遙感艦船目標(biāo)檢測(cè)識(shí)別方法
2020-04-01 01:00:54李宗凌汪路元禹霽陽程博文郝梁
遙感信息 2020年1期
李宗凌,汪路元,禹霽陽,程博文,郝梁
(中國(guó)空間技術(shù)研究院 北京空間飛行器總體設(shè)計(jì)部,北京 100094)
0 引言
光學(xué)遙感衛(wèi)星成像數(shù)據(jù)量大,船艦?zāi)繕?biāo)的遙感成像結(jié)果一般具有稀疏特性,采用傳回地面進(jìn)行處理的方式勢(shì)必會(huì)占用大量星地通信帶寬,降低星地網(wǎng)絡(luò)通信效率[1]。星上在軌實(shí)時(shí)檢測(cè)識(shí)別技術(shù)能夠有效地解決這一問題,近年來已經(jīng)成為當(dāng)前遙感領(lǐng)域的研究熱點(diǎn)[2]。基于光學(xué)遙感圖像的在軌目標(biāo)檢測(cè)識(shí)別技術(shù)能夠有效地提高衛(wèi)星的使用效率,并及時(shí)發(fā)現(xiàn)陸地、海面顯著性目標(biāo),相比于電子偵察手段具有抗干擾能力強(qiáng)、目標(biāo)切片可譯讀性高、場(chǎng)景適應(yīng)廣泛等優(yōu)點(diǎn)。雖然光學(xué)遙感圖像目標(biāo)信息具有一定的穩(wěn)定性,但船艦?zāi)繕?biāo)容易受到場(chǎng)景變化影響,特別是隨著光照強(qiáng)度、氣候條件、海面地形等變化,船艦?zāi)繕?biāo)在復(fù)雜背景下的顯著性差異較大。單純依靠傳統(tǒng)特征檢測(cè)技術(shù)難以有效分離出目標(biāo),致使檢測(cè)正確率降低、虛警率升高,導(dǎo)致無法進(jìn)行正確的識(shí)別分類[3-4]。因此,設(shè)計(jì)適應(yīng)于不同光照、氣候條件、海面場(chǎng)景下船艦檢測(cè)識(shí)別技術(shù),成為當(dāng)前在軌信息處理的關(guān)鍵[5]。
早期的在軌實(shí)時(shí)檢測(cè)技術(shù)主要應(yīng)用于SAR圖像[6-7]。近幾年隨著光學(xué)遙感分辨率的提高,提出了大量光學(xué)遙感船艦?zāi)繕?biāo)檢測(cè)技術(shù)。程紅等[8]提出了一種顯著性特征引導(dǎo)的艦船目標(biāo)快速精細(xì)檢測(cè)方法,可準(zhǔn)確快速地定位艦船目標(biāo)和精確刻畫目標(biāo)輪廓。李曉博等[9]提出了一種靜止軌道遙感衛(wèi)星海面運(yùn)動(dòng)艦船快速檢測(cè)方法,利用多結(jié)構(gòu)多尺度濾波結(jié)合多目標(biāo)移動(dòng)式鄰域判決、計(jì)算船艦動(dòng)態(tài)信息。Gong等[10]提出了一種基于鄰域分析的海洋遙感圖像艦船檢測(cè)方法,根據(jù)鄰域窗口的均值方差積特性消除海面背景,結(jié)合船艦相關(guān)特征進(jìn)行虛警鑒別。陳韜亦等[11]提出了一種基于面向?qū)ο蟮膱D像分割和分類軟件Ecognition的技術(shù)方法來提取高分辨率遙感衛(wèi)星圖像中的海上船船目標(biāo)。徐芳等[12]提出了一種無監(jiān)督海面艦船目標(biāo)自動(dòng)檢測(cè)方法,可成功提取海面上大小不同、位置隨機(jī)分布的艦船目標(biāo),準(zhǔn)確獲取艦船目標(biāo)的數(shù)量和位置信息。黃潔等[13]提出了一種將卷積神經(jīng)網(wǎng)絡(luò)(convolution neural network,CNN)與支持向量機(jī)(support vector machine,SVM)相結(jié)合的艦船目標(biāo)檢測(cè)方法,應(yīng)用遷移學(xué)習(xí)的概念,利用大量民船樣本輔助軍艦?zāi)繕?biāo)的檢測(cè),取得較好的效果。在軌船艦檢測(cè)識(shí)別技術(shù)的基本思想是采取措施降低船艦?zāi)繕?biāo)的背景噪聲,提高有用目標(biāo)的顯著性,避免背景干擾過多影響目標(biāo)的檢測(cè)或識(shí)別。
目前的目標(biāo)檢測(cè)識(shí)別算法常采用軟件來實(shí)現(xiàn),比如C 語言、C++語言、Matlab和OpenCV等,由于計(jì)算機(jī)軟件支持各種高級(jí)語言以及友好的用戶界面互動(dòng),而且一些功能可直接用軟件里自帶的函數(shù)庫完成,所以比較方便編程,能很好地實(shí)現(xiàn)算法的驗(yàn)證和仿真,但是,這些方法在處理速度上比較慢。隨著技術(shù)的飛速發(fā)展,為了能更好地滿足圖像處理的速度和質(zhì)量,要求對(duì)圖像進(jìn)行實(shí)時(shí)處理,所以采用現(xiàn)場(chǎng)可編程門陣列(field programmable gate array,F(xiàn)PGA)等嵌入式硬件來實(shí)現(xiàn)是一個(gè)較好的選擇。由于FPGA有全并行流水處理的先天優(yōu)勢(shì),能很好地提高計(jì)算速度和處理效率[14-15]。
