基于實測車流的懸索橋黏滯阻尼器多目標控制研究
2020-03-31 06:58:16黃平明龍關旭劉煥舉孫亞民
公路交通科技 2020年3期
趙 越,黃平明,龍關旭,劉煥舉,孫亞民
(1.長安大學 公路學院,陜西 西安 710064;2.山東高速科技發展集團有限公司,山東 濟南 250002)
0 引言
現代大跨徑橋梁自重越來越輕,跨徑越來越大,結構振動成為影響大跨徑橋梁運營安全的關鍵因素。黏滯阻尼器自2000年在重慶鵝公巖長江大橋使用至今,作為一種常用的減震消能裝置已廣泛應用于橋梁抗震領域,其設置可以有效地減少結構在荷載作用下的振動響應,消耗外界輸入的能量,保障結構安全運營。黏滯阻尼器設計時一般主要考慮地震荷載及風荷載作用下的減震控制效果[1-2]。近年來,通過多座大跨徑橋梁的運營經驗發現,黏滯阻尼器不僅可以在地震和風荷載作用下發揮效果,對車流等荷載作用下的結構響應也會產生影響。特別是對于大跨徑懸索橋,在活荷載作用下加勁梁梁端產生顯著的縱向位移是其結構本身的特征,而黏滯阻尼器可以有效減小懸索橋加勁梁梁端的位移響應,故考慮車輛荷載作用效應,充分發揮黏滯阻尼器的性能對于大跨徑懸索橋的安全運營具有重要意義。
由于黏滯阻尼器的單向變形和受力特點,其在橋梁上的應用主要用于控制主梁縱向的響應,通常黏滯阻尼器都在主梁與橋墩(臺)或相鄰主梁之間縱向設置[3-4]。對于大跨徑懸索橋,其橫向的穩定性控制可以通過設置專用的抗風支座實現,無需將阻尼器成角度設置以保證其明確的受力和作用方向,所以關于阻尼器用于側向控制的研究相對較少。已有的研究主要集中于黏滯阻尼器對橋梁結構在風荷載或地震荷載作用下響應的影響。黏滯阻尼器的作用方式決定了其振動控制效果主要通過試算方式進行,根據結構關鍵指標的響應情況驗證黏滯阻尼器的設置是否滿足要求。文獻[4-5]分析了風荷載及地震荷載作用下黏滯阻尼器對大跨斜拉橋的振動控制效果,結果顯示阻尼器對結構不同指標控制效果并不一致,阻尼器參數對其控制效果有重要影響,在地震和風荷載作用下存在最優阻尼器參數區間。文獻[6]研究了大跨度公鐵兩用斜拉橋的黏滯阻尼器效應,指出阻尼器參數對列車制動力作用下主梁縱向位移會產生影響。文獻[7-8]的研究指出,黏滯阻尼器可減少車輛作用下主梁的梁端位移,相應地減少伸縮縫變形的耗損,增加伸縮縫使用壽命。文獻[9]的研究顯示,考慮日常運營狀態下梁端的縱向位移速度以確定設計最大阻尼力可改善阻尼器的耐久性。由于車流荷載對結構的作用方式與地震或風荷載有本質的區別,前者是長期的持續性作用,后者則具有突發性、高強度的作用特點,故二者作用下結構響應需關注的重點也不盡相同。同時車流作用下阻尼器參數對結構不同指標控制效果不一致,因此為更好地發揮黏滯阻尼器的性能,明確車流作用下結構響應的關鍵指標,選擇黏滯阻尼器最優參數使得車流作用下的結構綜合響應達到最佳十分必要。
