面向微動特性獲取的雷達波形設計
2020-03-28 12:01:58田西蘭
雷達科學與技術 2020年1期
田西蘭
(1.中國電子科技集團公司第三十八研究所, 安徽合肥 230088;2.孔徑陣列與空間探測安徽省重點實驗室, 安徽合肥 230088)
0 引言
微動是由目標的特殊結構在特定的受力作用下引起的,常常是目標“獨一無二”的運動狀態,屬于目標的精細特征。由于微動為小幅運動,可控性低,對目標微動的模仿非常困難,因此基于微動特征的目標識別技術已被認為是雷達目標識別技術中最具發展潛力的技術之一[1-5]。2000年,美國海軍研究實驗室(Navy Research Laboratory)的Chen將微動及微多普勒概念正式引入到雷達觀測領域,開拓了基于雷達信號的目標微動特征提取這一新領域[6-7]。在觀測直升機、螺旋槳飛機、噴氣式飛機等目標時,在一定的姿態角范圍內,由于飛機旋轉槳葉對雷達回波的調制,雷達回波中往往含有周期性調制的微多普勒成分。這為飛機目標的識別提供了重要的特征信息。
然而,雷達目標微動特征的提取不僅與提取方法、微動目標自身參數有關,還與雷達發射信號的波形參數密切相關,發射波形決定了目標回波的信息質量和數量。這就給雷達目標識別理論和技術提出了新的課題。當前雷達波形設計的理論基礎是Woodward所提出的模糊函數[8],這個函數闡明了雷達波形和距離分辨率及徑向速度分辨率之間的關系。但是,這一波形設計理論,不能滿足目標微動特性獲取對雷達信號的要求,因為該理論沒有考慮發射信號能否完全激勵飛機目標的微動特征。因此,分析發射波形參數與微動特征之間的聯系,針對有效獲取微動特性的需求對雷達波形進行設計,具有重要意義。
實際上雷達波形參數對微動特性獲取的影響,主要看旋轉槳葉的調制信息能否穩定、可靠地采集到。這要分析雷達脈沖重復頻率、脈沖寬度和雷達駐留時間與飛機旋轉槳葉調制特征的關系,針對微動特性獲取這一目的,設計一組“最優波形”參數。本文第1節建立飛機目標調制特性理論參數模型;第2節闡述面向微動特性獲取的雷達波形設計方法;第3節利用仿真實驗進行驗證,實驗結果證實了本文方法的有效性。
