運載火箭電動伺服機構前饋自抗擾控制方法的設計
2020-03-19 04:22:58胡翔宇曾凡銓崔業兵
導航定位與授時 2020年2期
胡翔宇,于 戈,曾凡銓,崔業兵
(上海航天控制技術研究所,上海 201109)
0 引言
永磁同步電機(Permanent Magnet Synchro-nous Motor,PMSM)因具有功率范圍寬、效率高、低速大扭矩、使用維護方便及靜音性等多種優點,在航空航天等伺服系統領域應用廣泛,特別是在新一代運載火箭中已更多地開始采用PMSM作為電動伺服機構的驅動電機。航天用伺服機構一般為位置閉環系統,PMSM作為驅動系統的被控對象,通常采用電流環、速度環和位置環三環,并在每環加入相應的控制策略來實現伺服機構的位置閉環控制。控制策略一般采用傳統的PID控制算法,而在輸入信號為正弦波且伴隨有力矩干擾的情況下,僅靠PID控制策略較難同時滿足系統的剛度和跟蹤精度需求。針對PMSM的控制難點,目前已經有自適應控制[1]、非線性PID控制[2]、滑模變結構控制[3]和模糊神經網絡控制[4]等多種先進控制策略應用于調速系統中。以上方法雖然對外界擾動有抑制作用,但是都有各自的局限性。滑模變結構控制的固有抖動問題是實際應用中的難點,自適應控制和模糊神經網絡控制對處理器(Micro Controller Unit,MCU)的性能要求較高,因此均難以運用在運載火箭的伺服產品上。
近年來,研究人員提出了一種工程應用性較強的非線性控制方法——自抗擾控制(Active Distur-bance Rejection Control,ADRC)[5-9],該控制策略通過擴張狀態觀測器(Extended State Observer,ESO)統一觀測系統外部干擾和系統內部參數變化引起的干擾并加以補償,具有較好的動態和靜態特性,目前已經廣泛應用于各領域的伺服系統中。在ADRC的基礎上,采用非線性誤差反饋的方法,如有限時間比例(Finite Time Proportional,FTP)的控制策略,均可以提高伺服系統的剛度,具有較強的抗擾能力[10-13]。
