基于物理模型的汽車(chē)空氣動(dòng)力學(xué)研究綜述
2020-03-29 13:05:32劉錦生徐勝金王慶洋鮑歡歡
實(shí)驗(yàn)流體力學(xué) 2020年1期
劉錦生, 徐勝金,*, 王慶洋, 鮑歡歡, 王 勇
(1. 清華大學(xué) 航天航空學(xué)院, 北京 100084; 2. 中國(guó)汽車(chē)工程研究院股份有限公司, 重慶 401122)
0 引 言
汽車(chē)行駛與氣流相互作用,會(huì)引出非常復(fù)雜的流體力學(xué)問(wèn)題。圖1給出了一個(gè)行駛的汽車(chē)與空氣相互作用的示意圖。從固定在車(chē)身上的坐標(biāo)系觀察,氣流圍繞汽車(chē)運(yùn)動(dòng)并最終在汽車(chē)尾部匯合。無(wú)論是車(chē)頂還是車(chē)底,遠(yuǎn)離汽車(chē)的位置(數(shù)學(xué)上定義為無(wú)窮遠(yuǎn))流動(dòng)速度與來(lái)流速度v相同。汽車(chē)是三維鈍體,即垂直流向方向的物理尺度相當(dāng)。車(chē)身頂部鼓起,而車(chē)底可看成具有表面結(jié)構(gòu)的平板,流動(dòng)經(jīng)過(guò)車(chē)頂和車(chē)底時(shí)流動(dòng)特征有本質(zhì)差別。一般情況,以車(chē)身長(zhǎng)度定義的雷諾數(shù)范圍Re=5×105~107,即車(chē)身周?chē)牧鲃?dòng)基本上都是湍流。所以,汽車(chē)周?chē)牧鲃?dòng)既有三維的湍流繞流,也有平板邊界層流動(dòng),這些流動(dòng)經(jīng)過(guò)車(chē)身發(fā)生流動(dòng)分離、產(chǎn)生剪切流、生成大尺度渦結(jié)構(gòu),并在尾部匯合、混合,形成含有豐富渦系的尾流。

圖1 車(chē)身周?chē)牧鲃?dòng)
這些復(fù)雜的流動(dòng)與氣動(dòng)力有緊密關(guān)聯(lián),根據(jù)雷諾輸運(yùn)定理,其關(guān)系可用式(1)和(2)定性描述:

(1)
M=r×∑F
(2)
式中,Π和S分別是圍繞汽車(chē)選定的控制體的體積和表面積,F(xiàn)為氣動(dòng)力矢量,M為氣動(dòng)力矩矢量,U是控制體內(nèi)的流動(dòng)速度矢量,是時(shí)間和空間的函數(shù),ρ是空氣密度。可以看到,氣動(dòng)力與控制體內(nèi)時(shí)空變化的流動(dòng)直接相關(guān)。所以,摸清流動(dòng)物理規(guī)律就能理解和控制氣動(dòng)力。然而,汽車(chē)周?chē)鲃?dòng)非常復(fù)雜,給認(rèn)識(shí)和分析帶來(lái)巨大挑戰(zhàn):(1) 盡管Π和S選定后是不變的,但控制體內(nèi)的流動(dòng)是時(shí)間和空間的函數(shù),以當(dāng)前的實(shí)驗(yàn)和計(jì)算手段,只能做到在有限時(shí)間內(nèi)、局部空間上對(duì)流動(dòng)進(jìn)行片面的觀察,要獲得全時(shí)空變化的物理量則要付出無(wú)法承受的代價(jià);(2)不同物理量之間存在時(shí)間和空間上的關(guān)聯(lián),物理機(jī)制復(fù)雜;(3)湍流的隨機(jī)性、多尺度性,以及尺度之間的耦合,導(dǎo)致汽車(chē)?yán)@流問(wèn)題非常復(fù)雜;(4)汽車(chē)是彈性結(jié)構(gòu),在氣動(dòng)力作用下可產(chǎn)生形變或振動(dòng),這反過(guò)來(lái)會(huì)影響接觸的流體,二者耦合使氣動(dòng)力產(chǎn)生隨機(jī)脈動(dòng),可能引起疲勞、寬頻噪聲等問(wèn)題。為了以較低代價(jià)解決上述挑戰(zhàn)問(wèn)題,人們?cè)O(shè)計(jì)制作了汽車(chē)空氣動(dòng)力學(xué)研究模型,利用實(shí)驗(yàn)和計(jì)算手段開(kāi)展相應(yīng)的空氣動(dòng)力學(xué)研究。與實(shí)車(chē)相比,汽車(chē)空氣動(dòng)力學(xué)模型在外形進(jìn)行了適度的抽象和簡(jiǎn)化,保留了與實(shí)車(chē)一樣或者相似的幾何特征,在相似的前提下確保模型的流體物理特征與實(shí)車(chē)可以互為映射。這樣,可通過(guò)對(duì)模型的流體物理研究,弄清模型空氣動(dòng)力學(xué)機(jī)制和規(guī)律,建立相應(yīng)的理論去理解實(shí)車(chē)的空氣動(dòng)力學(xué)本質(zhì),再利用這些認(rèn)識(shí)和理論為實(shí)車(chē)的創(chuàng)新設(shè)計(jì)提供支持。值得注意的是,在汽車(chē)行業(yè)里稱(chēng)這種模型為汽車(chē)空氣動(dòng)力學(xué)標(biāo)準(zhǔn)模型或參考模型。本文為了不與流體力學(xué)基本概念沖突,稱(chēng)之為汽車(chē)空氣動(dòng)力學(xué)物理模型。
自20世紀(jì)80年代以來(lái),國(guó)際上出現(xiàn)了十幾種具有不同特征的模型(見(jiàn)表1),如Ahmed、 SAE、 Rover、Davis、DOCTON、Ford Block、GM、ASMO、RMIIT、Chrysler、MIRA、DrivAer模型等。利用這些模型,人們對(duì)涉及到的流體物理規(guī)律、氣動(dòng)力產(chǎn)生機(jī)理、氣動(dòng)力或流動(dòng)的控制等問(wèn)題進(jìn)行了廣泛的研究,積累了較為豐富的研究數(shù)據(jù),為建立現(xiàn)代汽車(chē)空氣動(dòng)力學(xué)理論框架奠定了基礎(chǔ)。 表1列出了這十幾種模型的設(shè)計(jì)機(jī)構(gòu)和產(chǎn)生時(shí)間。其中,最著名、最流行的有Ahmed、MIRA和DrivAer等3種模型。
圖2給出了Ahmed、MIRA和DrivAer模型的示意圖。其中,Ahmed模型與實(shí)車(chē)的形狀有很大區(qū)別,也被稱(chēng)為類(lèi)車(chē)體,其基本輪廓為規(guī)則的長(zhǎng)方體,后背是個(gè)傾斜的斜面。模型上沒(méi)有任何實(shí)車(chē)附件,如后視鏡、ABC柱、車(chē)門(mén)、車(chē)窗、天線、車(chē)輪等,是一個(gè)表面光滑、棱角分明的簡(jiǎn)單幾何體。MIRA模型外形已經(jīng)有了車(chē)的外觀,甚至帶有不能轉(zhuǎn)動(dòng)的車(chē)輪。但其局部幾何特征仍與實(shí)車(chē)有較大區(qū)別,大部分區(qū)域都是平面,面與面為直角連接,棱角分明。DrivAer外形與真車(chē)相同,面與面之間過(guò)渡圓滑,有后視鏡、天線、車(chē)門(mén)、車(chē)窗、ABC柱、車(chē)輪等局部結(jié)構(gòu)。上述3種模型形狀從簡(jiǎn)單到復(fù)雜,是3個(gè)典型的汽車(chē)空氣動(dòng)力學(xué)物理模型代表。根據(jù)研究目的不同,其尺寸可以做到1∶1,也可以做成縮比模型。