1 飛機目標調制特性理論參數模型
建立飛機旋轉槳葉物理結構與雷達回波調制特性的數學模型是分析發射波形參數與微動特征之間聯系的重要基礎。本節以直升機為例進行分析說明,設直升機處于平飛狀態,雷達和直升機旋轉槳葉的幾何關系如圖1所示,雷達位于空間固定坐標系(U,V,W)的原點Q,初始時刻目標距坐標系原點距離為R0,槳葉轉動中心相對于雷達固定坐標系的方位角和俯仰角分別為α和β。設直升機槳葉數為N,槳葉根部到轉動中心距離為L1,葉尖到轉動中心距離為L2,槳葉轉動角頻率為ωr,則接收到的旋轉葉片回波信號可表示為[9]

(1)
式中,A為散射信號強度,ωc為發射信號頻率,λ為波長,vr為機身徑向速度,t為時間,函數Φk(t)可表示為

(2)
式中,φ0為初始旋轉角。
圖1 雷達和直升機旋轉槳葉的幾何關系
1.1 時域特征
槳葉反射信號的時域特征由式(1)的幅度來定義,可以看出,時域信號是由一系列辛克函數組成的。槳葉反射信號探測也取決于槳葉的數量。當槳葉數為偶數時,在雷達徑向矢量不變的前提下,兩塊處于相對位置的槳葉幾乎同時產生槳葉反射信號,因此槳葉反射信號出現的頻率為
Fr=Nfr
(3)
式中,fr為槳葉轉動周頻率。槳葉反射信號的3 dB時寬近似為
(4)
對于具有奇數片槳葉的直升機,情況則有些區別,很明顯,當某塊槳葉出現槳葉反射信號時,其他槳葉并不會同時出現槳葉反射信號。由此出現槳葉反射信號的頻率為
Fr=2Nfr
(5)
此時,槳葉反射信號的3 dB時寬近似為
(6)
由于槳葉可以看成具有相似的機械構造和雷達目標特征,因此對每個槳葉而言,在相似的雷達限時脈沖期間,接收到的每個槳葉回波信號也非常相似。兩次槳葉反射信號出現的時間間隔也是其頻率的倒數,即Tc=1/Fr。
1.2 頻域特征
對式(1)進行傅里葉變換得到頻譜表達式為

