基于滑模控制的分?jǐn)?shù)階神經(jīng)網(wǎng)絡(luò)的準(zhǔn)一致同步性
2020-03-14 07:43:50陳茜瑤馬俊風(fēng)
陳茜瑤,張 海,馬俊風(fēng)
(安慶師范大學(xué)數(shù)學(xué)與計(jì)算科學(xué)學(xué)院,安徽安慶246133)
分?jǐn)?shù)階微積分是由分?jǐn)?shù)階導(dǎo)數(shù)和分?jǐn)?shù)階積分兩部分組成。分?jǐn)?shù)階微分系統(tǒng)是一個(gè)非常有前景的研究課題,動(dòng)力學(xué)分析、穩(wěn)定性分析及控制理論都已成為熱門的研究課題[1-7]。雖然經(jīng)典控制方法廣泛運(yùn)用于工業(yè)上,但是因非線性系統(tǒng)的控制性能和控制方法不完善,所以經(jīng)典控制方法并不理想,而滑模控制(SMC)可以保證具有不確定性的非線性系統(tǒng)的穩(wěn)定性和魯棒性[8-11]。文獻(xiàn)[12]推導(dǎo)出基于憶阻器的具有時(shí)滯的分?jǐn)?shù)階神經(jīng)網(wǎng)絡(luò)的準(zhǔn)一致同步性判據(jù)。文獻(xiàn)[13]根據(jù)分?jǐn)?shù)階Lyapunov穩(wěn)定性判據(jù)、線性矩陣不等式及Laplace變換,得出下列具有全/欠驅(qū)動(dòng)的分?jǐn)?shù)階神經(jīng)網(wǎng)絡(luò)基于滑模控制的同步性:

其中分?jǐn)?shù)階階數(shù)α ∈(0,1),對(duì)于非線性函數(shù)fj(xj(t)),n表示神經(jīng)網(wǎng)絡(luò)單元數(shù),bij是在第i神經(jīng)元中第j神經(jīng)元的常數(shù)連接權(quán)重,xi(t)是t時(shí)刻第i單元的狀態(tài),ai為當(dāng)?shù)趇神經(jīng)元與網(wǎng)絡(luò)未連接時(shí),重置其電位至靜態(tài)的速率,Ii為外部輸入。
受文獻(xiàn)[12-13]啟發(fā),本文利用分?jǐn)?shù)階微分方程、Volterra-integral等式和不等式技巧,討論基于滑模控制的分?jǐn)?shù)階神經(jīng)網(wǎng)絡(luò)的準(zhǔn)一致同步問(wèn)題,推廣了文獻(xiàn)[12-13]中的相應(yīng)結(jié)果。將(1)式作為驅(qū)動(dòng)系統(tǒng),令x(t)=[x1(t),x2(t),…,xn(t)]T,A=diag(a1,a2,…,an),I=[I1,I2,…,In]T,B=(bij)n×n,則驅(qū)動(dòng)系統(tǒng)(1)可表為

1 預(yù)備知識(shí)
為了更好地描述相關(guān)模型,這里給出相關(guān)重要的定義和引理。
定義1[2]對(duì)于函數(shù)f (t)∈C[[0,+∞),?],且α >0,則稱d-α的α階分?jǐn)?shù)階積分,其中Γ(α)=e-ttα-1dt。
定義2[2]對(duì)于在[0,+∞)上的所有n 階連續(xù)可微函數(shù)的集合函數(shù)f (t)∈Cn+1[[0,+∞),?],則Caputo型分?jǐn)?shù)階導(dǎo)數(shù)表示為其中α >0,n 為一個(gè)正整數(shù),且n-1<α <n,特別有,當(dāng)0 <α <1時(shí),有

引理1[7]如果f (t)∈Cn[0,∞),t ∈[0,T]且n-1<α <n,n ∈?+,則(i)d-αd-βf (t)=d-(α+β)f (t),α,β ≥0;(ii)dαd-βf (t)=f (t),α=β ≥0;(iii)d-αdβf (t)=f (t)-(0),α=β ≥0。
為了考慮分?jǐn)?shù)階神經(jīng)網(wǎng)絡(luò)的準(zhǔn)一致同步性,其響應(yīng)系統(tǒng)為

其中G為控制增益矩陣,且為未知的。

同步誤差為e(t)=x(t)-y(t),則誤差系統(tǒng)為定義3[12]對(duì)誤差系統(tǒng)(4),如果對(duì)?ε >0,存在兩個(gè)常數(shù)0 <δ <ε,T >0,當(dāng)‖ ‖e(t0) <δ 時(shí),有‖ ‖e(t) <ε,對(duì)?t ∈J=[t0,t0+T],其中t0為初始觀測(cè)時(shí)間,則稱分?jǐn)?shù)階神經(jīng)網(wǎng)絡(luò)的驅(qū)動(dòng)系統(tǒng)(2)和響應(yīng)系統(tǒng)(3)能實(shí)現(xiàn)準(zhǔn)一致同步。

