極區航海用慣性導航系統綜述
2020-03-19 03:57:12趙玉新奔粵陽
導航定位與授時 2020年2期
趙玉新,奔粵陽,李 倩
(哈爾濱工程大學自動化學院,哈爾濱 150001)
0 引言
極區對于我國的重要性主要體現在以下幾點:首先,北極地區石油和天然氣資源非常豐富,據權威統計,全球待發現的石油和天然氣資源25%分布在北極地區[1-2],從北極地區獲得油氣資源有利于我國能源供應的多樣化,緩解進口油氣資源所帶來的戰略壓力;再有,從地緣分布上來說,北極連接美國、英國、俄羅斯等國家,其戰略地位極其重要;另外,北極航道具有巨大的商業價值[3],北極地區的冰層逐步融化將為人類呈現東北航線與西北航線2條戰略通道,有利于我國的對外貿易。面對極區日益提升的戰略價值以及對我國的重要意義,極區的航海、科考等活動正逐步增多。
無論是船舶極區航行、工程作業還是科考活動都離不開導航設備的支持[4-5]。一來船舶基于導航設備測量并解算出其運動參數來確保船舶的安全,再者船舶的探測系統和工程裝備的運行也離不開導航系統的支持[6]。現有的極區導航手段主要是衛星導航和慣性導航。但是由于極區上空衛星分布較少,同時太陽風暴、磁暴和電離層暴頻繁[7-8],衛星信號易受到影響,甚至無法正常工作。而慣性導航系統不需要接收外界信號也不輻射信號就可以完成導航工作,是全自主導航設備,也是現代船舶實現極區導航能力的重要途徑[9-10]。
在極區,采用常規當地水平固定指北機械編排時,無論是平臺式還是捷聯式慣性導航系統都存在難以精確定位定向的問題。文中概述了常用于解決極區導航問題的幾種慣性導航系統機械編排,包括:自由方位、游移方位、格網及橫坐標機械編排,并對這幾種機械編排的優缺點進行了總結。在文章結尾,展望了極區航海用慣性導航系統未來的發展方向。
1 常規機械編排在極區導航所面臨的問題
目前,航海用慣性導航系統通常把地理坐標系作為導航坐標系。對平臺式慣性導航系統來說,導航坐標系的y軸要始終跟蹤地理北向[11],當船舶在極點周圍區域航行時,由于經線快速收斂,導航系將繞z軸以高速率旋轉(如圖1所示)。按照圖1中近極點軌跡航行,導航坐標系y軸會很快變化180°。在極限情況下——直接穿越極點時,旋轉速率將會變得無窮大,機械式的實體陀螺穩定平臺難以實現準確跟蹤[12-13]。
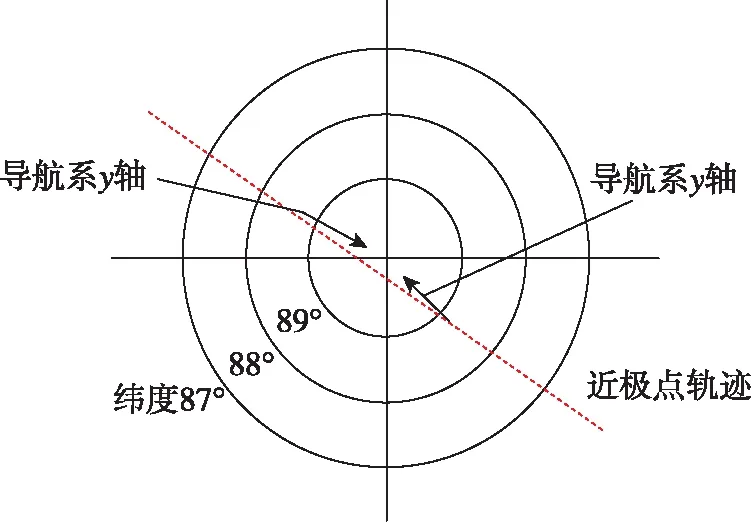
圖1 通過極點時真北向的變化Fig.1 Orientation of true north at geography pole
對于捷聯式慣性導航系統,導航坐標系相對地球的旋轉角速度可表示為
(1)
其中,VN表示北向速度,VE表示東向速度,R表示地球半徑,從式(1)中可以看出,當緯度L趨于90°時,導航系相對地球的角速度中第三項出現奇點,無法進行捷聯解算[14-16]。
從上述分析可見,平臺式和捷聯式兩種類型的慣性導航系統在極區采用當地水平固定指北機械編排時,經線快速收斂都會使得地理北向難以跟蹤和計算。因此,把地理坐標系作為導航參考系不再適用,為解決該問題,國內外學者設計了多種類型的極區慣性導航機械編排并應用于慣性導航系統中。
2 極區慣性導航發展現狀