關于自抗擾設計的大多數文獻主要研究的是系統的階躍響應,在實際應用過程中,如果指令是正弦輸入信號,位置反饋對指令的跟隨會有較大的誤差。通過對控制理論的分析發現,如果輸入信號是時變的,那么建模時對輸入的近似過程將產生誤差,而且產生的誤差無法通過ESO進行觀測和補償,導致系統的跟蹤誤差變大。考慮到微分具有預測誤差變化趨勢的作用,通過引入輸入微分前饋可以減小建模誤差,提高系統的跟蹤精度。文獻[14-15]研究了一種改進型的自抗擾控制器,即在速度環中加入了輸入微分前饋環節,而運載火箭用伺服機構是位置跟隨性伺服,速度環加入輸入微分前饋對位置閉環的跟蹤精度影響較小。
針對運載火箭伺服機構對抗擾性能和位置跟蹤性能均有較高要求的情況,本文在位置輸入為正弦信號的前提下,比較了系統在FTP+ESO控制方式下有無位置輸入微分前饋(Proportion Integra-tion Differentiation Feedback,PIDF)的跟蹤性能,同時對系統的動態特性也進行了分析。仿真和實驗結果均表明,在ADRC中引入PIDF不僅可有效提高系統對時變輸入信號的跟蹤精度,還可以提升系統的動態特性。
1 PMSM的自抗擾控制器設計
1.1 位置環的數學模型
永磁同步電機的機械運動方程為

(1)
1.2 擴張狀態觀測器設計
位置環采用擴張狀態觀測器時,其輸出的倒數趨近于無窮大,不滿足要求的穩定性條件,因此位置環不適宜使用擴張狀態觀測器;電流環加入擴張狀態觀測器對系統性能影響較小,因此電流環也不適宜使用擴張狀態觀測器。故本文將在速度環中使用擴張狀態觀測器。

(2)
式中,ws為角速度的基準值。令

選取電機轉速w作為狀態變量x1,擾動a(t)作為擴張狀態變量x2,則狀態方程變為
(3)
相對應地,簡化二階線性擴張狀態觀測器為
(4)
由此得到ESO的結構框圖如圖1所示。

圖1 ESO結構框圖Fig.1 ESO structure block diagram
