟蹤,否則軌跡依舊繼續跟蹤;將達到閾值的TUnassigned刪除;將DUnassigned生成新的跟蹤軌跡,當前幀DUnassigned可能是新的目標,也可能是噪聲引起的野值,預設一個最小可見次數LVisible,若持續LVisible幀都能檢測到,確定目標存在,輸出目標位置。
4 仿真實驗
4.1 目標定位仿真分析
假設有5條16元1.5 m間距線陣,3條水平擺陣與2 條垂直擺放,總陣元數為80,兩相鄰陣列(首陣元)間距為45 m;以第1 條陣1 號陣元為坐標原點,仿真信噪比SNR=0 dB,100~500 Hz的寬帶目標信號,設置目標在組合陣的不同位置,得到的定位結果如圖3所示。
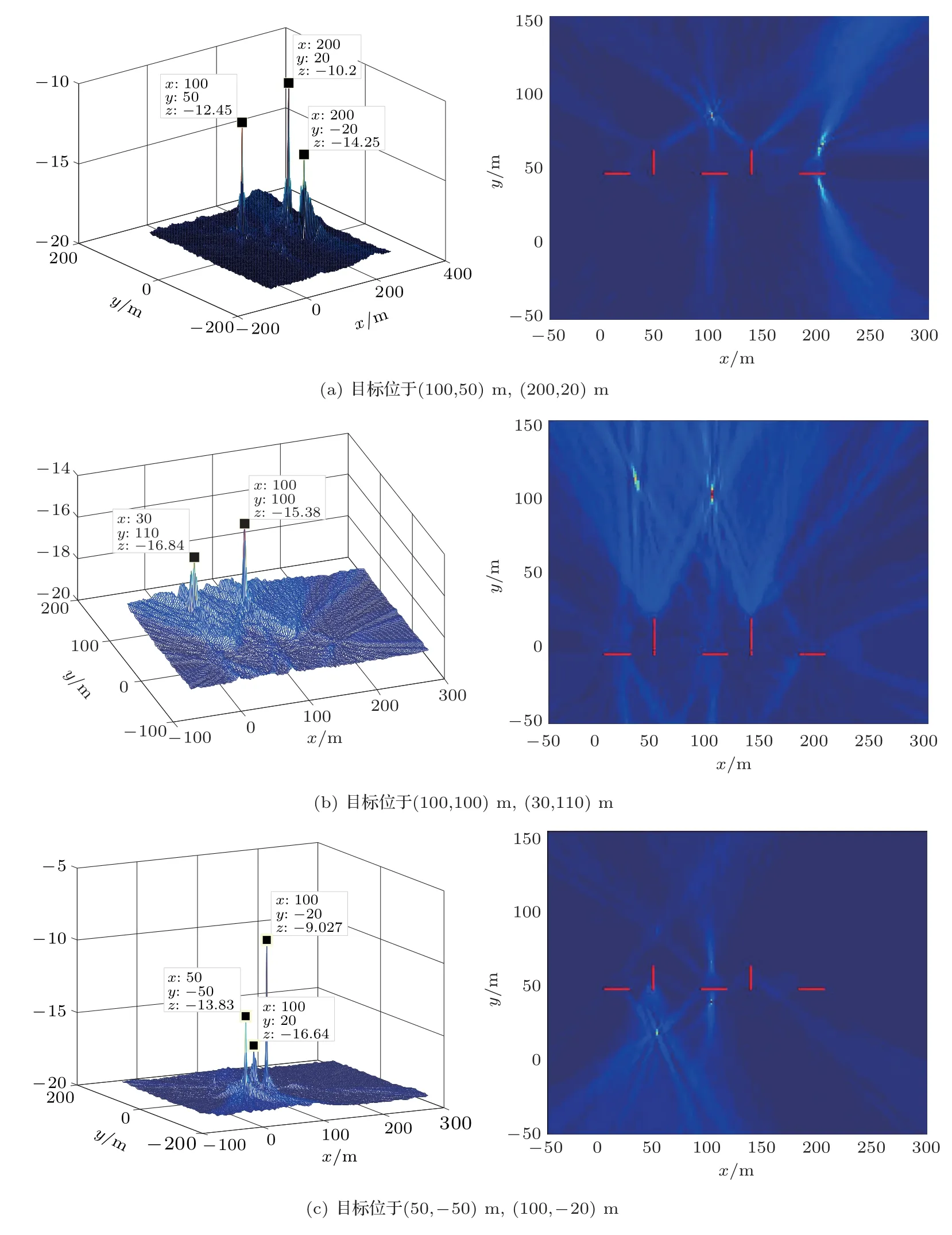
圖3 不同位置目標定位結果圖Fig.3 Location result of targets in different positions
4.2 信噪比對定位結果的影響
對位于(100,100)m 處的目標進行定位,定位誤差隨信噪比變化曲線如圖4 所示,并對每個信噪比進行1000次蒙特卡洛獨立實驗。
4.3 卡爾曼濾波預測結果分析
根據4.2 節得到的定位誤差隨信噪比變化曲線,生成一條SNR=?15 dB 的目標運動軌跡,即目標的坐標位置信息,為當前時刻的“測量值”,卡爾曼濾波根據當前幀的“測量值”和上一幀得到的“預測值”與“誤差”計算得到當前幀的最優位置,并預測下一幀計算需要的“預測值”。原始軌跡與卡爾曼濾波后的軌跡如圖5 所示,加隨機噪聲后的位置平均誤差為2.55 m,卡爾曼濾波后位置平均誤差1.42 m。

