河津騰暉煤業智能化降塵技術實踐
2020-04-07 06:32:38李國強
山東煤炭科技 2020年3期
李國強
(霍州煤電河津騰暉煤業有限責任公司,山西 運城 043300)
煤塵的大量積聚容易引發塵爆災害,煤塵落在采煤裝備的關鍵部位會加速設備磨損,煤塵的大量擴散會擋視線引發誤操作,還會導致長期接觸煤塵的工人患職業病(塵肺病)。隨著河津騰暉煤業智能化開采的推進,智能化開采給粉塵防治工作帶來以下問題:遮擋視線影響開采空間的判斷和定位;造成設備磨損;降低設備工作性能和智能傳感探測精度;煤塵的積聚給智能化開采工作面帶來了極大的安全隱患。因此必須針對智能化工作面開采的需求,對煤塵治理進行頂層設計,努力實現防塵降塵的智能化,進一步提升采煤工作面智能化開采水平。
1 降塵技術智能化控制關鍵技術分析
1.1 智能傳感技術
傳感器的創新或改進往往能夠引起相關智能控制的變革。智能化降塵系統的應用需要有能提升其智能感知能力的傳感裝置,包括高可靠性和靈敏度的粉塵傳感器、低功耗動作感知傳感器、無線定位傳感器和煤流監測傳感器等。一方面需要提升現有傳感器的感知能力,另一方面要研發一批新的智能傳感器,其主要特點包括無線、抗干擾、低功耗、高可靠性、自定位和小型化,最重要的是能支持物聯網接入技術。在河津騰暉煤業智能化降塵系統中,應用了天地科技研發的一種能夠支持物聯網接入技術的自定位無線壓力開關,可用來感應液壓類開關操作,并將操作位置和操作點發送出去。傳感器還支待非接觸調試和檢修技術,方便設備調試及維護檢穩。
1.2 互聯網+物聯網的井下信息傳輸技術
互聯網+物聯網是整個智能化開采的中樞,應用于智能化降塵系統,在信息傳輸的頂層設計中設計了智能化降塵系統的信息傳輸網絡,包括數據接口、傳輸協議、通信方式和相互間的數據交換和動作協調等。充分發揮網絡優勢,從數據流高效傳輸和利用的角度規劃智能化降塵控制系統。
1.3 機器學習與智能化控制軟件
從煤礦地質條件和開采條件的情況出發,基于降塵要求和技術細節的差別,加上井下實地測試的困難和對生產的影響,該礦智能化除塵系統需要能夠實現自動檢測和智能決策控制,并能夠進行清晰明了的遠程顯示和簡單可靠的遠程干預。因此,智能化除塵系統要引入機器學習技術,要求現有智能化降塵系統不僅能夠實現智能控制,還要能夠進行現場關鍵要素的收集、智能控制經驗的自積累、降塵效果的評價等,并能進行數據的關聯學習,進而實現真正智能控制。該礦采用了“綜采工作面智能噴霧控制軟件”,通過該軟件可以簡單地收集工作面支架數、采煤機運行參數、支架操作狀態參數等,并能實現跟機自動噴霧、降架、移架噴霧、采煤機間隔多架支架進行噴霧、多架同時噴霧,延時噴霧等多種功能。該軟件還可以與采煤機等綜合控制裝置進行通信,實現聯動智能控制。
2 智能化降塵系統在降塵噴霧點優化布置方案
智能化降塵系統完成設計后,在河津騰暉煤業公司的1514、1524、1517、1523四個工作面進行工業性試驗。其降塵噴霧點優化布置方案設計如下。