1.3 誤差反饋控制律設計
將跟蹤誤差定義為θerr=θ-θf,其狀態方程為
(5)
其中,狀態變量x2需由z1代替,得到
(6)
希望跟蹤誤差按式(7)所示的規律進行衰減
(7)
其中,k為控制器的比例系數,用于控制誤差的衰減快慢。非線性函數定義如下
(8)
函數中α為非線性指數,δ為平衡點附近的線性區范圍。結合式(6)和式(7)可得控制量為
(9)
結合式(7)和式(8)可知,當0<α<1時,跟蹤誤差θerr可以在有限時間內衰減到0,因此稱為FTP控制,形成FTP+ESO的復合控制方式;當α=1時,非線性函數將退化為線性函數,反饋控制律變為比例控制(P),形成P+ESO的復合控制方式。
2 系統的跟蹤性能分析
2.1 ESO性能分析
由圖1可解算出,x1到z1的傳遞函數為
(10)
當控制量為恒定值時,即控制量的導數s*u(s)=0時,得出
(11)
由式(11)可以看出,z1是對x1的低通濾波。由此可知,控制量為0的ESO可作為濾波器使用。
由圖1還可解算出,x2到z2的傳遞函數為
(12)
由式(3)、式(5)、式(9)可得出跟蹤誤差的狀態方程為
(13)
系統的穩態誤差為
(14)
2.2 PIDF對系統的影響
對于輸入信號時變的情況,dθ/dt也為時變量。由式(14)可以看出,系統的穩態跟蹤誤差不僅與ESO的觀測誤差z2-x2有關,還和輸入角度的變化律有關。
系統加入PIDF后,控制量為
(15)
由式(3)、式(5)和式(15)可得跟蹤誤差方程為
(16)
穩態跟蹤誤差為
(17)
比較式(14)和式(17)可知,系統加入PIDF后跟蹤誤差只和ESO的觀測參數相關,與輸入形式無關,減小了系統的跟蹤誤差。
考慮電流限幅的影響時,實際控制量為
(18)
由此可得位置環自抗擾控制器的結構框圖如圖2所示。

圖2 位置環ADRC控制器Fig.2 Position loop ADRC controller
PMSM基于矢量控制的自抗擾調速系統的原理框圖如圖3所示。
