
小高層建筑外墻及玻璃清潔無機設計與驗證
2020-03-25 15:07:43鄧琳翔石玥倪子涵
設計 2020年2期
鄧琳翔 石玥 倪子涵


摘要:為提高建筑外墻和玻璃的清潔效率,拓寬無人機應用場景。對現有無人機和清潔類機器人進行總體分析,提取所需功能后進行設計、實踐驗證。設計出一款應用于小高層建筑外墻及玻璃清潔的多旋翼清潔無人機。一定程度上提高相關清潔作業效率,也為無人機今后的開發設計提供參考。
關鍵詞:清潔無人機 清潔機器人 多旋翼無人機 建筑外墻 玻璃清潔
中圖分類號:TB47
文獻標識碼:A
文章編號:1003-0069 (2020) 01-0137-03
一、緒論
(一)設計背景
無人機和清潔機器人都為近年的熱門研究對象,二者分別依靠其背后先進的科技力量,從不同方面改善著人們的生活條件和工作方式。目前各個學科對高層建筑的外墻清潔進行了大范圍的研究,但針對小高層建筑外墻的清潔工作卻鮮有相關的設計成果。主要原因是小高層建筑平面布局分散,外墻凹凸距離過大,其清潔往往被忽視。但是,公共建筑多是小高層建筑,而其外墻及玻璃清潔屬于必要性工作。目前的清潔方法主要是依靠人工行垂吊清潔工作,清潔效率非常低,所以為了滿足這個需求,提高清潔頻率和效率,我們開展了此設計項目。
本次設計任務基于對多旋翼無人機的技術分析,以及對清潔機器人的功能提取,將二者技術融合設計出一款清潔無人機產品。該無人機適用于小高層建筑外墻及玻璃的清潔工作,可改善清潔工作方式,提高清潔效率,為建筑甚至城市風貌加分。
(二)無人機發展現狀
1.無人機的發展:無人機即無人駕駛飛機。無人機早期主要應用于軍事方面,如軍事偵察、收集情報等任務。2006年后,我國電子產業的高速發展,無人機的技術逐漸成熟。[1]隨之而來,民用無人機的總體成本不斷下降,其應用領域日益廣泛,功能也愈加智能化。
2.無人機的應用:民用無人機的主要應用包括:巡查、檢測、運輸、拍攝、測量繪制、植保等。近年來,無人機在農業、物流運輸及測繪等方面的應用發展十分迅猛,民用無人機包括工業級無人機和消費級無人機,消費級無人機以拍攝、燈光、玩具等用途為主,其余則多為工業級無人機,如農藥噴灑或物流配送等用途的無人機。[2]本設計定位在工業級無人機領域,基于多旋翼無人機平臺,是對無人機的民用創新應用進行探索。
(三)多旋翼無人機優勢對比
多旋翼無人機,指含有三個或三個以上旋翼軸的無人機。多旋翼無人機相較于其他外墻攀爬吸附式清洗機器人而言,有著得天獨厚的優勢。憑借其平臺的優越性,多旋翼無人機取消了復雜的懸掛吊索及吸附裝置,依靠傳感器、旋翼和自帶的后推槳葉,實現緊貼墻壁并上下左右移動的功能,只需另外的外接水管提供水源,甚至在下一步更換動力系統加強運載能力之后可以直接掛載外置水箱,減少對地面的依賴。因此具有機械結構簡單、成本低廉、操作靈活等優點。
相對于攀爬吸附式清洗機器人,多旋翼無人機更加靈活機動,在清理一些曲面或是斜面等復雜外墻時,由于無人機能實現不依賴吊索,因此效率更高。在達成相同清洗效果的前提下,速度更快、效率更高。在實際的測試中,清潔無人機對于一平方米外墻的清洗平均時間為一分鐘三十秒。
(四)清潔機器人發展現狀
