非均勻光照條件下的水下圖像增強(qiáng)算法
2020-03-11 11:29:48
(山東科技大學(xué) 電氣與自動(dòng)化工程學(xué)院,山東 青島 266590)
海洋蘊(yùn)藏著巨大的資源,水下圖像作為海洋信息的重要載體,受到了越來越多的關(guān)注和重視,同時(shí)水下圖像增強(qiáng)技術(shù)也得到了廣泛應(yīng)用,如水下目標(biāo)檢測(cè)與跟蹤[1]、水下基礎(chǔ)設(shè)施檢查[2]和海洋生物研究[3]等。與一般圖像不同,由于光的吸收和散射效應(yīng),導(dǎo)致水下圖像可見性差。其中,光的吸收減少了光照強(qiáng)度,且由于不同波長(zhǎng)的光譜在水中的傳播距離不同,造成水下圖像的顏色失真;光的散射引起了光傳播方向的變化,使圖像產(chǎn)生霧狀模糊。這些降質(zhì)特性導(dǎo)致水下圖像普遍存在模糊、偏色、對(duì)比度低等問題,極大限制了水下圖像在海洋資源利用中的實(shí)際應(yīng)用。因此,提升水下圖像的質(zhì)量具有重要意義。
針對(duì)光的吸收和散射效應(yīng),Lu等[4]結(jié)合引導(dǎo)三角雙邊濾波器提出一種新的水下模型對(duì)光進(jìn)行補(bǔ)償,實(shí)現(xiàn)對(duì)水下圖像的增強(qiáng)和顏色校正。Prasath等[5]通過對(duì)比度和色彩校正來克服水下光衰減以及光散射的問題,實(shí)現(xiàn)對(duì)水下圖像的增強(qiáng)。Guo等[6]針對(duì)水下圖像的模糊和偏色問題,將暗通道先驗(yàn)與定量直方圖拉伸技術(shù)相結(jié)合,提出一種改進(jìn)的基于暗通道先驗(yàn)的去霧增強(qiáng)算法。Abunaser等[7]利用粒子群優(yōu)化算法來減少光吸收和光散射對(duì)水下圖像的影響。Wang等[8]提出一種基于集成視網(wǎng)膜機(jī)制啟發(fā)模型的方法來實(shí)現(xiàn)對(duì)水下圖像的顏色校正和對(duì)比度改善。
水下圖像增強(qiáng)可根據(jù)人類的視覺感官系統(tǒng)進(jìn)行相應(yīng)的評(píng)估,Retinex理論建立在色感恒常性和人對(duì)光線感知能力的基礎(chǔ)上,許多學(xué)者通過Retinex理論增強(qiáng)水下圖像。Petro等[9]提出一種基于Retinex帶色彩恢復(fù)的多尺度視網(wǎng)膜增強(qiáng)算法,對(duì)水下淺層圖像具有較好的色彩還原效果。