車用質(zhì)子交換膜燃料電池空氣供應(yīng)系統(tǒng)自適應(yīng)解耦控制方法研究
2020-03-18 18:29:58周蘇,胡哲,2,謝非
汽車工程 2020年2期
關(guān)鍵詞:系統(tǒng)
周 蘇,胡 哲,2,謝 非
(1.同濟(jì)大學(xué)汽車學(xué)院,上海 201804; 2.上海重塑能源科技有限公司,上海 201804)
前言
空氣供應(yīng)系統(tǒng)控制技術(shù)一直是車用質(zhì)子交換膜燃料電池(PEMFC)系統(tǒng)的研究熱點(diǎn)。空氣供應(yīng)系統(tǒng)的控制一方面要保證進(jìn)入電堆的空氣狀態(tài)(流量、壓力、溫度、濕度等)滿足設(shè)計性能指標(biāo)要求,另一方面必須具有一定的魯棒性和抗干擾能力。與氫氣供應(yīng)系統(tǒng)相比,空氣供應(yīng)系統(tǒng)對控制指標(biāo)的要求更高,控制難度更大。
近年來國內(nèi)外的學(xué)者在PEMFC空氣供應(yīng)系統(tǒng)控制方面進(jìn)行了大量的研究工作,針對空氣流量與壓力的控制,學(xué)者們提出了許多控制策略。Pukrushpan等[1]提出了一種前饋 反饋相結(jié)合的最優(yōu)控制方法用于過氧保護(hù),并在相應(yīng)的系統(tǒng)模型上進(jìn)行了仿真驗(yàn)證。Xiong等[2-3]構(gòu)建了一種描述PEMFC陰極空氣流動動態(tài)特性的非線性模型,并基于該模型設(shè)計了狀態(tài)反饋控制器,實(shí)現(xiàn)了空氣流量與壓力的協(xié)調(diào)控制。Vahidi等[4]提出了基于模型預(yù)測的控制方法,可用于解決在功率需求突然增加時氧氣供應(yīng)不足的問題。Rodatz等[5]設(shè)計了線性二次型控制器,并基于動態(tài)模型,實(shí)現(xiàn)了空氣流量和壓力的解耦控制。張?zhí)熨R等[6]通過仿真研究比較了3種空氣壓力優(yōu)化控制方案(即PID控制、滑模控制和模糊PID控制),發(fā)現(xiàn)模糊PID控制的效果最好。李奇等[7]利用多目標(biāo)自適應(yīng)粒子群智能優(yōu)化算法提出了相應(yīng)的H∞魯棒控制方法,仿真結(jié)果表明該方法能有效控制入堆空氣壓力,較傳統(tǒng)PID和線性最優(yōu)二次型控制更優(yōu)。