表1 汽車(chē)空氣動(dòng)力學(xué)物理模型列表Table 1 List of automotive aerodynamic physical models

圖2 Ahmed、MIRA和DrivAer模型的側(cè)輪廓圖
1 基于物理模型的汽車(chē)空氣動(dòng)力學(xué)研究進(jìn)展
本節(jié)主要以Ahmed、MIRA和DrivAer模型為例,梳理汽車(chē)空氣動(dòng)力學(xué)研究成果。
1.1 氣動(dòng)力與繞流流場(chǎng)
氣流繞過(guò)Ahmed、MIRA和DrivAer模型時(shí),因模型幾何外形的變化、流體存在慣性和粘性,導(dǎo)致流動(dòng)在模型不同部位產(chǎn)生分離。分離的流動(dòng)一般含有不同剪切強(qiáng)度、不同尺度的流動(dòng)結(jié)構(gòu),形成包含以渦或波為典型特征結(jié)構(gòu)的流動(dòng)。其中,以大尺度渦為典型特征的流動(dòng)結(jié)構(gòu)一般稱(chēng)為相干結(jié)構(gòu),相干結(jié)構(gòu)與汽車(chē)周?chē)黧w一起沿著流動(dòng)方向持續(xù)很長(zhǎng)的距離,成為渦街。渦街的幾何特征及運(yùn)動(dòng)特性能反映模型上的壓力的分布和變化,因而也體現(xiàn)了氣動(dòng)力的變化。以波為特征的流動(dòng)結(jié)構(gòu)一般出現(xiàn)在距離模型表面很近的薄層里,形成以高低速區(qū)分為特征的條帶,這些結(jié)構(gòu)與壁面摩擦力具有很強(qiáng)的關(guān)聯(lián)。
圖3是文獻(xiàn)[18]總結(jié)的氣流繞過(guò)Ahmed(后背傾角φ= 25°)模型表面后可能生成的時(shí)均渦系結(jié)構(gòu)及所處的空間位置。可以看到,模型頭部棱角的后面可能產(chǎn)生分離泡。流動(dòng)向下游運(yùn)動(dòng)過(guò)程中,會(huì)出現(xiàn)發(fā)卡渦、側(cè)壁渦、大尺度的展向渦、C柱渦等復(fù)雜的渦結(jié)構(gòu),也可能會(huì)因后背傾角不同再次產(chǎn)生分離泡。尾部模型底部的流動(dòng)也會(huì)向上卷起在下半部形成分離泡及分離渦。這些流動(dòng)結(jié)構(gòu)改變了模型表面的壓強(qiáng),不但引起壓差阻力,其向下游的輸運(yùn)和分離也產(chǎn)生了脈動(dòng)力,這些脈動(dòng)力是不可忽視的噪聲源。因Ahmed模型特殊的幾何外形,流動(dòng)從模型棱角處就產(chǎn)生流動(dòng)分離,并產(chǎn)生具有特點(diǎn)的渦結(jié)構(gòu)。在較低雷諾數(shù)時(shí),靠近頭部還可能出現(xiàn)存在不斷自循環(huán)的分離泡,這些分離泡并不穩(wěn)定,隨雷諾數(shù)增加會(huì)破裂消失,但它的出現(xiàn)已經(jīng)改變了Ahmed頭部的氣動(dòng)外形,也改變了繞流的流動(dòng)特征。在模型中部,流動(dòng)會(huì)再度分離并產(chǎn)生渦。尾部的流動(dòng)分離最為明顯,流動(dòng)分離后不再附著在模型上,而是在模型尾部與其他流動(dòng)混合向下游輸運(yùn),形成結(jié)構(gòu)復(fù)雜、幾何特征不明顯、非定常的混合尾流。
Ahmed模型在后背傾角φ=30°時(shí)阻力系數(shù)出現(xiàn)了一個(gè)突然間斷的特殊現(xiàn)象,如圖4所示。當(dāng)φ接近30°時(shí),傾斜的后背也會(huì)產(chǎn)生分離泡,使分離區(qū)增大。具有大量渦結(jié)構(gòu)的區(qū)域反映了當(dāng)?shù)貕簭?qiáng)變低,導(dǎo)致整個(gè)模型阻力增加。當(dāng)φ>30°時(shí),分離泡破裂消失,且其他渦結(jié)構(gòu)所占區(qū)域減少,使模型尾部壓強(qiáng)迅速回升,總阻力也迅速降低。

圖3 Ahmed模型周?chē)牧鲃?dòng)結(jié)構(gòu)[18],Re =(0.45~2.40)×105
Fig.3 A conceptual model of the flow structure around the Ahmed model[18],Re=(0.45~2.40)×105

