大秦線HXD1型機車自動駕駛系統設計
2020-03-26 05:41:52濤1謝振峰1黃軒滔
技術與市場 2020年3期
張 濤1,謝振峰1,黃軒滔,付 金
(1. 中國鐵路太原局集團有限公司,山西 太原 030013;2.中車株洲電力機車有限公司,湖南 株洲 412001)
0 引言
自動駕駛技術目前主要應用在城市軌道交通領域,應用形式為有人值守的自動駕駛或全自動駕駛。在國內重載鐵路貨運運輸領域,沈陽鐵路局、西安鐵路局、神朔鐵路分公司等多個單位均對自動駕駛技術進行了應用研究。
大秦線HXD1型機車運行線路環境復雜,重載列車編組較長、載重大、司機操作難度和強度大且操作方法不一致,列車運行的安全性和平穩性有待提高。本文提出的大秦線HXD1型機車自動駕駛系統,能夠有效降低大秦線鐵路機車司乘人員操作強度,提升機車運行安全及可靠性,降低運行設備故障率,降低能耗,提升鐵路的運行效益。
1 系統設計原則及目標
1.1 總體設計原則
1)系統所有功能在機車原安全控制邏輯和安全監控設備的防護功能不變的情況下實現。
2)系統須在司機值守下運行。
3)司機操作權限優先于系統。
4)系統設計遵循“故障導向安全”。
1.2 設計目標
1)平穩控制:系統控制列車運行期間避免車鉤間隙劇烈變化,產生較大沖動,確保整列運行的穩定性。
2)減少司機操縱頻率和勞動強度。
3)節能:系統能夠充分利用線路條件,提高列車運行的節能性。
2 機車自動駕駛系統
2.1 系統組成
大秦線HXD1型電力機車自動駕駛系統主要由監控系統(LKJ15C)、自動駕駛裝置ATO、網絡控制系統(CCU)、ATO與CCU數據通信的網關設備(RDA裝置)、制動控制系統(BCU)以及必要的地面設備等組成,如圖1所示。

圖1 自動駕駛系統組成
系統以自動駕駛裝置為核心,基于監控系統、網絡控制系統、制動控制系統等子系統的安全聯動,實現機車的自動駕駛功能。
2.2 系統工作原理
在自動駕駛模式下,自動駕駛裝置首先從LKJ15C主機獲得臨時限速、編組信息、線路數據和位置信息后,綜合機車的位置、限速、坡道和彎道等信息,經過計算,通過ETH/MVB網關RDA向機車網絡控制系統輸出牽引/電制動指令或向制動系統輸出空氣制動指令。牽引/電制動指令和空氣制動指令在主控機車由牽引系統和制動系統實施,通過無線重聯同步控制系統傳輸到從控機車,實現同步操縱。
2.3 系統主要功能
系統主要功能是要實現機車在站場發車-線路運行-進站停車過程中的自動化運行,減少司機手動操縱,在機車自動駕駛運行時替代司機對司控器和制動手柄等的操作,具體功能如圖2所示。
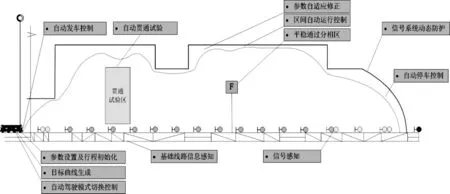
圖2 系統主要功能
3 主要子系統配置
3.1 監控系統
監控系統(LKJ-15C)主要功能是通過IC卡獲取臨時限速,通過司機獲取列車編組信息,預存運行線路的線路基礎數據,通過BTM天線和地面應答器獲得機車的位置信息,并計算列車運行的限速,然后將相關信息提供給自動駕駛裝置。根據列車自動駕駛的需求,系統需要獲得列車的準確位置信息,監控系統與自動駕駛裝置之間需要傳輸大量數據。
3.2 自動駕駛裝置
自動駕駛裝置作為系統核心部件,通過實時獲取的列車運行狀態信息來計算目標速度,并實時輸出相應的自動駕駛控制指令。裝置采用2乘2取2的安全-冗余架構,保證了系統的安全性與可靠性,冗余通道或模塊單一故障不影響系統的運行,冗余模塊同時故障按照故障導向安全方式處理,裝置的安全等級不低于SIL4級。
3.3 網絡控制系統
網絡控制系統(CCU)負責整車邏輯和特性控制,基于西門子成熟、穩定、可靠的SIBAS 32網絡,通過網關設備RDA裝置與自動駕駛裝置進行數據通信。在自動駕駛模式下,網絡控制系統根據自動駕駛系統的牽引和電制等指令驅動列車按照規劃速度運行,并給自動駕駛系統反饋實際的牽引力、電制力和速度等參數。
3.4 制動機系統
制動控制系統(BCU)負責執行由自動駕駛裝置發出的空氣制動命令并反饋回相關參數和狀態。機車既有CCBII制動機的硬件系統保持不變,升級軟件以適應自動駕駛裝置控車要求。在運行過程中,司機的制動控制操作具有最高優先等級。
3.5 地面設備
為了提高列車定位精度,LKJ-15C監控裝置配備了BTM天線(應答器信息接收單元)接收地面點式應答器定位數據。在地面信號機之前加裝無源點式應答器,用于列車位置校正,可以實現正線通過、側線通過和側線停車等功能。
4 結語
本文介紹了大秦線HXD1型機車自動駕駛系統的設計方案,闡述了其設計原則及目標、系統組成、系統工作原理功能及主要子系統配置。通過單機、單機輕載/重載等試驗,對自動駕駛系統通訊、模式切換、自動起車、自動運行控制等基本功能進行了驗證,結果表明,該自動駕駛系統能夠有效減少司機操縱頻率和勞動強度,提升重載列車運行的自動化水平。
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
中國科技論壇(2017年7期)2017-07-25 08:49:53
媽媽寶寶(2017年2期)2017-02-21 01:21:24
國際漢語學報(2016年1期)2017-01-20 08:21:20