2.1 國外極區慣性導航發展現狀
20世紀中葉,國外便對極區慣性導航系統開展了相關的研發工作。1958年,美國在“鸚鵡螺”號核潛艇上配備了Mark19與Mark23兩型陀螺羅經,潛艇駛入北極進行了巡航,其中Mark19采用了游動方位機械編排,Mark23采用了自由方位機械編排。當潛艇駛入北極以后,2個陀螺羅經的精度均有所下降,并在緯度升高到88°后失去導航的能力,無法正常工作,在地理極點附近不工作范圍為11.9*1.7miles的橢圓[17-18]。文獻[19]報道了客機安裝的美國LTN-72R型導航系統采用的是游動方位機械編排,但是并沒有對極區導航精確性的相關闡述。文獻[20-21]中介紹了俄羅斯研制的一款慣性羅經系統Vega-M,Vega-M的工作范圍為南北緯85°以內,在80°~85°范圍內,其航向誤差比低于80°的情形會增大1倍。2003年,Vega-M搭載破冰船到達北緯89°地區(其航行路線如圖2所示)。試驗結果表明:在超出北緯85°時,航向誤差會明顯增大。俄羅斯I-42激光陀螺捷聯式慣性導航系統也采用了游動方位機械編排,可以在緯度≤82°的區域內進行定位定向。從以上兩種機械編排的工程應用來看:比較當地水平固定指北機械編排,它們無需對地理北向進行跟蹤和計算,但其精度會隨緯度升高而降低,在地理極點附近無法工作。
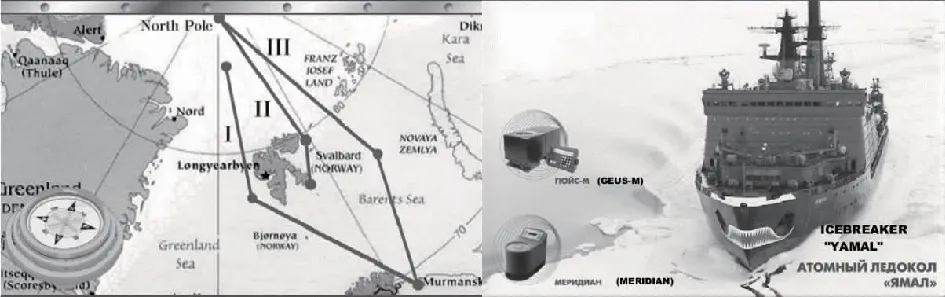
圖2 Vega-M搭載破冰船北極航行[22]Fig.2 Routes of icebreaker Yamal with Vega-M
不同于游動和自由方位的概念,K.C.Maclure于1941年在其論文Polar navigation中首次提出了格網導航的概念[23]。1945年5月,白羊座Aries I號采用格網航向+陀螺儀的導航方法完成了極區的導航任務,從那時起格網導航被廣泛應用。在1954年10月,英國皇家空軍飛行學院的飛機 Aries IV也采用格網導航方法飛越了地理北極[24]。據報道,美國在魟魚號和薩哥號核潛艇上裝備的N6A(MK1)型平臺式慣性導航系統極區模式也采用了格網導航。
除了格網導航之外,橫坐標系下慣性導航[25]概念的提出也為解決極區導航問題提供了途徑。麻省理工學院(Massachusetts Institute of Technolo-gy,MIT)在慣性導航類專著Inertial Navigation System中率先提出了橫坐標系下的慣性導航,這種方法將極軸設在赤道平面內,可以解決極區導航的問題[26-28]。美國的Honeywell公司在其專利[29]中把地球看作是一個理想球體,給出了橫地理經緯度和原始經緯度之間的轉換關系,為當時的極區慣性導航研究提供了新的路徑。根據報道,美國及北約海軍現役水面船舶和潛艇的標配設備——MK49雙軸旋轉調制式慣性導航系統采用了橫坐標機械編排。20世紀90年代,MK49旋轉調制式慣性導航系統搭載英國海軍HMS TIRELESS潛艇開展了13天的極區性能測試工作,測試結果顯示,借助于橫坐標機械編排和雙軸旋轉調制技術,MK49在極區的導航誤差未出現增大的情況,其系統精度滿足設計指標要求。