通過以往文獻(xiàn)可知,光學(xué)遙感船艦?zāi)繕?biāo)背景復(fù)雜干擾眾多,傳統(tǒng)的特征工程方法無法對(duì)目標(biāo)特性進(jìn)行全面準(zhǔn)確描述,檢測(cè)魯棒性差、虛警率高;基于支持向量機(jī)的目標(biāo)鑒別方法由于模型較簡(jiǎn)單、特征提取單一,導(dǎo)致目標(biāo)分類鑒別準(zhǔn)確性不高;基于深度學(xué)習(xí)的目標(biāo)檢測(cè)鑒別方法特征提取能力強(qiáng),檢測(cè)識(shí)別效果好,但對(duì)于海量遙感圖像數(shù)據(jù)來說,計(jì)算量巨大,難以直接在軌應(yīng)用。與此同時(shí),采用C++、Matlab或OpenCV等高級(jí)語言實(shí)現(xiàn)算法,雖然具有編程簡(jiǎn)單、便于快速實(shí)現(xiàn)等優(yōu)點(diǎn),但存在對(duì)處理器硬件資源要求高、效率差、能效比低等缺點(diǎn)。遙感光學(xué)成像距離遠(yuǎn),通常得到的圖像背景噪聲高、空間分辨率較低,船艦?zāi)繕?biāo)檢測(cè)過程中容易受到云朵、強(qiáng)浪、淺海地形、島嶼暗礁等因素干擾,檢測(cè)識(shí)別算法應(yīng)當(dāng)具有較強(qiáng)的適應(yīng)性,能夠適應(yīng)復(fù)雜鄰域、背景環(huán)境下的應(yīng)用。此外,星上可用計(jì)算資源及功耗有限,在設(shè)計(jì)有效在軌實(shí)時(shí)檢測(cè)識(shí)別算法的過程中必須考慮硬件資源,以滿足低功耗、小型化設(shè)計(jì)要求。另外,為方便用戶快速獲取海面信息,在軌處理系統(tǒng)應(yīng)具有良好實(shí)時(shí)性。
針對(duì)上述情況,本文提出了一種基于深度學(xué)習(xí)的遙感艦船目標(biāo)檢測(cè)識(shí)別方法。該方法采用形態(tài)學(xué)運(yùn)算+深度學(xué)習(xí)的方法,基于視覺增強(qiáng)技術(shù)快速篩選疑似目標(biāo),大幅降低后續(xù)處理的數(shù)據(jù)量;采用深度學(xué)習(xí)網(wǎng)絡(luò),實(shí)現(xiàn)對(duì)上述步驟快速篩選出的疑似目標(biāo)切片進(jìn)行細(xì)分類,大幅降低虛警,提取目標(biāo)有效信息。深度學(xué)習(xí)網(wǎng)絡(luò)采用圖形處理單元(graphic processing unit,GPU)并行化計(jì)算提高訓(xùn)練效率;采用FPGA實(shí)現(xiàn)目標(biāo)檢測(cè)和深度學(xué)習(xí)網(wǎng)絡(luò)推理模型,充分發(fā)揮FPGA全并行流水處理的特點(diǎn),提高目標(biāo)檢測(cè)、識(shí)別分類的實(shí)時(shí)性,降低系統(tǒng)功耗、提升系統(tǒng)能效比。經(jīng)過實(shí)驗(yàn),本設(shè)計(jì)針對(duì)海況地形復(fù)雜、背景顯著性差的遙感艦船目標(biāo),檢測(cè)識(shí)別準(zhǔn)確性和實(shí)時(shí)性,性能優(yōu)異。
1 面向光學(xué)遙感衛(wèi)星應(yīng)用的船艦?zāi)繕?biāo)實(shí)時(shí)檢測(cè)算法
1.1 目標(biāo)檢測(cè)算法
經(jīng)過研究,提出了一種面向光學(xué)遙感衛(wèi)星應(yīng)用的船艦?zāi)繕?biāo)實(shí)時(shí)檢測(cè)算法。通過對(duì)待檢區(qū)域統(tǒng)計(jì)特性分析,區(qū)分出復(fù)雜環(huán)境下疑似船艦?zāi)繕?biāo)區(qū)域,從而快速得到檢測(cè)結(jié)果。
可見光遙感圖像船艦?zāi)繕?biāo)檢測(cè)算法主要流程如圖1所示,分為3個(gè)部分。①背景噪聲抑制。對(duì)原始圖像采用高斯濾波、中值濾波去除周期性和隨機(jī)噪聲,并經(jīng)過形態(tài)學(xué)開閉運(yùn)算消除由噪聲引起的目標(biāo)內(nèi)部孔洞,連接臨近目標(biāo)和平滑邊界,實(shí)現(xiàn)目標(biāo)增強(qiáng)。②疑似目標(biāo)篩選分割。首先通過對(duì)圖像進(jìn)行切片,比對(duì)當(dāng)前檢測(cè)區(qū)域與鄰域直方圖方差特性,區(qū)分出純海域、陸地、疑似目標(biāo)3種類別,然后對(duì)疑似目標(biāo)區(qū)域進(jìn)行自適應(yīng)迭代分割,采用最大類間方差法求取二值分割閥值,得到二值圖像后進(jìn)行連通域標(biāo)注,得到疑似目標(biāo)標(biāo)注結(jié)果。③基于質(zhì)心快速求取疑似船艦的位置信息,便于后續(xù)基于深度學(xué)習(xí)的目標(biāo)識(shí)別算法對(duì)目標(biāo)切片進(jìn)行精細(xì)分類和鑒別。光學(xué)遙感圖像目標(biāo)檢測(cè)結(jié)果如圖2所示。