陳鳳祥等[8]針對空氣流量與壓力強(qiáng)耦合的特性,應(yīng)用內(nèi)膜解耦控制原理設(shè)計了一種解耦控制器,仿真結(jié)果顯示該控制器比傳統(tǒng)PID解耦控制器在系統(tǒng)模型失配的情況下具有更好的魯棒性。
隨著對PEMFC空氣供應(yīng)系統(tǒng)控制算法的深入研究,越來越多的控制方法被證明可有效應(yīng)用于實(shí)際的系統(tǒng)中,前饋補(bǔ)償解耦閉環(huán)控制就是其中之一[9]。本文中針對空壓機(jī)在長期運(yùn)行后存在的性能衰減或靜態(tài)特性發(fā)生變化的問題,提出了一種前饋補(bǔ)償解耦與自適應(yīng)查表相結(jié)合的空壓機(jī)轉(zhuǎn)速閉環(huán)控制方法。
1 控制方法設(shè)計
1.1 空氣供應(yīng)系統(tǒng)
車用PEMFC空氣供應(yīng)系統(tǒng)為電推提供適宜條件的空氣流,以保證電堆電化學(xué)反應(yīng)持續(xù)正常進(jìn)行。一般空氣供應(yīng)系統(tǒng)主要由空氣濾清器、空壓機(jī)、中冷器、增濕器、節(jié)氣門和連接管道等組成,其拓?fù)浣Y(jié)構(gòu)如圖1所示。
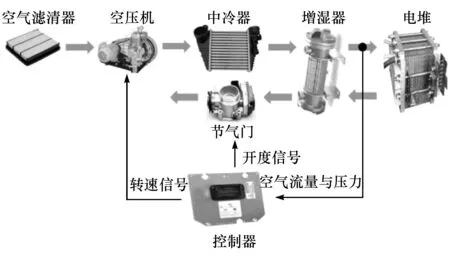
圖1 空氣供應(yīng)系統(tǒng)拓?fù)浣Y(jié)構(gòu)圖
在空氣供應(yīng)控制系統(tǒng)中,空壓機(jī)和節(jié)氣門為可操縱的執(zhí)行器。選取空壓機(jī)的轉(zhuǎn)速n和節(jié)氣門的開度θ為控制變量(輸入量),入堆空氣流量和入堆空氣壓力p為輸出量(或被控變量),則空氣供應(yīng)系統(tǒng)可簡化為一個非線性的兩輸入兩輸出系統(tǒng),其映若令控制變量u1=n,u2=θ,相應(yīng)控制器的任務(wù)就是實(shí)現(xiàn)合適的控制使輸出量在各種干擾情況下穩(wěn)準(zhǔn)快地趨近輸出量設(shè)定值(期望值),即
1.2 前饋補(bǔ)償解耦閉環(huán)控制算法