2.2 國內極區慣性導航發展現狀
國外極區慣性導航系統目前較為成熟,已經形成了型號裝備并成功應用[30-31]。而國內慣性導航系統發展起步晚,現役航海類慣性導航設備均采用當地水平固定指北方位機械編排,即采用地理坐標系作為導航坐標系,在極區存在不可導航區域。在2010年后,為了契合我國對于極區科考和極區商業運輸等方面的需求,我國極區慣性導航系統以及相應的機械編排都得到了快速發展,其發展方向主要集中于格網慣性導航系統和橫坐標系慣性導航系統。哈爾濱工程大學在2010年開始進行極區慣性導航機械編排的研究工作,2013年在國內首次申請了有關于極區慣性導航的發明專利,并給出了常規模式與極區橫向導航模式之間的轉換方法。同年,西北工業大學基于WGS-84地球幾何模型,推導了格網系下的慣性導航機械編排,并通過仿真分析給出了格網慣性導航誤差規律同常規機械編排的關聯性,同時驗證了格網導航應用于極區的有效性[32-34]。2014年,哈爾濱工程大學基于地球圓球模型,研究了橫向坐標系下的慣性導航算法,并提出了相應的誤差抑制技術,有效減小了航海用慣性導航系統的振蕩誤差項[35-37]。同年,東南大學基于參考旋轉橢球幾何模型,設計了橫坐標系力學編排,并給出了一套進入和駛出極區的模式切換邏輯,該邏輯判斷可避免由導航誤差引起的極區模式和常規模式之間的頻繁切換[38]。2015年,中船重工707所研究了格網系下的誤差傳播規律,并對高緯度下的格網航向誤差表達式進行了詳細的數學推導,闡明了其保精度工作的機理[39]。2016年,哈爾濱工業大學設計了格網系下的極區慣性/重力梯度儀組合導航濾波器,并利用蒙特卡羅仿真手段進行了精度分析[40]。2017年,解放軍信息工程大學針對旋轉式激光陀螺慣性導航系統設計了極區格網慣性導航算法,并分析了在格網系下單軸旋轉調制系統的誤差傳播特性[41]。
在極區慣性導航系統方面,中航工業618所和航天科工33所將研究重點放在格網慣性導航系統上;而哈爾濱工程大學和中船重工707所將研究重點放在橫坐標慣性導航系統上。目前,兩類極區慣性導航系統都已工程化并開展了極區航行試驗,從哈爾濱工程大學光纖羅經設備及其所采用的橫坐標慣性導航機械編排在極區試驗的效果看,橫坐標慣性導航機械編排在北極和南極高緯度地區可以滿足極區航海導航的需求,已具備工程實用化的條件。
3 極區慣性導航典型機械編排
已有的極區慣性導航機械編排主要有自由方位機械編排、游動方位機械編排、格網機械編排和橫坐標機械編排。下面將概述它們的工作原理,其中自由方位和游動方位導航系統的原理及其機械編排類似,因此將它們歸為一節來闡述。
3.1 自由方位和游動方位慣性導航系統
1)自由方位導航慣性導航系統
在自由方位慣性導航系統中,平臺坐標系相對慣性空間旋轉角速度在平臺坐標系z軸上的投影為0,即
(2)
其中,i表示慣性坐標系,n表示平臺坐標系,由上可知平臺坐標系繞其z軸無旋轉,這樣就不需要對方位軸陀螺施加力矩,克服了平臺在方位上跟蹤地理北向時施矩困難的問題,但平臺坐標系yn軸與地理坐標系yt軸不再重合,存在著一定的夾角,通常稱為自由方位角α,如圖3所示。