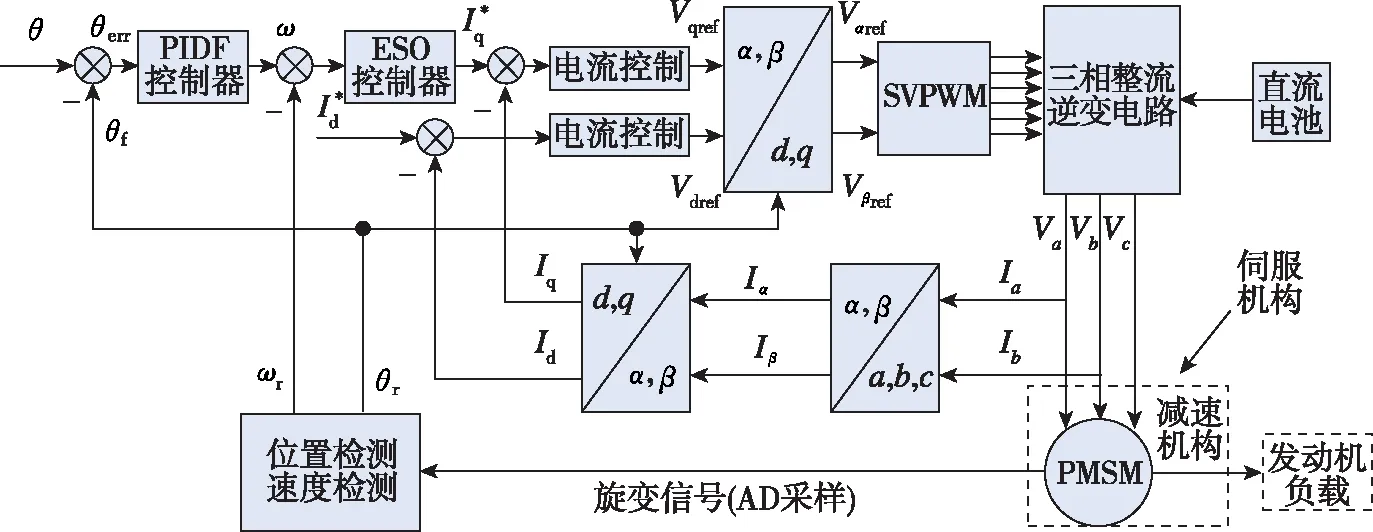
圖3 位置自抗擾控制系統結構框圖Fig.3 Structure block diagram of position ADRC system
3 仿真分析
為了驗證以上設計方法的正確性,首先對電機與測功機系統的轉動慣量進行辨識;然后在頻率為1Hz的正弦輸入信號條件下,分別對FTP+ESO控制策略下有無輸入微分前饋時的跟蹤性能和幅頻特性進行仿真;最后比對仿真結果。
測功機系統通過對電機加載力矩并測量電機角加速度,利用轉動慣量、輸出力矩和角加速度三者之間的關系得到電機的轉動慣量,見式(19)
J=Te/α
(19)
其中,J為轉動慣量,Te為加載力矩,α為角加速度。
本項目中采用的電機參數如表1所示。
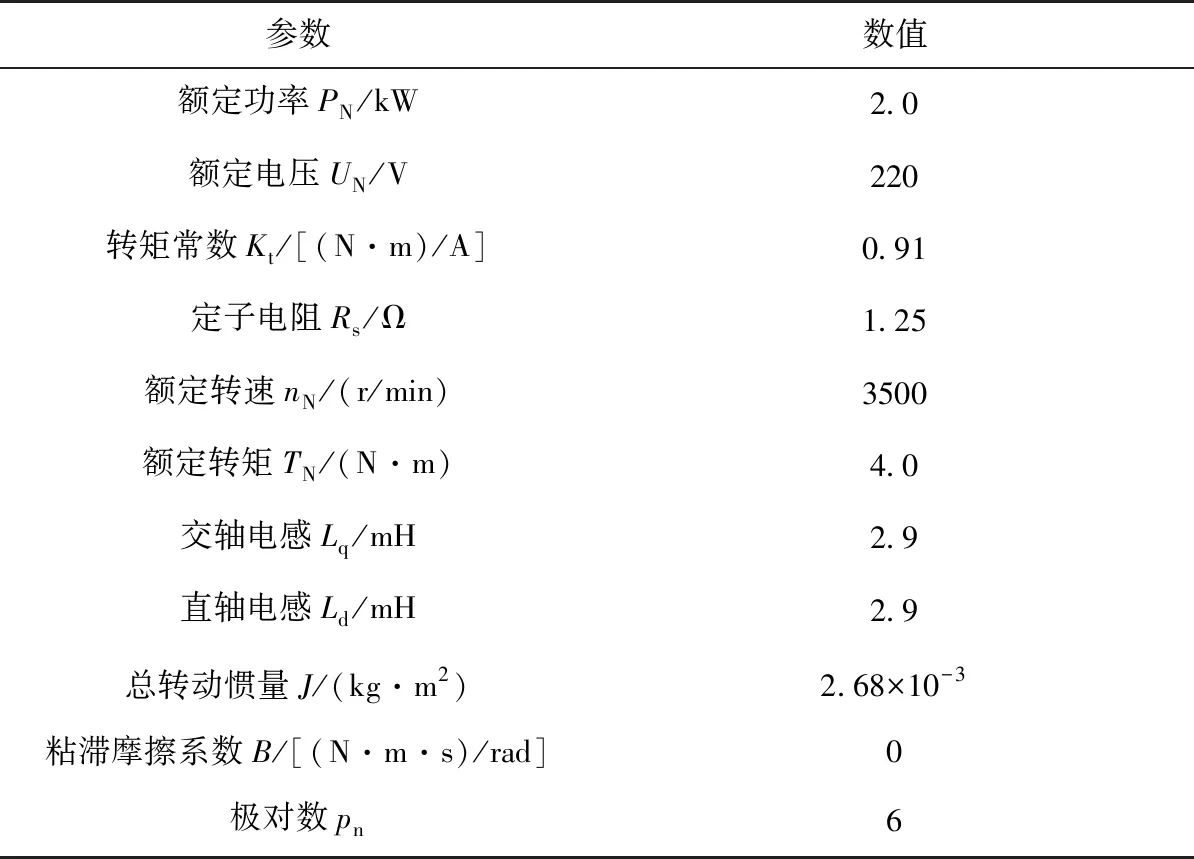
表1 電機參數Tab.1 The motor parameters
實際加載中采用伺服機構的額定負載,即負載為4N·m。控制器參數設置為:k=17,keff=19.7,δ=0.01,p0=500。電流環中的PI控制器參數設置為kpi=0.1,kii=500。
仿真參數如表2所示。
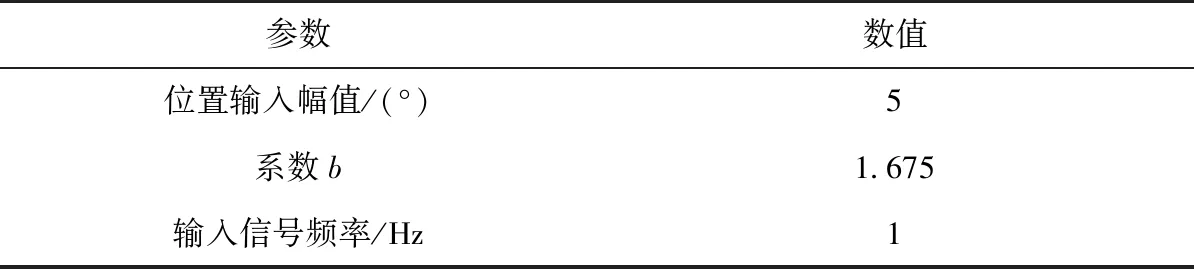
表2 仿真參數Tab.2 Simulation parameters
仿真結果如圖4和圖5所示。
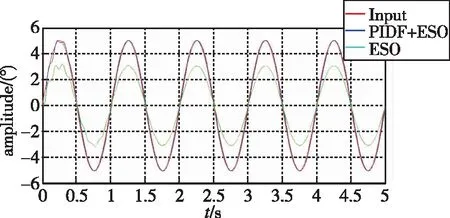
圖4 FTP+ESO控制下正弦輸入時的動態響應(仿真)Fig.4 Dynamic response to sinusoidal input under FTP+ESO control (Simulation)
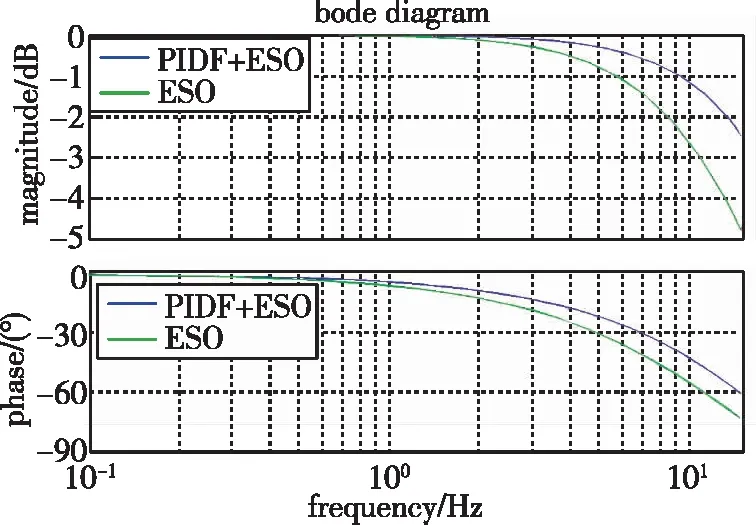