圖1 可見光遙感圖像船艦?zāi)繕?biāo)實(shí)時(shí)檢測(cè)算法流程

圖2 光學(xué)遙感圖像目標(biāo)檢測(cè)結(jié)果
該方法兼顧了算法的有效性及工程實(shí)現(xiàn)的可行性,在嵌入式電路中采用本方法對(duì)不同復(fù)雜鄰域、背景下船艦?zāi)繕?biāo)進(jìn)行檢測(cè)試驗(yàn),能夠有效地檢測(cè)出船艦?zāi)繕?biāo)。
1.2 目標(biāo)檢測(cè)算法實(shí)時(shí)實(shí)現(xiàn)
1)算法分解及模塊劃分。目標(biāo)檢測(cè)算法是由7個(gè)流水卷積核、自適應(yīng)分割、局部統(tǒng)計(jì)分類組成的深度計(jì)算結(jié)構(gòu)。單個(gè)卷積核單元是一種基本的二維濾波結(jié)構(gòu),卷積核層內(nèi)部包括串聯(lián)層和并聯(lián)層,串聯(lián)層層與層之間相互連接,并聯(lián)層層內(nèi)連接主要包括模加減操作。卷積層輸出的結(jié)果進(jìn)入自適應(yīng)分割網(wǎng)絡(luò),通過自適應(yīng)迭代調(diào)整輸出顯著性前景目標(biāo)。局部統(tǒng)計(jì)分類器對(duì)目標(biāo)上下文進(jìn)行判決,最終判定結(jié)果是否為船艦,并輸出目標(biāo)坐標(biāo)及面積大小。
目標(biāo)檢測(cè)算法的優(yōu)勢(shì)在于模型具有層次性,參數(shù)比較多并且能夠并行流水執(zhí)行,因而可以更好地適用于并行流水計(jì)算,特別是在卷積核計(jì)算輸出之后進(jìn)行了分割降維,有效降低了傳統(tǒng)計(jì)算過程中90%以上的計(jì)算量,極大地減少了在軌應(yīng)用對(duì)硬件資源的依賴。
采用可編程邏輯電路設(shè)計(jì)語言Verilog實(shí)現(xiàn)了該目標(biāo)檢測(cè)算法。采用全并行流水、模塊化、參數(shù)化、硬件資源復(fù)用等設(shè)計(jì)思想,有效提升了算法實(shí)現(xiàn)的效率和可移植性。通過頂層分解,算法實(shí)現(xiàn)的模塊和流程如圖3至圖6所示。