(7)
可見,調制譜是由一系列譜線間隔為Δf=Nfr的譜線組成,其中CNK為譜線幅度,fc為發射信號頻率,fd為機身多普勒頻移,M為調制譜的譜線個數,其表達式為
(8)
由此可得調制信號帶寬為
(9)
2 波形設計
目前雷達探測大都采用相參體制的線性調頻脈沖波形,所以本節以線性調頻脈沖波形為基礎,針對穩定、可靠獲取微動特性這一目的,對線性調頻脈沖波形參數進行設計。
2.1 脈沖重復頻率設計
受空氣動力學的限制,槳葉葉尖的切線速度是有限的,它和葉片長度的乘積幾乎是一常數,表明調制譜的帶寬也是有限的。因此,若雷達脈沖重復頻率(PRF)足夠高,就可能得到全部調制譜。對于脈沖多普勒雷達,其脈沖重復頻率決定了采樣速率。所需的最小采樣速率必須滿足奈奎斯特(Nyquist)速率以避免頻率混疊。
由式(9)可知,槳葉引起的最大微多普勒頻移為
(10)
對于實際飛機目標,還應考慮機身運動,設由機身產生的多普勒頻移為fd,則目標整體產生的最大多普勒頻移為
{Fd}max=fd+{fmicro}max
(11)
因而所需脈沖重復頻率應滿足
fPRF≥2×{Fd}max
(12)
2.2 脈沖寬度設計
為了探測到至少一次槳葉反射信號,雷達必須使用脈沖重復頻率足夠高的脈沖信號,如此才不會在兩次脈沖間隔期間漏掉槳葉反射信號。如圖2所示,可看出為保證至少有一部分脈沖信號照射到槳葉,脈沖重復周期TPRT必須短于槳葉反射信號持續時長τf[10]。如果發射脈沖的脈沖重復周期間隔時長超過槳葉反射持續時間,則其對槳葉反射信號的探測將取決于發射脈沖對槳葉反射持續時間的作用時機,如此則該情況下的探測并不可靠。
圖2 槳葉反射信號與雷達脈沖參數關系
當某塊槳葉轉動到能出現槳葉反射信號的位置時,為確保至少一個完整的脈沖能量照射到槳葉,則需要稍短一些的脈沖重復周期,可用式(13)表示:
τp+TPRT≤τf
(13)
式中,τp為脈沖寬度。