圖4 Ahmed模型風(fēng)阻系數(shù)隨后背角度的變化關(guān)系[1]
Fig.4 Drag coefficient of an Ahmed model with different base slant angles[1]
文獻(xiàn)[1]還對(duì)Ahmed后背傾角0°<φ≤12.5°和12.5°<φ≤30°時(shí)阻力系數(shù)從平緩到急劇上升的機(jī)理進(jìn)行了研究。這個(gè)機(jī)理就是通過(guò)精細(xì)研究尾部的流動(dòng)結(jié)構(gòu)而獲得的。當(dāng)0°<φ≤12.5°,模型尾流結(jié)構(gòu)基本相同,如圖5(a)所示。氣流在傾斜面上附著較好,到達(dá)尾部曲面后,氣流從尾部垂直面頂邊分離形成尾渦,隨著φ增加,尾渦分離范圍縮小,阻力系數(shù)減小。氣流在尾部垂直面頂邊和底邊分離后進(jìn)入尾流區(qū)形成馬蹄形渦A和B,兩渦與尾部垂直面基本平行并被分離泡D包圍;傾斜表面左右側(cè)邊附近剪切層卷起形成一對(duì)流向渦C。在這個(gè)后背傾角區(qū)間,這些渦結(jié)構(gòu)能穩(wěn)定存在,模型尾部當(dāng)?shù)貕簭?qiáng)基本不變,因此,阻力系數(shù)基本保持不變。當(dāng)12.5°<φ≤30°,可以看到氣流在傾斜面上也產(chǎn)生了分離,出現(xiàn)了分離泡(圖5(b)),改變了模型尾部的氣動(dòng)外形,局部壓強(qiáng)降低;隨后背傾角增加,分離泡增大,渦結(jié)構(gòu)與模型尾部接觸面積增加,使總的壓差阻力增加。

圖5 Ahmed模型不同后背角的尾部流動(dòng)結(jié)構(gòu)示意圖[1]
Fig.5 Flow structures behind an Ahmed model with different base slant angles[1]
Ahmed模型的流場(chǎng)研究結(jié)果可以推論到實(shí)車(chē)。盡管實(shí)車(chē)周?chē)鲃?dòng)會(huì)更復(fù)雜,但其主要的流場(chǎng)結(jié)構(gòu)與該模型展現(xiàn)的類(lèi)似, 與模型一樣,實(shí)車(chē)后背傾角的不同對(duì)尾流的渦系、模型尾部壓力分布有重要影響,僅從阻力方面考慮,后背的傾斜方式關(guān)乎著阻力系數(shù)的高低。
MIRA模型用3種背部構(gòu)型反映乘用車(chē)的3種常用的車(chē)身類(lèi)型,即方背式(Squareback)、快背式(Fastback)和階背式(Notchback),如圖6所示。可以看到,3種后背形狀一方面影響著乘用空間,另一方面對(duì)阻力也有重要的影響[19-20]。與Ahmed模型類(lèi)似,這與其尾部的流動(dòng)結(jié)構(gòu)有關(guān)聯(lián),尾部沿著C柱形成的2個(gè)流向渦,在背部后窗上還會(huì)產(chǎn)生一個(gè)流動(dòng)分離區(qū),模型尾部從下至上也會(huì)形成小的回流區(qū)。值得注意的是,分離區(qū)里含有不同尺度渦的流動(dòng)結(jié)構(gòu)。這些結(jié)構(gòu)都對(duì)模型尾部形成低壓區(qū)有貢獻(xiàn)。低壓區(qū)的大小與流向渦的強(qiáng)度、分離區(qū)大小及內(nèi)部流動(dòng)結(jié)構(gòu)強(qiáng)弱相關(guān),渦越強(qiáng)、分離區(qū)尺寸越大,引起的局部壓力會(huì)越低。
(1)基于詞向量與深度學(xué)習(xí)的語(yǔ)義相似度計(jì)算模型的優(yōu)點(diǎn)是考慮到了文本中語(yǔ)義語(yǔ)法等信息,具有準(zhǔn)確率較高、泛化能力較強(qiáng)的特點(diǎn),并省去了大量的人工提取特征的工作。

圖6 MIRA模型不同后背的相干結(jié)構(gòu)[19]及風(fēng)阻系數(shù)[20]
Fig.6 Flow structures and the drag coefficients of a MIRA model with different backs[19-20]
幾種后背形式相比,快背式具有相對(duì)較低的總阻力系數(shù)。文獻(xiàn)[21]和[22]對(duì)快背式模型周?chē)鲌?chǎng)大尺度渦結(jié)構(gòu)的實(shí)驗(yàn)和數(shù)值計(jì)算結(jié)果進(jìn)行了詳細(xì)的總結(jié)。C柱渦兩側(cè)分別存在轉(zhuǎn)動(dòng)方向相反、強(qiáng)度較小的流向渦,模型后背分離的剪切層會(huì)進(jìn)入尾部形成分離泡,模型兩側(cè)的邊界層也在粘性的作用下逐漸發(fā)生流動(dòng)分離進(jìn)而形成更為復(fù)雜的渦系(見(jiàn)圖7)。 這些復(fù)雜的渦系勢(shì)必會(huì)對(duì)氣動(dòng)性能、車(chē)身污染物的附著及分離、噪聲等有不同程度影響。

圖7 MIRA快背式模型周?chē)臏u結(jié)構(gòu)[21-22]
同樣,DrivAer模型也設(shè)計(jì)了3種不同的背部構(gòu)型,其表面的時(shí)均流動(dòng)結(jié)構(gòu)與MIRA模型基本一致。與前2種模型一樣,其C柱位置同樣形成2個(gè)反向旋轉(zhuǎn)的流向渦,在后窗上形成一個(gè)低壓區(qū)。由于車(chē)頂與和后窗的過(guò)渡連接處相對(duì)光滑,此處的流動(dòng)分離結(jié)構(gòu)相對(duì)較小,相對(duì)MIRA尾部的粗壯、零散的流動(dòng)結(jié)構(gòu),其表面產(chǎn)生的流動(dòng)結(jié)構(gòu)形狀細(xì)小而集中(見(jiàn)圖8)。與MIRA模型類(lèi)似,快背式后背能獲得更小的阻力系數(shù)。