圖3 目標(biāo)檢測(cè)算法功能實(shí)現(xiàn)框圖

圖4 圖像預(yù)處理功能實(shí)現(xiàn)框圖

圖5 圖像分割流程圖

圖6 坐標(biāo)求取流程圖
2)硬件資源占用情況。上述所有模塊均按處理圖像尺寸為1 024像素×1 024像素設(shè)計(jì)。處理過程需占用大量存儲(chǔ)資源。由于FPGA等可編程邏輯器件存儲(chǔ)資源有限,因此,需使用外部存儲(chǔ)資源DDR3完成整個(gè)處理流程。圖像尺寸為1 024像素×1 024像素,完成上述整個(gè)處理流程需使用24 Mbit外部存儲(chǔ)資源。
除此之外,其他硬件開銷見表1。表1中FPGA以Xilinx公司K7-325T為例。

表1 目標(biāo)檢測(cè)算法在K7-325T上實(shí)現(xiàn)資源占用情況
3)處理性能分析。上述處理過程中,圖像分割、連通域標(biāo)注、坐標(biāo)求取3部分不能實(shí)現(xiàn)全并行流水處理,需要先將處理過程的中間結(jié)果全部緩存,等到處理完成后,再讀出緩存數(shù)據(jù)進(jìn)行再處理。其中,圖像分割處理時(shí)間僅與圖像尺寸相關(guān),處理時(shí)間是圖像數(shù)據(jù)讀取的時(shí)間。連通域標(biāo)注時(shí)間與連通域的個(gè)數(shù)、形狀以及圖像尺寸均有關(guān),為系統(tǒng)延時(shí)產(chǎn)生的主要因素。坐標(biāo)求取時(shí)間與目標(biāo)個(gè)數(shù)成正比,但是,每個(gè)坐標(biāo)的求取耗時(shí)較少,對(duì)系統(tǒng)處理延時(shí)影響較小。
在FPGA平臺(tái)上實(shí)現(xiàn)整個(gè)處理過程,主處理時(shí)鐘為200 MHz。輸入數(shù)據(jù)速率200 MByte/s,連通域個(gè)數(shù)為16,原始圖像尺寸為8 192像素×8 192像素,將其分辨率降采樣至1 024像素×1 024像素,整個(gè)處理過程消耗時(shí)間最大約為1 s。
1.3 目標(biāo)檢測(cè)算法實(shí)現(xiàn)效果
如圖7所示,在Xilinx公司開發(fā)板上完成了實(shí)時(shí)處理工程實(shí)現(xiàn),結(jié)合該板卡外圍千兆以太網(wǎng)總線、DDR3存儲(chǔ)及視頻圖形陣列(video graphic array,VGA)顯示接口,形成可演示實(shí)時(shí)信息處理系統(tǒng)。

圖7 船艦?zāi)繕?biāo)檢測(cè)功能驗(yàn)證框圖
采用高分2號(hào)遙感衛(wèi)星圖像,驗(yàn)證了目標(biāo)檢測(cè)算法的有效性和實(shí)時(shí)實(shí)現(xiàn)的可行性,為后續(xù)在軌應(yīng)用奠定理論和工程基礎(chǔ)。
圖8和圖9為基于Xilinx官方開發(fā)板KC-705搭建的驗(yàn)證系統(tǒng)及相應(yīng)處理結(jié)果。