因此,為保證至少有一個完整的脈沖探測到槳葉反射信號,脈沖持續時長加上脈沖重復周期必須小于槳葉反射信號的持續時長。
2.3 雷達駐留時間設計
雷達駐留時間的持續時長必須加以考慮,雷達駐留時間必須足夠長,以確保在駐留時間內至少有一塊槳葉與雷達徑向矢量相垂直。如圖2所示,可以看出雷達駐留時間Tacc必須長于槳葉反射信號出現的間隔Tc,即
Tacc≥Tc
(14)
滿足以上條件,將保證在雷達駐留時間內,至少能探測到一次槳葉反射信號。
3 實驗結果與分析
3.1 飛機目標調制特性理論參數計算
本文采用仿真實驗驗證波形設計方法的正確性,仿真數據按式(1)產生典型場景下直升機、螺旋漿飛機及噴氣式飛機三類飛機目標槳葉回波。仿真參數設置如下:雷達工作在C波段,頻率fc=5 GHz,波長λ=0.06 m;多種典型直升機、螺旋漿飛機及噴氣式飛機槳葉結構參數如表1、表2及表3所示;直升機高度為3 km,徑向距離為7.098 km;螺旋槳飛機高度為8 km,徑向距離為8.827 km;噴氣式飛機高度為10 km,徑向距離為16 km。
表1 直升機槳葉結構參數
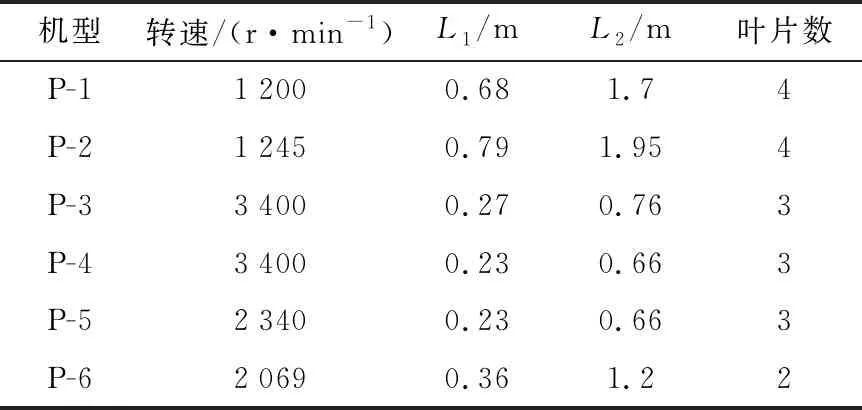
表2 螺旋槳飛機槳葉結構參數
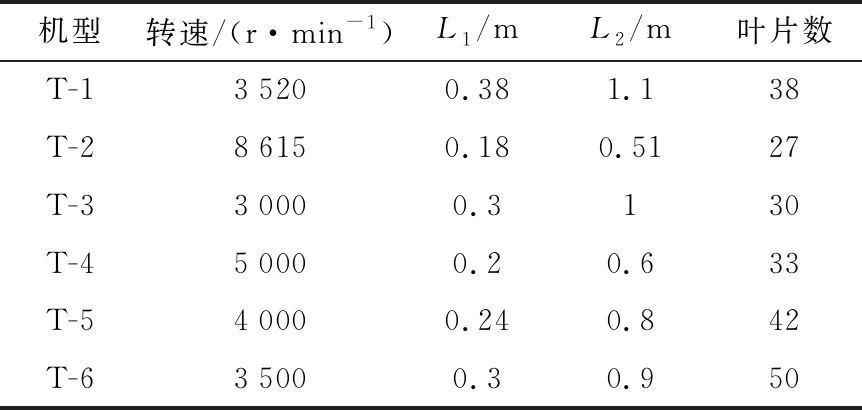
表3 噴氣式飛機槳葉結構參數
由于直升機尾翼相對于主旋翼要小得多,在回波能量中所占比例較小,因此在對直升機目標進行微動特性分析時沒有考慮尾翼的調制。根據前文槳葉反射信號時域及頻域特征計算表達式,得到各型直升機槳葉反射信號間隔、3 dB時寬、譜線間隔、譜線條數、調制帶寬等微動特征參數如表4所示。
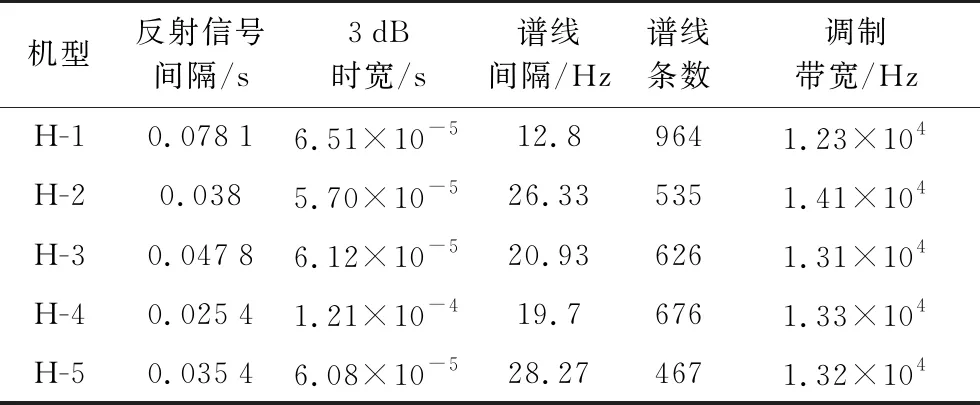
表4 計算得到的直升機微動特征參數
在對螺旋槳飛機和噴氣式飛機進行微動特性分析時,考慮了其雙發動機結構,即機身左右具有結構相同的2副槳葉,2副槳葉之間有一定的距離和相位差。表5及表6分別給出了計算得到的各型螺旋槳飛機和噴氣式飛機微動特征參數。