Alex等[10]將圖像轉(zhuǎn)換到Y(jié)CbCr色彩空間,并在Retinex框架下使用高斯環(huán)繞函數(shù)進(jìn)行卷積,提出一種基于單尺度Retinex的水下圖像增強(qiáng)算法。Tang等[11]利用多尺度Retinex對(duì)水下圖像進(jìn)行預(yù)校正,并采用逆灰度世界算法選擇性的保留圖像顏色,以實(shí)現(xiàn)顏色校正和改善水下圖像的對(duì)比度。
上述研究成果主要針對(duì)自然光照射下水下淺層的圖像增強(qiáng),對(duì)于人工光源照明為主的夜間水域或深海區(qū)域中的圖像增強(qiáng)效果不佳,相比于淺層圖像,深水圖像的可見度更低[12],光的吸收和散射效應(yīng)更加突出,獲取的圖像存在嚴(yán)重的光照不均,造成圖像質(zhì)量下降,如圖1中(a)、(b)、(c)所示。
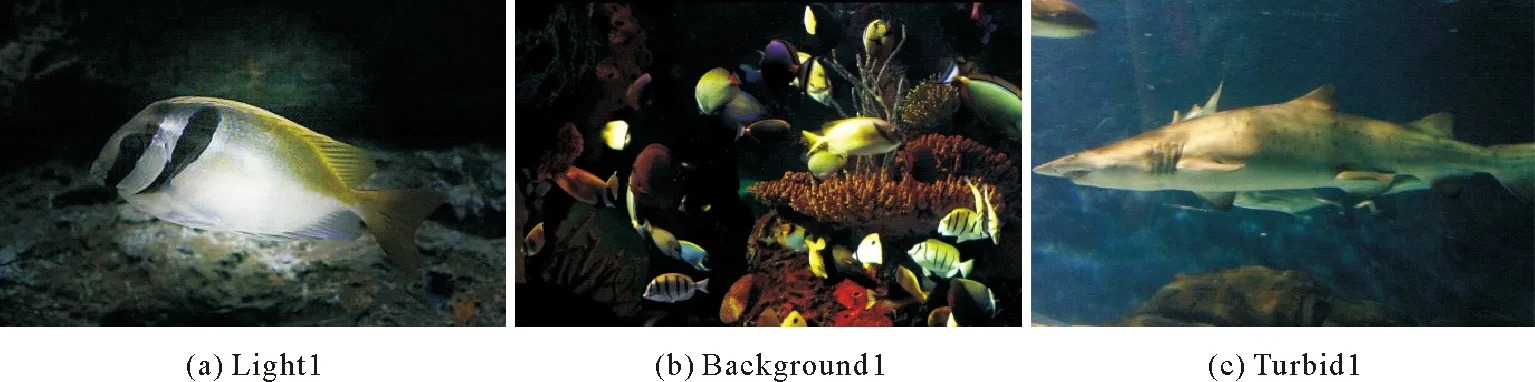
圖1 非均勻光照條件下的水下圖像
受人工光源影響,這類圖像近光點(diǎn)部分亮度偏強(qiáng),遠(yuǎn)光點(diǎn)則偏暗,同時(shí)存在著水對(duì)光的吸收和散射情況,若對(duì)整幅圖像增強(qiáng)處理,現(xiàn)有的算法效果不理想。為此,針對(duì)上述非均勻光照條件下的水下圖像,提出基于圖的視覺顯著性(graph-based visual saliency, GBVS)[13]和Retinex算法相結(jié)合的圖像增強(qiáng)方法,流程如圖2所示。首先,對(duì)水下圖像進(jìn)行降噪預(yù)處理,利用GBVS算法將原圖像分割為前景區(qū)域與背景區(qū)域。然后,基于Retinex算法分別對(duì)兩個(gè)區(qū)域增強(qiáng)處理,背景區(qū)域再利用伽馬變換進(jìn)行二次增強(qiáng)。最后,采用泊松融合算法合成兩個(gè)區(qū)域的增強(qiáng)圖像。

圖2 非均勻光照條件下的水下圖像增強(qiáng)流程圖
1 視覺顯著性分割
1.1 GBVS
GBVS是Harel等[13]基于Itti模型并結(jié)合圖論提出的一種自下而上視覺顯著性檢測(cè)方法。在非均勻光照條件下,水下圖像的前景區(qū)域相對(duì)于背景區(qū)域具有較強(qiáng)的顯著性,可采用GBVS算法分割兩區(qū)域。GBVS算法基本流程為:①對(duì)原圖像構(gòu)建{1/2,1/4}尺度圖像,并分別提取顏色特征、亮度(灰度)特征和方向特征(Gabor濾波器在{0°,45°,90°,135°}四個(gè)方向);②利用馬爾可夫鏈的特性分別計(jì)算每層特征圖的顯著值并生成激活圖;③融合三種特征的激活圖生成最終的顯著性圖。流程如圖3所示。