圖8 目標(biāo)檢測(cè)效果圖

圖9 目標(biāo)檢測(cè)算法原理驗(yàn)證系統(tǒng)工作圖
2 基于光學(xué)遙感圖像的艦船目標(biāo)識(shí)別方法
2.1 目標(biāo)識(shí)別算法
本文從艦船疑似目標(biāo)的圖像切片作為CNN分類器的樣本數(shù)據(jù),人工標(biāo)定目標(biāo)切片作為分類器訓(xùn)練輸入樣本。其中CNN模型選用VGG-16模型。VGG-16網(wǎng)絡(luò)是一種典型深度CNN模型,由Simonyan和Zisserman在2014年首次提出,在ImageNet2014分類大賽上Top-5錯(cuò)誤率僅為7.4%,僅次于GoogleNet的6.7%,是一種非常強(qiáng)大的深度卷積神經(jīng)網(wǎng)絡(luò),能提取圖像中更深層特征,分類能力突出。
標(biāo)準(zhǔn)的VGG-16網(wǎng)絡(luò)結(jié)構(gòu)如圖10所示,包含13個(gè)卷積層和3個(gè)全連接層,使用不斷增加的3×3卷積層,并通過2×2 最大池化來減小運(yùn)算規(guī)格,然后是2個(gè)4 096節(jié)點(diǎn)和1個(gè)1 000節(jié)點(diǎn)的全連接層,最后是一個(gè)Softmax分類器,能夠?qū)崿F(xiàn)1 000類目標(biāo)分類。
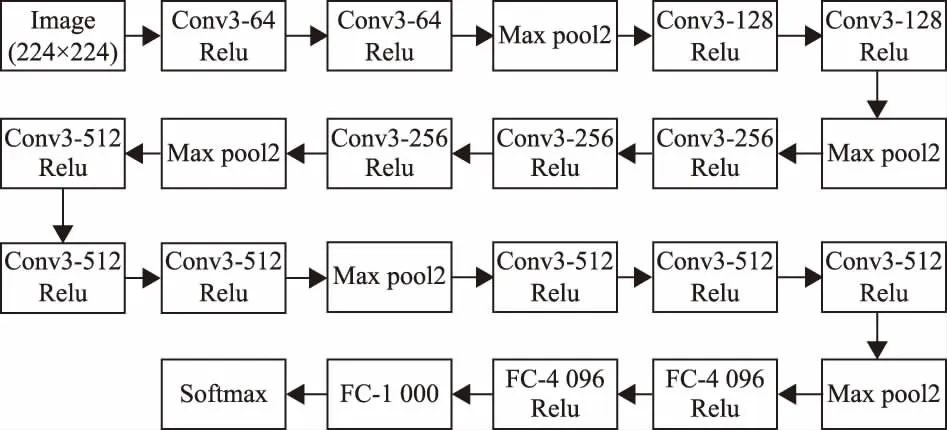
圖10 標(biāo)準(zhǔn)VGG-16模型結(jié)構(gòu)圖
1)VGG16模型訓(xùn)練。艦船目標(biāo)鑒別的過程分為訓(xùn)練與預(yù)測(cè)2個(gè)過程。首先根據(jù)人工標(biāo)定的目標(biāo)圖像切片作為CNN分類器的學(xué)習(xí)輸入,經(jīng)過訓(xùn)練后得到對(duì)應(yīng)的分類器,然后根據(jù)得到的分類器對(duì)待分類目標(biāo)切片進(jìn)行預(yù)測(cè),實(shí)現(xiàn)目標(biāo)鑒別,鑒別過程如圖11所示。

圖11 基于深度學(xué)習(xí)的目標(biāo)切片鑒別流程
CNN較傳統(tǒng)方法可以學(xué)習(xí)到更高效的高層圖像特征,但是訓(xùn)練一個(gè)識(shí)別率高、泛化能力強(qiáng)的CNN模型,往往需要大量有標(biāo)簽樣本。目前光學(xué)遙感圖像數(shù)據(jù)集相對(duì)有限,而多數(shù)深度學(xué)習(xí)模型是面向自然場(chǎng)景圖像識(shí)別任務(wù),研究充分,數(shù)據(jù)量大,本項(xiàng)目通過采用遷移學(xué)習(xí)的方法,將在大樣本數(shù)據(jù)集ImageNet上預(yù)訓(xùn)練好的模型應(yīng)用在其他不同空間尺度不同傳感器的少樣本應(yīng)用中,是提升艦船樣本應(yīng)用效率,提升系統(tǒng)擴(kuò)展能力的關(guān)鍵技術(shù)。
本文設(shè)計(jì)的分類器在標(biāo)準(zhǔn)VGG-16模型基礎(chǔ)上修改,根據(jù)需要,設(shè)計(jì)成可完成4類目標(biāo)的分類鑒別,分別為船、島嶼、云及海堤/人工建筑。將4類目標(biāo)共計(jì)8 128個(gè)目標(biāo)切片進(jìn)行人工標(biāo)定,作為數(shù)據(jù)集,4類目標(biāo)切片圖取自高分2號(hào)光學(xué)遙感衛(wèi)星圖,切片樣本如圖12所示。數(shù)據(jù)集中船目標(biāo)切片包含2 820個(gè),云目標(biāo)切片包含1 734,島嶼目標(biāo)切片為1 593個(gè),海堤/人工建筑目標(biāo)切片包含1 981個(gè),隨機(jī)選取其中7 000個(gè)樣本作為訓(xùn)練集,約占數(shù)據(jù)集的86.12%,在ImageNet數(shù)據(jù)集模型參數(shù)基礎(chǔ)上完成訓(xùn)練,得到新的模型參數(shù),剩余1 128個(gè)目標(biāo)切片作為測(cè)試集。