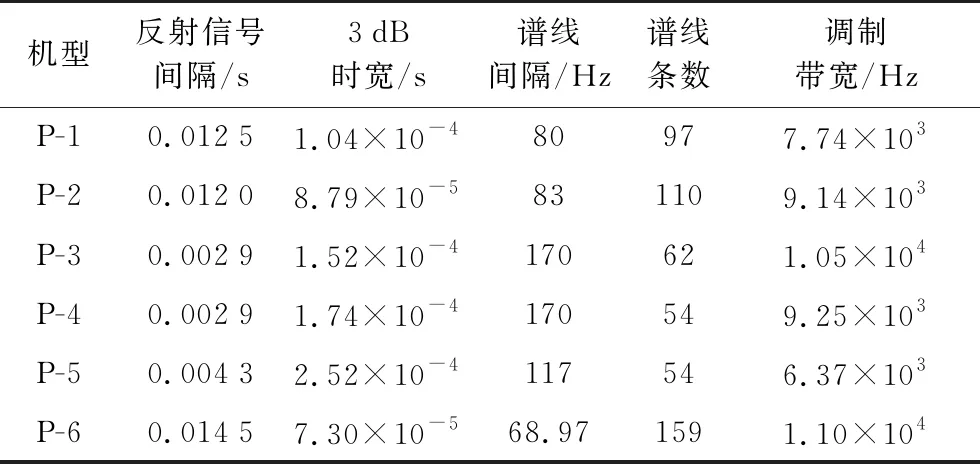
表5 計算得到的螺旋槳飛機微動特征參數
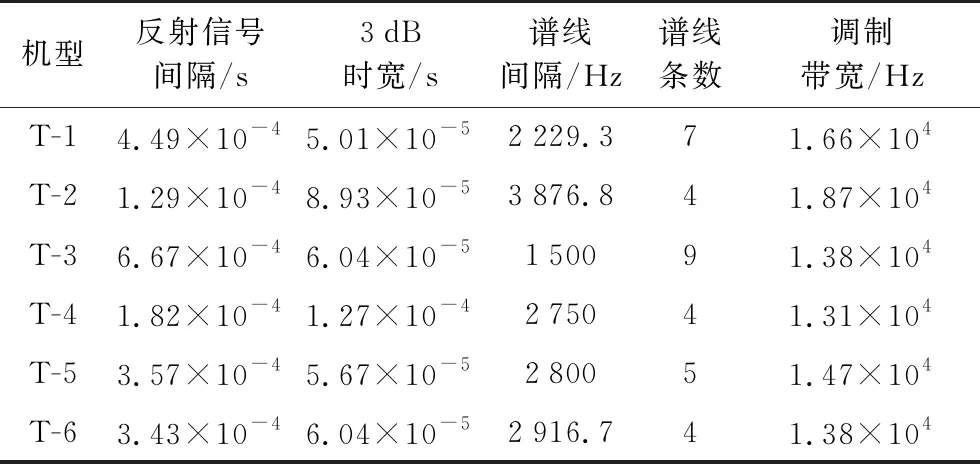
表6 計算得到的噴氣式飛機微動特征參數
3.2 波形參數設計結果
1) 脈沖重復頻率
考慮飛機目標機身運動,通常直升機、螺旋槳飛機及噴氣式飛機飛行速度一般不超過300 km/h,800 km/h及1 225 km/h,其對應的多普勒頻移分別為2.777 8 kHz,7.407 4 kHz及11.343 kHz。根據表4、表5及表6計算得到的各型飛機目標微動特征參數可知,直升機、螺旋槳飛機及噴氣式飛機最大微多普勒頻移分別可達7.050 kHz,5.500 kHz及9.350 kHz。綜合上述分析,直升機、螺旋槳飛機及噴氣式飛機目標整體最大多普勒頻移分別為9.827 8 kHz,12.907 4 kHz,20.693 kHz。根據式(12)脈沖重復頻率設計原則,所需脈沖重復頻率應大于或等于42 kHz。
2) 脈沖寬度
根據式(13)脈沖寬度設計要求,所需脈沖寬度τp需滿足
τp≤τf-TPRT
(15)
即脈沖寬度需小于或等于(τf-TPRT)的最小值。根據表4、表5及表6計算得到的各型飛機目標微動特征參數可知,直升機、螺旋槳飛機及噴氣式飛機最小3 dB時寬分別為57 μs,73 μs及50.1 μs。根據前文脈沖重復頻率設計值,得到脈沖重復周期為23.81 μs。綜上,脈沖寬度應小于或等于26.29 μs,進一步假定占空比為30%,則脈沖寬度應為8 μs。
3) 雷達駐留時間
根據式(14)雷達駐留時間要求,雷達駐留時間必須長于槳葉反射信號出現的間隔。根據表4、表5及表6計算得到的各型飛機目標微動特征參數可知,直升機、螺旋槳飛機及噴氣式飛機最大槳葉反射信號間隔分別為78.1 ms,14.5 ms、0.667 ms。因此,雷達駐留時間理論上最少應為78.1 ms,考慮到工程實際,雷達駐留時間至少應達到100 ms。