本研究以一座典型大跨徑懸索橋為工程背景,研究車流作用下黏滯阻尼器的振動控制效果,利用交通荷載監測系統采集的實際交通流數據,篩選出典型時段的車流,基于不同車流工況模擬形成高真實度車流,利用ANSYS的瞬態分析功能以集中力的方式模擬車輛各軸軸重進行加載,重點分析車流作用下黏滯阻尼器參數變化對橋梁結構響應的影響,進而對各阻尼器參數方案進行評價,采用變異系數法及TOPSIS法確定結構各指標權重,實現黏滯阻尼器的多目標優化控制。
1 車流作用下黏滯阻尼器作用分析
1.1 有限元模型
本研究以一座大跨徑地錨式鋼桁架懸索橋為背景,如圖1所示。該橋主跨 896 m,主橋僅1跨鋼桁架主梁,單向2.41%的大縱坡,跨中設置剛性中央扣。利用有限元軟件ANSYS建立全橋模型進行分析。采用Beam4單元模擬主塔、主梁、蓋板和墩柱;使用Link10單元模擬主纜和吊桿;通過Mass21單元模擬欄桿和橋面鋪裝;采用彈簧單元Combin14模擬伸縮縫。由于懸索橋主纜重力剛度對全橋影響較大,為保證結果的準確性,根據實測索力設置主纜和吊桿單元一定的初始應變。黏滯阻尼器一般布置方案為塔-梁處或輔助墩處順橋向布置。根據該橋結構特點,在主跨兩側梁端塔-梁處順橋向布置兩個黏滯流體阻尼器,全橋共4個,如圖2所示。
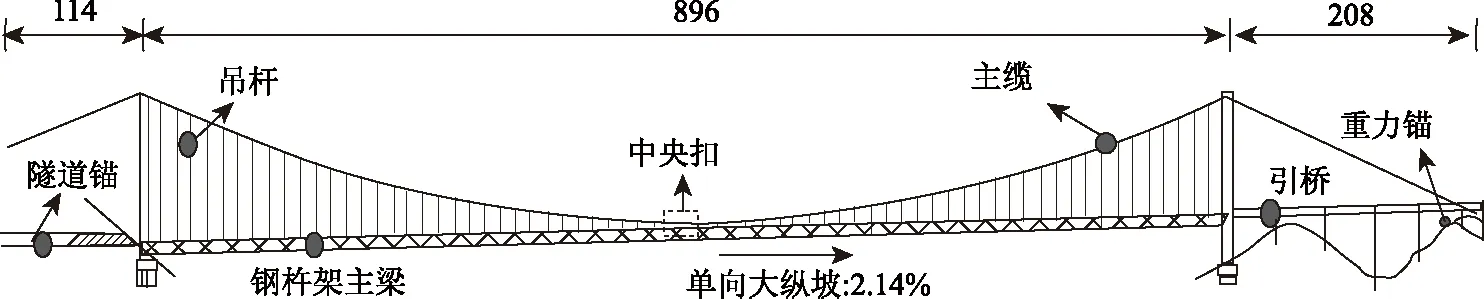
圖1 懸索橋示意圖(單位:m)Fig.1 Schematic diagram of suspension bridge (unit: m)
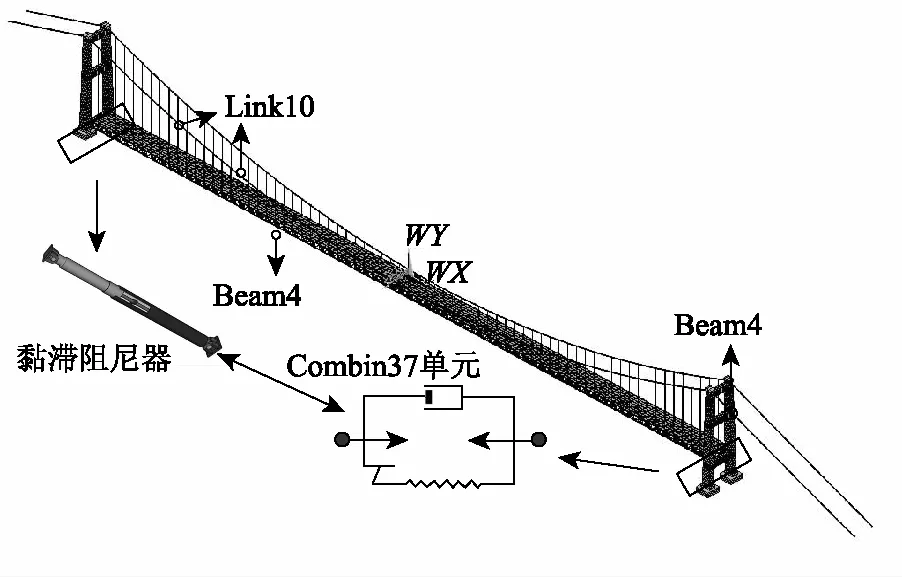
圖2 有限元模型Fig.2 FE model
黏滯阻尼器的基本模擬方法及計算理論目前已較為成熟,由早期的線性模型發展至非線性模型,包括Maxwell模型、Kelvin模型、Wiechert模型和分數微分模型等,本研究采用規范[10]所推薦的阻尼力計算公式:
F=K|v|αsign(v),
(1)
式中,F為阻尼力;K為阻尼系數;v為相對速度;α為速度指數,其范圍為0.1~1。
采用Combin37單元可準確模擬黏滯阻尼器的特性[11]。定義合適的單元選項及實常數后,單元阻尼力如式(2),其他實常數均取為0,定義好C1和C2即可準確模擬式(1)的黏滯阻尼器受力特性。
F=C1|v|1+C2sign(v),
(2)
式中,C1為ANSYS中COMBIN37單元的9號實常數;C2為ANSYS中COMBIN37單元的10號實常數。
1.2 基于實測數據的交通流模擬