引理3[15]若x ≥-1,0 <α <1,則(1+x)α≤1+αx。
引理4[16]令z(t),a(t)和h(t)為?+上的非負(fù)連續(xù)函數(shù),又令1≤p <∞為一實(shí)數(shù),若
假設(shè)(H1)函數(shù)fj(·)滿足Lipschitz條件,即對(duì)于所有的x,y ∈?,存在正標(biāo)量Fj,則

其中F=diag(F1,F2,…,Fn)。
2 主要結(jié)果
文獻(xiàn)[13]設(shè)計(jì)出一個(gè)新的分?jǐn)?shù)階滑模表面,定義為

其中H ∈?m×n和G ∈?n×m是兩個(gè)實(shí)矩陣,則HG為非奇異,K ∈?n×m為常數(shù)矩陣。
根據(jù)引理1可知,所提出的滑模表面(5)式的分?jǐn)?shù)階動(dòng)力學(xué)方程定義為

若f (x(t))和f (y(t))是預(yù)先已知的,并且令dασ(t)=0,則等價(jià)控制信號(hào)ueq為

則滑動(dòng)運(yùn)動(dòng)方程為

其中Ω=I-G(HG)-1H。
引理5[13]對(duì)于給定的Lipschitz常數(shù)l= ‖ ‖F(xiàn) ,如果存在一個(gè)正定的n×n增益矩陣E和一個(gè)m×n增益矩陣K,滿足

則動(dòng)力學(xué)方程(6)式是漸近穩(wěn)定的,且Λ=-PA-AP-PGK -KTGTP。
根據(jù)引理1,可得

通過(guò)對(duì)(8)式運(yùn)用假設(shè)(H1),可得

兩邊同時(shí)乘以e-t,得

其中V1=e-t‖φ ,V2‖=M。
根據(jù)引理4和(10)式可得
因此,結(jié)合(11)~(13)式有
所以,根據(jù)定義3可知,如果‖ φ ‖<δ,則‖ e(t) ‖<ε,即分?jǐn)?shù)階神經(jīng)網(wǎng)絡(luò)的驅(qū)動(dòng)系統(tǒng)(2)和響應(yīng)系統(tǒng)(3)將實(shí)現(xiàn)準(zhǔn)一致同步。
接下來(lái),討論分?jǐn)?shù)階滑模表面(5)式,K是矩陣不等式(7)的一個(gè)解,而分?jǐn)?shù)階滑模同步控制器為

時(shí),驅(qū)動(dòng)系統(tǒng)(2)和響應(yīng)系統(tǒng)(3)的準(zhǔn)一致同步問(wèn)題,其中K1>0為增益矩陣,‖ F^ (t) ‖是未知常數(shù)‖ F(t)‖的估算值,并且由分?jǐn)?shù)階自適應(yīng)率確定:dαl^(t)=ω1‖ HB ‖‖ e(t)‖|σi(t) |-ω1ω2l^(t),其中σ1,σ2為正設(shè)計(jì)參數(shù)。結(jié)合(4)式和(20)式,所得同步誤差系統(tǒng)為