圖8 DrivAer模型Fastback尾部的相干結(jié)構(gòu)[23]及不同后背的風(fēng)阻系數(shù)[24]
Fig.8 Flow structures of the DrivAer fastback model and the drag coefficient of a DrivAer model with different backs[23-24]
此外,模型實(shí)驗(yàn)的代價(jià)低,可以獲得精準(zhǔn)的實(shí)驗(yàn)數(shù)據(jù),已有汽車(chē)空氣動(dòng)力學(xué)物理模型豐富的研究數(shù)據(jù)可以直接被借鑒。例如,深入了解模型周?chē)鲃?dòng)的能量分布,是模型受力、動(dòng)力學(xué)分析一個(gè)重要的輸入條件。通過(guò)對(duì)流動(dòng)的動(dòng)量和能量輸運(yùn)規(guī)律研究,也可以對(duì)類(lèi)似“為什么產(chǎn)生這種流動(dòng)結(jié)構(gòu)”的問(wèn)題進(jìn)行回答。通過(guò)流場(chǎng)能量分析功率譜方法[18]以及DMD[25-26]、POD[27]等方法,可以了解流場(chǎng)中不同能級(jí)的結(jié)構(gòu)組成以及演化特征。如Ahmed模型尾部中軸線上不同法向位置處的速度的功率譜Eu頻譜信息表(見(jiàn)圖9),尾部流動(dòng)是模型不同位置產(chǎn)生的渦系的混合,存在多個(gè)主導(dǎo)頻率。在距離模型尾部不同距離、不同高度位置,主導(dǎo)的頻率也不同,說(shuō)明這些渦系之間存在相互作用,具有明顯的非定常性,這些頻率的空間分布信息可以為流動(dòng)控制方法及控制指標(biāo)的選擇提供依據(jù)[18]。圖10為DrivAer模型流場(chǎng)的POD分解結(jié)果,通過(guò)分析這些模態(tài)能量的占比關(guān)系,可以為開(kāi)發(fā)精度較高的低成本降階數(shù)值模擬技術(shù)提供指導(dǎo)[27]。
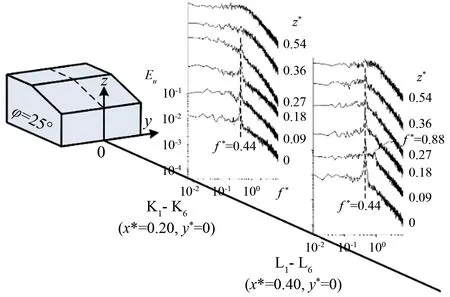
圖9 Ahmed模型尾部不同位置處速度信號(hào)的功率譜特征[18]
Fig.9 The power spectral density functionEuof the hot-wire signal measured at center line in the wake[18]

圖10 DrivAer模型仿真流場(chǎng)的POD分析[27]
1.2 流動(dòng)控制
因受乘坐空間、美學(xué)的限制,在汽車(chē)造型設(shè)計(jì)中,外形的改變空間非常有限。為了追求更低的風(fēng)阻,一個(gè)可能的途徑是進(jìn)行流動(dòng)控制。流動(dòng)控制方法可籠統(tǒng)地分為被動(dòng)控制和主動(dòng)控制2大類(lèi)。控制實(shí)現(xiàn)的方式可以是開(kāi)環(huán)控制也可以是閉環(huán)控制。從控制效果上看,被動(dòng)控制和開(kāi)環(huán)控制方法代價(jià)低、技術(shù)要求低,容易實(shí)現(xiàn),但控制效果往往并不理想。閉環(huán)主動(dòng)控制一直被期望能發(fā)揮更好的作用, 但閉環(huán)主動(dòng)控制技術(shù)非常復(fù)雜、代價(jià)也更高,且可控性本身仍值得探討。流動(dòng)控制的目的基本上是提升需要的力分量指標(biāo),降低消耗能量的分力指標(biāo);也可能需要控制氣動(dòng)力的脈動(dòng)使其平穩(wěn)變化或遠(yuǎn)離共振、顫振,增加車(chē)輛的可操控性,減弱噪聲。不管控制目的如何,機(jī)理上都是通過(guò)抑制流動(dòng)分離、改變流動(dòng)分離位置、延緩流動(dòng)轉(zhuǎn)捩、改變流動(dòng)結(jié)構(gòu)特征、改變流動(dòng)相互作用等方式減弱低壓流動(dòng)結(jié)構(gòu)(如渦)強(qiáng)度、改變其空間位置及運(yùn)動(dòng)特征、減小低壓流動(dòng)結(jié)構(gòu)與物體的接觸面積,從而改變氣動(dòng)力。流動(dòng)控制在航空領(lǐng)域已經(jīng)有成熟的技術(shù)應(yīng)用案例,例如,波音、空客飛機(jī)利用翼稍小翼減弱翼尖渦對(duì)氣動(dòng)力的干擾,機(jī)翼及發(fā)動(dòng)機(jī)外殼布置渦流發(fā)生器,推遲邊界層轉(zhuǎn)捩、減弱橫流不穩(wěn)定性、推遲橫流轉(zhuǎn)捩等。建筑和橋梁的流致振動(dòng)控制、海洋輸油管路振動(dòng)的控制、水下航行器空泡減阻和噪聲抑制等也都屬于流動(dòng)控制。流動(dòng)控制不僅需要精確的理論、精確的實(shí)驗(yàn)方法和計(jì)算方法,也需要電測(cè)技術(shù)和傳感器技術(shù)的配合,因此,流動(dòng)控制具有重要的學(xué)術(shù)意義和工程價(jià)值,其控制理論和方法本身就值得研究。同樣,汽車(chē)空氣動(dòng)力學(xué)物理模型在研發(fā)流動(dòng)控制方法和技術(shù)方面也起著重要的作用,例如,在模型尾部添加擾流板[28-29]、渦流發(fā)生器[30]、安裝射流裝置[31-34],在表面設(shè)置微結(jié)構(gòu)[35],在汽車(chē)前部添加氣壩、底盤(pán)抽吸[36]等都是對(duì)模型表面的剪切層進(jìn)行控制,改變其尾流特性,降低壓差阻力,從而實(shí)現(xiàn)減阻。
文獻(xiàn)[28]在對(duì)Ahmed模型表面的流動(dòng)特征充分了解的基礎(chǔ)上,在尾部?jī)蓚?cè)添加擾流板對(duì)主流向渦進(jìn)行被動(dòng)控制(見(jiàn)圖11)。當(dāng)擾流板與后背的角度接近70°時(shí),擾流板一定程度上影響了兩側(cè)流向渦的形成,減弱了渦的強(qiáng)度,并給背部分離泡自由成長(zhǎng)提供了空間。背部分離區(qū)的流動(dòng)與被削弱的流向渦有很強(qiáng)的相互作用,進(jìn)一步降低了含渦結(jié)構(gòu)的強(qiáng)度,從而使模型尾部的壓強(qiáng)升高,降低了模型的阻力(見(jiàn)圖12)[28]。


圖11 擾流板對(duì)Ahmed模型兩側(cè)流向渦的控制[28]