圖3 GBVS算法流程圖
1.2 區(qū)域分割
首先,分別對(duì)顏色、亮度、方向特征激活圖進(jìn)行尺度歸一化,再將每種特征的激活圖相加,得到對(duì)應(yīng)的顯著圖,如圖4所示,3種顯著圖從不同角度描述了圖像的顯著性;其次,將3幅顯著圖按照1∶1∶1的比例進(jìn)行線性疊加,生成最終的顯著圖S(i,j)和著色顯著圖(顯著性越強(qiáng)的區(qū)域越紅);然后,將S(i,j)按像素值由小到大形成列向量,并通過線性插值函數(shù)計(jì)算分割閾值T;最后,利用分割閾值T將原水下圖像分割為前景區(qū)域與背景區(qū)域。顯著圖及分割結(jié)果如圖5所示。從分割結(jié)果可以看出,根據(jù)視覺顯著性特征,可將非均勻光照下的水下圖像分割成不同區(qū)域,進(jìn)而分別實(shí)現(xiàn)對(duì)兩區(qū)域增強(qiáng)處理。
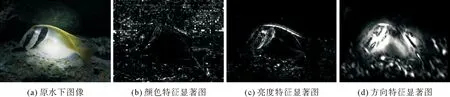
圖4 原圖及3中特征的顯著圖
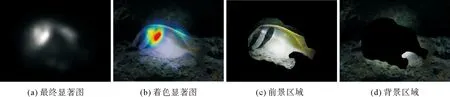
圖5 顯著圖及分割結(jié)果
2 前景和背景區(qū)域增強(qiáng)算法
在視覺顯著性分割基礎(chǔ)上,根據(jù)非均勻光照下水下圖像前景和背景區(qū)域的不同特點(diǎn)可采用相應(yīng)的增強(qiáng)算法。
2.1 前景區(qū)域增強(qiáng)
前景區(qū)域具有一定的視覺顯著性特征,但受到了水下非均勻光照影響,為此基于Retinex理論[14]對(duì)前景區(qū)域進(jìn)行增強(qiáng),其基本原理如下:
將前景區(qū)域圖像Ifg(i,j)定義為:
Ifg(i,j)=L(i,j)×R(i,j),
(1)
其中:R(i,j)為反射光圖像,即圖像內(nèi)在屬性,應(yīng)保留;L(i,j)為入射光圖像,應(yīng)去除。對(duì)式(1)等號(hào)兩邊分別取對(duì)數(shù)并移項(xiàng)得:
logR(i,j)=logIfg(i,j)-logL(i,j)。
(2)
其中,R(i,j)無法直接從圖像Ifg(i,j)得到,可通過估計(jì)L(i,j)后利用式(2)間接獲取。采用文獻(xiàn)[15]中的方法對(duì)入射光圖像L(i,j)進(jìn)行估計(jì):