圖4 信噪比變化對定位的影響Fig.4 The influence of signal-to-noise ratio change on location
綜合上述仿真,得出以下結論:
(1)目標距離陣越近,定位效果越好;
(2)本文的組合線陣能有效抑制左右舷模糊,但當目標距離某條陣很近時,仍然有左右舷模糊影響,可以從空間譜幅度上分辨出目標真實位置;
(3)即使目標不在某條陣的有效探測范圍(?60?~60?)內,組合線陣也能準確地定位到目標;
(4)隨著信噪比的增加,定位誤差減小,當信噪比SNR =?15 dB 可以準確對百米范圍內目標進行定位;
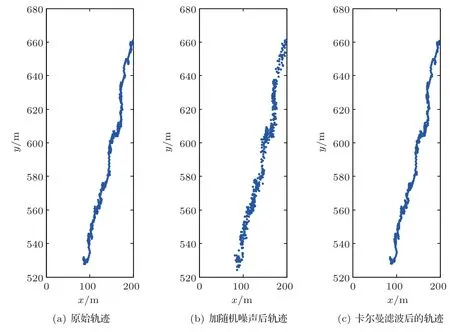
圖5 卡爾曼濾波預測效果圖Fig.5 Prediction effect of Kalman filter
(5)環境噪聲過大對定位結果有一定的影響,定位出現偏差不利于目標的連續跟蹤,卡爾曼濾波在一定程度上能抑制環境的影響,得到較為正確的目標位置。
5 海試試驗數據處理
本文用到的試驗數據是于2018年6月在渤海海試采集,試驗目的是利用組合線陣對水下蛙人小目標進行定位與跟蹤。試驗概況:試驗地點水深為3~4 m,5 條陣元間隔為1.5 m 的16 元聲壓水聽器構成的均勻線陣,相鄰陣列距離45 m。蛙人(如圖6所示)從距離3 號陣50 m 左右的位置下潛,垂直向3號陣游動。