圖12 阻力系數(shù)隨繞流板傾斜角度的變化[28]
Fig.12 Evolution of the drag of the bluff body as a function of the angle of the flap relative to the slant surface[28]
圖13為Ahmed模型(φ= 25°)尾部采用射流對(duì)尾部分離流進(jìn)行主動(dòng)控制后獲得的尾流結(jié)構(gòu),在尾部采用主動(dòng)射流控制后(藍(lán)色為射流口),模型兩側(cè)的流向渦的尺度和強(qiáng)度均得到了抑制,使背部分離區(qū)的范圍擴(kuò)大,促進(jìn)了模型尾部?jī)A斜表面和底部表面的壓力恢復(fù)。實(shí)驗(yàn)結(jié)果表明,選取適當(dāng)射流位置和射流強(qiáng)度,最大可以獲得29%的減阻效率[34]。
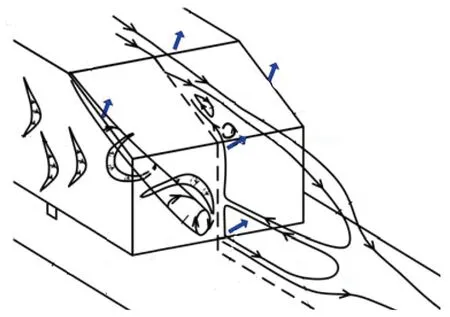
圖13 Ahmed模型尾部進(jìn)行主動(dòng)射流控制[34]
Fig.13 Conceptual model of the flow structure under the combined actuation[34]
1.3 驗(yàn)證計(jì)算及對(duì)標(biāo)
這些汽車(chē)空氣動(dòng)力學(xué)物理模型也給利用CFD研究汽車(chē)空氣動(dòng)力學(xué)問(wèn)題帶來(lái)了方便。
針對(duì)同一模型,可以選用不同計(jì)算方法、比較不同湍流模型的計(jì)算結(jié)果,以獲取最合適的計(jì)算方法。圖14給出了采用不同計(jì)算方法對(duì)Ahmed標(biāo)準(zhǔn)模型表面流動(dòng)結(jié)構(gòu)解析結(jié)果。利用雷諾平均方法可以很好地再現(xiàn)尾部2個(gè)反向旋轉(zhuǎn)的縱向渦,但無(wú)法對(duì)瞬態(tài)流場(chǎng)進(jìn)行精細(xì)解析;SAS-SST方法能夠很好地再現(xiàn)尾部較大的流動(dòng)結(jié)構(gòu),但對(duì)小尺度結(jié)構(gòu)卻很難捕捉;而大渦模擬(LES)方法對(duì)較小尺度的斜向結(jié)構(gòu)和尾跡結(jié)構(gòu)的展現(xiàn)有一定的優(yōu)勢(shì),但得到的阻力值偏差卻較大[37]。

圖14 采用不同湍流模型計(jì)算Ahmed模型的繞流流場(chǎng)[37]
Fig.14 Simulation of flow around the Ahmed model using different turbulence models[37]
正是因?yàn)檫@些模型的便利,可以開(kāi)展難度較高的非定常[38-39]、非穩(wěn)態(tài)[17,18,23,40]流場(chǎng)數(shù)值計(jì)算研究,獲得基于時(shí)間相關(guān)的流場(chǎng)信息,為理解汽車(chē)?yán)@流流場(chǎng)提供了更豐富的素材。如文獻(xiàn)[38]基于Ahmed模型,采用LES模擬獲得了尾部橫截面時(shí)均/瞬時(shí)流場(chǎng)結(jié)構(gòu)以及氣動(dòng)力隨時(shí)間的變化(見(jiàn)圖15)。從瞬時(shí)流場(chǎng)上看,尾部流場(chǎng)結(jié)構(gòu)具有非定常性,阻力系數(shù)呈隨機(jī)的脈動(dòng)變化,側(cè)向力系數(shù)隨時(shí)間也是隨機(jī)變化,且存在較大幅度的低頻波動(dòng),這也充分反映了流場(chǎng)與氣動(dòng)力數(shù)據(jù)之間存在內(nèi)在的聯(lián)系[38]。
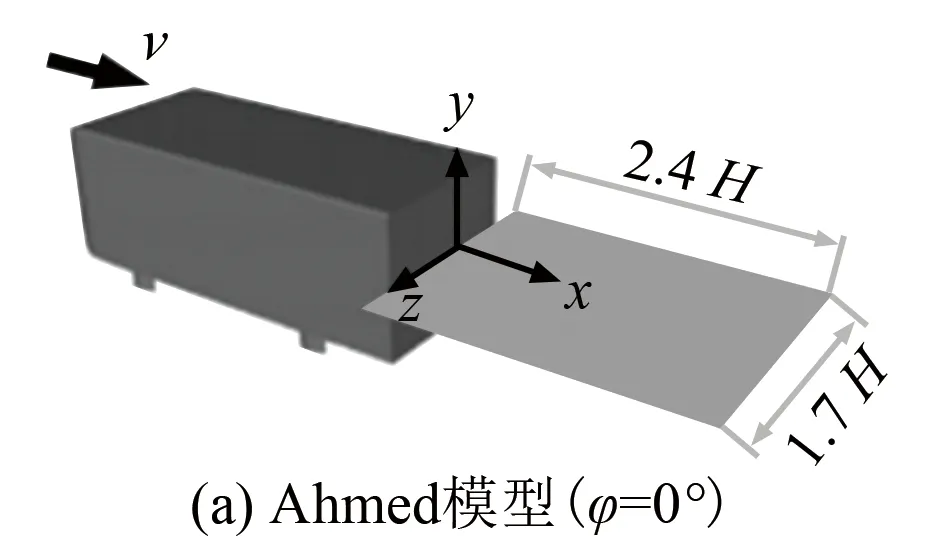


圖15 采用LES方法仿真分析Ahmed模型氣動(dòng)特征[38]
Fig.15 Simulation and analysis of aerodynamic characteristics of Ahmed model by LES method and the plane used to visualize the flow[38]
利用這些標(biāo)準(zhǔn)模型還可以開(kāi)展側(cè)風(fēng)穩(wěn)定性影響[41-42]、汽車(chē)零部件(后視鏡[23],見(jiàn)圖16;車(chē)輪[24],見(jiàn)圖17)對(duì)汽車(chē)流場(chǎng)和氣動(dòng)力的影響等方面的研究。如文獻(xiàn)[41]對(duì)DrivAer模型進(jìn)行的橫側(cè)風(fēng)穩(wěn)定性、非定常氣動(dòng)力的風(fēng)洞實(shí)驗(yàn)和數(shù)值模擬結(jié)果表明,模型橫側(cè)風(fēng)實(shí)驗(yàn)結(jié)果受試驗(yàn)環(huán)境影響較大,穩(wěn)態(tài)計(jì)算方法難以預(yù)測(cè)其氣動(dòng)力和力矩的動(dòng)態(tài)特性;文獻(xiàn)[42]比較了方背式和階背式構(gòu)型DrivAer汽車(chē)模型轉(zhuǎn)彎過(guò)程的氣動(dòng)性能,結(jié)果表明汽車(chē)在過(guò)彎時(shí)風(fēng)阻和穩(wěn)定性與直行時(shí)存在較大的差異,且方背式構(gòu)型的汽車(chē)的氣動(dòng)特性受彎道曲率的影響更大。
此外,汽車(chē)空氣動(dòng)力學(xué)物理模型在CFD計(jì)算程序開(kāi)發(fā)上也發(fā)揮了重要的作用,為驗(yàn)證CFD代碼提供了測(cè)試算例。汽車(chē)CFD技術(shù)早期借鑒了許多航空CFD技術(shù),但兩者存在一定的差異,而汽車(chē)空氣動(dòng)力學(xué)物理模型豐富的氣動(dòng)力數(shù)據(jù)就成了測(cè)試和改進(jìn)CFD代碼準(zhǔn)確性、考察數(shù)值仿真中的網(wǎng)格和湍流模型正確性的對(duì)標(biāo)依據(jù)。