圖12 目標(biāo)樣本切片(從上至下分別為云、島、海堤/人工建筑、船)
2)算法分解及模塊劃分。目標(biāo)識(shí)別算法采用深度CNN網(wǎng)絡(luò)VGG-16模型,該模型運(yùn)算規(guī)律性強(qiáng),便于利用FPGA實(shí)現(xiàn)并行加速。如圖13所示,VGG-16模型加速器按功能分為控制層、卷積層和分類層。整體控制由控制層完成,主要包含數(shù)據(jù)流控制模塊、通信控制模塊、存儲(chǔ)控制模塊、特征圖運(yùn)算控制模塊;卷積、池化以及激活運(yùn)算由卷積層完成,主要包含卷積模塊、最大池化模塊以及Relu激活;全連接運(yùn)算以及Softmax分類由輸出層完成,主要包含F(xiàn)C-X和Softmax模塊。加速器所有模塊設(shè)計(jì)均采用全流水并行設(shè)計(jì)思想,通過數(shù)據(jù)流驅(qū)動(dòng),便于后續(xù)模塊復(fù)用和構(gòu)建參數(shù)化的加速架構(gòu)。

圖13 VGG-16模型加速器功能分解圖
3)硬件資源占用。將加速器布置在Virtex7-690T FPGA中,硬件資源占用情況如表2所示。當(dāng)前卷積神經(jīng)網(wǎng)絡(luò)主要實(shí)現(xiàn)方法技術(shù)指標(biāo)對(duì)比情況如表3所示。同樣的輸入圖像數(shù)據(jù),在相同處理效果的基礎(chǔ)上,該加速器能效比為CPU-I7-6700的260倍以上,相對(duì)于GPU-GTX1050能效比為28倍以上。并和當(dāng)前業(yè)內(nèi)采用FPGA實(shí)現(xiàn)CNN的加速方案進(jìn)行了對(duì)比,相同條件下,均有不小優(yōu)勢(shì)。考慮星上在軌應(yīng)用,該加速器可布置在V5-130T FPGA上。

表2 目標(biāo)識(shí)別算法在V7-690T上實(shí)現(xiàn)資源占用情況

表3 主要技術(shù)指標(biāo)對(duì)比
2.2 目標(biāo)識(shí)別算法實(shí)現(xiàn)效果
將VGG-16網(wǎng)絡(luò)布置在Net-FPGA開發(fā)板的Virtex7-690T FPGA上,VGG-16模型加速器基本架構(gòu)如圖14所示。模型參數(shù)為基于船、島嶼、云及海堤/人工建筑4類目標(biāo)樣本的訓(xùn)練參數(shù)。隨機(jī)選擇驗(yàn)證集圖像切片進(jìn)行分類結(jié)果驗(yàn)證,該加速器對(duì)應(yīng)驗(yàn)證分類結(jié)果如圖15至圖18所示。由圖可知,該模型參數(shù)對(duì)4類目標(biāo)分類效果良好,基于FPGA-NET開發(fā)板實(shí)現(xiàn)的加速器功能正確,可完成目標(biāo)分類識(shí)別功能。另外,由于FPGA量化處理的影響,加上4類目標(biāo)特征明顯,模型訓(xùn)練樣本庫數(shù)據(jù)不多,模型參數(shù)出現(xiàn)了過擬合。因此,所得到的目標(biāo)置信度很高,達(dá)到了1。這個(gè)問題隨著后續(xù)樣本庫的豐富,模型訓(xùn)練參數(shù)會(huì)越來越完善,分類會(huì)更細(xì)致可靠。