空氣供應(yīng)系統(tǒng)中入堆空氣流量m·和入堆空氣壓力p之間具有較強(qiáng)的耦合性,傳統(tǒng)的PID控制難以有效解決壓力與流量之間的相互影響,控制效果較差[10]。文獻(xiàn)[9]中提出了一種前饋補(bǔ)償解耦閉環(huán)控制算法,較好地解決了上述問題,其算法結(jié)構(gòu)如圖2所示。
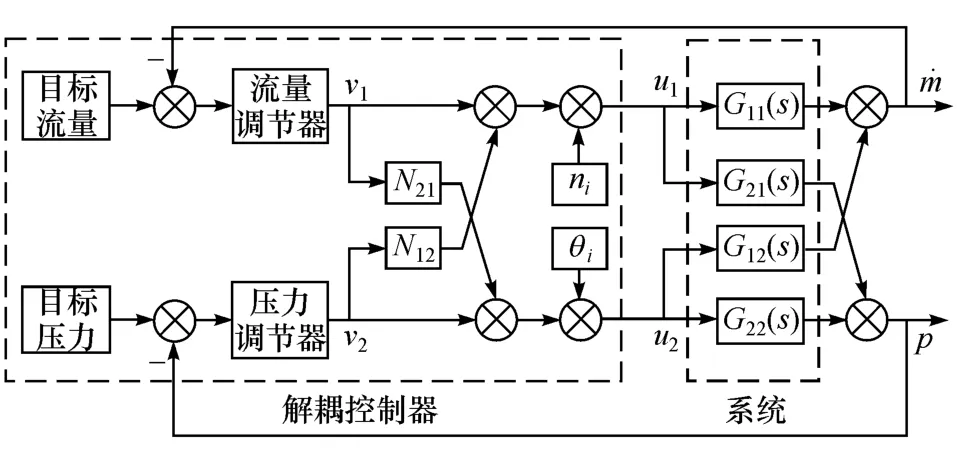
圖2 前饋補(bǔ)償解耦閉環(huán)控制算法結(jié)構(gòu)框圖
在圖2的結(jié)構(gòu)中,為使入堆空氣流量和壓力解耦,前饋解耦系數(shù)N21和N12應(yīng)滿足如下關(guān)系:

如上所述,空氣供應(yīng)系統(tǒng)是一個典型的非線性系統(tǒng),因此,為了得到上述被控的傳遞函數(shù)G11(s)、G12(s)、G21(s)和G22(s),須進(jìn)行分段線性化處理,即在每一個平 衡點(diǎn)[(nbase(i),θbase(i));(m·(i),p(i)),i=1,…,N]附近區(qū)域?qū)⑾到y(tǒng)視為局部線性系統(tǒng),并通過系統(tǒng)辨識實(shí)驗(yàn)確定各平衡點(diǎn)處的解耦系數(shù)N21和N12。平衡點(diǎn)處(nbase(i),θbase(i))的取值取決于空壓機(jī)特性和電堆空氣流動阻力特性,通常根據(jù)實(shí)驗(yàn)數(shù)據(jù)標(biāo)定獲得,可相對于設(shè)定電流Iset(i)的一維查表形式表示,即

文獻(xiàn)[9]中的研究結(jié)果表明,提出的解耦閉環(huán)控制算法取得了良好的實(shí)際控制效果,但式(2)標(biāo)定表的取值對實(shí)際控制效果的影響也至關(guān)重要。就空壓機(jī)的轉(zhuǎn)速標(biāo)定表而言,其本質(zhì)是表征了空壓機(jī)的真實(shí)靜態(tài)特性。若空壓機(jī)性能發(fā)生衰減或靜態(tài)特性發(fā)生變化,則會出現(xiàn)以下兩個問題:
(1)靜態(tài)前饋所起作用下降,PI反饋?zhàn)饔迷黾樱諌簷C(jī)響應(yīng)變慢,流量跟隨能力變差,在電流增加量較大時可能會導(dǎo)致入堆空氣過量系數(shù)瞬時偏低而影響電堆使用壽命;