圖16 后視鏡對(duì)車(chē)窗表面壓力系數(shù)分布的影響[23]
Fig.16 Effect of rearview mirror on distribution of the pressure coefficient at the side window[23]

圖17 車(chē)輪轉(zhuǎn)動(dòng)狀態(tài)對(duì)輪倉(cāng)內(nèi)表面壓力的影響[24]
1.4 風(fēng)洞實(shí)驗(yàn)對(duì)標(biāo)
風(fēng)洞、實(shí)驗(yàn)?zāi)P汀y(cè)試手段、實(shí)驗(yàn)者等的不同都可能對(duì)實(shí)驗(yàn)結(jié)果的不確定性有所貢獻(xiàn),而如何控制這些因素產(chǎn)生的不確定性一直是個(gè)難題。利用統(tǒng)一的實(shí)驗(yàn)?zāi)P停梢詼p少因模型帶來(lái)的不確定性,因此,這些汽車(chē)空氣動(dòng)力學(xué)物理模型可以用于風(fēng)洞實(shí)驗(yàn)的對(duì)標(biāo)工作。由于模型外形、尺寸等數(shù)據(jù)一致,可以很好地避免加工誤差帶來(lái)數(shù)據(jù)的不確定性。從大型汽車(chē)風(fēng)洞的使用經(jīng)驗(yàn)來(lái)看,不少風(fēng)洞在建設(shè)和運(yùn)行過(guò)程中均會(huì)選用一款或多款模型進(jìn)行對(duì)標(biāo)測(cè)試,確保風(fēng)洞實(shí)驗(yàn)段流場(chǎng)指標(biāo)或測(cè)試方法滿足要求,如MIRA風(fēng)洞每3個(gè)月會(huì)使用MIRA全尺寸模型對(duì)風(fēng)洞的流場(chǎng)、測(cè)試技術(shù)進(jìn)行一次校準(zhǔn)。
汽車(chē)空氣動(dòng)力學(xué)物理模型也可用于分析風(fēng)洞實(shí)驗(yàn)段阻塞比的影響[2,12,43],地面效應(yīng)的影響[44]、實(shí)驗(yàn)段壓力梯度對(duì)測(cè)試結(jié)果的影響[45-47]等實(shí)驗(yàn)。圖18為利用DrivAer模型研究風(fēng)洞實(shí)驗(yàn)段阻塞比對(duì)其氣動(dòng)力測(cè)試的影響,該數(shù)據(jù)可為風(fēng)洞阻塞比修正方法提供參考[43]。文獻(xiàn)[48-49]使用MIRA模型,研究了風(fēng)洞邊界層厚度對(duì)氣動(dòng)力測(cè)量結(jié)果的影響,為汽車(chē)風(fēng)洞設(shè)計(jì)邊界層控制系統(tǒng)提供了參考依據(jù)。
1.5 多車(chē)相互作用空氣動(dòng)力學(xué)研究
基于物理模型還可以進(jìn)行多車(chē)相互作用(跟車(chē)、會(huì)車(chē)、超車(chē)等)空氣動(dòng)力學(xué)問(wèn)題研究,分析評(píng)估汽車(chē)在多車(chē)相互作用下的行駛安全。文獻(xiàn)[50]利用類(lèi)車(chē)體模型,采用風(fēng)洞實(shí)驗(yàn)測(cè)量了不同跟車(chē)距離下模型表面的壓力分布、側(cè)向力和偏航力矩,明確了跟車(chē)距離會(huì)嚴(yán)重影響車(chē)輛的行駛穩(wěn)定性。文獻(xiàn)[51]則采用數(shù)值仿真的方法研究了DrivAer模型超越卡車(chē)過(guò)程的空氣動(dòng)力學(xué)問(wèn)題,分析了平均流場(chǎng)、瞬態(tài)流場(chǎng)、車(chē)身表面壓力、阻力、升力和側(cè)向力以及相應(yīng)的力矩在超車(chē)過(guò)程變化。圖19給出了2車(chē)不同相對(duì)位置(x/L)時(shí)的速度云圖,其中DrivAer模型在超車(chē)過(guò)程中,其阻力系數(shù)會(huì)先減小后增大,這些結(jié)果對(duì)制定交通規(guī)則也有一定的參考作用。

圖18 阻塞比AM/AN對(duì)DrivAer模型氣動(dòng)力測(cè)試的影響[43]
Fig.18 Effect of jet expansion on the drag coefficient ΔCDfor different blockage ratiosAM/AN[43]

(a) 位置x/L=-0.8

(b) 位置x/L=0.39
圖19 基于DrivAer模型模擬轎車(chē)超越卡車(chē)過(guò)程中兩車(chē)周?chē)鲌?chǎng)的變化[51]
Fig.19 Instantaneous velocity field when a car overtaking truck based on DrivAer model[51]
1.6 其他與空氣動(dòng)力學(xué)有關(guān)的研究
基于汽車(chē)物理模型還可以開(kāi)展風(fēng)噪[52-54]、污染(車(chē)窗、車(chē)身、輪轂、后視鏡等)[55]、通風(fēng)與冷卻[25]等方面的研究。如圖20所示,基于DrivAer模型,文獻(xiàn)[52]研究了汽車(chē)輪胎噪聲預(yù)測(cè)的方法,并對(duì)比分析輪轂造型、轉(zhuǎn)動(dòng)狀態(tài)對(duì)噪聲強(qiáng)度的影響,認(rèn)為旋轉(zhuǎn)狀態(tài)的開(kāi)式輪轂噪音水平更高;文獻(xiàn)[53-54]探究了汽車(chē)在恒速和加速狀態(tài)下的輪胎噪聲情況,綜合比較了輪轂襯套、發(fā)動(dòng)機(jī)下護(hù)罩、車(chē)身下面板和后備箱下面板等處的降噪措施。