(3)

2.2 背景區(qū)域增強(qiáng)
水下背景區(qū)域圖像除受到非均勻光照影響外,整體偏暗且光線成非線性發(fā)散。在前景區(qū)域增強(qiáng)算法的基礎(chǔ)上,利用伽馬非線性變換對(duì)背景區(qū)域圖像Ibg(i,j)進(jìn)行二次增強(qiáng),則式(2)可改寫為:
logRbg(i,j)=γ(logIbg(i,j)-logLbg(i,j))+logc。
(4)
其中,Lbg(i,j)表示背景區(qū)域的入射光圖像,Rbg(i,j)表示背景區(qū)域的反射光圖像,c為常數(shù),γ∈(0,1)。
利用上述前景和背景區(qū)域增強(qiáng)算法分別對(duì)圖5(c)、(d)兩個(gè)區(qū)域進(jìn)行增強(qiáng),增強(qiáng)后圖像如圖6所示。從增強(qiáng)效果可以看出,前景和背景區(qū)域都實(shí)現(xiàn)了增強(qiáng),特別是背景區(qū)域的效果更為明顯。由于將整幅圖像分割成了兩部分,增強(qiáng)時(shí)根據(jù)不同特點(diǎn)分別處理,互不影響,特別整體偏暗的背景區(qū)域得到了較大的亮度范圍擴(kuò)展。
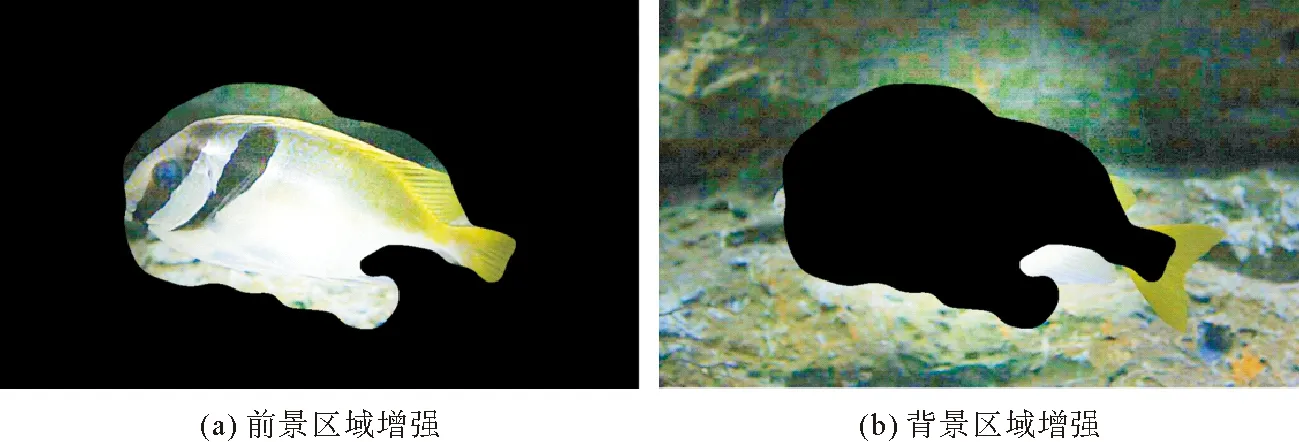
圖6 前景區(qū)域與背景區(qū)域增強(qiáng)結(jié)果
3 泊松融合
圖像的前景和背景區(qū)域分別增強(qiáng)后,區(qū)域間鄰接部分存在明顯差異,采用泊松融合算法實(shí)現(xiàn)區(qū)域間的融合。泊松圖像編輯[16]是通過泊松方程實(shí)現(xiàn)圖像間的融合,合成后的圖像內(nèi)容平滑、邊界一致。首先求取圖像梯度向量場(chǎng),然后對(duì)融合區(qū)域進(jìn)行引導(dǎo)性插值處理,進(jìn)而將區(qū)域間融合問題轉(zhuǎn)變成求函數(shù)的極值問題。其基本原理如下:
設(shè)二維圖像I上有一閉合子區(qū)域Ω,Ω的邊界為?Ω,定義Ω上的梯度向量場(chǎng)為V,f為I上的標(biāo)量函數(shù)。已知f在?Ω上的取值為f*,則f在Ω內(nèi)取V引導(dǎo)下的插值函數(shù),即求解極值問題:
(5)

(6)
對(duì)式(5)進(jìn)行有限差分離散化得:
(7)