(2)從單源先驅體出發來對合成的陶瓷先驅體進行理論構造,這樣得到的陶瓷先驅體能夠克服取代差異,減少缺陷。通過這兩點構造的陶瓷先驅體結構,在分子動力學模擬下能夠獲得影響因素更少的有效理論結果,對今后研究同樣有參考意義。
通過理論分析并結合典型場景下的仿真實驗,得到C波段雷達面向微動特性獲取的一組“最優波形”參數如表7所示。
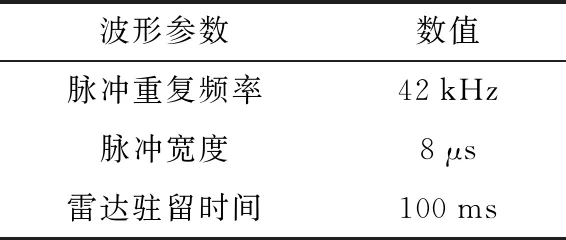
表7 波形參數設計結果
3.3 可行性驗證
本節根據表7得到的一組“最優波形”參數,來驗證對3類飛機目標微動特性獲取的可行性。
1) 直升機微動特性獲取可行性驗證
從表4可以看出,H-1型直升機槳葉反射信號間隔最長,H-2型直升機調制帶寬最大,因此以H-1型及H-2型直升機為例進行驗證。圖3為H-1型及H-2型直升機微動特性獲取實驗結果。其中圖3(a)為H-1型直升機時域調制特征,由于H-1型直升機槳葉反射信號間隔較長,在雷達駐留時間內僅獲得1次槳葉反射信號回波;圖3(b)為H-2型直升機時域調制特征,由于H-2型直升機槳葉反射信號間隔較短,在雷達駐留時間內獲取了2次槳葉反射信號回波。此外,從圖3(c)及圖3(d)兩型直升機信號頻譜可以看出,兩型直升機都未發生頻譜混疊。上述實驗結果表明,所設計的波形參數能穩定、可靠地探測到槳葉反射信號,且能完整地顯示整個調制譜,因此滿足微動特性獲取需求。
(a) H-1型直升機時域調制特征
(b) H-2型直升機時域調制特征
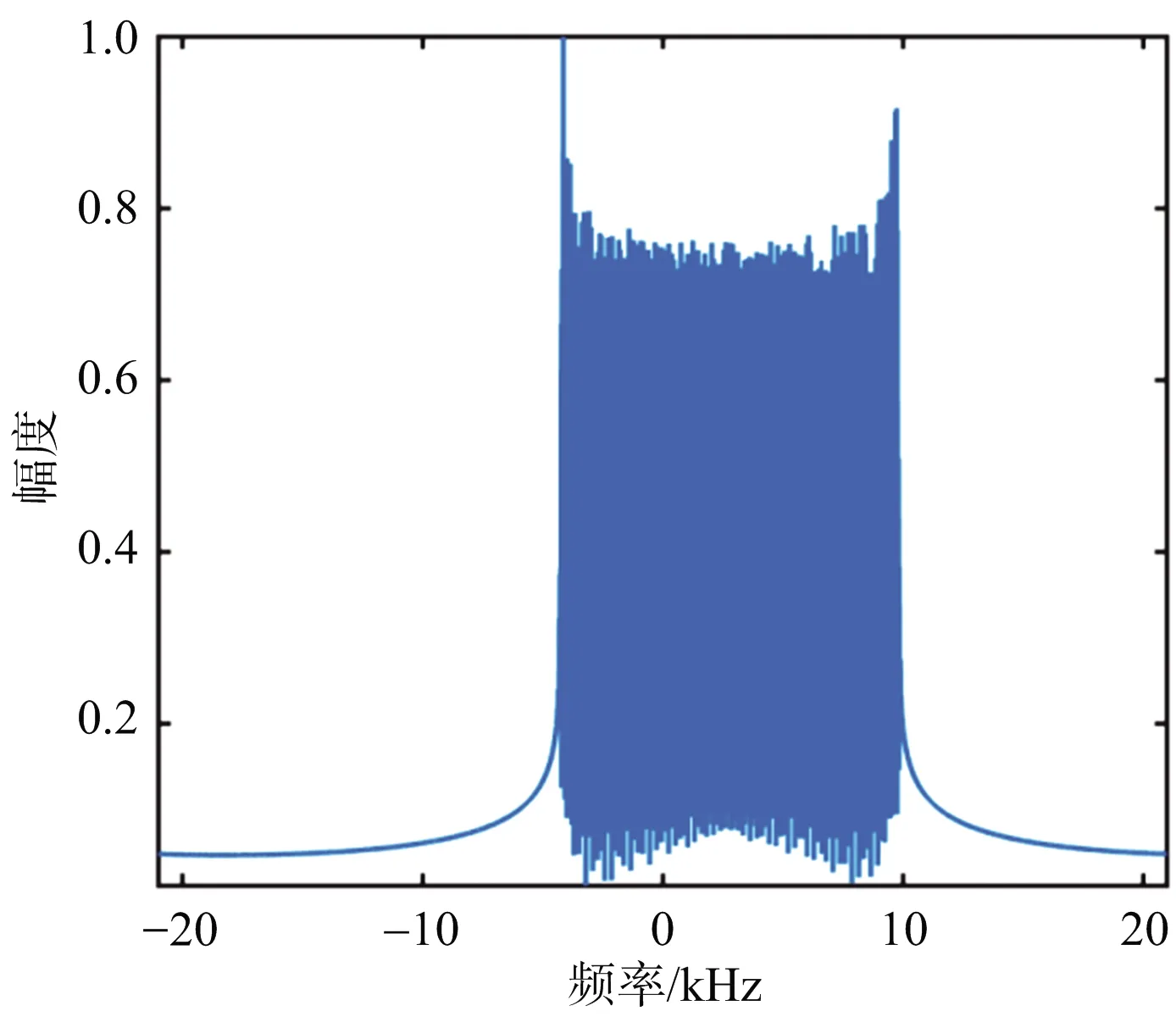
(d) H-2型直升機信號頻譜圖3 直升機微動特性獲取實驗結果
2) 螺旋槳飛機微動特性獲取可行性驗證
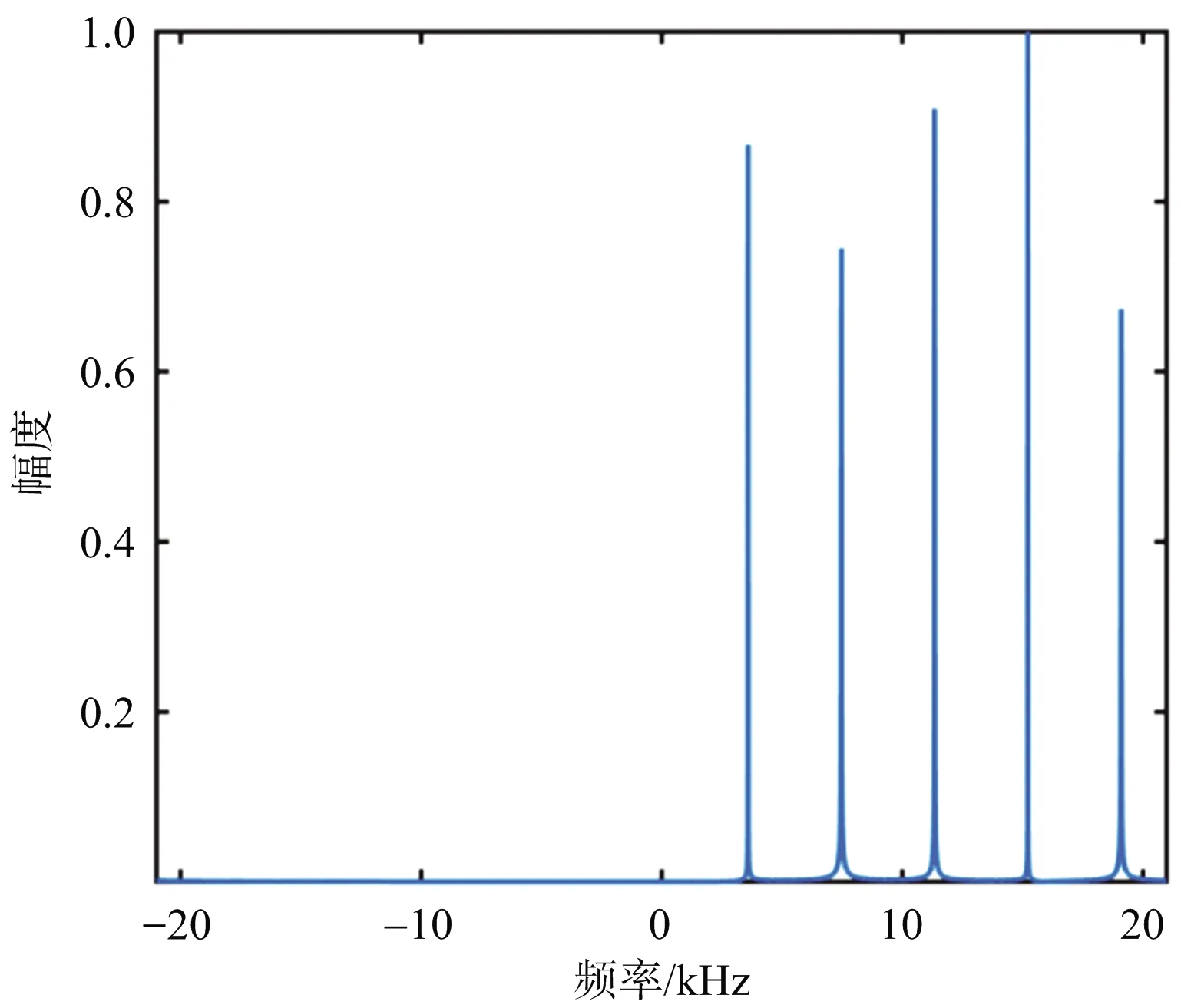