根據(jù)(8)式和(9)式,同理可得

定理2 在假設(shè)(H1)和引理5的基礎(chǔ)上,若0 <α <1,且1+
上式兩邊同時(shí)乘以e-t,得

根據(jù)引理4,結(jié)合(12)式、(13)式和(15)式,可得
即
‖ e(t) ‖≤Z1et+υZ1eteZ2υt(1-e-Z2υt)= ‖ φ ‖+υ‖ φ ‖e(SA+SB)υt(1-e-(SA+SB)υt)=[1+υe(SA+SB)υt(1-e-(SA+SB)υt)]‖ φ ‖,故而,由定義3可知,若‖ φ ‖<δ,則‖ e(t) ‖<ε,即分?jǐn)?shù)階神經(jīng)網(wǎng)絡(luò)的驅(qū)動(dòng)系統(tǒng)(2)和響應(yīng)系統(tǒng)(3)將實(shí)現(xiàn)準(zhǔn)一致同步。
3 應(yīng)用舉例
為了驗(yàn)證所得定理的正確性以及可行性,現(xiàn)給出數(shù)值模擬。
例 討論以下作為驅(qū)動(dòng)系統(tǒng)的3維分?jǐn)?shù)階神經(jīng)網(wǎng)絡(luò)dαxi(t)=-aixi(t)+bijfj(xj(t)) +Ii,i=1,2,3,則矩陣形式為
圖1、圖2分別表示系統(tǒng)(16)和(17)、(16)和(18)之間的同步誤差系統(tǒng)的狀態(tài)軌跡,圖3、圖4分別表示系統(tǒng)(16)和(17)、(16)和(18)的同步誤差的模。
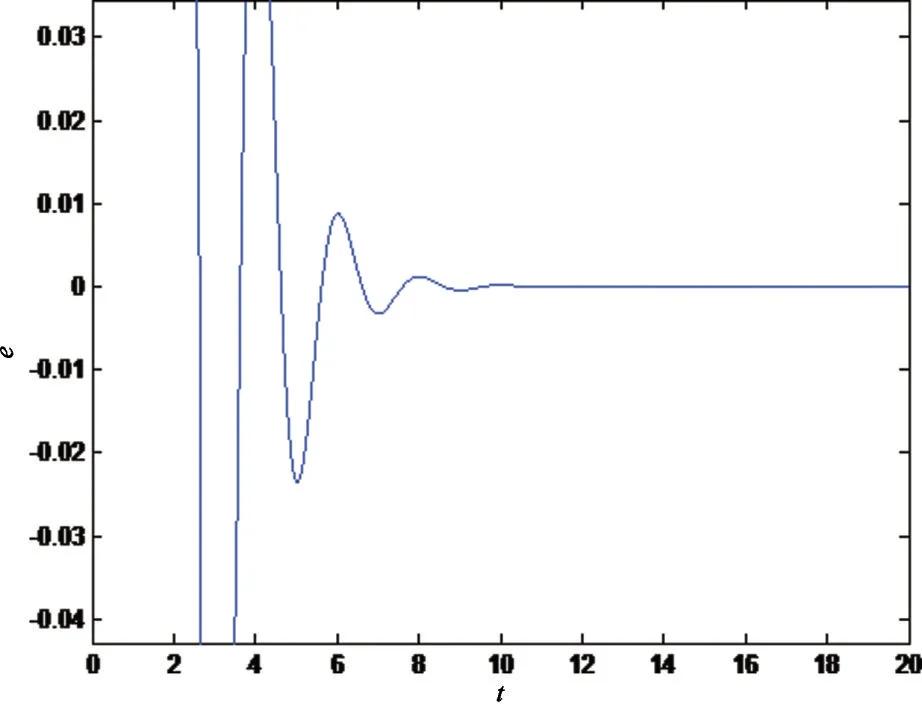
圖1 系統(tǒng)(16)和系統(tǒng)(17)同步誤差狀態(tài)軌跡
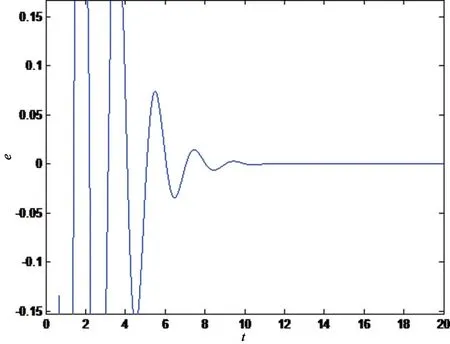
圖2 系統(tǒng)(16)和(18)同步誤差狀態(tài)軌跡
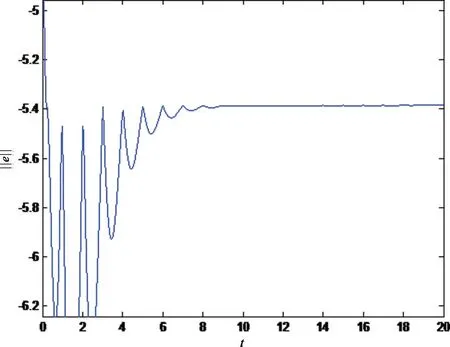
圖3 系統(tǒng)(16)和(17)的同步誤差的模
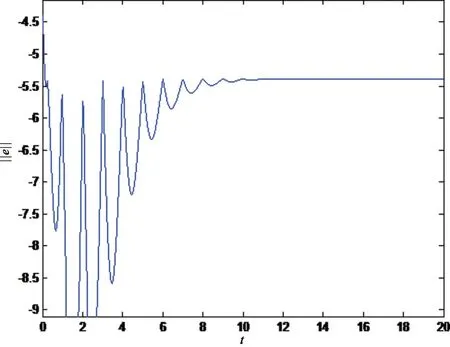
圖4 系統(tǒng)(16)和(18)的同步誤差的模
4 總 結(jié)
本文利用滑模控制策略、Volterra-integral等式和不等式技巧等,推導(dǎo)出分?jǐn)?shù)階神經(jīng)網(wǎng)路系統(tǒng)的準(zhǔn)一致同步性的充分性判據(jù),并推廣了先前工作,同時(shí)給出了仿真實(shí)例,以說(shuō)明所探討課題的可行性。接下來(lái)將進(jìn)一步探討基于滑模控制下的分?jǐn)?shù)階時(shí)滯神經(jīng)網(wǎng)絡(luò)的準(zhǔn)一直同步問(wèn)題、有限時(shí)間投影同步問(wèn)題及全局Mittag-Leffler同步問(wèn)題等。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
海峽姐妹(2020年9期)2021-01-04 01:35:44
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
VOGUE服飾與美容(2020年9期)2020-09-02 14:47:26
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
山東青年(2016年1期)2016-02-28 14:25:25
當(dāng)代修辭學(xué)(2014年3期)2014-01-21 02:30:44