相比中小跨徑橋梁,大跨徑橋梁在車流作用下的響應主要受車流密度及車輛總重的影響[12]。為了更真實地分析車輛作用下黏滯阻尼器的效應,本研究基于交通荷載監測系統獲得的某地區實測交通流,選取其中代表性時段的數據模擬形成車流進行加載,具體流程見圖3。
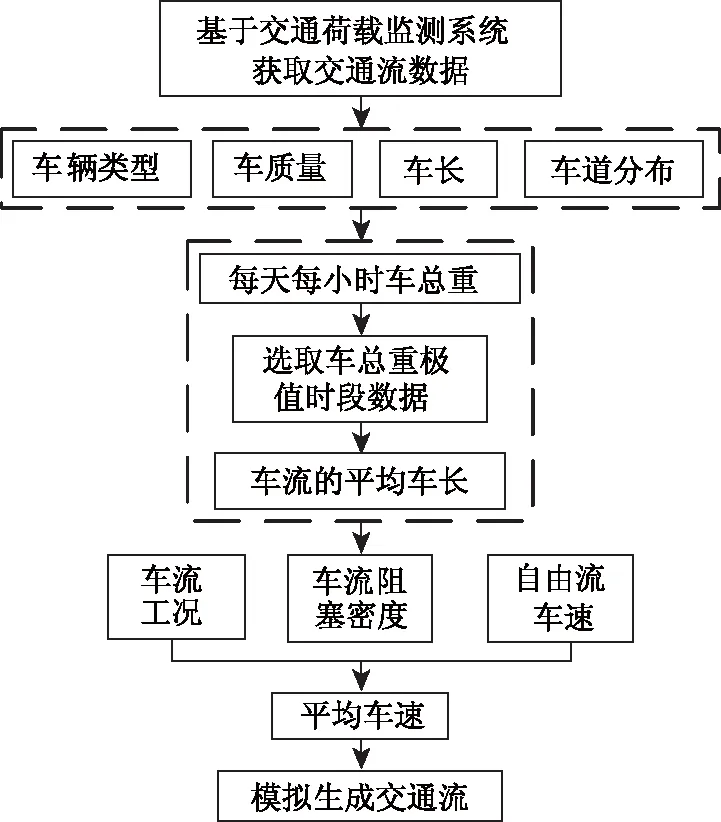
圖3 交通流模擬流程Fig.3 Flowchart of traffic flow simulation
圖4為將所采集的數據進行分時段分車道統計得到的每小時車輛總重極值。
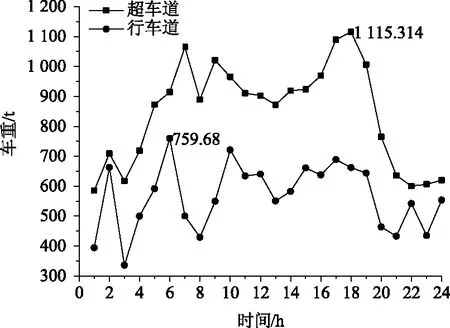
圖4 小時車輛總重極值Fig.4 Extreme values of hourly gross vehicle weight
選取極值時段的車流數據,計算得到如圖5所示的不同時刻車長分布頻率圖,并計算該時段超車道和行車道的平均車長數據。為保證車輛安全行駛,擁堵車速為vd為9 km/h[13]。
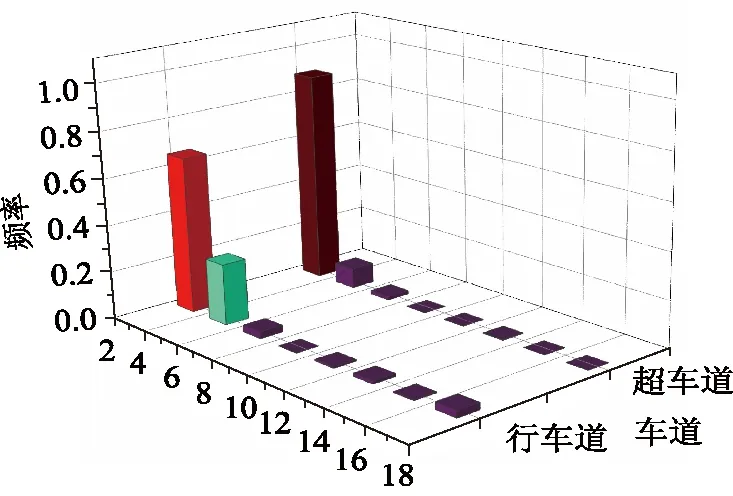
圖5 車長分布Fig.5 Distribution of vehicle length
根據式(3)得到車輛阻塞密度Kd:
(3)
式中,d1為實測平均車長;d2為車輛間最短安全距離,通常由平均車速v和駕駛人制動反應時間t確定,在本研究中,設駕駛員反應時間滿足正態分布[14-15],選取t為2.2 s。
實際橋梁上下游交通狀況并不一致,本研究定義每側的行車道與超車道車流狀況一致,上下游兩側不一致。將車流工況劃分為密集車流0.7Kd和稀疏車流0.2Kd,一側采用密集車流,另一側采用稀疏車流雙向對開。結合格林希爾茲經典模型(式4)計算車流密度對應的平均車速。最終形成基于實測交通流的車流關鍵參數,見表1。
(4)
式中,Kd為車輛阻塞密度;K為車流密度;vf為自由流車速,在這里取設計速度100 km/h。
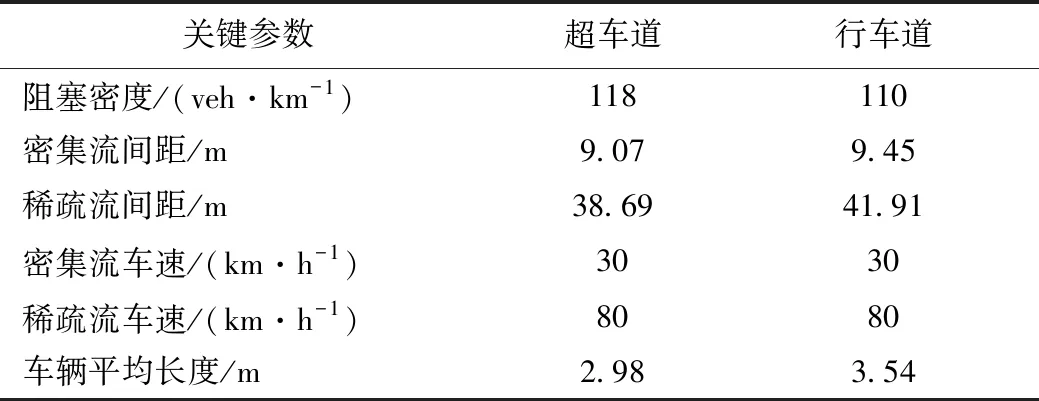
表1 交通流關鍵參數Tab.1 Key parameters of traffic flow
采用MATLAB生成車流數據,利用ANSYS中的瞬態分析功能,以集中力的方式模擬車輛各軸軸重進行加載。
1.3 車輪荷載加載
在實際荷載加載過程中,車輛作用位置不一定在橋梁有限元模型的節點處,當工況較多時,荷載信息輸入繁多,容易出錯,因此本研究基于ANSYS參數化設計語言編制車輛自動識別加載的宏命令。
車流作用下公路車橋耦合時的交通流量大,車流隨機分布性強,分析車橋耦合的關鍵問題在于車橋接觸點的定位和加載。對于常用的模擬橋梁結構的有限元模型,例如梁格模型、實體模型或板殼單元模型,在車輛做靜力加載時,車輛荷載通常簡化為集中力向臨近4個節點分配,見圖6。在二維平面內四邊形荷載分擔方式與位移插值函數一致。當車輪荷載P作用于坐標(x,y)處時,引入4節點等參元映射關系,見圖7。