(2)PI調(diào)節(jié)器的調(diào)節(jié)量達(dá)到積分飽和,無法進(jìn)一步消除目標(biāo)流量與實(shí)際流量之間的偏差,導(dǎo)致整個PEMFC系統(tǒng)無法輸出需求電功率。
為了克服以上問題,需要對文獻(xiàn)[9]中提出的解耦閉環(huán)控制算法中空壓機(jī)的轉(zhuǎn)速nbase(i)和/或節(jié)氣門的開度θbase(i)對應(yīng)的標(biāo)定表進(jìn)行更新。重新標(biāo)定不失為一種可行的措施,但耗時且需停車實(shí)施。為此,提出了一種自適應(yīng)查表前饋控制算法,用于實(shí)現(xiàn)在線修正空壓機(jī)轉(zhuǎn)速標(biāo)定表的功能,從而改善前饋補(bǔ)償解耦閉環(huán)控制算法在空壓機(jī)性能發(fā)生衰減或靜態(tài)特性發(fā)生變化時的控制效果。
1.3 自適應(yīng)查表前饋控制算法
查表法是一種實(shí)用的工程方法,以表格(或表格集)的形式建立從設(shè)定點(diǎn)到控制量之間的映射關(guān)系。給定不同的節(jié)點(diǎn),通過離線測量分別得到不同節(jié)點(diǎn)對應(yīng)的控制量并形成表格(或表格集),各節(jié)點(diǎn)間的點(diǎn)所對應(yīng)的控制量可以通過數(shù)學(xué)差值方法得到。式(2)中用于靜態(tài)前饋的空壓機(jī)轉(zhuǎn)速標(biāo)定表如表1所示。

表1 空壓機(jī)轉(zhuǎn)速一維表格查表
當(dāng)電流設(shè)定值滿足Iset(k)≤Iset(t)<Iset(k+1)時,采用線性差值法,相應(yīng)的控制變量nbase(t)可表示為
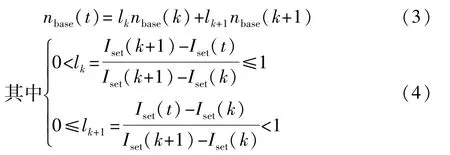
式中:k為節(jié)點(diǎn)位置;lk和lk+1為加權(quán)因數(shù)。
本文中僅以空壓機(jī)轉(zhuǎn)速標(biāo)定表為例進(jìn)行自適應(yīng)更新,其控制原理如圖3所示。

圖3 自適應(yīng)查表前饋控制框圖