陣元坐標位置的準確與否,關系到目標定位效果的好壞。為實現目標的高精度定位,減少陣元位置誤差和幅相誤差,陣列布放后,對陣元坐標位置進行標定,通過陣列校正技術解決陣列誤差引起的導向矢量失配問題。
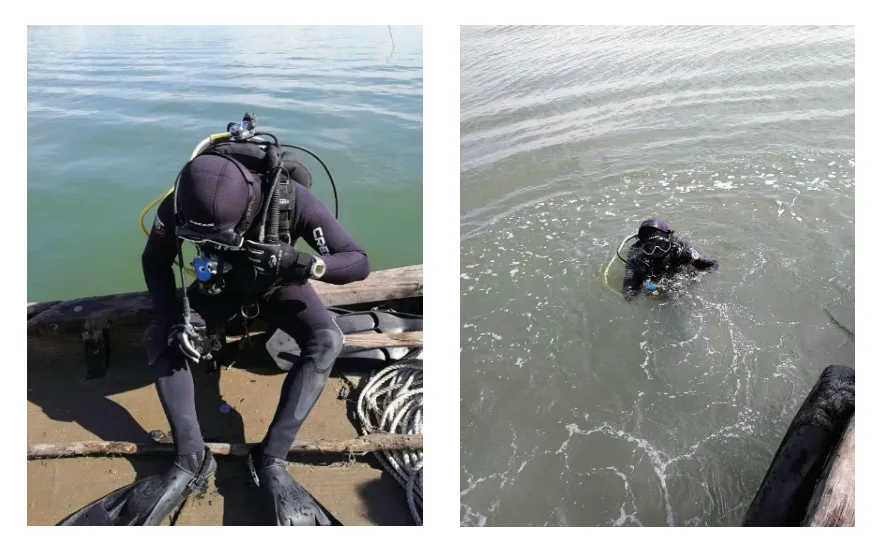
圖6 試驗用蛙人Fig.6 Experimental frogman
分析試驗用蛙人的拉鋸試驗數據進行時頻分析,結果如圖7 所示。圖7(a)為蛙人由遠處向陣游的時頻分析結果,圖7(b)為蛙人遠離陣的時頻分析結果。蛙人的時頻圖具有明顯的周期性,約為3 s,與蛙人呼吸頻率有關。蛙人離陣較遠時能量較弱,離陣較近時能量強。圖7(a)時間段帶內信噪比由低變高,約從?9.6 dB變化至?1.4 dB。
選取蛙人下潛后某一時刻的試驗數據,采用本文定位方法得到的結果如圖8所示。
選取圖7(a)段數據,對目標進行定位跟蹤,閾值設置為LInvisible=10、LVisible=5,跟蹤結果如圖9 所示,“?”表示某時刻測得的目標位置。圖9(a)為不加卡爾曼濾波的跟蹤結果,跟蹤中出現間斷,圖9(b)使用卡爾曼濾波后,能對目標進行連續的跟蹤定位。
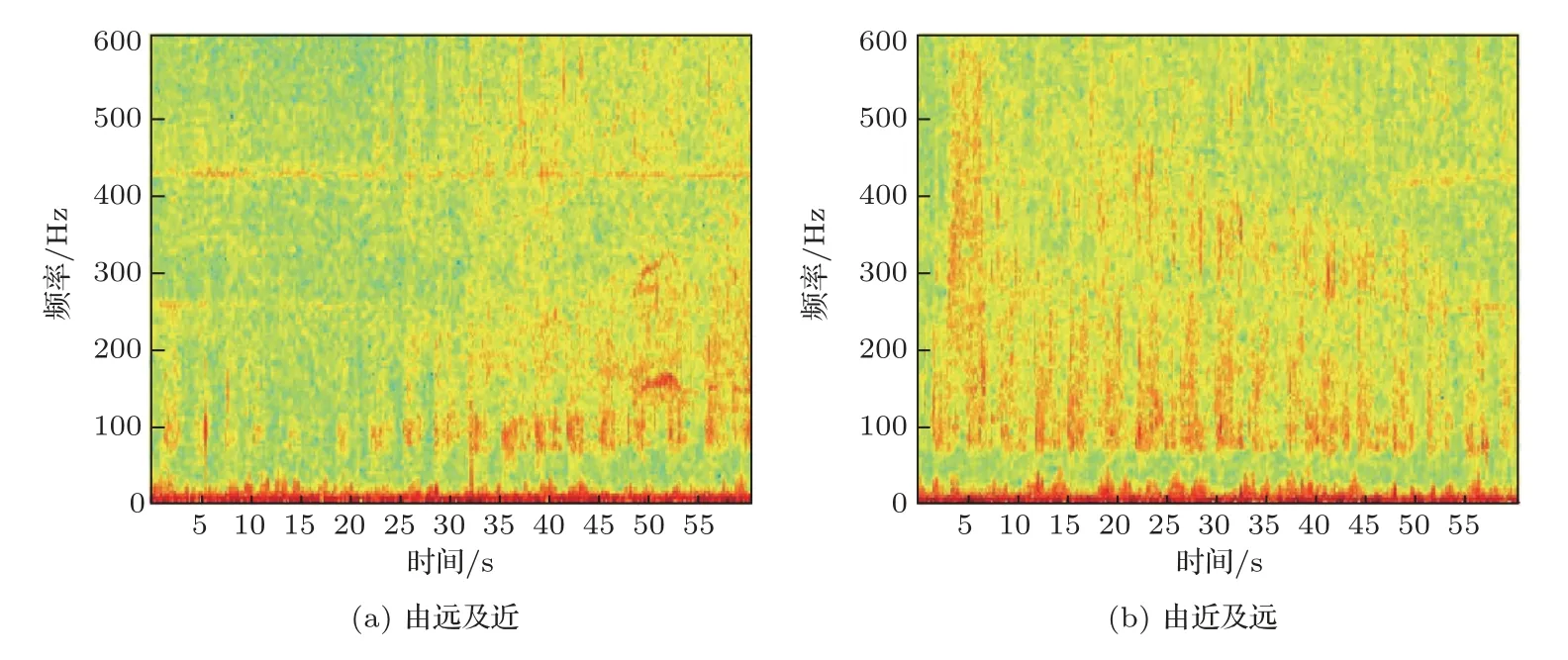
圖7 時頻分析結果Fig.7 Time-frequency analysis results
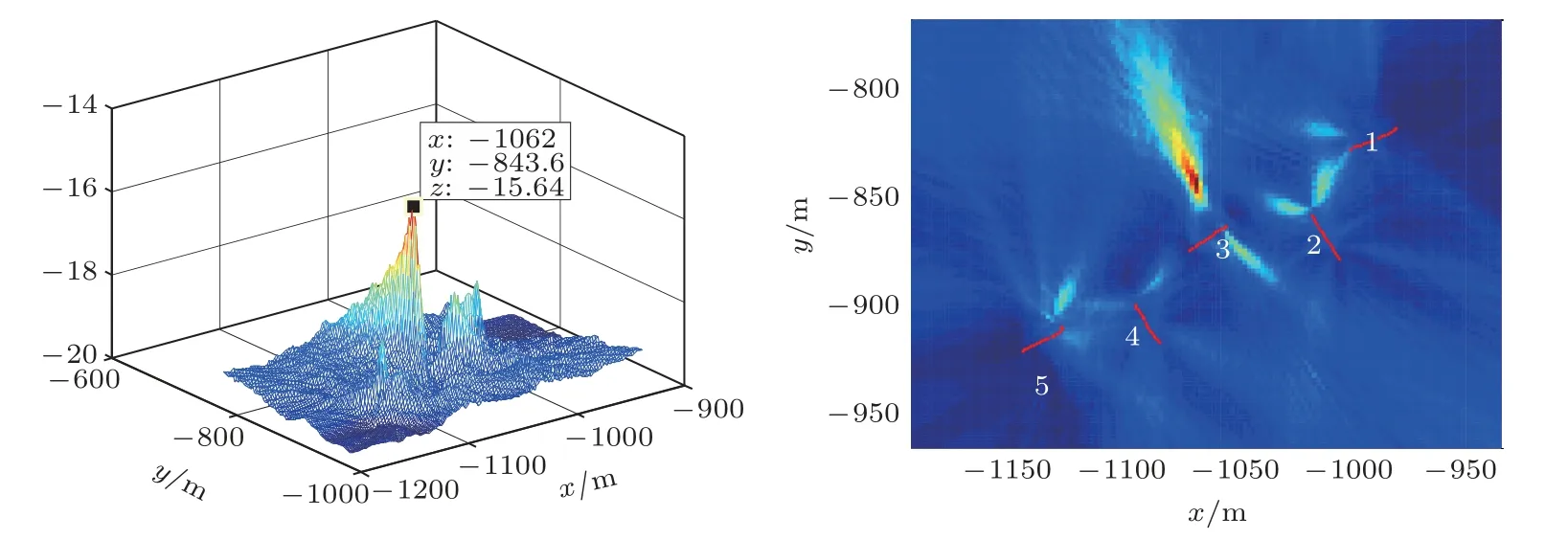