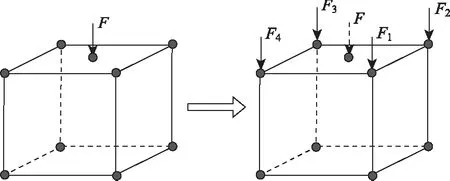
圖6 車輪荷載分配示意圖Fig.6 Schematic diagram of wheel load distribution注: F為車輛荷載簡化的集中力;F1,F2,F3,F4分別為分配至4個節點的作用力。
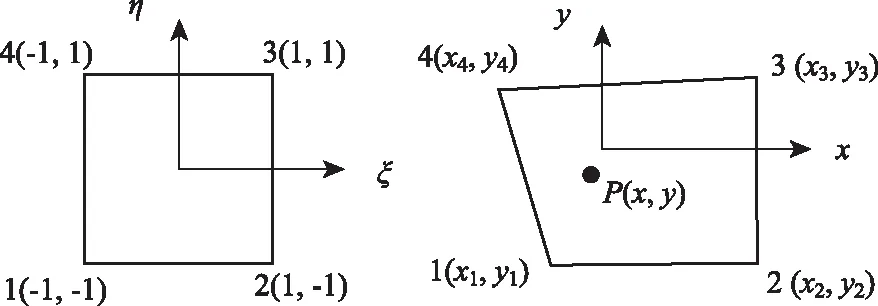
圖7 四節點等參元關系Fig.7 Four-node isoparametric element relation
坐標映射關系如式(5)所示:
(5)
式中,x,y為車輪荷載著力點坐標;Ni(i=1,2,3,4)為車輪荷載P臨近4點的分配系數;xi,yi為臨近4點的物理坐標;ξ,η為x,y從四邊形單元映射到母單元對應的值;ξi,ηi分別為母單元的第i個節點的橫、縱位置。
雙線性方程組式(5)可通過牛頓迭代法[16]求解,進而計算出分配系數Ni,從而實現車輪荷載的自動加載。
2 車流工況下黏滯阻尼器參數分析
黏滯流體阻尼器設計規范[8]中將阻尼器按速度指數分為7級,分別為0.1,0.2,0.3,0.4,0.5,0.6和1,對阻尼系數則無明確規定。本研究選擇7級速度指數下,阻尼系數C分別為1 000,2 500,5 000,7 000,10 000,15 000,20 000 kN/(m/s)α, 計算結構的響應。
2.1 黏滯阻尼器阻尼力分析
阻尼力是黏滯阻尼器性能的關鍵指標,規范中對黏滯阻尼器按照阻尼力分為17種規格, 最大為4 000 kN。本研究計算車流作用下各參數黏滯阻尼器的最大阻尼力。
圖8為車流作用下不同速度指數阻尼器的阻尼力時程曲線。可見各參數阻尼力相差較為明顯,但總體變化趨勢基本一致。
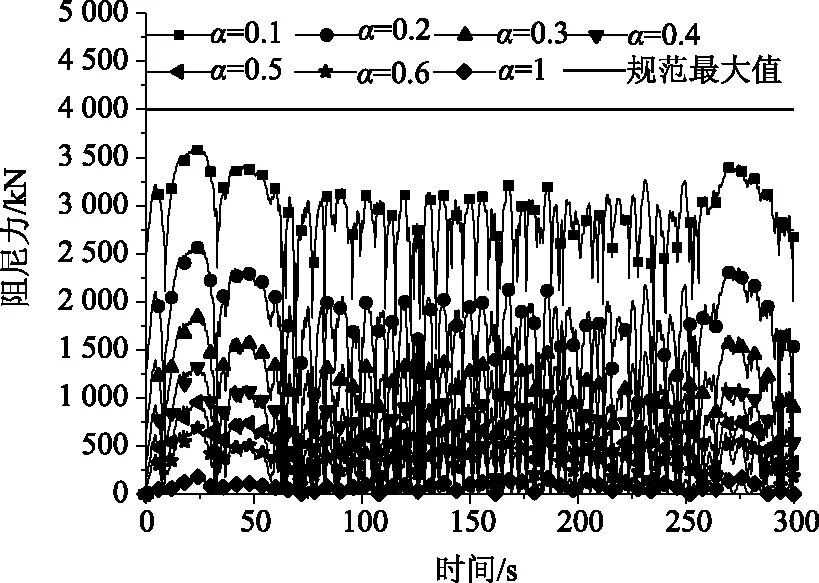
圖8 不同速度指數阻尼力時程曲線[C=5 000 kN/(m/s)α]Fig.8 Time history curves of damper force in different velocity exponents [C=5 000 kN/(m/s)α]
圖9給出了各參數最大阻尼力變化情況。阻尼力隨速度指數的減小而增大,且與阻尼系數呈線性變化,速度指數越小,隨阻尼系數增大的速度越快。部分參數阻尼器的最大阻尼力已經超出了規范分類的常規阻尼器,本研究出于研究目的依然予以分析。
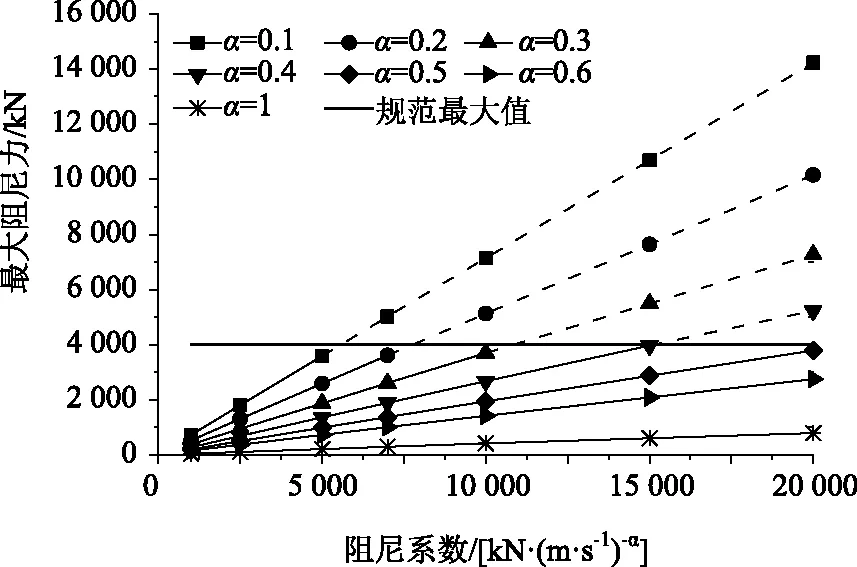