自適應(yīng)算法由兩部分構(gòu)成,一是自適應(yīng)算法觸發(fā)判定模塊,二是自適應(yīng)算法修正模塊。當(dāng)空壓機(jī)性能發(fā)生衰減或同批次空壓機(jī)之間性能不一致時,PEMFC系統(tǒng)各平衡點(diǎn)處的空壓機(jī)轉(zhuǎn)速將偏離原始的標(biāo)定值,即nbase發(fā)生了偏離,此時為了達(dá)到同樣的控制目標(biāo),PI輸出量nadder的穩(wěn)態(tài)值nadder(∞)可能偏大。這一方面導(dǎo)致空壓機(jī)響應(yīng)速度變慢,另一方面會引起PI積分飽和,無法跟隨控制目標(biāo)。所以,觸發(fā)自適應(yīng)修正模塊的第一個條件是:PI輸出量nadder達(dá)到了觸發(fā)上下限(nadder,up和nadder,down),即

系統(tǒng)在升/降載的動態(tài)過程中PI輸出量nadder也可能會觸發(fā)上下限,但是,標(biāo)定表不允許在動態(tài)過程中處于不斷的修正更新狀態(tài)。因此,觸發(fā)自適應(yīng)修正模塊的第二個條件是:系統(tǒng)穩(wěn)態(tài)或空氣流量穩(wěn)態(tài)并保持了一定的時長tss,即




對于任意方程Ax=b,根據(jù)Moore-Penrose偽逆矩陣A+=AT(AAT)-1,有唯一的最小二乘解x*=A+b。因此,可以得到式(9)的解:
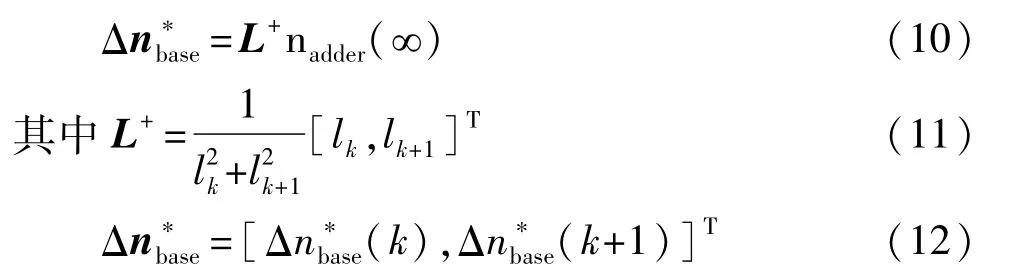
式中:L+為L的偽逆矩陣,L=[lk,lk+1]為權(quán)重向量;為節(jié)點(diǎn)k和k+1處的轉(zhuǎn)速修正量。

2 HIL仿真驗(yàn)證
2.1 HIL仿真平臺搭建
燃料電池控制器(FCU)的HIL仿真平臺采用dSPACE系統(tǒng)設(shè)備,系統(tǒng)架構(gòu)如圖4所示。其中,實(shí)時處理器采用新一代的SCALEXIO實(shí)時處理單元(主頻3.8 GHz,4個內(nèi)核),能夠處理大量信號,非常適用于運(yùn)行高性能要求的應(yīng)用程序。實(shí)時處理器中運(yùn)行的是自建的某款30 kW級PEMFC系統(tǒng)動態(tài)模型(包括了電堆模型、空氣供應(yīng)系統(tǒng)模型、氫氣供應(yīng)系統(tǒng)模型和冷卻系統(tǒng)模型4個模塊)。FCU在接收到上位機(jī)的功率請求指令和實(shí)時處理器發(fā)出的模型狀態(tài)參數(shù)信號后,對其進(jìn)行信息綜合處理(控制策略運(yùn)算),輸出相應(yīng)的控制指令至系統(tǒng)的各個執(zhí)行器。FCU的發(fā)送指令周期設(shè)為10 ms,系統(tǒng)采樣周期為0.1 s。HIL仿真平臺實(shí)物圖如圖5所示。