式中,〈p,q〉是一對(duì)4連通相鄰像素點(diǎn),fp和fq分別為f在像素點(diǎn)p和q上的取值,Vpq為V中由p到q的向量。則式(7)的解滿足:
(8)
其中,|Np|表示p的四鄰域。
將待融合區(qū)域劃分成若干子區(qū)域,對(duì)于每個(gè)子區(qū)域由式(8)進(jìn)行求解,進(jìn)而得到融合區(qū)域的解,最后實(shí)現(xiàn)區(qū)域間的圖像融合。
4 實(shí)驗(yàn)與分析
實(shí)驗(yàn)數(shù)據(jù)集來源于網(wǎng)絡(luò)搜集的自然水域下非均勻光照?qǐng)D像。數(shù)據(jù)集包含40幅圖像,主要按場(chǎng)景(12幅)、光衰減性(18幅)和渾濁程度(10幅)分為三類,部分?jǐn)?shù)據(jù)集如表1所示。實(shí)驗(yàn)所用計(jì)算機(jī)的配置為CPU Intel(R)Core(TM)i5-6300HQ 2.30 GHz,RAM 8 GB。軟件平臺(tái)為MATLAB 2016b。針對(duì)上述數(shù)據(jù)集,通過實(shí)驗(yàn)驗(yàn)證提出增強(qiáng)方法的有效性,并與直方圖均衡化(histogram equalization, HE)算法和單尺度Retinex(single scale Retinex, SSR)算法[17]進(jìn)行了比較。
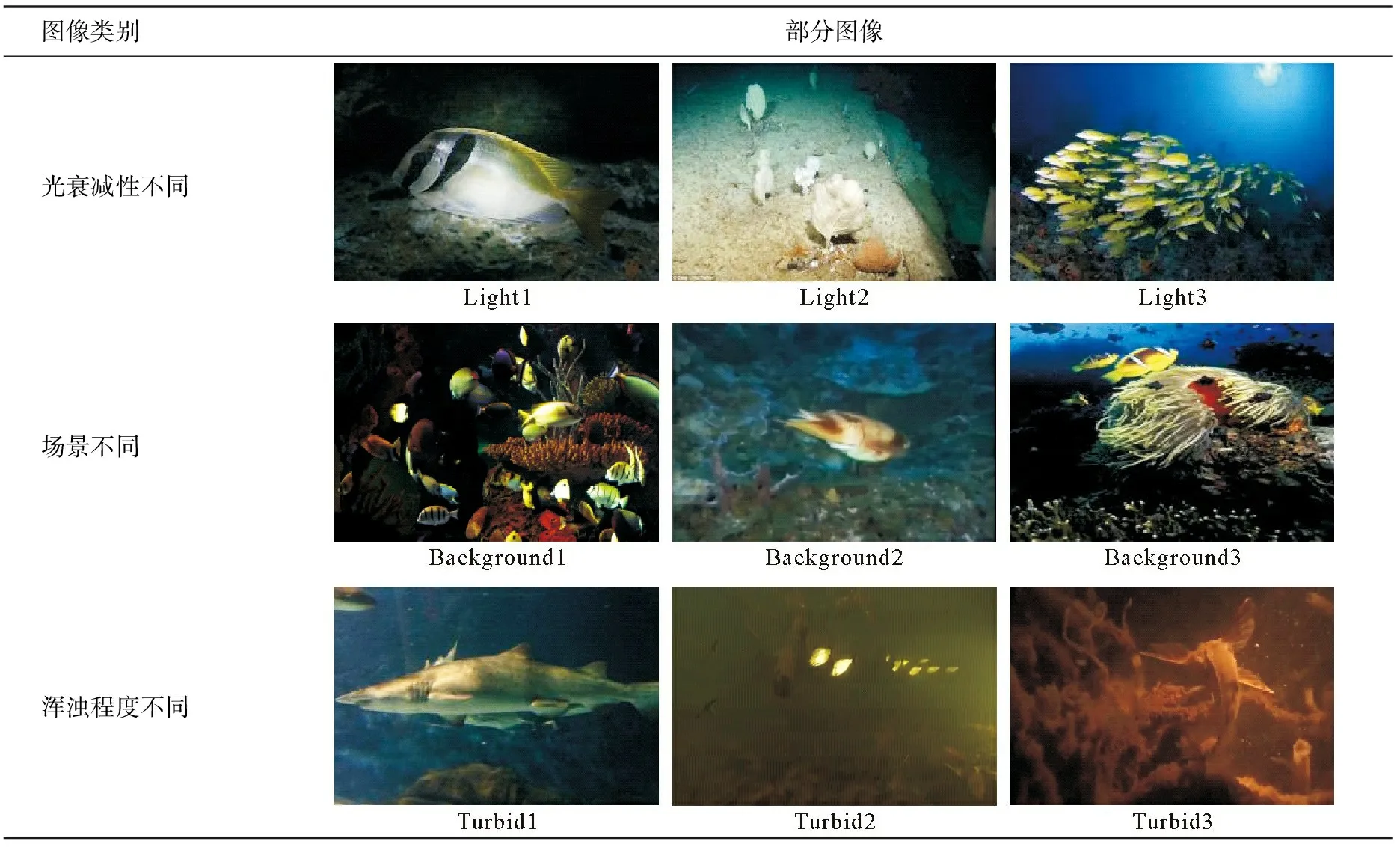
表1 實(shí)驗(yàn)數(shù)據(jù)集
4.1 增強(qiáng)效果主觀評(píng)價(jià)
選取數(shù)據(jù)集中3幅不同類型的圖像進(jìn)行增強(qiáng)算法的主觀評(píng)價(jià),圖像分別為L(zhǎng)ight1、Background1、Turbid1,實(shí)驗(yàn)結(jié)果如圖7所示,其中放大了增強(qiáng)后圖像的局部效果。
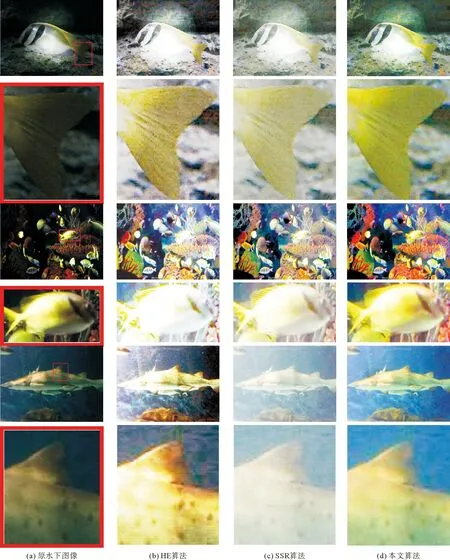
圖7 圖像增強(qiáng)效果對(duì)比
從圖7可以看出,3種算法對(duì)水下圖像都有一定的增強(qiáng)效果,其中小方框?yàn)榫植糠糯髤^(qū)域。