1.清潔機器人的發展:清潔機器人屬于服務機器人之一。[3]在我國,服務機器人的出現和發展要晚于歐美國家,但在近幾年逐漸走人人們的生活,常見應用形式包括清潔、檢測、陪伴、安保等,例如家用掃地機器人等。服務機器人在許多方面為人們提供了便利:提高工作效率和減少高危工作的工作風險等。
2.清潔機器人的種類:按使用環境劃分可分為家用和商用(公共用)兩種。常見的清潔機器人分類可見表1。其功能和作業方式也因具體的使用環境變化,家用機器入主要功能為灰塵清掃與臟污抹除,在較大公共場合使用的大型清潔機器人功能則在此基礎上還包括清水噴灑與污水回收、小型垃圾收集等功能,且分為人工操作、自動操作兩種操作模式。
二、清潔模式分析
(一)清潔環境分析
清潔環境包括室內、室外各種環境,這些環境之中包含有許多不便于人工作業的清潔場景,例如高空、建筑外墻、施工工地、森林或地貌復雜的地區等。
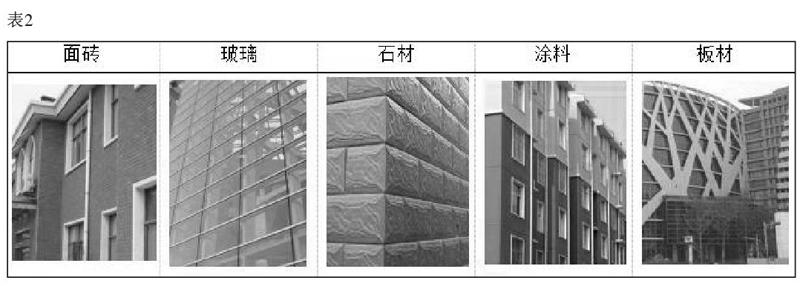
現代建筑外墻應用大面積的玻璃等材質較多,墻面材質結構多樣化(表2),在清潔方面存在許多不便因素。[4]例如,傳統的人工清潔效率以及由于清潔工具的限制,在清潔外墻及玻璃時會耗費大量時間和清潔費用成本;在高空清潔時,清潔人員的工作風險較高,易發生意外。
(二)清潔流程
清潔方式見圖1,先將作業區域用清水噴灑便于清潔劑的稀釋,隨后噴灑清潔劑,滾刷反復滾動摩擦以去除污垢,最后再次噴灑清水將表面沖洗干凈。三、多旋翼無人機搭建
(一)飛行器部分
1.平臺搭建
(1)相關平臺的發展:近年來,無人機行業快速發展,無人機在各行各領域的應用也是不斷普及,涌現了一大批優秀的無人機品牌,如大疆DJI、零度智控ZEROTECH、中科遙感ChinaRS等。迄今為止,無人機的發展趨向于成熟,各項技術不斷改進,這也就為我們搭建一款用于外墻清洗的多旋翼無人機提供了相當便利的環境,我們可以利用市場上相對成熟的技術,以較高的性價比搭建起一款專用的無人機平臺。
(2)選用模塊及方案:在方案設計中,盡可能以集成化的技術進行設想,但在方案驗證的模型中,由于現實技術和資金的制約,我們采用以下的平臺搭建方案(表3)進行驗證。
組裝完成的無人機理論最大拉力1150gx4,平臺重量約為12509,經實測在電池滿電情況下,最大實際載荷為1500g。在外接15米水管的情況下續航時間為5分鐘,后期更換電池能夠進一步將時間延長至15分鐘。
平臺能夠在3-4級風力下正常工作,以抵御小高層建筑群之間的外部風力及無人機和外墻之間的相互干涉。
2.定點功能
(1)定點方式設計:四軸采用GPS+光流雙模式實現定點功能。由于該無人機的工作環境貼近小高層外墻,正常展開工作時,墻體對于GPS信號會有一定程度的遮擋,經實際測量,在空曠外場飛行器接收的衛星數量為10顆以上,但是靠近外墻之后衛星數量銳減為6顆以下,飛行器也出現了定點飄動的現象,故采用GPS+光流雙模式定點。
(2)定點工作流程:在起飛及貼近墻面過程中采用GPS定點,由GPS信號確定飛行器的空間三維坐標,由飛控自帶的氣壓計輔助確定高度信息,確保飛行器能夠不受外界干擾地穩定在一個空間點位上,當貼近墻面時,打開固定安裝在四軸底部的光流定點模塊,以光流定點為主GPS為輔。