2.2 結(jié)果與討論
自適應(yīng)查表前饋控制算法中的參數(shù)設(shè)定如下:nadder,up=50 r/min,nadder,down=-50 r/min=600 L/min2,tss=1 s。測試工況選用兩周期的階躍變載工況,時長為565 s,如圖6所示。
設(shè)定燃料電池系統(tǒng)的怠速電流為114 A,空壓機(jī)初始轉(zhuǎn)速標(biāo)定表從114 A開始,如表2所示。
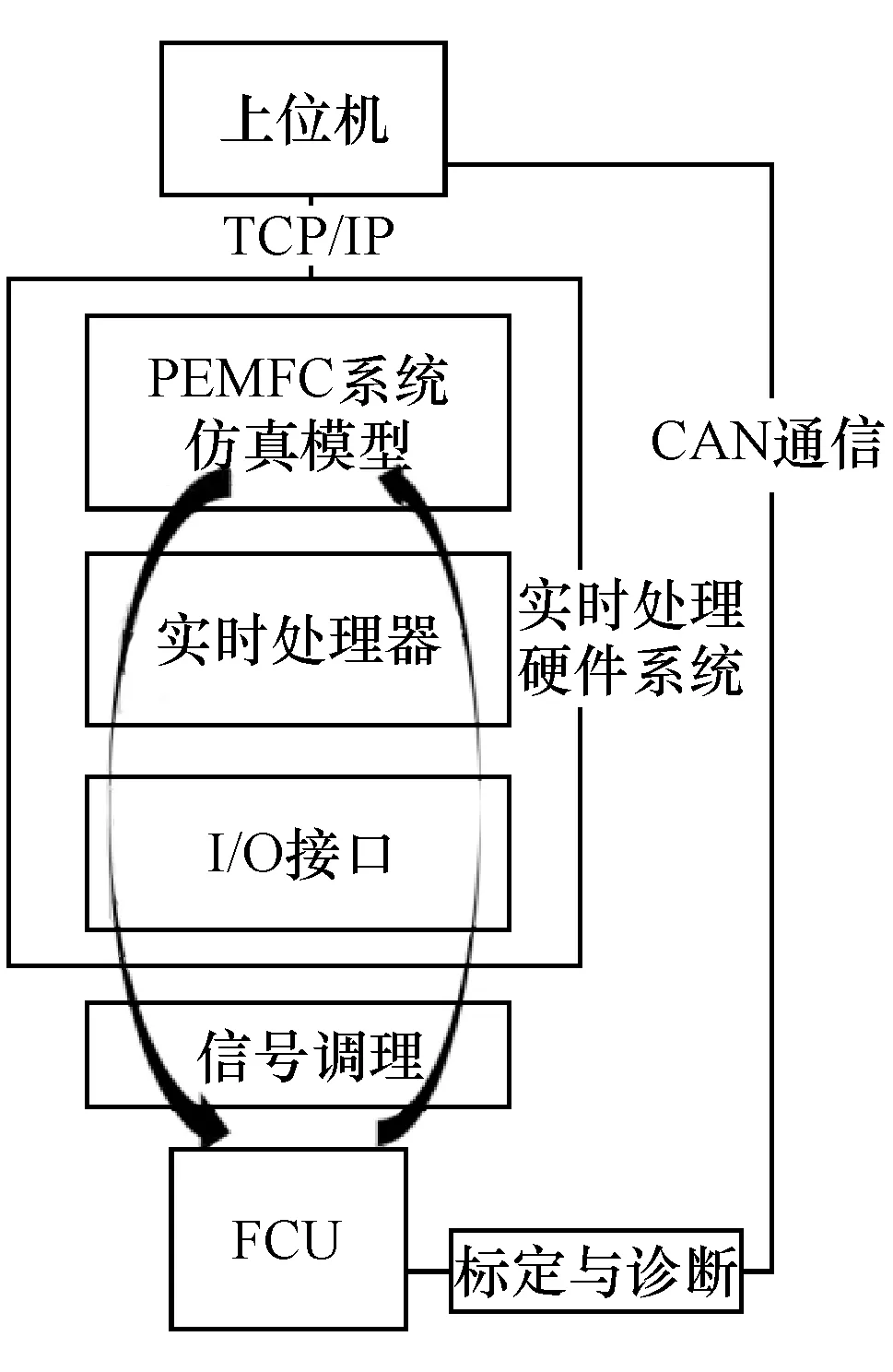
圖4 HIL系統(tǒng)架構(gòu)圖

圖5 HIL臺架實(shí)物圖
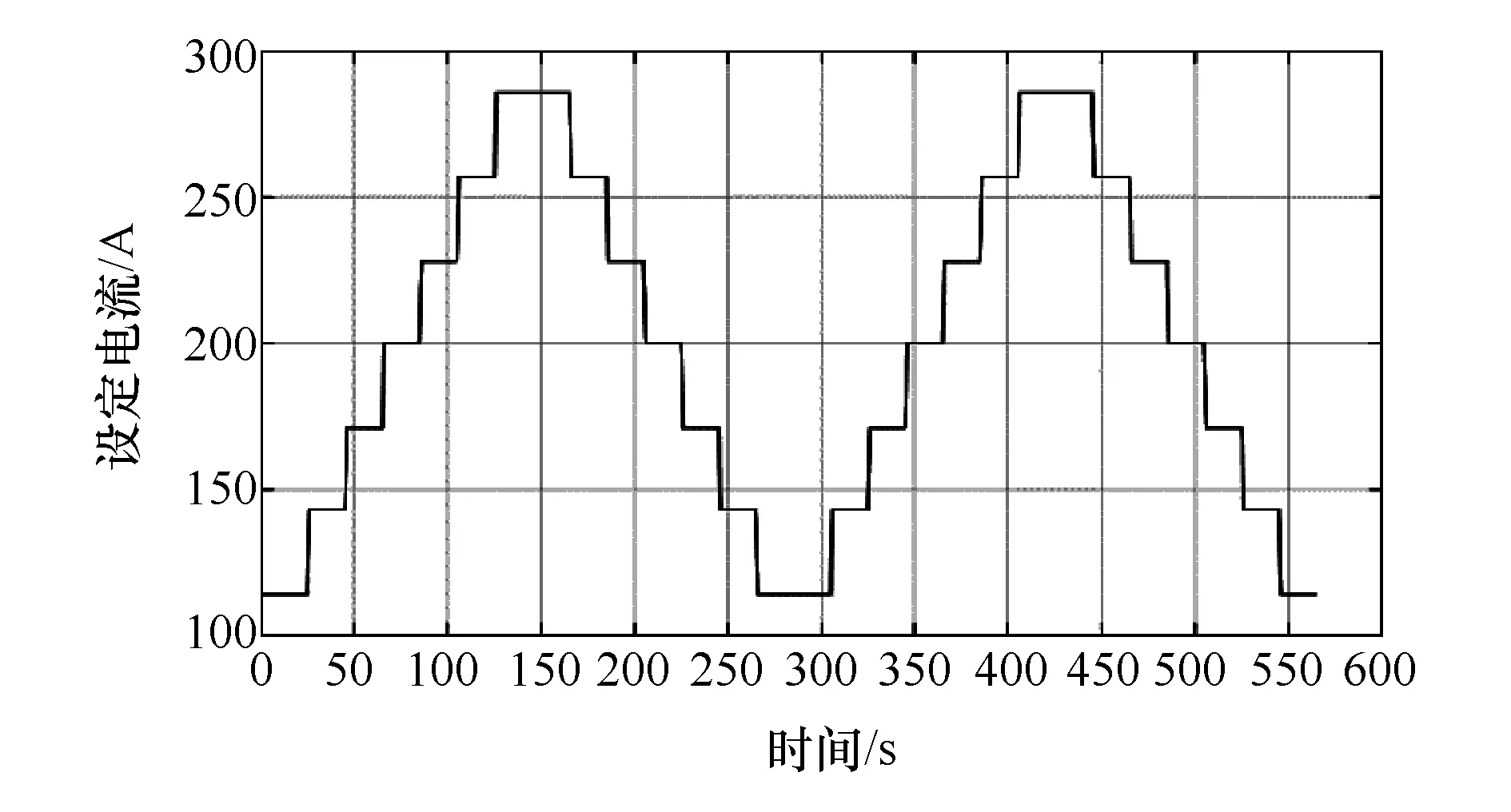
圖6 測試工況

表2 原始空壓機(jī)轉(zhuǎn)速標(biāo)定表
空壓機(jī)長時間運(yùn)行后其性能會出現(xiàn)一定的衰減,為模擬該情形考慮將空壓機(jī)流量特性MAP圖乘以某個系數(shù)。實(shí)驗(yàn)中系數(shù)設(shè)為0.9,用于模擬空壓機(jī)性能衰減10%的情形,運(yùn)用自適應(yīng)查表算法得到的HIL仿真測試結(jié)果如圖7和圖8所示。
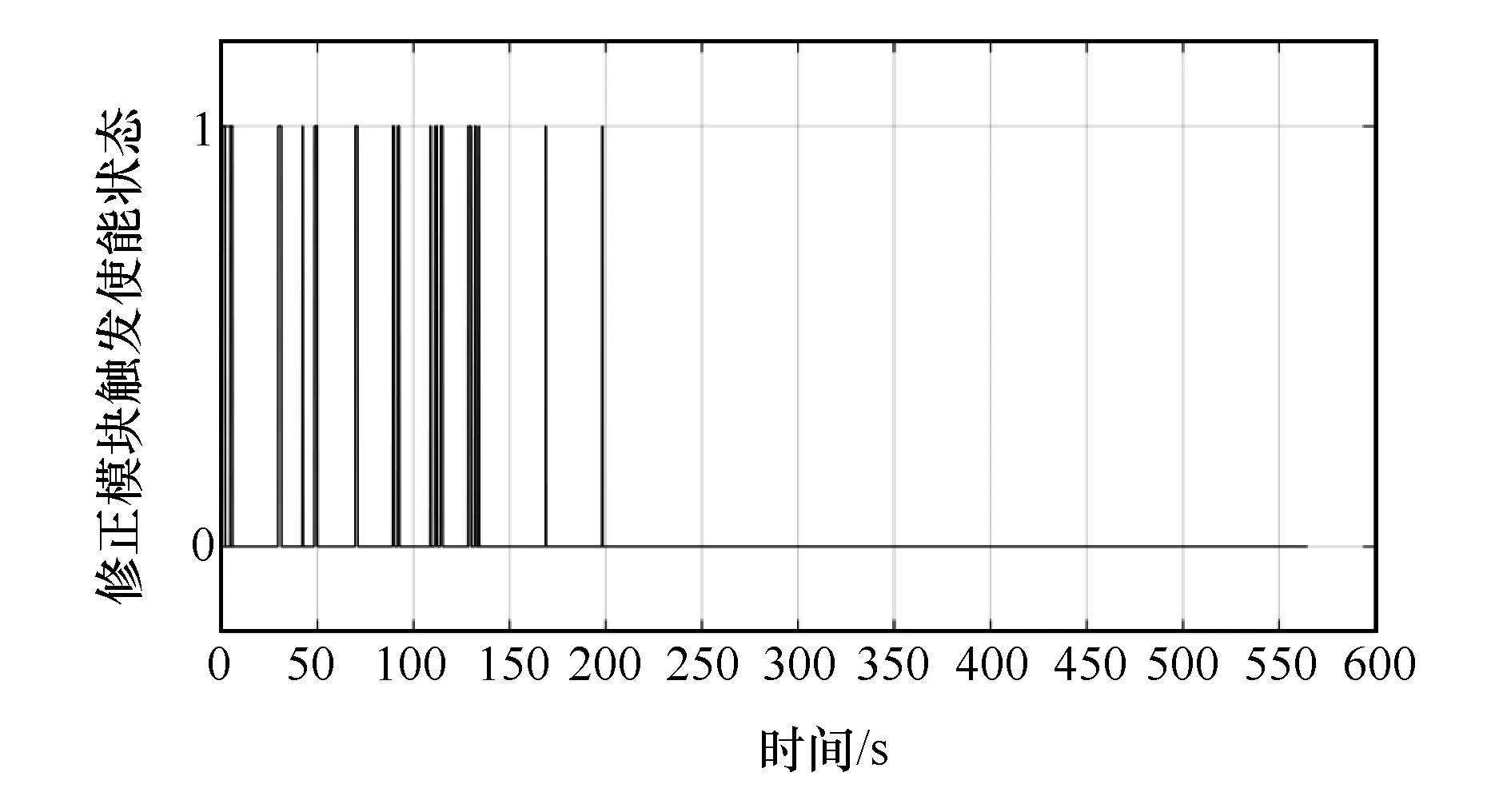
圖7 修正模塊觸發(fā)使能狀態(tài)
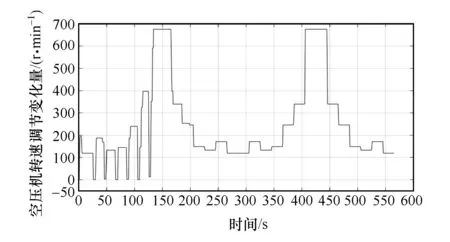
圖8 空壓機(jī)轉(zhuǎn)速調(diào)節(jié)變化量
圖7為實(shí)驗(yàn)過程中修正模塊觸發(fā)使能狀態(tài)的變化,圖8為相應(yīng)的空壓機(jī)轉(zhuǎn)速調(diào)節(jié)變化量。可以看出,當(dāng)空壓機(jī)性能發(fā)生衰減時,其自身的工作特性與程序中的原始空壓機(jī)轉(zhuǎn)速標(biāo)定表2不能正確匹配。在第一個階躍變載循環(huán)工況中,自適應(yīng)程序中的修正模塊頻繁地被激活,該電流下的空壓機(jī)轉(zhuǎn)速標(biāo)定值被頻繁更新。