圖14 VGG-16模型加速器架構(gòu)
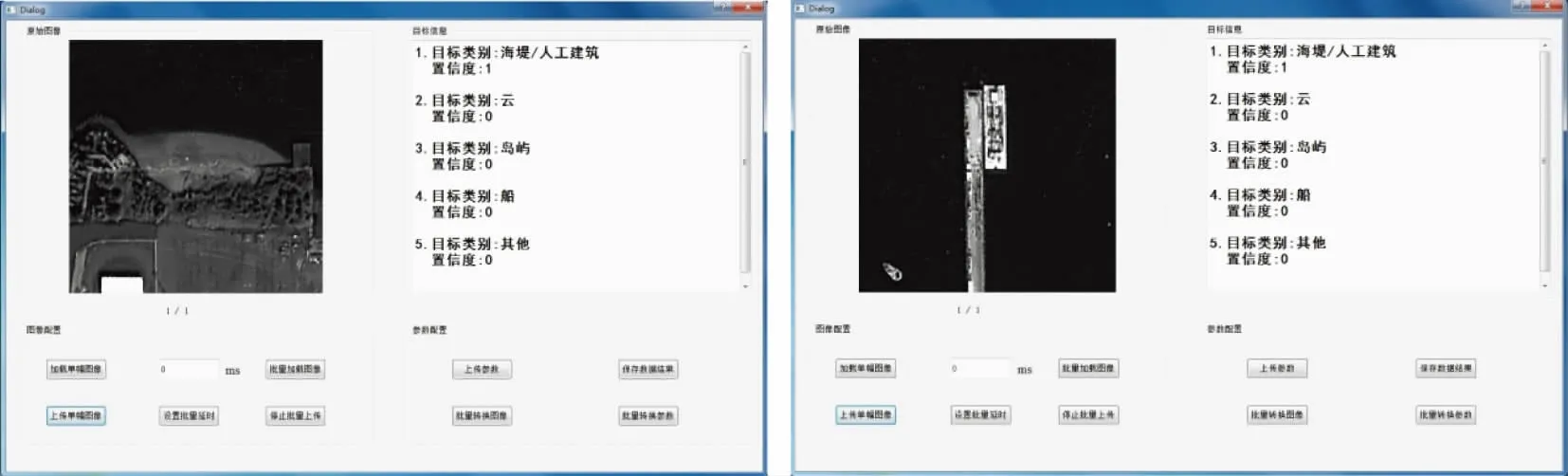
圖15 處理結(jié)果1(海堤/人工建筑)

圖16 處理結(jié)果2(島)

圖17 處理結(jié)果3(云)

圖18 處理結(jié)果4(船)
3 基于光學(xué)遙感圖像的艦船目標(biāo)檢測(cè)識(shí)別系統(tǒng)構(gòu)建與驗(yàn)證
3.1 驗(yàn)證系統(tǒng)構(gòu)建
將本文的目標(biāo)檢測(cè)、目標(biāo)識(shí)別功能模塊以及主控臺(tái)(PC機(jī))構(gòu)建一個(gè)驗(yàn)證系統(tǒng),框圖如圖19所示。其中,目標(biāo)檢測(cè)單元通過傳統(tǒng)的形態(tài)學(xué)匹配方法從大幅寬遙感圖像中快速獲取疑似艦船目標(biāo),生成疑似目標(biāo)切片,輸出給基于深度學(xué)習(xí)的目標(biāo)分類單元,完成目標(biāo)鑒定和精細(xì)分類,從而有效提升系統(tǒng)處理效率和正確率。
系統(tǒng)工作流程如下:首先,主控臺(tái)控制軟件通過PCIe總線將模型參數(shù)發(fā)送給目標(biāo)識(shí)別板FPGA(Virtex7-690T);其次,通過千兆以太網(wǎng)將圖像數(shù)據(jù)發(fā)送給檢測(cè)板FPGA(kirtex7-325T),檢測(cè)板完成處理后,將檢測(cè)結(jié)果通過千兆以太網(wǎng)發(fā)送給主控臺(tái);再次,主控臺(tái)控制軟件根據(jù)檢測(cè)結(jié)果的目標(biāo)位置從原始圖像中提取目標(biāo)切片,并將切片數(shù)據(jù)通過PCIe總線發(fā)送至目標(biāo)識(shí)別板;然后,目標(biāo)識(shí)別通過CNN模型網(wǎng)絡(luò)處理切片圖像,將得到的分類結(jié)果通過PCIe總線發(fā)送給主控臺(tái);最后,主控臺(tái)將目標(biāo)切片及相應(yīng)分類結(jié)果顯示在控制軟件,直到所有的目標(biāo)切片完成分類識(shí)別。

圖19 驗(yàn)證系統(tǒng)框圖
3.2 系統(tǒng)驗(yàn)證
驗(yàn)證系統(tǒng)實(shí)物組成由圖20所示,具體處理效果如圖21所示。輸入原始圖像尺寸為8 192像素×8 192像素,圖像分辨率為0.8 m,目標(biāo)切片尺寸為224像素×224像素。每個(gè)目標(biāo)的檢測(cè)時(shí)間不超過100 ms;每個(gè)目標(biāo)的識(shí)別時(shí)間不超過1 s。系統(tǒng)具有良好的實(shí)時(shí)性。