從表5可以看出,P-6型螺旋槳飛機同時具有最長槳葉反射信號間隔及最大調制帶寬,因此以P-6型螺旋槳飛機為例進行驗證。圖4為螺旋槳飛機微動特性獲取實驗結果。其中圖4(a)為P-6型螺旋槳飛機時域調制特征,在雷達駐留時間內,P-6型螺旋槳飛機獲取到了7次槳葉反射信號回波;圖4(b)為P-6型螺旋槳飛機信號頻譜,可以看出,由于機身運動,微多普勒譜不再關于零多普勒對稱,且由于脈沖重復頻率足夠高,頻譜沒有產生混疊。上述實驗結果表明,所設計的波形參數滿足螺旋槳飛機微動特性獲取需求。
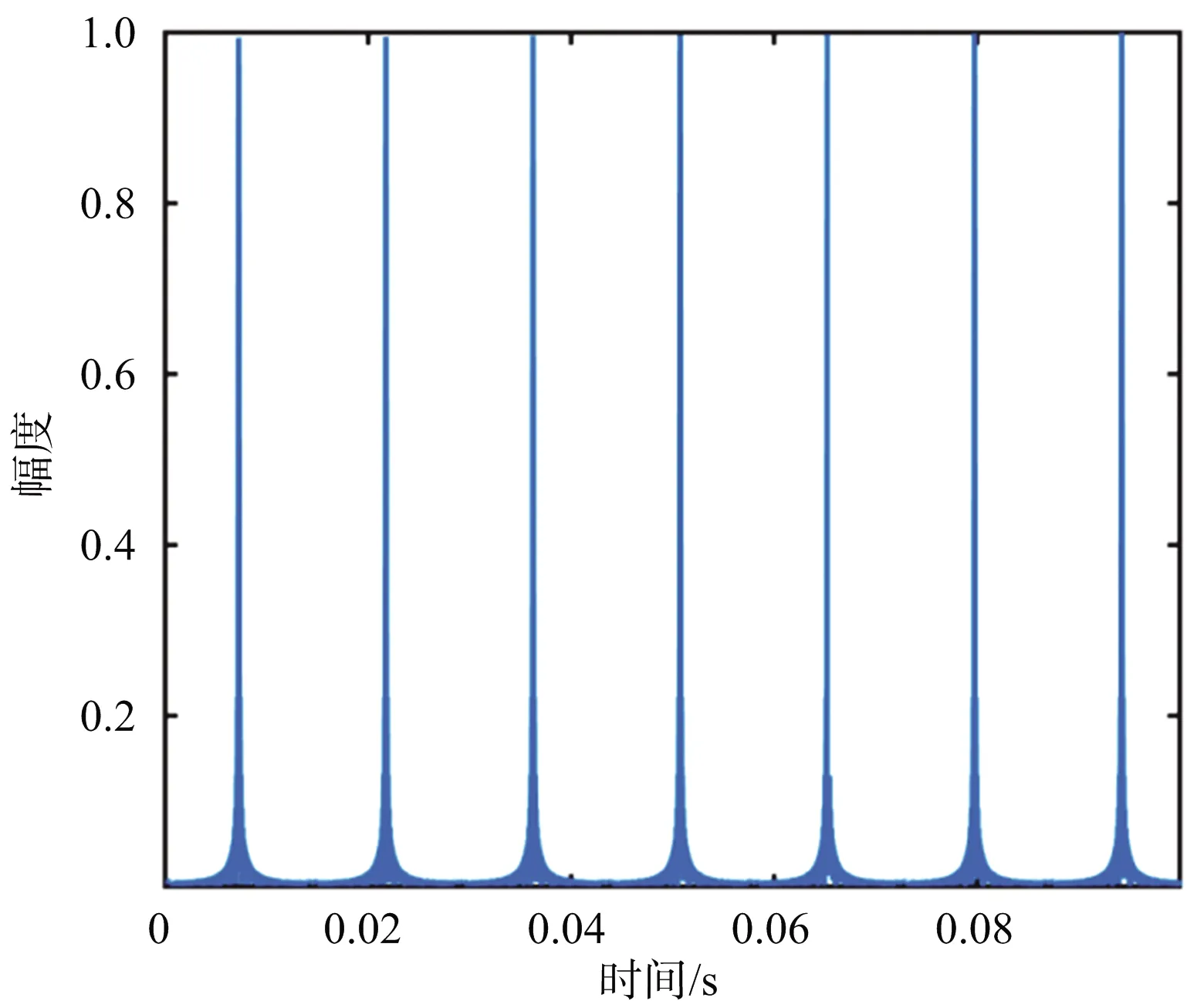
(a) P-6型螺旋槳飛機時域調制特征
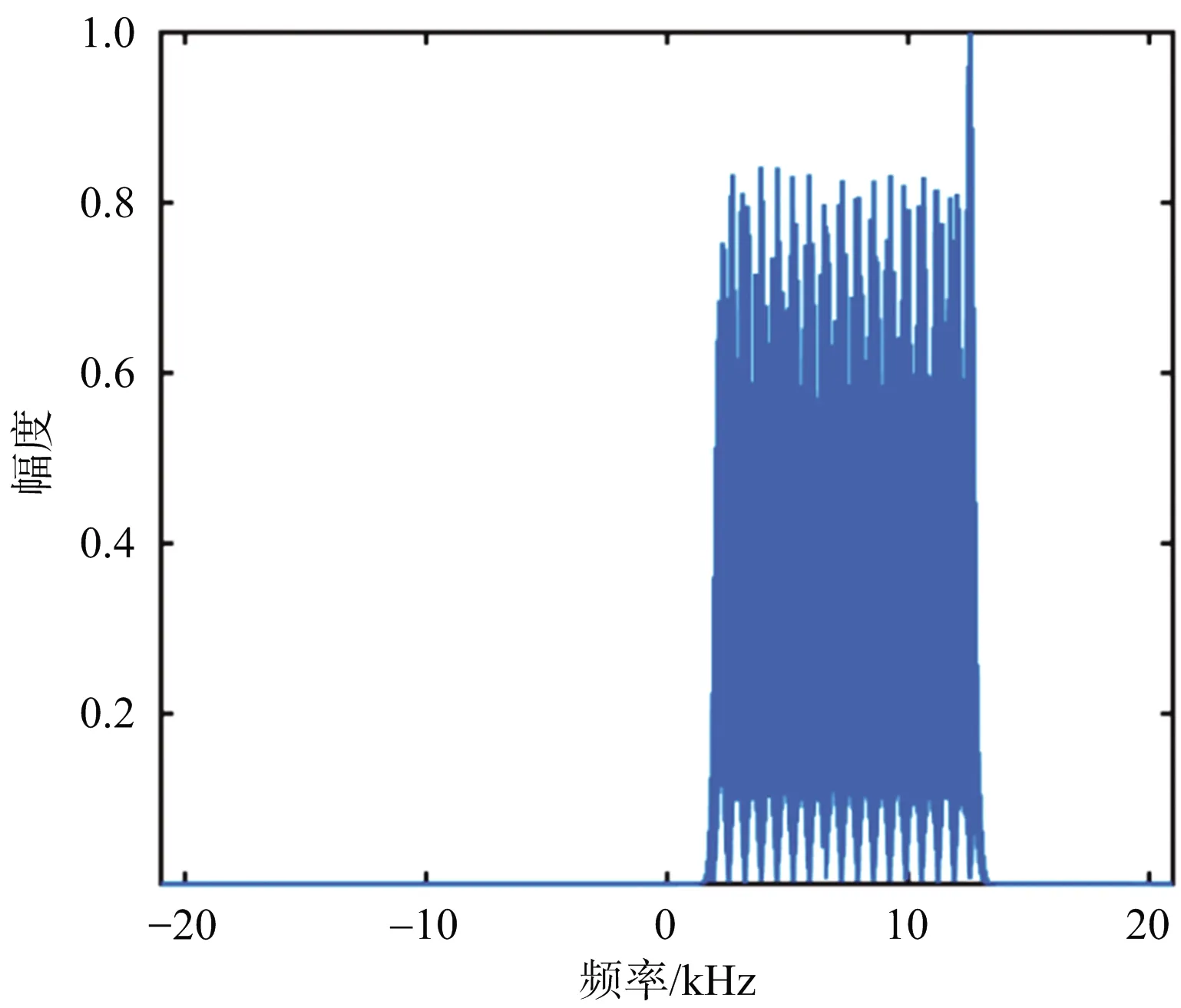
(b) P-6型螺旋槳飛機信號頻譜圖4 螺旋槳飛機微動特性獲取實驗結果
3) 噴氣式飛機微動特性獲取可行性驗證
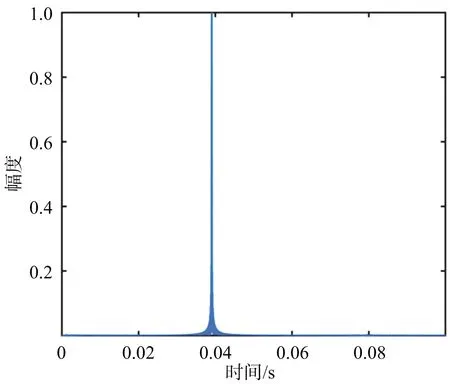
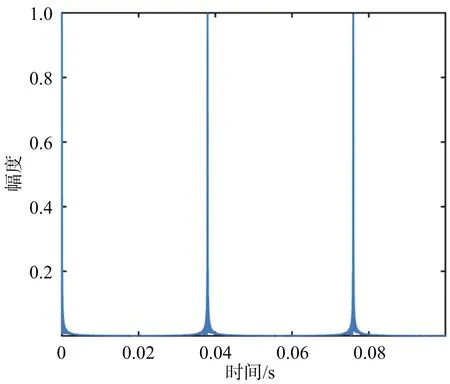
從表6可以看出,T-2型噴氣式飛機調制帶寬最大,T-3型噴氣式飛機槳葉反射信號間隔最長,因此以T-2型及T-3型噴氣式飛機為例進行驗證。圖5為噴氣式飛機微動特性獲取實驗結果。其中,圖5(a)、(b)分別為T-2型及T-3型噴氣式飛機時域調制特征,圖5(c)、(d)分別為其對應的局部放大圖,可以看出,兩型噴氣式飛機槳葉反射信號回波非常密集;圖5(e)、(f)分別為T-2型及T-3型噴氣式飛機頻譜,可以看出其頻譜沒有產生混疊。實驗結果表明所設計的波形參數同樣滿足對噴氣式飛機微動特性獲取需求。
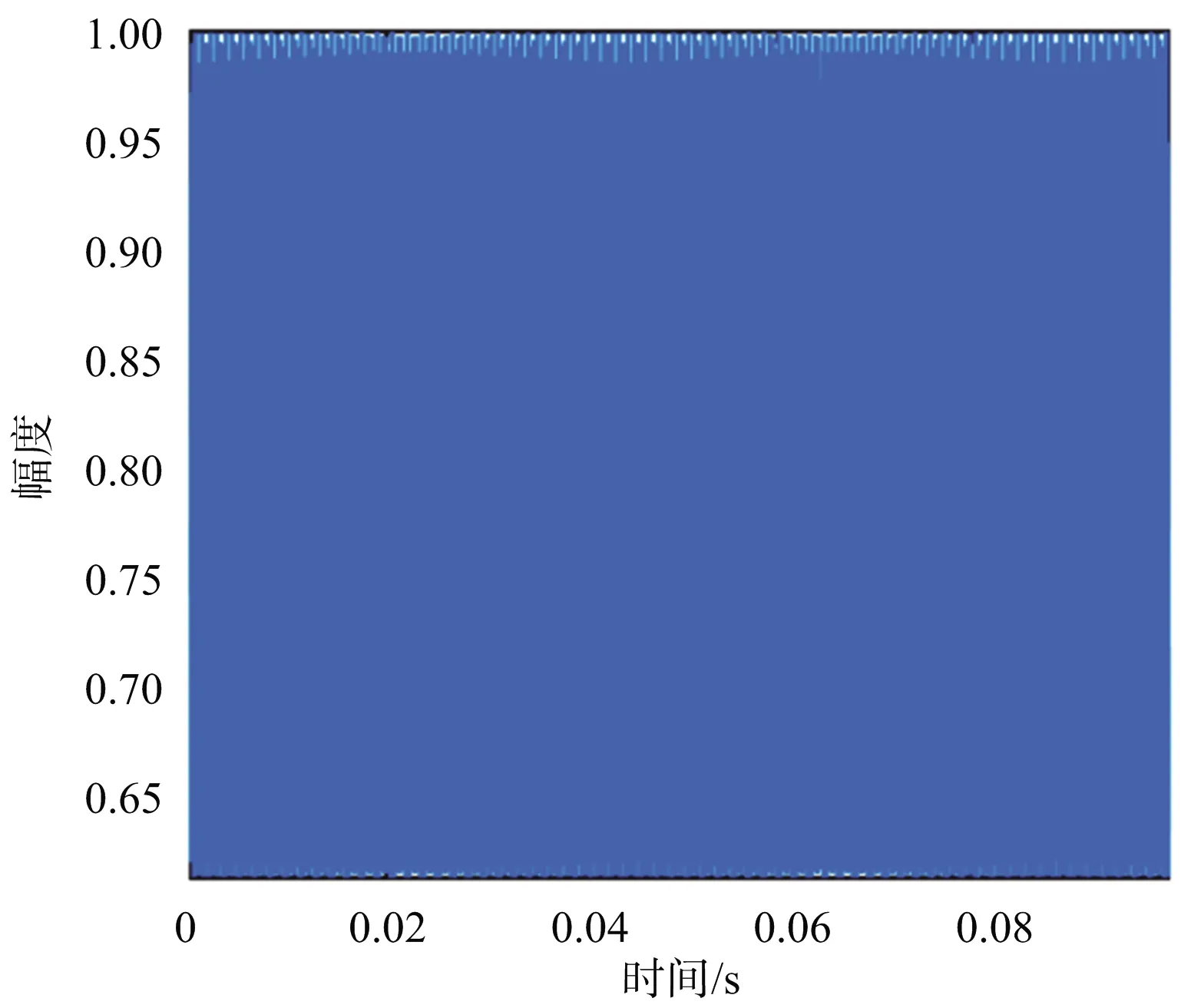
(a) T-2型噴氣式飛機時域調制特征
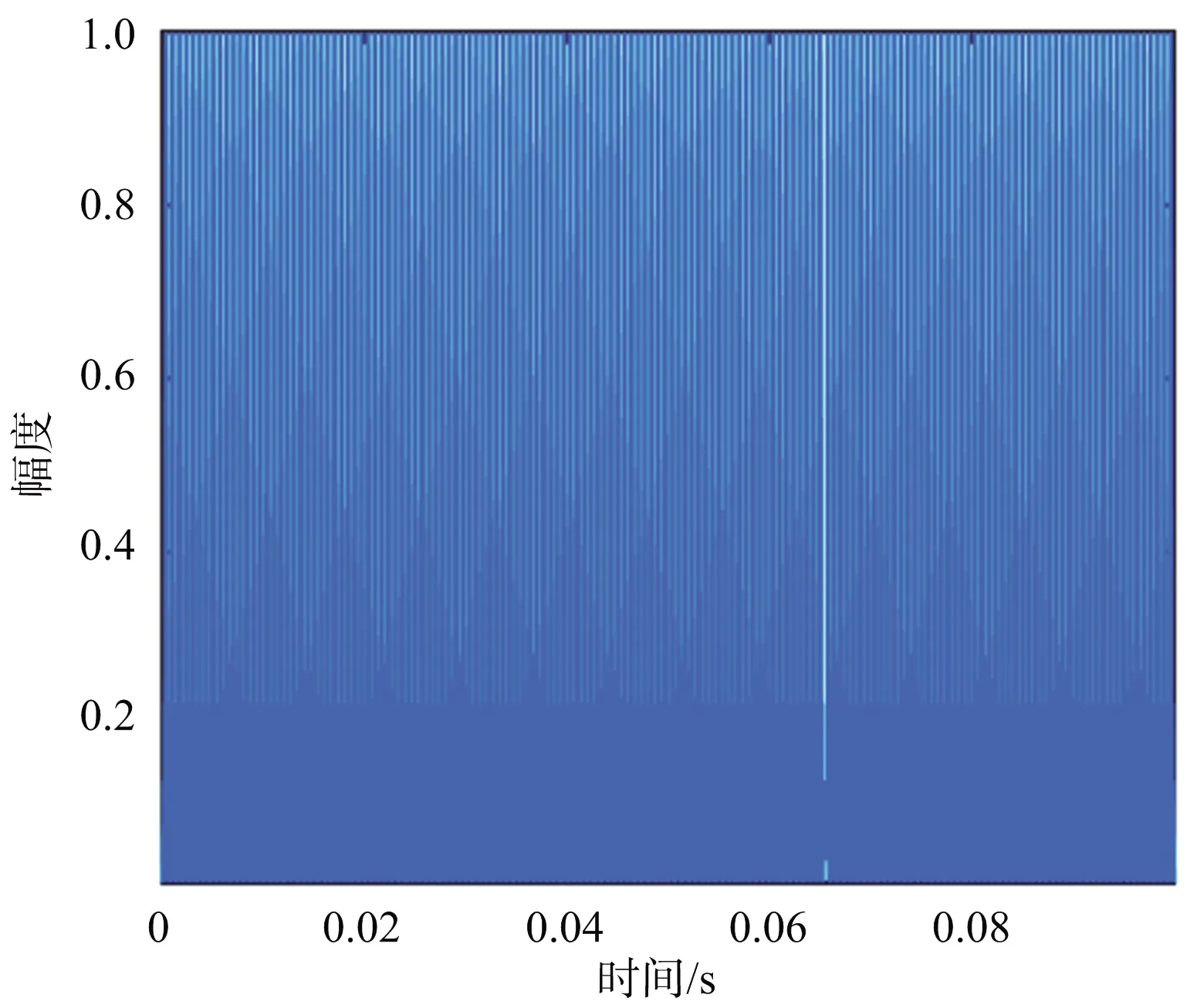