在第二個階躍變載循環(huán)工況中,使能狀態(tài)一直保持在flag=0,說明此時空壓機(jī)轉(zhuǎn)速標(biāo)定表已經(jīng)更新完成,Δnbase不再發(fā)生變化,如表3所示。將表2與表3的對應(yīng)節(jié)點(diǎn)求和,即得到更新后的空壓機(jī)轉(zhuǎn)速標(biāo)定表,如表4所示。

表3 更新的空壓機(jī)轉(zhuǎn)速標(biāo)定表變化量

表4 更新后的空壓機(jī)轉(zhuǎn)速標(biāo)定表
從表3和表4可知,當(dāng)空壓機(jī)性能發(fā)生衰減后,初始的空壓機(jī)轉(zhuǎn)速標(biāo)定值偏低,自適應(yīng)查表控制算法可在線更新轉(zhuǎn)速標(biāo)定值,使其更符合空壓機(jī)實(shí)際的靜態(tài)特性。圖9給出了圖6所示工況下開啟自適應(yīng)算法后PI輸出量的變化曲線。
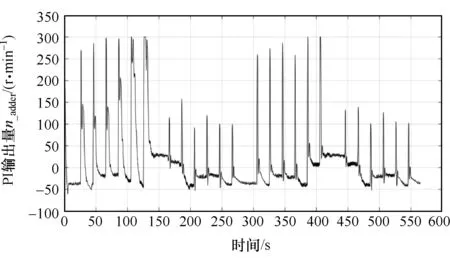
圖9 開啟自適應(yīng)算法后PI輸出量
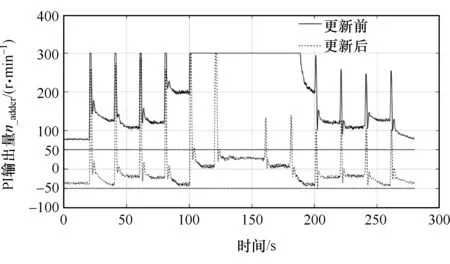
圖10 自適應(yīng)更新前、后的PI輸出量對比
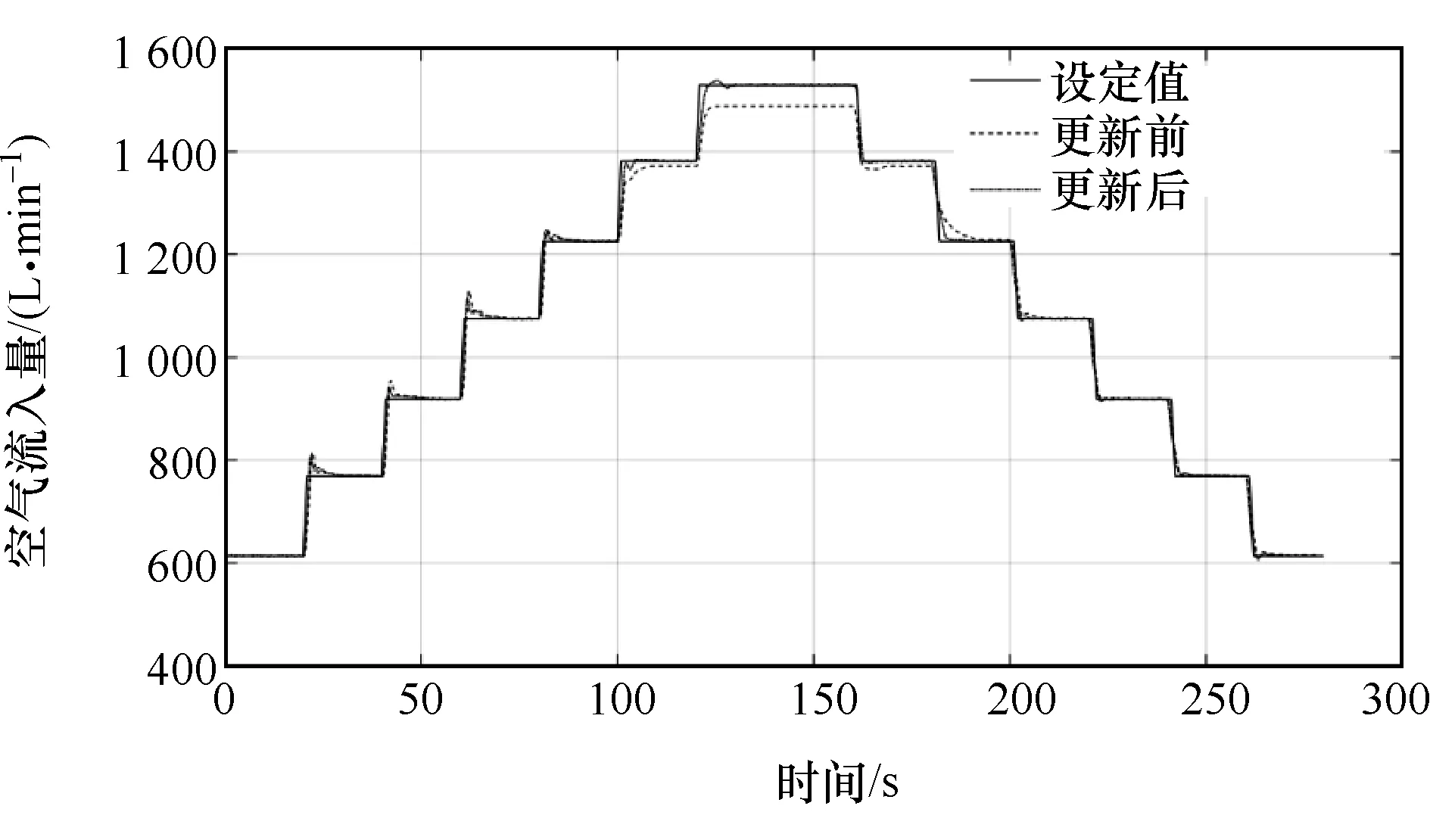
圖11 自適應(yīng)更新前、后的空氣入堆流量對比
為了進(jìn)一步比較自適應(yīng)查表算法對空氣入堆流量控制效果的影響,取圖6測試工況的后一個周期作為試驗(yàn)工況,將表2中空壓機(jī)轉(zhuǎn)速標(biāo)定值乘以0.9,用于模擬空壓機(jī)性能衰減10%的情形,進(jìn)行不開啟自適應(yīng)算法的實(shí)驗(yàn),并與前文自適應(yīng)更新后的實(shí)驗(yàn)結(jié)果進(jìn)行對比。
圖10為自適應(yīng)更新前、后的PI輸出量對比,圖11為自適應(yīng)更新前、后的空氣入堆流量對比。可以看出,自適應(yīng)更新前,由于空壓機(jī)性能的衰減導(dǎo)致原始的空壓機(jī)轉(zhuǎn)速標(biāo)定值偏低,為了滿足此時空氣入堆流量和壓力的要求,PI輸出量nadder必須增大,使空壓機(jī)轉(zhuǎn)速增加。