圖20 驗(yàn)證系統(tǒng)實(shí)物組成

圖21 系統(tǒng)處理效果圖
3.3 性能分析
目標(biāo)檢測(cè)識(shí)別后,3.2節(jié)已對(duì)實(shí)時(shí)性指標(biāo)作了說明。本節(jié)使用檢測(cè)正確率和虛警率對(duì)本文艦船目標(biāo)檢測(cè)識(shí)別算法準(zhǔn)確性能進(jìn)行定量評(píng)價(jià)。
檢測(cè)正確率:
(1)
虛警率:
(2)
式中:Nt是圖像中正確目標(biāo)的總個(gè)數(shù);Ntt是正確檢測(cè)的目標(biāo)個(gè)數(shù);Nfa為虛警個(gè)數(shù)。為客觀評(píng)價(jià)本文方法的有效性,將其與2種目標(biāo)檢測(cè)方法(文獻(xiàn)[5]和文獻(xiàn)[13])的檢測(cè)結(jié)果進(jìn)行對(duì)比。實(shí)現(xiàn)數(shù)據(jù)如表4所示。由表4可知,本文方法正確率和虛警率指標(biāo)均優(yōu)于近幾年業(yè)內(nèi)方法。

表4 不同方法的檢測(cè)結(jié)果
4 結(jié)束語
本文提出了一種基于深度學(xué)習(xí)的遙感艦船目標(biāo)檢測(cè)識(shí)別方法,可用于星載平臺(tái)的船艦?zāi)繕?biāo)在軌實(shí)時(shí)檢測(cè)。該方法通過對(duì)遙感圖像進(jìn)行背景噪聲抑制,增強(qiáng)了船艦?zāi)繕?biāo)相對(duì)于背景的灰度對(duì)比度,然后采用待檢區(qū)域-鄰域直方圖方差比對(duì)的方法結(jié)合分割標(biāo)注結(jié)果區(qū)分出疑似目標(biāo)區(qū)域,快速提取出疑似船艦?zāi)繕?biāo),保證目標(biāo)檢測(cè)率和速率。最后,通過采用深度學(xué)習(xí)網(wǎng)絡(luò)模型VGG16,對(duì)上述傳統(tǒng)方法獲得的檢測(cè)結(jié)果做進(jìn)一步的分類識(shí)別,在背景復(fù)雜、虛警率高的情況下,能夠有效判讀出艦船目標(biāo)以及其他背景干擾項(xiàng),降低虛警率。
通過2塊Xilinx公司官方開發(fā)板,搭建了一個(gè)實(shí)時(shí)處理驗(yàn)證系統(tǒng),使用高分2號(hào)光學(xué)遙感衛(wèi)星圖像進(jìn)行測(cè)試,可以看到本方法能夠準(zhǔn)確地從云、島嶼、人工建筑等復(fù)雜背景干擾中識(shí)別出圖像中的船艦?zāi)繕?biāo)。本方法具有易于在星上嵌入式硬件實(shí)現(xiàn)的優(yōu)點(diǎn),經(jīng)過實(shí)際驗(yàn)證,能夠在2片Virtex5-130T FPGA上實(shí)現(xiàn),處理8 192像素×8 192像素8位灰度遙感圖像,目標(biāo)數(shù)不超過16的情況下,單幅檢測(cè)時(shí)間小于1 s,識(shí)別時(shí)間小于16 s,滿足低功耗、小型化光學(xué)遙感圖像在軌船艦?zāi)繕?biāo)實(shí)時(shí)檢測(cè)處理需求。
在取得以上成果的同時(shí),本研究也存在許多不足,需要在將來的研究中做出改進(jìn)。首先,由于遙感數(shù)據(jù)分辨率較低,目標(biāo)特征表現(xiàn)相對(duì)高清圖像較弱,再加上樣本數(shù)不夠豐富,本文訓(xùn)練的模型存在過擬合的風(fēng)險(xiǎn),因此后續(xù)需進(jìn)一步研究樣本數(shù)量與質(zhì)量對(duì)數(shù)據(jù)模型訓(xùn)練效果的影響,使模型在分類種類、精度和魯棒性方面有更好的提升。第二,在實(shí)驗(yàn)中僅測(cè)試了一種CNN模型,不同模型對(duì)性能的影響缺乏實(shí)際效果的說明。第三,網(wǎng)絡(luò)剪枝可以有效降低參數(shù)量,稀疏網(wǎng)絡(luò),降低處理計(jì)算量,本文在此方面沒有做研究,在后續(xù)運(yùn)算效率上還有很大提升空間。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
數(shù)學(xué)小靈通(1-2年級(jí))(2021年4期)2021-06-09 06:25:56
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年4期)2019-05-20 10:06:32
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2018年6期)2018-06-26 08:36:06
初中生世界·七年級(jí)(2017年9期)2017-10-13 22:27:46