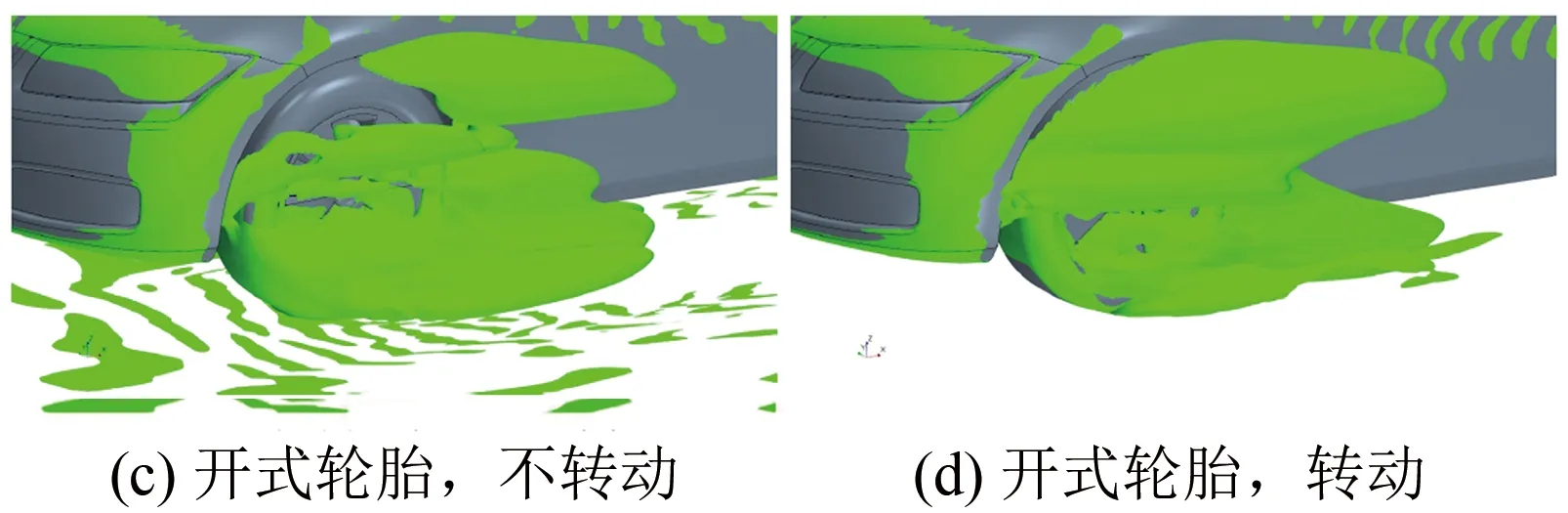
圖20 不同車(chē)輪構(gòu)型和轉(zhuǎn)動(dòng)狀態(tài)下的70 dB等噪聲面分布[52]
Fig.20 Acoustic power sound sources at 70 dB with wheel configurations and rotation states[52]
在污染控制研究方面,文獻(xiàn)[55]基于改型MIRA模型采用數(shù)值方法研究車(chē)輪濺水及其對(duì)車(chē)身表面的污染,研究發(fā)現(xiàn)車(chē)輪濺起液滴的運(yùn)動(dòng)軌跡與車(chē)身外流場(chǎng)中的氣流運(yùn)動(dòng)軌跡密切相關(guān),車(chē)身兩側(cè)的車(chē)門(mén)區(qū)域、尾部的車(chē)燈區(qū)域是污染最容易富集的區(qū)域,而通過(guò)增加輪罩護(hù)板、車(chē)尾頂部導(dǎo)流片、車(chē)尾底部擾流板、車(chē)尾兩側(cè)導(dǎo)流片可降低車(chē)身表面污染程度。
最新的DrivAer模型設(shè)置了發(fā)動(dòng)機(jī)熱管理模塊,進(jìn)一步拓展了這些物理模型的使用范圍,如文獻(xiàn)[25]通過(guò)實(shí)驗(yàn)和數(shù)值仿真方法比較了冷卻器出現(xiàn)流量泄漏時(shí)對(duì)底盤(pán)表面的壓力分布、冷卻阻力和升力的影響(圖21)。
2 存在的問(wèn)題
盡管基于物理模型的汽車(chē)空氣動(dòng)力學(xué)研究產(chǎn)生了許多實(shí)驗(yàn)和計(jì)算數(shù)據(jù),但仍沒(méi)有在此基礎(chǔ)上形成系統(tǒng)的理論。研究者選用的研究模型不統(tǒng)一,研究數(shù)據(jù)不通用,難以形成規(guī)律性認(rèn)識(shí),為理論的形成制造了困難。而且,已有的研究中也有些問(wèn)題缺乏機(jī)理性的認(rèn)識(shí),需要深入研究。例如:
(1) Ahmed模型阻力系數(shù)在后背傾角為30°時(shí)出現(xiàn)間斷,目前的研究只有阻力系數(shù)變化和定性流場(chǎng)的結(jié)果,沒(méi)有針對(duì)性的機(jī)理解釋。這個(gè)問(wèn)題可能需要利用流動(dòng)穩(wěn)定性理論建立相應(yīng)的數(shù)學(xué)模型,進(jìn)行求解計(jì)算,以獲得分叉解。即便是實(shí)驗(yàn)研究,后背傾角在30°附近攝動(dòng)時(shí)的阻力系數(shù)規(guī)律也不清楚,而對(duì)這種臨界點(diǎn)附近流動(dòng)狀態(tài)的理解顯然對(duì)加深理解汽車(chē)空氣動(dòng)力學(xué)有幫助。


圖21 冷卻器泄漏對(duì)冷卻器周?chē)鲌?chǎng)和底盤(pán)高壓力系數(shù)分布的影響[25]: A. 進(jìn)氣格柵封閉, B. 進(jìn)氣格柵開(kāi)啟(冷卻器無(wú)泄漏), C. 進(jìn)氣格柵開(kāi)啟(冷卻器泄漏)
Fig.21 Velocity magnitude in the center plane and pressure coefficient distribution of the three simulated setups[25]
(2) 汽車(chē)行駛過(guò)程中顆粒物、污水對(duì)車(chē)身的污染研究中,顆粒物或污水在車(chē)身表面的聚集特征仍不清楚。當(dāng)前的研究主要基于運(yùn)動(dòng)學(xué)分析,得到了污水滴濺落的運(yùn)動(dòng)特征,對(duì)接觸到車(chē)身后的運(yùn)動(dòng)及對(duì)邊界層流動(dòng)的影響也不清楚。
(3) 從風(fēng)洞實(shí)驗(yàn)獲得的汽車(chē)模型阻力系數(shù),是在比較理想的流動(dòng)環(huán)境中獲得的,與汽車(chē)行駛過(guò)程所處的真實(shí)環(huán)境不同。因此,汽車(chē)工業(yè)也用道路滑行的方法進(jìn)行阻力測(cè)試,其中包括風(fēng)阻。風(fēng)洞實(shí)驗(yàn)結(jié)果與道路測(cè)試結(jié)果之間的相關(guān)性目前還缺乏系統(tǒng)研究,經(jīng)常是做完風(fēng)洞實(shí)驗(yàn)還要做道路測(cè)試,造成巨大的浪費(fèi)。
(4) 與汽車(chē)聲學(xué)有關(guān)的科學(xué)問(wèn)題,嚴(yán)格地講,模型實(shí)驗(yàn)與實(shí)車(chē)實(shí)驗(yàn)是不相似的,但如果能建立其中近似的相似關(guān)系,就可以利用模型實(shí)驗(yàn)結(jié)果近似地預(yù)測(cè)實(shí)車(chē)結(jié)果,必定會(huì)節(jié)省資源。
除此之外,因?yàn)槠?chē)空氣動(dòng)力學(xué)尚無(wú)系統(tǒng)的理論,只有比較多的零散數(shù)據(jù),所以汽車(chē)空氣動(dòng)力學(xué)在汽車(chē)造型階段的作用無(wú)法突顯。假設(shè)汽車(chē)造型設(shè)計(jì)價(jià)值函數(shù)I的形式為:

(3)
其中,Φ表示汽車(chē)空氣動(dòng)力學(xué)指標(biāo)函數(shù),φi(i= 1,2,…n)代表其他指標(biāo),如美學(xué)、成本、舒適、哲學(xué)、文化等。Φ也有可能和其他一些指標(biāo)相關(guān),可以寫(xiě)成如下函數(shù):

(4)
汽車(chē)最終的優(yōu)化設(shè)計(jì)就是對(duì)式(3)的泛函求變分,即獲得變分I= 0 時(shí)各個(gè)指標(biāo)函數(shù)應(yīng)該滿足的條件。這里面要發(fā)揮空氣動(dòng)力學(xué)的作用,就必須尋找式(4)函數(shù)的顯式表達(dá),這一點(diǎn)與汽車(chē)空氣動(dòng)力學(xué)研究的系統(tǒng)性有關(guān)。只有全面的數(shù)據(jù)和系統(tǒng)的理論才能幫助設(shè)計(jì)師利用好汽車(chē)空氣動(dòng)力學(xué)指標(biāo)。
3 展望
當(dāng)前,基于汽車(chē)物理模型進(jìn)行的空氣動(dòng)力學(xué)研究取得了豐碩的成果,積累了許多重要的數(shù)據(jù)。但還缺乏一個(gè)清晰的主線,將這些研究凝結(jié)起來(lái),形成系統(tǒng)的理論。總的來(lái)看,未來(lái)的汽車(chē)空氣動(dòng)力學(xué)研究需要至少在3個(gè)方面盡快形成成熟的知識(shí)體系:
(1) 基于空氣動(dòng)力學(xué)指導(dǎo)的汽車(chē)造型理論。當(dāng)前汽車(chē)設(shè)計(jì)首要考慮的是成本、市場(chǎng)、實(shí)用,需要融和美學(xué)、價(jià)值觀等考慮,為空氣動(dòng)力學(xué)的施展限定了空間,如何利用好這一空間,需要經(jīng)得住考驗(yàn)的、實(shí)用的理論。這方面,可以憑借對(duì)模型研究積累大量的數(shù)據(jù),形成系統(tǒng)的理論,指導(dǎo)造型設(shè)計(jì)。
(2) 通用的空氣動(dòng)力學(xué)物理模型建設(shè)的必要性。當(dāng)前,汽車(chē)企業(yè)眾多,開(kāi)發(fā)的模型不盡相同。在開(kāi)發(fā)過(guò)程中,進(jìn)行大量重復(fù)的風(fēng)洞實(shí)驗(yàn)和計(jì)算,造成資源的極大浪費(fèi)。利用模型幫助設(shè)計(jì)時(shí),也會(huì)因模型的不一致,造成實(shí)驗(yàn)和計(jì)算結(jié)果出現(xiàn)很多不好控制的不確定性。在制定實(shí)驗(yàn)標(biāo)準(zhǔn)、計(jì)算標(biāo)準(zhǔn)上也會(huì)造成諸多的不一致,對(duì)行業(yè)內(nèi)技術(shù)交流和溝通制造了障礙,造成各說(shuō)各話的局面。 如果存在一個(gè)通用的空氣動(dòng)力學(xué)模型,針對(duì)模型可以統(tǒng)一實(shí)驗(yàn)和計(jì)算標(biāo)準(zhǔn),更容易積累相關(guān)性強(qiáng)的數(shù)據(jù),有利于理論的建立。同時(shí),也會(huì)成為行業(yè)交流的語(yǔ)言,使資源得到更合理的利用。
(3) 面向未來(lái)汽車(chē)的發(fā)展,利用模型進(jìn)行空氣動(dòng)力學(xué)數(shù)據(jù)的儲(chǔ)備。無(wú)論是傳統(tǒng)的汽車(chē),還是當(dāng)前的新能源汽車(chē)、未來(lái)的飛行汽車(chē),空氣動(dòng)力學(xué)的作用越來(lái)越重要,為了優(yōu)化設(shè)計(jì),儲(chǔ)備空氣動(dòng)力學(xué)數(shù)據(jù),進(jìn)行大數(shù)據(jù)分析,為人工智能控制、無(wú)人駕駛技術(shù)積累數(shù)據(jù),是至關(guān)重要的。這一目的,可以先通過(guò)通用的汽車(chē)空氣動(dòng)力學(xué)物理模型實(shí)現(xiàn),利用通用模型進(jìn)行實(shí)驗(yàn)和計(jì)算研究,積累數(shù)據(jù),建立數(shù)據(jù)庫(kù),實(shí)現(xiàn)數(shù)據(jù)共享,為未來(lái)實(shí)現(xiàn)利用人工智能進(jìn)行無(wú)人駕駛積累學(xué)習(xí)和訓(xùn)練數(shù)據(jù)。
猜你喜歡
小獼猴智力畫(huà)刊(2022年9期)2022-11-04 02:31:42
哲學(xué)評(píng)論(2021年2期)2021-08-22 01:53:34
中華詩(shī)詞(2019年7期)2019-11-25 01:43:04
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
兒童時(shí)代·快樂(lè)苗苗(2017年7期)2018-01-24 18:28:45
影視與戲劇評(píng)論(2016年0期)2016-11-23 05:26:01
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
作文大王·低年級(jí)(2016年4期)2016-04-18 00:24:37
現(xiàn)代企業(yè)(2015年9期)2015-02-28 18:56:50