圖9 車流下各參數最大阻尼力Fig.9 Maximum damper force of different parameters under traffic flow
圖10為不同速度指數阻尼力與速度的關系。速度小于1 m/s時,速度指數越小,阻尼力越大。速度大于1 m/s時,速度指數越大,阻尼力越大。阻尼力與速度的關系接近于線性變化。
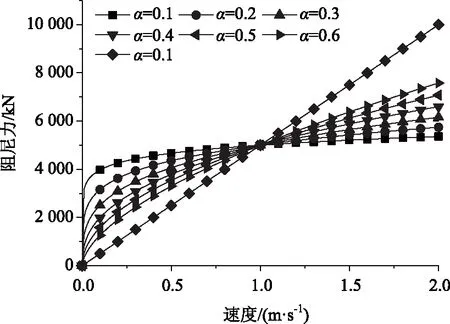
圖10 阻尼力與速度指數關系[C=5 000 kN/(m/s)α]Fig.10 Relationship between damper force and velocity exponent [C=5 000 kN/(m/s)α]
表2給出了部分參數阻尼器在車流作用下的阻尼器速度。可見車流作用下阻尼器的運動速度遠小于1 m/s,此范圍內速度指數越小,阻尼力越大,阻尼力與速度的關系呈拋物線變化。
表2 車流下阻尼器最大速度(單位:m/s)Tab.2 Maximum damper velocity under traffic flow(unit: m/s)
2.2 黏滯阻尼器控制效果分析
截取車流工況下結構的關鍵參數指標,選取主梁、主塔、主纜及吊桿典型指標進行分析,包括主梁梁端縱向最大位移、主梁梁端累計位移、主梁跨中彎矩、主塔塔頂位移、主塔塔頂加速度、主塔塔根彎矩、主纜力以及吊桿力。
2.2.1對主梁的影響
主梁關注的指標以梁端縱向最大位移、梁端縱向累計位移、主梁跨中彎矩為主。梁端縱向累計位移統計了車流作用時間內,主梁端部相對于基準狀態縱向往返運動的位移絕對值之和,同時以這一時間內位移的最大絕對值作為梁端縱向最大位移。伸縮縫及支座等附屬構件壽命通常與構件在荷載作用下的變形及疲勞性能有關。研究顯示,伸縮縫、阻尼器或支座的摩擦滑動累計距離超出設計值是導致構件破壞的重要因素,而其中車流作用是梁端累計運動位移的主要來源[7]。因此,梁端縱向累計位移的減少意味著與之相關構件壽命的延長,并且梁端最大位移也決定了相關構件是否處于正常工作范圍內,是體現阻尼器對主梁縱向振動控制效果的重要指標[8]。
圖11為梁端縱向累計位移時程。可見黏滯阻尼器不同速度指數或阻尼系數對應的梁端縱向累計位移時程變化趨勢基本一致。
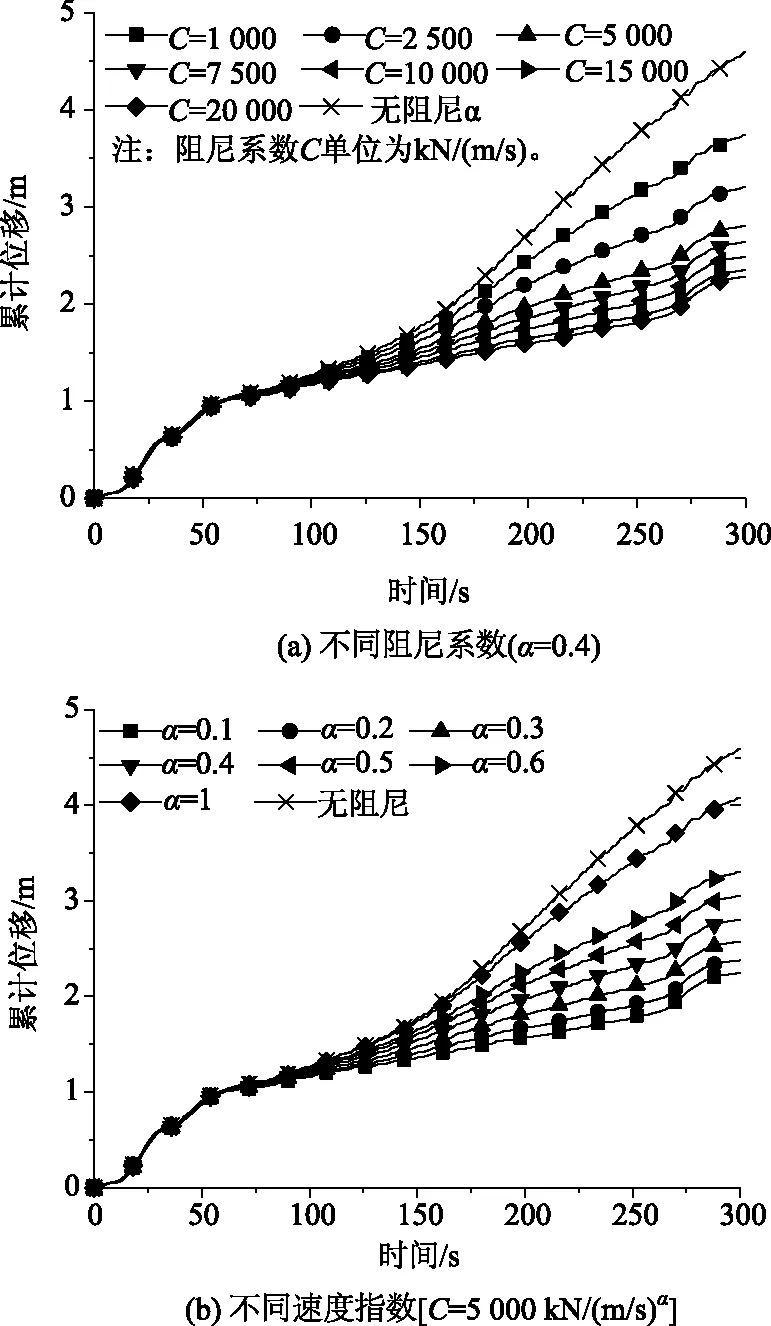
圖11 梁端縱向累計位移時程Fig.11 Time history curve of accumulated longitudinal girder displacement
圖12、圖13分別為梁端縱向累計位移和梁端縱向最大位移響應。兩種響應均隨阻尼系數增大或速度指數減小而減小,減弱率隨阻尼系數增大逐漸減小至趨于平緩。無阻尼器時車流作用下梁端累計位移為4.594 m,阻尼器作用下梁端累計位移最多減少56.36%~2.005 m。梁端縱向最大位移的變化趨勢與累計位移基本一致,梁端最大位移最多可由無阻尼器的0.611 m減小31.55%~0.418 m。