圖3 自由方位慣性導航系統平臺坐標系Fig.3 Navigation frame of free-frame inertial navigation system

綜合以上分析可知:自由方位慣性導航系統中不需要對方位陀螺儀施加力矩,也就解決了常規指北慣性導航系統在施矩方面遇到的困難。但是在地理極點處,地理北向(即地理坐標系yt軸的指向)缺失,此時無法得到相對于北向定義的自由方位角,因此無法在地理極點附近使用這種方案。由此可見,這種方法并沒有從根本上解決極區導航的問題。
2)游動方位導航慣性導航系統
與自由方位慣性導航系統相似,在游動方位導航系統[42]中,平臺坐標系相對地理坐標系的角速度在平臺坐標系的投影的z軸分量為0,即
(3)
對于游動方位慣性導航系統來說,實體陀螺穩定平臺的方位軸不跟蹤地理北向,其yn軸與北向的夾角不為0,而是一個隨時間變化的游動方位角α,如圖4所示。從工作原理上來看,游動方位和自由慣性導航系統屬于一類,它們的工作原理也相似。游動方位慣性導航系統和自由方位慣性導航系統類似,游動方位角在極點處面臨失去北向基準進而無法定義的問題,即游動方位慣性導航系統也無法在極點附近使用。
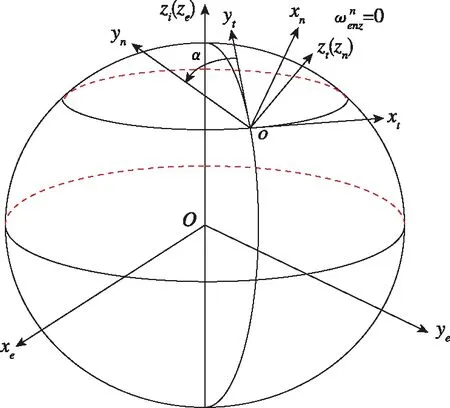
圖4 游動方位慣性導航系統平臺坐標系Fig.4 Navigation frame of wander azimuth inertial navigation system
3.2 格網慣性導航系統
格網導航的原理是把0°經線即本初子午線作為格網北向基準線,并作平行于該基準線的一系列平行線(被稱為格林威治格網線),這些平行線被繪制在海圖上,作為慣性導航系統的航向參考基準[43](如圖5所示),這樣,導航系統在極區避免了相對地理北向基準定向困難的問題。
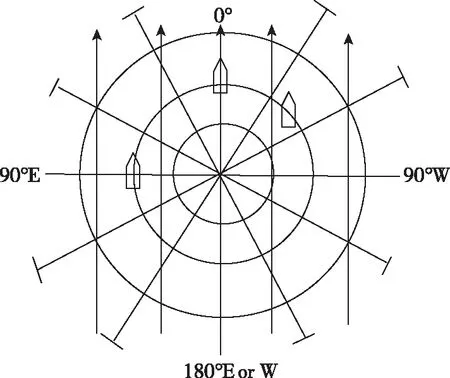
圖5 格網覆蓋圖Fig.5 The chart of grid navigation

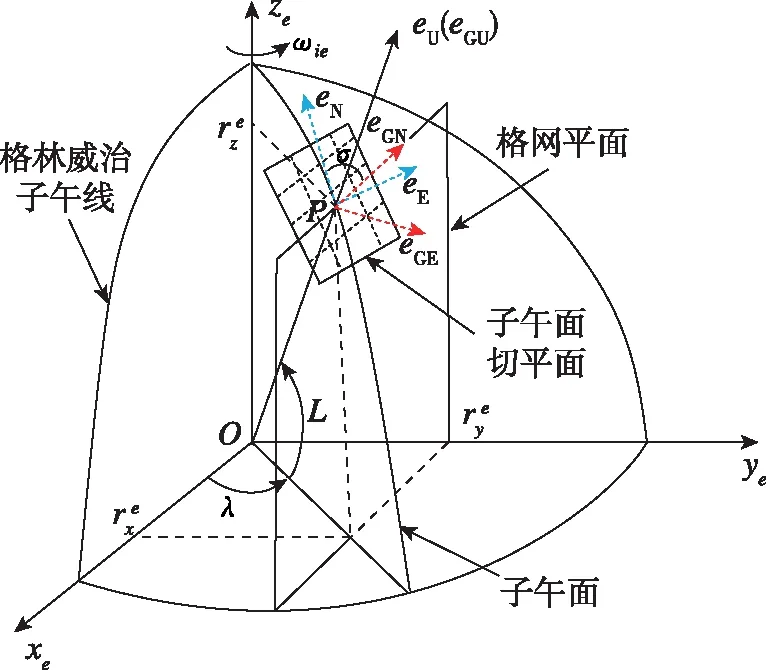
圖6 格網慣性導航系統的格網坐標系Fig.6 Grid frame of grid inertial navigation system


圖7 格網慣性導航系統原理框圖Fig.7 Mechanization of grid inertial navigation system
通過對格網機械編排分析可以看出:由于格網角σ仍以地理北向(地理坐標系yt軸的指向)作基準,所以其在極點處的定義已失去意義。再有,將解算得到的ECEF下坐標(x,y,z)轉換到地理緯度、經度、高度(L,λ,h)的公式如式(4)所示
(4)
3.3 橫坐標慣性導航系統
在橫坐標系慣性導航系統中,將極軸設在赤道平面,繪制橫經線圈和橫緯線圈,進一步構建橫坐標系慣性導航相關參量,解決極區因經線快速收斂導致的無北向基準的問題。


圖8 橫地球坐標系Fig.8 Transverse earth coordinate system

圖9 橫地理坐標系Fig.9 Transverse geographic frame