HE算法增強(qiáng)處理后,圖像亮度有較大的提升,但沒有解決偏色問題,同時(shí)過度增強(qiáng)了前景區(qū)域(如Background1中的魚),且背景區(qū)域出現(xiàn)了明顯的噪音(如Light1中的魚尾和Turbid1中的魚鰭);SSR算法增強(qiáng)處理后,雖然提升了圖像的亮度,對(duì)顏色具有一定的校正作用,但細(xì)節(jié)紋理不清晰(如Turbid1中的魚鰭),且處理后的圖像具有泛白現(xiàn)象,較為模糊;本研究提出算法增強(qiáng)處理后,圖像中前景、背景區(qū)域細(xì)節(jié)清晰可見,且區(qū)域間自然融合,有效解決了色偏問題,改善了圖像的整體視覺效果。
4.2 增強(qiáng)效果客觀評(píng)價(jià)
為客觀評(píng)價(jià)不同增強(qiáng)算法性能,本節(jié)對(duì)比常用的圖像平均灰度值、標(biāo)準(zhǔn)差、信息熵三項(xiàng)統(tǒng)計(jì)指標(biāo)。平均灰度值指標(biāo)與圖像的亮度動(dòng)態(tài)變化相關(guān);標(biāo)準(zhǔn)差統(tǒng)計(jì)了像素值間的變化情況,其值越大對(duì)比度越大;信息熵是圖像中含有信息量的反映,表征圖像灰度分布的聚集特性,反映了圖像的清晰度。
利用上述的性能指標(biāo)分別對(duì)圖7中的三幅圖像增強(qiáng)前后效果評(píng)估,結(jié)果如表2所示。
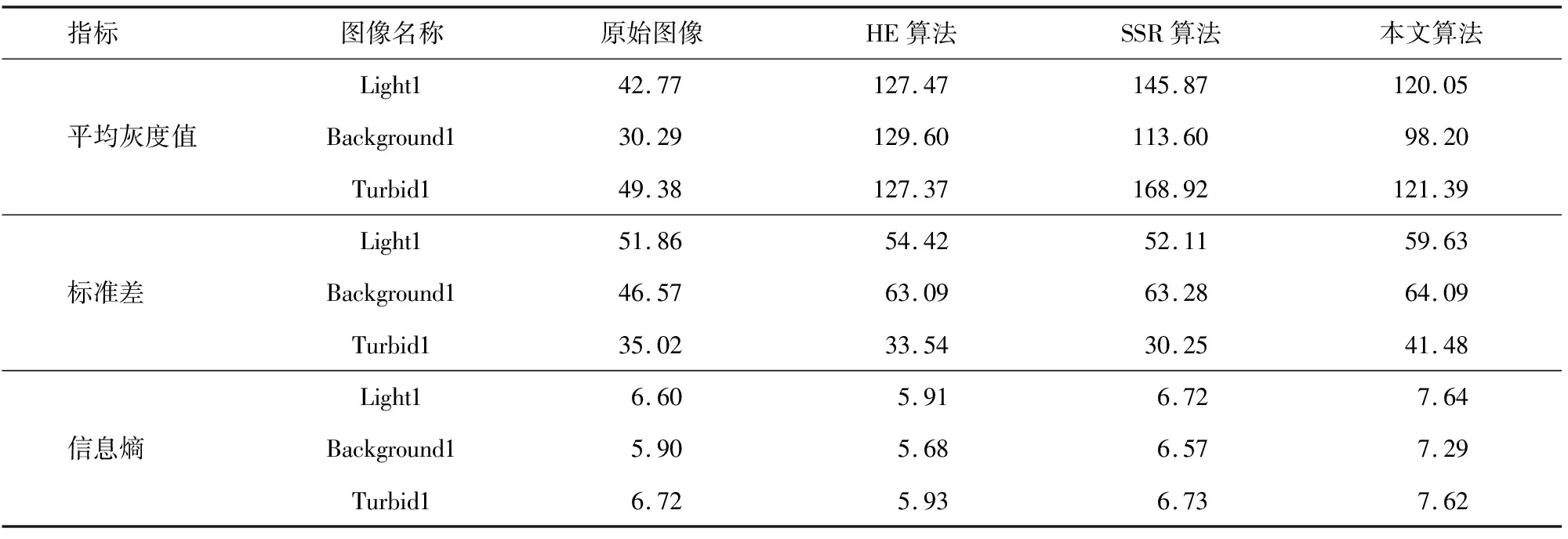
表2 圖像增強(qiáng)效果的客觀評(píng)價(jià)
從表2可以看出,由于水下圖像較暗,3種情況下增強(qiáng)后算法都提高了圖像的平均灰度值指標(biāo),使得整幅圖像亮度均值在一個(gè)合適范圍;在圖像的標(biāo)準(zhǔn)差方面,HE算法和SSR算法對(duì)于不同的圖像增強(qiáng)后標(biāo)準(zhǔn)差變化不穩(wěn)定,存在降低圖像對(duì)比度現(xiàn)象(如Turbid1),本文提出算法表現(xiàn)了更好的性能;增強(qiáng)后,HE算法降低了三幅圖像的信息熵,SSR算法略有提高,本算法的效果更佳,明顯地增強(qiáng)了圖像清晰度。
表3 圖像增強(qiáng)效果的客觀評(píng)價(jià)
Tab.3 Objective evaluation of image enhancement effects %

指標(biāo)平均提高百分比HE算法SSR算法本文算法平均灰度值251.18267.73190.21標(biāo)準(zhǔn)差23.4223.7525.12信息熵-8.624.9617.71