當光流模塊的攝像機隨著飛行器在環境中移動時,其目標圖像即地面圖像是在發生變化的,圖像灰度模式的表面運動就稱為光流。簡單理解,光流就是通過檢測圖像中光點和暗點的移動,來判斷圖像中像素點相對于飛行器的移動速度。[5]當我們利用光流模塊返回的位置信息或者速度信息,形成一個閉環控制,再結合對飛控的PID調參,即可實現光流定點。圖2為飛行過程中接收衛星數量。
圖3為在地面站讀取的光流工作數據,紅線為dx,即飛行器在×軸方向上相對于固定點的飄動情況,綠色為dy,即飛行器在Y軸方向上相對于固定點的飄動情況,藍色線條顯示整體的定點水平。
3.啟動規劃路徑
(1)功能原理與設計:在地面對飛行線路進行預先規劃后,飛行器可以實現自動起飛、自動清潔及自動返回。編寫的arduino程序實現功能包括:根據接收機信號控制飛行模式,根據已知坐標、實時坐標和飛機朝向自動控制航線飛行以及自動起飛和降落。
arduino單片機相當于一個虛擬的遙控器,單片機的四個通道與飛控連接,通過對應輸出的pwm值的加減,對應控制著副翼、升降、油門和方向四個通道,進而控制飛行器的左右、前后、高度和飛機朝向。[6]
(2)自動規劃流程:飛行器起飛前,由已知的墻面起始航點坐標,結合自身現在位置的坐標,計算出當前航線的大地方位角,即航線與北方向的順時針夾角,與GPS中的羅盤模塊測得飛機本身航向角度比較,得到轉向角度后,控制飛機起飛轉向正對目標航點并向航點飛行。貼近外墻后,開啟光流定點模塊,飛行平臺進入清洗線路。
在外墻豎直平面的線路規劃為自上而下的豎線型線路(見圖4),一次清洗完成后,飛行器后退離開墻面,上升至第二條清潔路線,重新緊貼墻面,進行下一步的清洗。在清洗完一面外墻后,自動降落至起飛地點。自動降落的流程與自動起飛基本一致。
本次的模型驗證還未使用這個技術,是在下一個迭代版本中需要解決的問題。
(二)清洗部分
1.清潔機構
(1)清潔機構功能設計:清洗部分按上述清洗環境和清洗方式的總結,我們在功能設計上要做到以下幾點: 從清潔流程入手,由于工作流程中包含著一次清潔與二次清潔,即清潔劑清洗與清水沖洗的兩個步驟,需要噴出清水和清洗液兩種性質不同的液體的噴頭,且需配有自動轉動的滾刷;[7]從清潔環境出發,因為外墻相對玻璃幕墻比較復雜,需要有能適應窗框和墻面不同進深的清潔結構;從機身穩定來看,當無人機和墻面進行物理接觸后,需要一些平衡其受力狀態的結構;從無人機本身載荷來考慮,需要盡可能減輕機構的自重。
(2)硬件配置:本文方案綜合以上4個注意點,將清潔滾刷延伸出無人機槳葉外10cm,其長度約等于無人機寬度,材質選擇不易磨損吸水的尼龍絲。同時基于無人機要求重心配平的特點,此方案采取中置電機、用傳動帶為滾刷提供滾動的動力。
(3)清洗順序及方式:清潔工作的順序是從上到下,清潔效果更好、效率更高。為適應這樣的功能,我們選擇在清潔滾刷的上面安置3枚霧化噴頭。噴頭串聯連接,兩頭連上兩條外徑7mm內徑4mm的水管,黑色管道傳輸清水,白色管道傳輸清潔液。這樣的機構設計,不僅能依照清潔步驟錯開清水和清潔液的噴出時間,同時也可減輕無人機的負重。
整個清潔機構由上述部分組成,滿足其功能需求的基礎上,同時盡可能減少機構的重量也是一個重點考慮的部分。[8]
2.穩定機構:在實際使用時,無人機和墻面進行接觸以后,受到的反沖力會造成無人機飛行控制系統不穩定,甚至失去平衡。所以要求我們在設計時,需要考慮到清潔機構和墻面進行接觸時,有一個裝置起到過渡穩定的作用。經過受力分析得知,無人機在飛向墻面并使清潔機構接觸墻面時,無人機受到一個水平方向背離墻面的力。同時,在滾刷與墻面進行接觸的時候,我們考慮把線接觸變為面接觸,使得無人機進行清潔時工作更加穩定。這要求穩定機構能夠平衡這個水平力之外,還要和墻面有三個以上的接觸點。