圖10 橫坐標慣性導航系統機械編排Fig.10 Mechanization of transverse frame strapdown INS
綜上所述,針對現有極區導航機械編排均的優缺點總結如表1所示。

表1 極區導航機械編排優缺點Tab.1 the mechanization features of polar navigation
4 未來極區慣性導航的研究展望
極區慣性導航系統在國外已成功應用。美國現役的MK49旋轉調制式慣性導航系統借助于橫坐標機械編排和雙軸旋轉調制技術,極區性能指標與中低緯度相比無下降。在國內,極區慣性導航系統機械編排研究主要集中于格網慣性導航和橫坐標慣性導航,近期已對這兩種類型極區慣性導航系統機械編排開展了實船設備的極區航行試驗測試并取得了良好的效果。展望未來,極區航海用慣性導航系統將朝著下述3個方向發展。
1)極區PNT中的慣性導航技術
極區綜合定位、導航、授時(Positioning,Navigation,Timing,PNT)系統作為全球PNT的重要組成部分,為全船用戶提供定位、導航、授時基準[49-51]。在極區PNT體系結構的4個層級中,慣性導航系統屬于信息感知層和信息融合層中的核心設備。在極區導航參考框架下,慣性導航系統的故障診斷及監測報警技術、多信息融合技術[52-56]均是研究的重點。此外,慣性導航信息在信息交互層需要與其他傳感器信息進行協同、互相校準與交互,所以還需考慮其通用性和兼容性。
2)極區慣性導航模擬與測試技術
極區物理場特性(包括重力場、地球自轉角速度矢量、電磁環境、氣象環境等)與中低緯度地區差異明顯,而我國不屬于高緯度國家,開展實船航行試驗經濟和政治成本較高。分析極區特殊物理場對慣性導航系統的性能與可靠性影響機理,研究極區慣性導航系統的模擬測試技術,建立導航設備極地性能的綜合評價體系顯得尤為重要。
3)極區慣性導航系統關鍵技術
極區地球自轉角速度矢量與重力矢量幾乎是共線的,導致慣性導航系統難以完成自對準。近年,基于偽地球坐標系的機械編排[57-59]以及基于地球坐標系的法向量機械編排[62-63]被提出,為極區自對準提供了新思路。船舶進入極區時,機械編排需要由常規模式轉換至極區模式,以往采用地球橢球模型時橫向轉換復雜,難以實現。針對該問題基于虛擬圓球模型的橫向極區導航方法被提出[60-61],為模式轉換研究開辟了新路徑。此外,為了滿足船舶長航時和高精度導航的需求,還需要進一步研究極區導航的誤差抑制技術,包括極區阻尼技術、綜合校正技術和旋轉調制技術[64-65]。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
電腦報(2020年35期)2020-09-17 13:25:53
當代工人(2020年8期)2020-05-25 09:07:38
裝備制造技術(2019年12期)2019-12-25 03:06:46
電腦報(2019年40期)2019-09-10 07:22:44
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
家庭影院技術(2017年9期)2017-09-26 03:41:45