當(dāng)需求功率較大時(如設(shè)定電流為257和286 A),圖10中PI輸出量nadder達(dá)到了PI調(diào)節(jié)器的積分上限300 r/min并保持不變,即發(fā)生了積分飽和現(xiàn)象,此時空壓機(jī)轉(zhuǎn)速無法進(jìn)一步增加,導(dǎo)致實(shí)際的空氣入堆流量低于目標(biāo)流量,如圖11的100~180 s時間區(qū)間所示。此時,一方面電堆無法輸出需求功率,另一方面電堆會因?yàn)檫^氧比過低、氫空壓差過大等故障而影響壽命,F(xiàn)CU會檢測出該故障而報錯停機(jī)。開啟自適應(yīng)查表程序后,隨著空壓機(jī)轉(zhuǎn)速標(biāo)定表的更新,PI輸出量nadder會逐漸向0靠近,并最終保持在-50~50 r/min的范圍內(nèi)。自適應(yīng)更新后的轉(zhuǎn)速標(biāo)定表與空壓機(jī)工作特性正確匹配,可有效避免積分飽和現(xiàn)象的發(fā)生,實(shí)際的空氣入堆流量可快速地跟隨目標(biāo)流量設(shè)定值,且靜態(tài)誤差幾乎為零,響應(yīng)時間更短,超調(diào)量更小。
3 結(jié)論
在空壓機(jī)性能發(fā)生衰減或靜特性發(fā)生變化時,基于前饋補(bǔ)償解耦閉環(huán)控制算法的燃料電池空氣供應(yīng)系統(tǒng)其控制品質(zhì)會變差,出現(xiàn)空壓機(jī)響應(yīng)變慢、空氣流量跟隨能力變差、甚至PI調(diào)節(jié)器積分飽和等現(xiàn)象,導(dǎo)致燃料電池系統(tǒng)無法輸出所需電功率。針對這個問題,提出了自適應(yīng)查表法,對前饋補(bǔ)償解耦閉環(huán)控制算法進(jìn)行了改進(jìn),并在HIL仿真平臺上進(jìn)行了驗(yàn)證。結(jié)果表明,改進(jìn)后的算法可實(shí)現(xiàn)在線自適應(yīng)修正空壓機(jī)轉(zhuǎn)速標(biāo)定表,有效避免PI調(diào)節(jié)器積分飽和,使得空壓機(jī)的響應(yīng)速度更快,入堆空氣流量的控制效果更好。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟(jì)·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