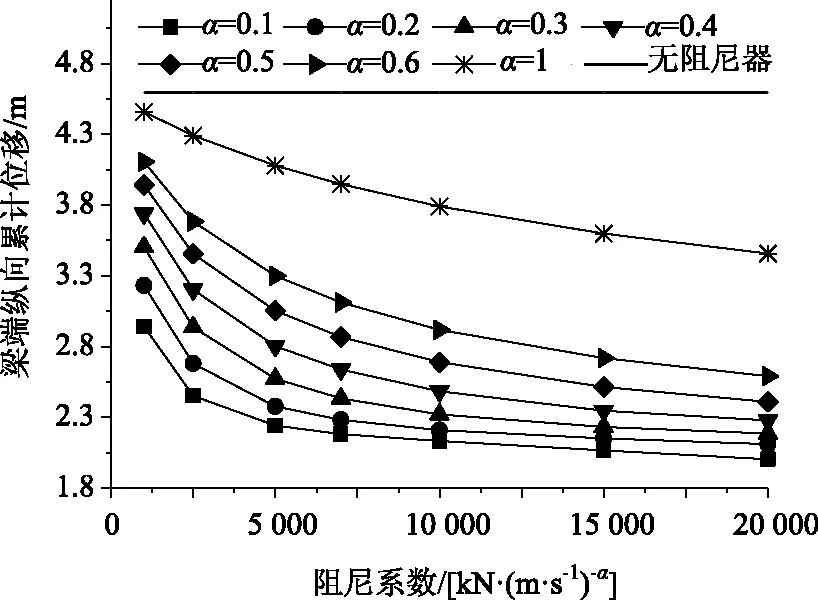
圖12 梁端縱向最大累計位移Fig.12 Maximum accumulated longitudinal girder displacement
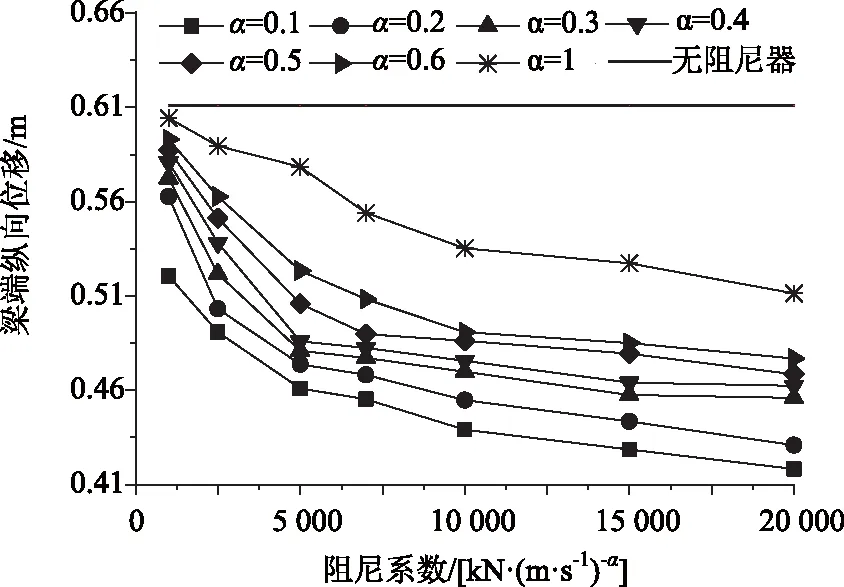
圖13 梁端縱向最大位移Fig.13 Maximum longitudinal displacement of beam end
圖14為主梁跨中彎矩的變化情況。跨中彎矩隨速度減小或阻尼系數增加而減小,速度指數小于0.3時,彎矩隨阻尼系數減弱速度較快,超過0.3則趨于平緩。在阻尼器作用下主梁跨中彎矩最多可減小6.08%。
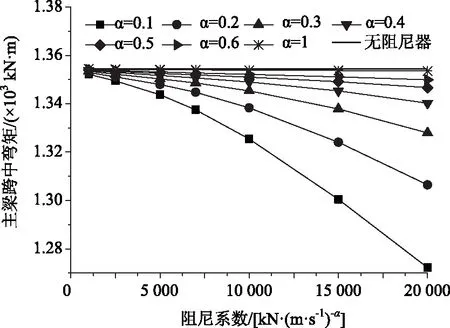
圖14 主梁跨中最大彎矩Fig.14 Maximum bending moment of girder mid-span
2.2.2對橋塔的影響
分別提取不同阻尼器參數時車流對橋塔結構的作用效應,包括塔頂位移、塔根彎矩和塔頂縱向加速度。如圖15、圖16所示,塔頂位移和塔頂縱向加速度變化趨勢總體一致,都隨著阻尼系數的增大或速度指數減小而減小。
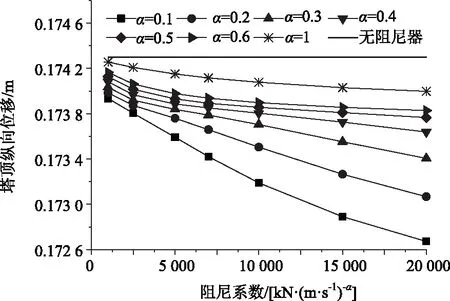
圖15 塔頂縱向最大位移Fig.15 Maximum longitudinal displacement of pylon top
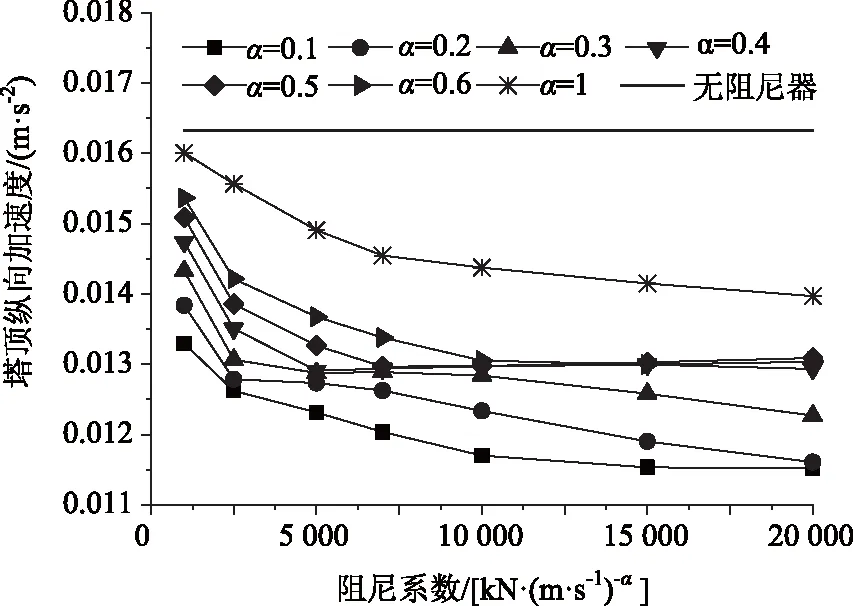
圖16 塔頂縱向加速度Fig.16 Maximum longitudinal acceleration of pylon top
塔底彎矩變化見圖17,當速度指數α<0.3時,塔底彎矩隨阻尼系數增大而增大,當速度指數0.3≤α<1時,隨阻尼系數先減小后增大,當速度指數α=1時,隨阻尼系數增大而減小。減弱率方面,塔頂位移及塔底彎矩均較小,都在1%以內。塔頂縱向加速度的減弱效果較為明顯,最大可達30.35%。
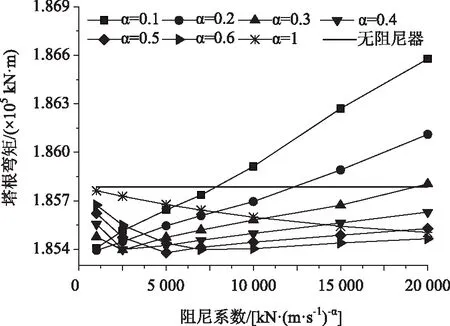
圖17 塔根最大彎矩Fig.17 Maximum bending moment of pylon root
2.2.3對主纜的影響
圖18、圖19分別給出了主纜力及吊桿力的響應。隨著阻尼系數增大,主纜力呈增大趨勢,而吊桿力呈減小趨勢。當阻尼系數不變時,主纜力極大值隨速度指數的增加而減小,吊桿力隨速度指數的增大而增大。主纜力及吊桿力受阻尼器參數變化影響較小,主纜力最大變化率僅為0.45%,吊桿力的最大變化率僅有0.88%。