為了評(píng)價(jià)算法的整體性能,分別對(duì)40幅非均勻光照水下圖像進(jìn)行實(shí)驗(yàn),并計(jì)算增強(qiáng)處理后性能指標(biāo)參數(shù)的平均提高百分比,結(jié)果如表3所示。
從表3可以看出,由于數(shù)據(jù)集中的非均勻光照水下圖像亮度一般整體偏暗,HE算法主要實(shí)現(xiàn)了一幅圖像中所有像素的亮度范圍均衡化,提高了圖像的對(duì)比度,由于存在灰度級(jí)合并現(xiàn)象,信息熵有所損失;SSR算法提高了水下數(shù)據(jù)集圖像的整體亮度和對(duì)比度,但圖像信息熵只是略有提升;本算法相比于其他兩種增強(qiáng)算法具有更好的性能,在增加圖像平均灰度值和標(biāo)準(zhǔn)差的同時(shí),較大地提高了圖像的信息熵。
5 結(jié)論
針對(duì)非均勻光照條件下的水下圖像特點(diǎn),利用GBVS視覺顯著性算法將水下圖像分割為前景區(qū)域與背景區(qū)域,并基于Retinex算法分別對(duì)兩部分進(jìn)行增強(qiáng),采用伽馬變換對(duì)背景區(qū)域進(jìn)行二次增強(qiáng),最后通過泊松融合算法將兩部分合成水下增強(qiáng)圖像。利用提出算法對(duì)多幅非均勻光照條件下的水下圖像進(jìn)行增強(qiáng),圖像質(zhì)量得到顯著提高,并與其他算法進(jìn)行了比較,表現(xiàn)出更好的性能。由于波長(zhǎng)較長(zhǎng)的紅光在水下比藍(lán)色和綠色的光更容易被吸收,考慮到紅色分量衰減造成的顏色失真,在今后的工作中嘗試進(jìn)行顏色補(bǔ)償。
猜你喜歡
汽車工程師(2021年12期)2022-01-17 02:29:54
建材發(fā)展導(dǎo)向(2021年6期)2021-06-09 05:57:08
現(xiàn)代國(guó)際關(guān)系(2021年2期)2021-04-13 01:59:16
當(dāng)代陜西(2020年14期)2021-01-08 09:30:42
中國(guó)外匯(2019年11期)2019-08-27 02:06:32
貴州師范學(xué)院學(xué)報(bào)(2016年4期)2016-12-01 03:54:07
太空探索(2016年10期)2016-07-10 12:07:01
中國(guó)科技博覽(2016年2期)2016-04-25 20:32:39
小學(xué)生導(dǎo)刊(2016年34期)2016-04-11 00:49:44
電測(cè)與儀表(2015年5期)2015-04-09 11:30:52