圖5 FTP+ESO控制下的幅頻和相頻曲線(仿真)Fig.5 Amplitude frequency and phase frequency curves under FTP+ESO control (Simulation)
通過圖4可以看出,在FTP+ESO控制策略下,若沒有輸入微分前饋時,系統有2°的跟蹤誤差;當加入輸入微分前饋時,FTP+ESO的反饋曲線和信號曲線基本一致。通過圖5可以看出,當自抗擾系統加入PIDF后,系統幅頻和相頻的帶寬均有一定程度的提升。
同時,為驗證加入PIDF算法后系統依然具有較強的抗干擾能力,對系統的抗干擾性能再次做了仿真比對。系統在1s時刻,加入1N·m的恒值干擾力矩,對比傳統PID算法和加入PIDF后的自抗擾算法的抗干擾性能,仿真結果如圖6所示。
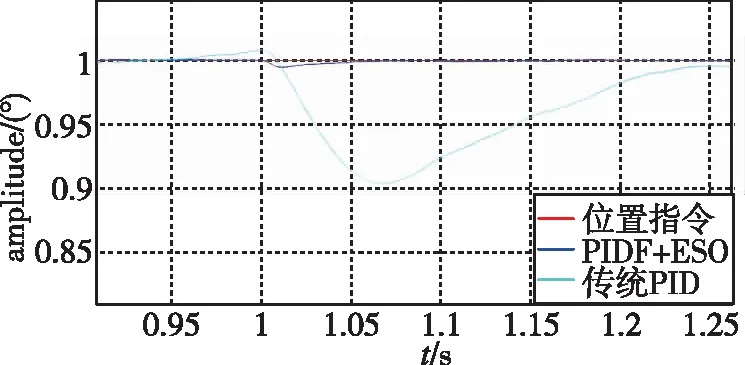
圖6 系統抗干擾性能對比(仿真)Fig.6 Comparison of disturbance rejection performance of the system (Simulation)
4 試驗驗證
為驗證以上的理論分析和仿真結果,本文繼續進行了試驗分析。試驗平臺主要由伺服機構、dSPACE半實物仿真平臺和彈簧桿加載設備組成。試驗中的PWM載波頻率設置為10kHz,通過位置閉環實現PWM占空比的實時調節。
系統的硬件結構框圖和實驗平臺分別如圖7和圖8所示。
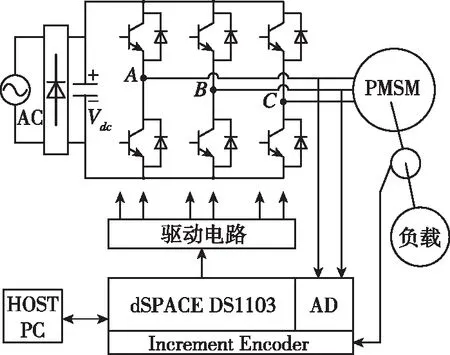
圖7 系統硬件結構框圖Fig.7 System hardware structure block diagram

圖8 實驗平臺Fig.8 Test platform
試驗中,算法使用仿真中的各項參數,跟蹤性能驗證時,采用5°、1Hz的正弦位置輸入信號;幅頻性能驗證時,采用幅值為0.5°、0.1~10Hz各頻率點掃頻。