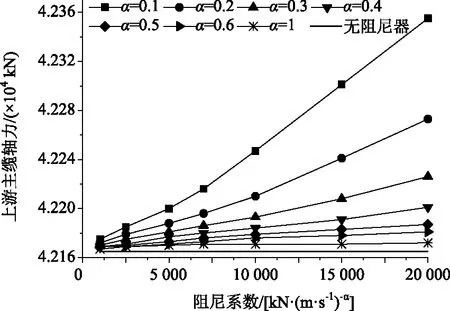
圖18 主纜力最大值Fig.18 Maximum main cable force
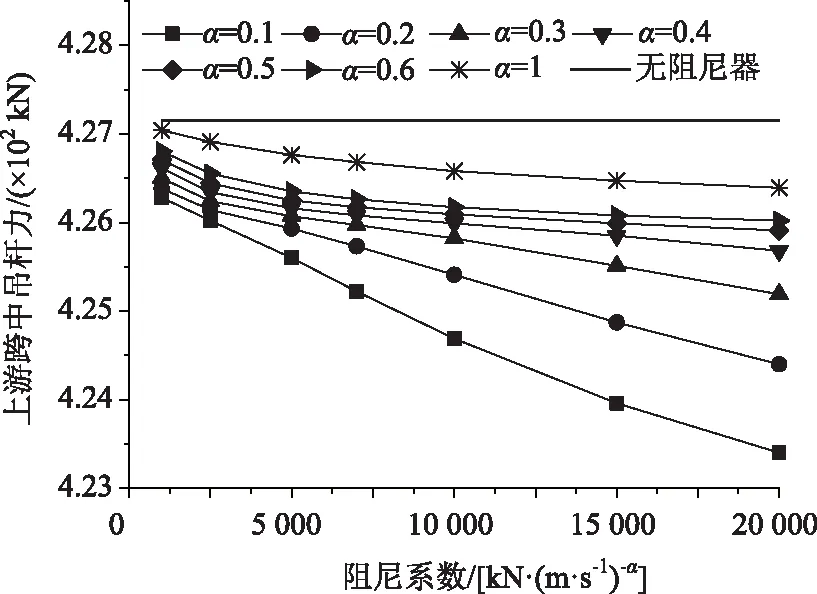
圖19 吊桿力最大值Fig.19 Maximum suspender force
3 最優阻尼器參數確定
黏滯阻尼器參數影響面廣,涉及指標較多,一般常采用試算并進行非線性規劃的方法確定最優阻尼器參數[17]。擬合函數存在誤差,各指標的權重也無明確標準,且不便于靈活調整。本研究采用變異系數法客觀確定各評價指標的權重,消除各項評價指標量綱不同帶來的影響,然后利用TOPSIS方法確定最優響應指標,根據各方案響應指標到最優響應指標的距離來尋找最優參數方案。
變異系數法作為一種客觀賦權方法,直接利用各項指標所包含的信息,通過計算得到指標的權重。指標取值差異越大的指標,也就是越難以實現的指標,其變異系數也越大[18]。TOPSIS法通過檢測評價對象與最優解及最劣解的距離來進行排序,可以客觀地對多指標情況下各方案進行綜合評價,概念清晰,可操作性強[19]。具體步驟見圖20。
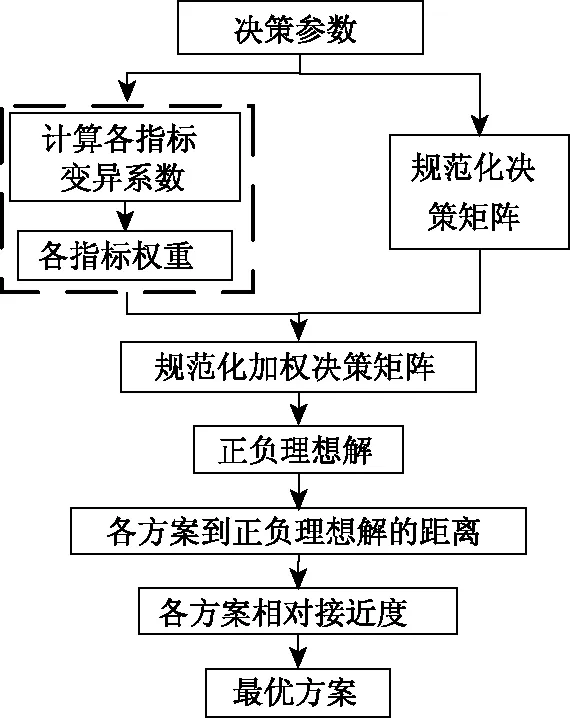
圖20 最優參數確定Fig.20 Determination of optimal parameters
變異系數法直接利用各項指標所包含的信息,對于有n個指標的賦權對象,通過式(6)計算得到指標的權重:
(6)

確定各指標權重后,即可利用TOPSIS方法進行參數評價。設決策問題有n個可行解,m個評價指標。首先根據各參數方案對應的結構評價指標的值構成決策矩陣A。
(7)
依據式(8)將決策矩陣參數規范化,根據各指標的權重構建規范化加權決策矩陣Z。

(8)
式中,fij為決策矩陣A的參數,i=1,…,n,j=1,…,m;Wj為第j項指標的權重。

(9)

表3為得到的各指標變異系數以及權重。可見,主梁的縱向最大位移、累計位移及塔頂縱向加速度變異系數及權重較大,說明阻尼器參數對3者在車流作用下的變化影響比較明顯。吊桿力、塔底彎矩及塔頂縱向位移變異系數及權重較小。得到各指標權重后,按式(7)和式(8)計算得到規范化加權矩陣,并確定理想解Z+和負理想解Z-。

表3 變異系數及權重Tab.3 Variation coefficient and weight
進一步,按式(9)計算得到各參數方案的相對接近度結果。