(b) T-3型噴氣式飛機時域調制特征

(c) T-2型噴氣式飛機時域調制特征局部放大圖
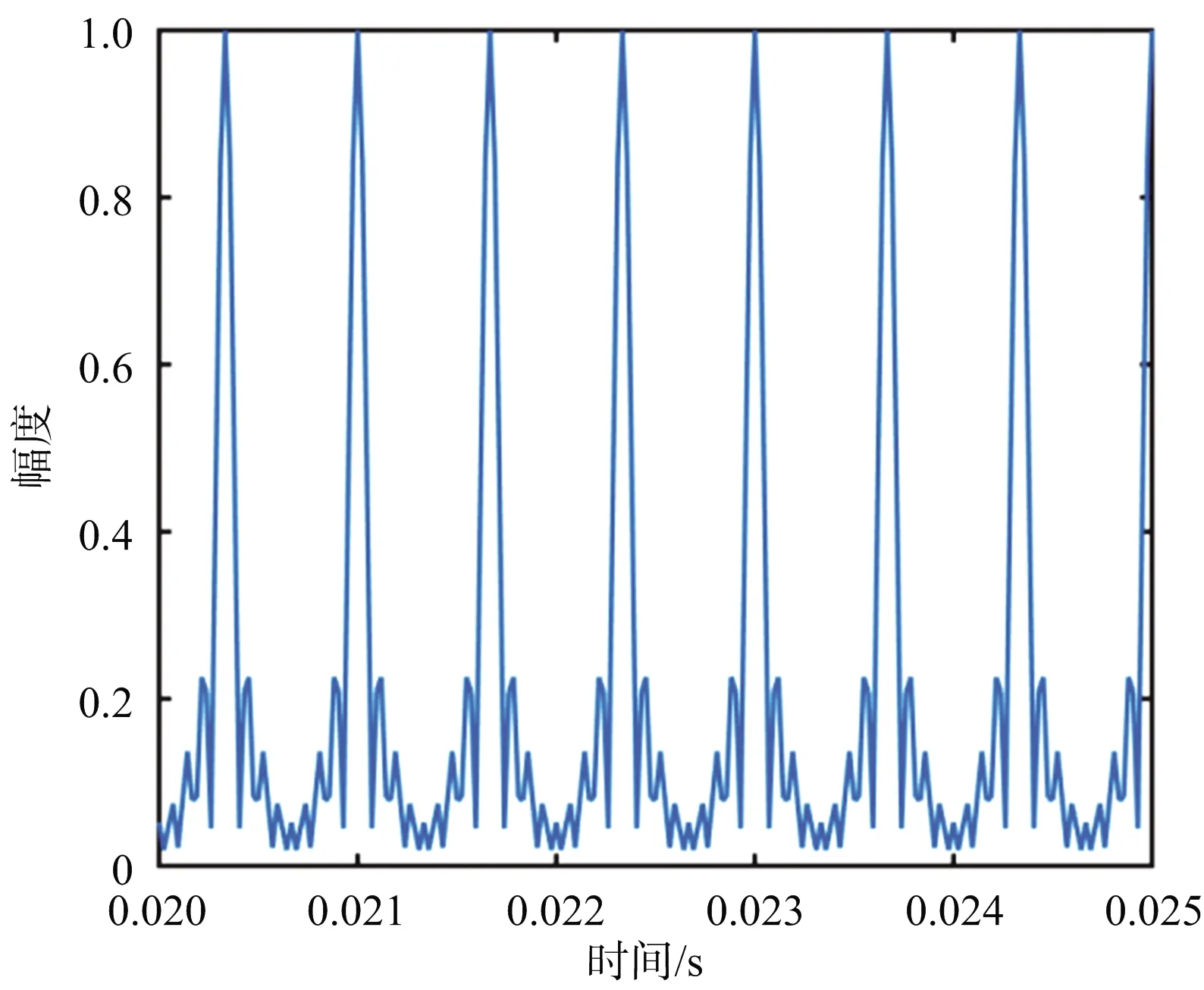
(d) T-3型噴氣式飛機時域調制特征局部放大圖
(e) T-2型噴氣式飛機信號頻譜
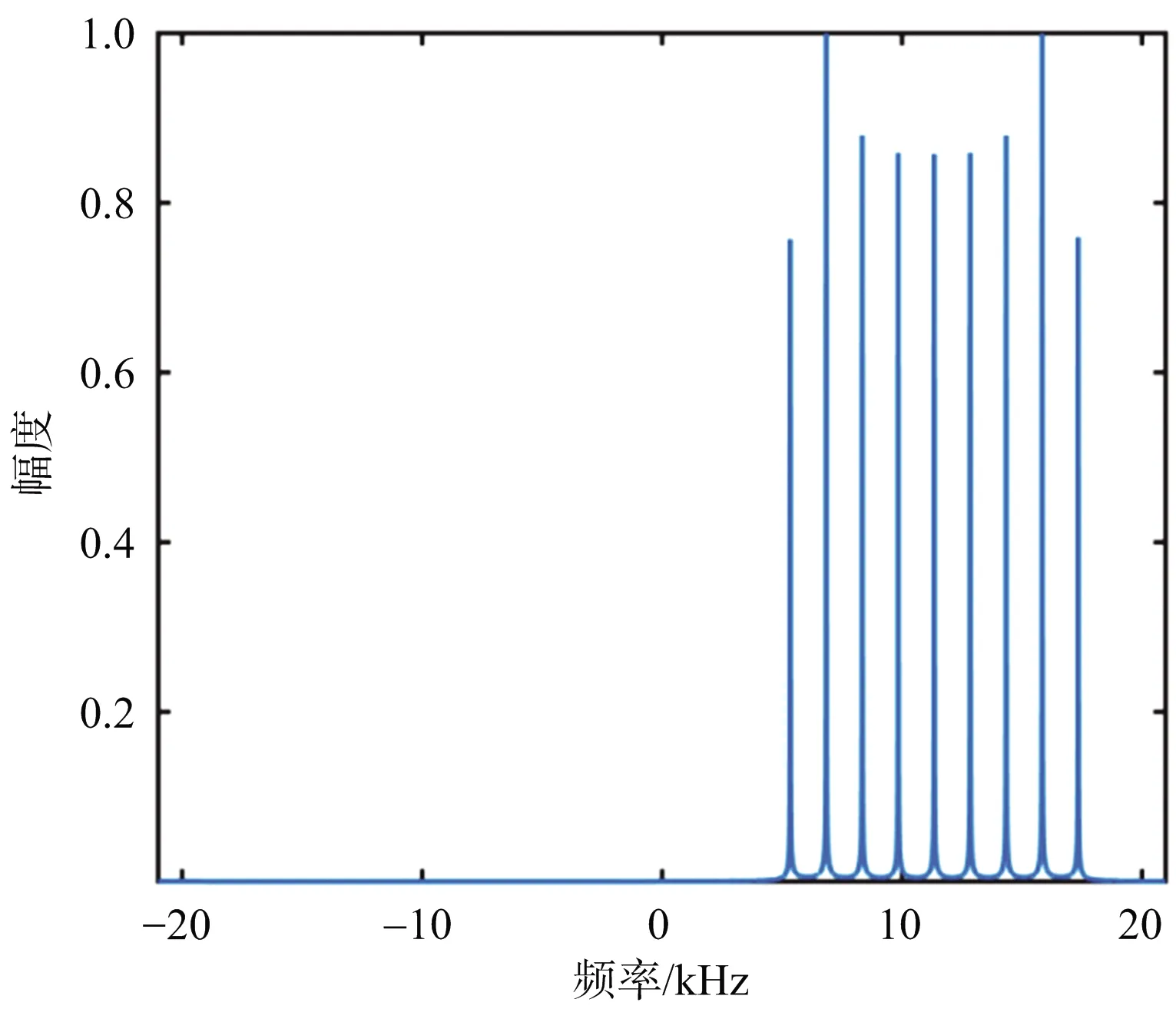
(f) T-3型噴氣式飛機信號頻譜圖5 噴氣式飛機微動特性獲取實驗結果
4 結束語
雷達發射波形的脈沖重復頻率、脈沖寬度、雷達駐留時間等參數直接影響著目標微動特性的獲取。本文以直升機為例,建立飛機目標調制特性理論參數模型,并詳細分析了槳葉反射信號的時域及頻域特征,在此基礎上,針對有效獲取目標微動特性這一目的,對雷達波形參數設計進行理論上的分析,最后,設計了典型場景下的仿真實驗,實驗結果驗證了本文波形設計方法的有效性。本文理論分析及實驗結果為從雷達回波中提取目標微動特征奠定了數學基礎和理論指導,能極大地促進雷達飛機目標識別的研究。
猜你喜歡
小哥白尼(軍事科學)(2022年3期)2022-06-09 03:11:24
環球時報(2022-05-30)2022-05-30 15:16:57
鴨綠江(2021年35期)2021-04-19 12:24:18
民用飛機設計與研究(2020年4期)2020-11-27 17:34:02
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
當代陜西(2019年11期)2019-06-24 03:40:28
中國生殖健康(2019年3期)2019-02-01 06:12:26
作文周刊·小學一年級版(2017年9期)2017-06-20 00:19:33
小學生導刊(低年級)(2016年8期)2016-09-24 22:09:04
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