圖8 試驗數據目標定位結果Fig.8 Target location result of test data
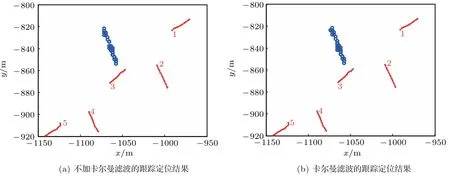
圖9 試驗數據目標跟蹤結果Fig.9 Target tracking result of test data
6 結論
本文基于組合線陣,采用修正的寬帶MVDR聚焦波束形成技術,實現近場目標的高精度被動定位,在一定程度上有效地抑制了左右弦模糊。并結合卡爾曼濾波跟蹤方法,實現了對近程運動目標的跟蹤,本文方法可用于近程小目標實時被動定位跟蹤系統。
猜你喜歡
測控技術(2018年11期)2018-12-07 05:49:38
測控技術(2018年12期)2018-11-25 09:37:34
電測與儀表(2017年20期)2017-12-19 05:14:28
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
中國慣性技術學報(2017年1期)2017-06-09 08:15:14
電測與儀表(2016年21期)2016-04-11 12:42:44
電源技術(2016年9期)2016-02-27 09:05:39
江蘇科技大學學報(自然科學版)(2015年4期)2015-12-17 12:42:50
電源技術(2015年1期)2015-08-22 11:16:28
電測與儀表(2015年24期)2015-04-09 12:04:36