表4選取了所有車流下黏滯阻尼器阻尼力小于4 000 kN 中接近度排名前10位的方案。根據分析結果,速度指數對車流下結構響應的影響更明顯,速度指數小的阻尼器可在慢速運動時發揮更好的控制作用,對結構在車流作用下響應的控制效果更好。依據規范計算各參數組合下阻尼力4 000 kN時對應的設計最大運動速度[10]。結果顯示,盡管阻尼系數增大有利于減小結構在車流作用下的響應,但阻尼系數增大時對應的最大設計速度減小,不利于阻尼器在極端狀況下的工作性能。阻尼系數5 000 kN/(m/s)α,速度指數0.1時結構響應各指標最接近理想解,但此時車流作用下阻尼器最大阻尼力已達3 593 kN,接近其極限工作狀態,當阻尼系數2 500 kN/(m/s)α,速度指數0.1時,阻尼器最大阻尼力僅有1 805 kN,仍有較大工作空間,相對應的最大設計速度可達109.95 m/s,能廣泛適應各種情況。

表4 各參數相對接近度Tab.4 Relative proximity of each parameter
4 結論
針對黏滯阻尼器在大跨度懸索橋中的應用,本研究利用交通流實測數據模擬形成真實運營荷載下的高真實度車流,基于等參元方法將車輛荷載簡化為集中力荷載進行加載,研究了不同參數阻尼器對車流作用下橋梁結構響應的影響,并利用變異系數法及TOPSIS法對各參數方案進行了評價,結論如下:
(1)車流作用下,黏滯阻尼器對橋梁結構的影響不可忽略,應當作為黏滯阻尼器設計的考慮因素。黏滯阻尼器可有效降低車流作用下的梁端累計位移、梁端最大位移及塔頂縱向加速度響應,阻尼器對塔頂位移、塔根彎矩、主纜軸力及吊桿力的影響并不明顯。
(2)車流作用下,梁端縱向最大位移、累計位移,主梁跨中彎矩、塔頂縱向位移、塔頂縱向加速度及吊桿力均隨著阻尼系數增大或速度指數減小而減小。當速度指數<0.3時,塔底彎矩隨阻尼系數增大而增大,當速度指數0.3≤α<1時,塔底彎矩隨阻尼系數增大先減小后增大,當速度指數α=1時塔底彎矩隨阻尼系數增大而減小。主纜軸力隨阻尼系數增大或速度指數的減小而增大。
(3)根據分析結果,在車流作用下最優的阻尼器參數應當為C=2 500 kN/(m/s)α,α=0.1。阻尼器速度指數變化對車流作用下結構響應的影響更為明顯,速度指數越小,阻尼器的控制效果越好,可明顯提高車流作用下的振動控制效果。阻尼系數增大亦可提升控制效果,但阻尼系數過大會導致阻尼器長期處于高負荷工作狀態,不利于構件的耐久性。較小的阻尼系數對應的最大設計速度更大,能更好地應對極端工作狀況。
(4)利用變異系數法及TOPSIS法分析評價不同阻尼器參數對結構響應的影響,可以科學地確定各指標的權重,并且全面地對結構響應指標進行綜合考慮,具有適用性強、計算簡便、精確度高的特點,可以進一步應用于綜合考慮地震,風荷載及車流荷載綜合作用下的阻尼器參數確定。