為驗證FTP+ESO控制器作用下系統的跟蹤時變輸入信號的性能,對跟蹤給定正弦角度輸入的實驗結果進行了對比。先使電機在無輸入微分前饋的控制方式下跟蹤正弦給定,待PMSM運行穩定后,通過切換控制模式使電機運行在有輸入微分前饋的控制方式下。由圖9可以看出,FTP+ESO控制下沒有加入PIDF時有2°的跟蹤誤差,加入PIDF時的系統跟蹤誤差僅為0.08°。
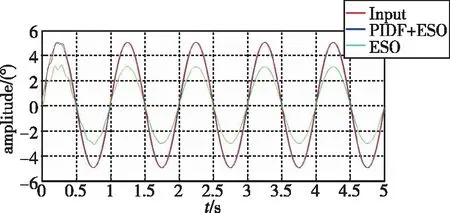
圖9 FTP+ESO控制下正弦輸入時的動態響應(試驗)Fig.9 Dynamic response to sinusoidal input under FTP+ESO control (Test)
表3所示為對比自抗擾控制有無加入PIDF策略時各頻率點(0.1~10Hz)掃頻的幅值和相位的數值。從表3可以看出,自抗擾控制加入PIDF策略后系統的動態特性有較大程度的提高。
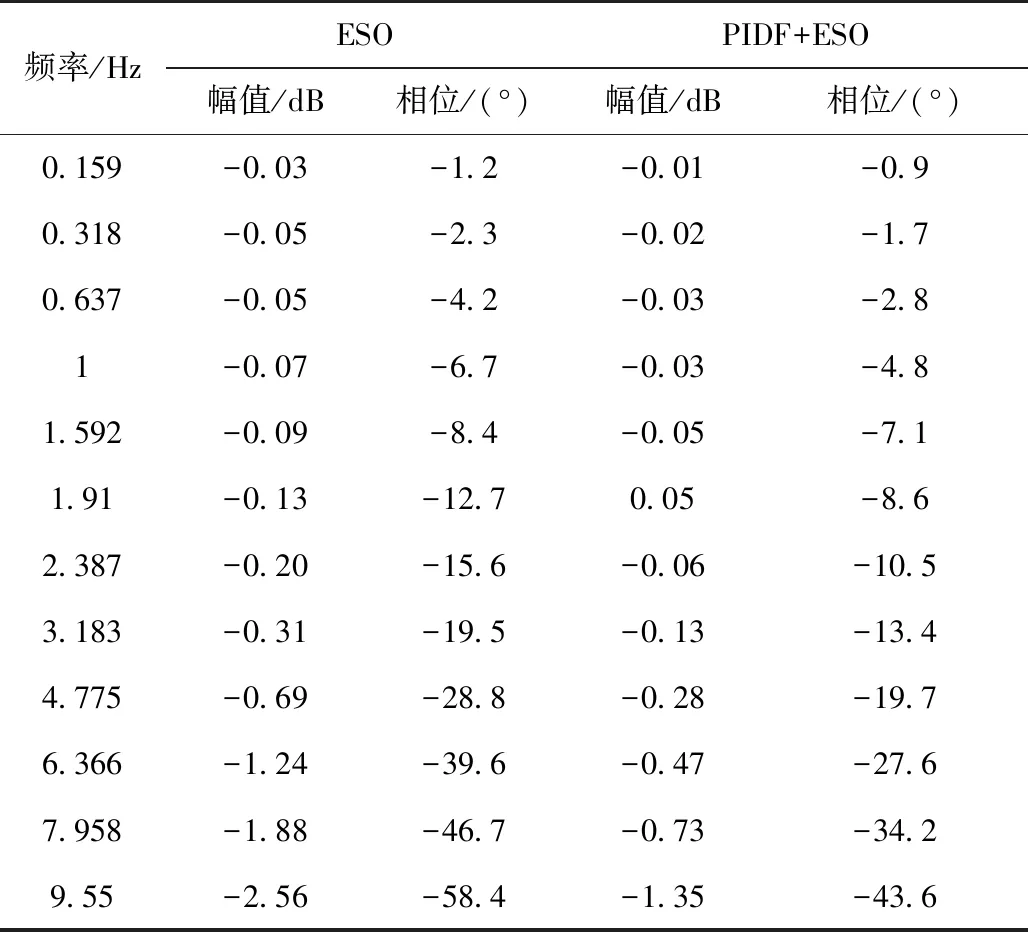
表3 動態特性數據(試驗)Tab.3 Dynamic characteristic data (Test)
由試驗結果可以看出,引入輸入微分前饋可以有效提高對時變位置信號的跟蹤精度和系統的動態特性。
5 結論
利用FTP控制和擴展狀態觀測器以及位置輸入微分前饋相結合的自抗擾控制策略,對運載火箭電動伺服機構用永磁同步電機的位置跟蹤性能和動態特性進行了研究。針對正弦位置輸入信號的情況,通過加入位置輸入微分前饋環節,消除了建模誤差,有效降低了伺服機構對正弦位置信號的跟蹤誤差,并提升了系統的動態特性,同時系統仍然具有較好的抗干擾性能。嚴格的理論分析表明,該方法可以提高伺服系統的跟蹤性能。最后通過仿真和實驗結果比較驗證了該方法的有效性。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
能源工程(2020年6期)2021-01-26 00:55:22
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(2017年9期)2017-09-26 03:41:45