在參考上述的要求以后,我們對穩定機構進行了如下設計(見圖5):使用相似的4個彈簧連桿機構,分別放置在矩形的四角上,使清潔機構在工作時形成4點的面接觸。它們不僅具有穩定作用,還提供無人機和墻面接觸時緩沖過渡。
(三)方案設計
1.設計因素:本文的設計方案,主要采用現有技術較成熟的無人機平臺作為基礎,再針對小高層建筑外墻和玻璃清潔環境存在凹凸的特點,然后把在上文整理出的清潔流程(見圖1)作為參考進行本次設計。
2.造型與外觀:無人機的工業應用強調功能的實現,首先其工作環境要求清潔無人機的所有槳葉要被包覆起來,避免槳葉和環境進行碰撞從而影響飛行平衡;在設計外殼覆蓋件時,需要把飛行器和清潔設備相關的電子器件和工作中不可避免產生的水霧進行隔離,在造型設計上考慮到空氣流動的影響,所以覆蓋件外輪廓是封閉的對稱圓形罩,材料采用ABS塑料,如下圖(圖6)即本文的驗證模型實物圖。
為了提高飛行過程中的安全性,使用白色和黑色碳纖維機架進行區分提高識別度。而清潔裝置的主要部件也采用白色,不僅給飛手提示無人機的機頭朝向,而且提高了無人機視覺上的統一性(圖7為模型頂視圖,圖8為模型前端展示)。
3.迭代要求:在后期的產品化過程中,可以改進的地方在于提高機架的整體性,在結構上優化清潔裝置,微縮電子器件,使無人機的重心更加穩定,同時在覆蓋件上可以做更多功能上的特征細節,對清潔無人機靈活、高效的特征進行強化。
結語
無人機作為工作平臺,為解決人們生產生活的問題提供了更多的可能。而本文提到的清潔無人機設計是基于無人機平臺,向工業無人機應用進行的探索。在本次設計探索中,我們希望彌補小高層建筑外墻及玻璃清潔的研究空缺,減少人工清潔的危險性,部分替代“蜘蛛人”的工作,同時提高清潔效率,減少清潔公司的成本。本文的設計方案經過驗證,是具備清潔高效率的特點。但也存在很多可以改進的地方,比如使用系留式無人機的電源方案解決續航問題,用自動規劃路徑代替人工遙控。希望本文作出的敘述能為相關開發或設計人員提供一些思路和參考。.
參考文獻
[1]范東辰.無人機的推廣現狀及今后發展趨勢探究[J].軍民兩用技術與產乩.2017.22:3-3
[2]宋晨暉.民用無人機應用進展[J].機電工程技術.2018.47(11):163-166
[3]胡振旺.陳益民.李林.基于STM32的家庭服務機器人系統設計[J].電子產品世界2015.22(9):55-57
[4]張賀.院文博.基于建筑外墻裝飾技術研究[J].建材與裝飾2018(2):64-64
[5]胡永彪.張文祥.金守峰等.基于機器視覺的工程機械行走速度測量方法[J].廣西大學學報(自然利學版)2012.37(5):907-912
[6]陳從浩.張止中.Arduino的應用及發展前景[J]輕工科技,2018.34(05):77-78
[7]杜微陳光魏澤忠等‘種新型自動玻璃清潔機器人的系統設計[J].黑龍江科技信息2013(31):62
[8]陳曦.李森.陳釋文等.幕墻清潔機器人分析與設計[J].山東工業技術2019(19):133-134