從河津騰暉煤業公司井下塵源情況可知,綜掘工作面和綜采工作面是最大的產塵點,尤以綜采(綜放)工作面產塵量最大,治理最困難。在眾多的除塵方法中,噴霧降塵以其布置簡單、易于實現智能控制、除塵效果好而應用最為廣泛。傳統除塵多為針對粉塵擴散過程進行的治理,而要達到更好的效果,并將粉塵的危害降至最低,需變“過程除塵”為“原位除塵”,即以煤塵的最少產生和擴散為治理目標而不僅僅是將煤塵降下來。通過長期對該煤礦井下粉塵觀測和治理實踐,制定了以下優化布置方案,如圖1所示。
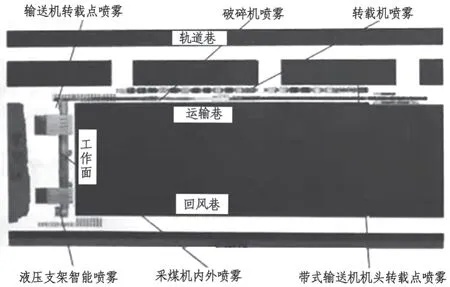
圖1 綜采工作面總體降塵方案
2.1 液壓支架智能噴霧
降架、移架過程主要通過布置在液壓支架兩側的扇形噴霧進行除塵。在液壓支架每側布置3~4個扇形噴頭向頂板及采空區方向噴霧,一是對頂板煤層進行預混,二是阻止煤上沿液壓支架縫隙飄散,從而達到除塵的目的。
由于采煤機是運動的,因此要求噴霧系統具有跟機噴霧的功能。同時因為煤塵會飄散,擴散范圍較大,因此噴霧的位置、噴霧持續的時間等需要優化設置。通過大量的研究和優化設計,單支架的跟機噴霧點設置如圖2所示。噴霧點共設置4個噴頭,前部兩個錐形噴頭,后部兩個扇形噴頭。錐形噴頭主要向煤壁和采煤機噴霧,主要作用是預濕煤壁和阻止采煤機割煤產生煤塵的擴散。扇形噴頭會沿割煤方向形成兩道水霧簾,主要作用是阻止細小煤塵向液壓支架行人空間的擴散。
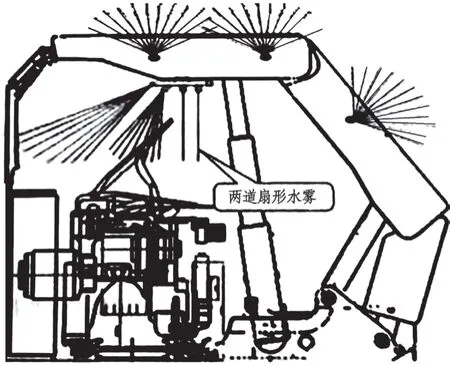
圖2 液壓支架智能噴霧單支架布置方案
2.2 采煤機內外噴霧
采煤機內外噴霧如圖3所示。首先在采煤機截割滾筒上布置內噴霧,它既起到預濕煤壁的作用,又對細小煤塵具有初步的沉降作用,還減緩了中粒徑煤塵的動能,有利于后續的除塵作業。其次設置采煤機外噴霧,外噴霧距離截割滾筒的距離要適當,太近會因中粒徑煤塵動能仍然較大而難以達到很好的捕塵效果,太遠則容易造成煤塵的擴散,且霧粒的速度又會降低,同樣達不到好的降塵效果。本方案中設置了左右搖臂可調外噴霧,增強了噴霧系統對現場降塵的適應性,能起到更好的降塵作用。
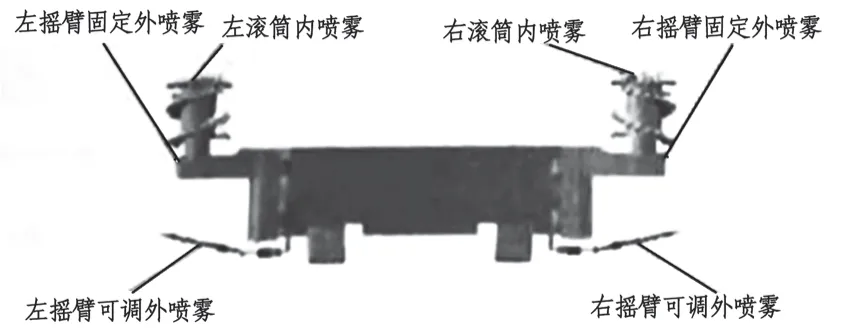
圖3 采煤機內外噴霧
2.3 轉載、破碎點噴霧
在轉載機入口、破碎機前后、轉載機橋部、轉載機卸載點各安裝一組噴霧(每組錐形噴嘴,直徑1.2mm,流量3~5L/min),智能檢測設備的啟停以及煤流狀態,自動噴霧。如圖4所示。
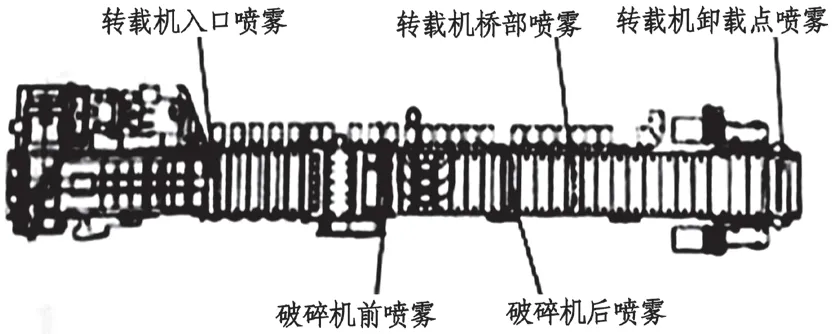
圖4 轉載、破碎點噴霧示意圖
2.4 工作面巷道噴霧
運輸巷主要以風流帶入的粉塵為主,多為粒徑較小的細小煤塵,飄散距離遠,濃度不高但難以徹底清除。根據其在運輸巷的分布和沉降規律,運輸巷安裝3道自動風流凈化水幕和2道捕塵簾(每道5個扇形陶瓷噴嘴),第1道距工作面30m,第2道在帶式輸送機機頭以里50m處,第3道在全風壓匯合點以里50m處,捕捉風流中粉塵。如圖5所示。
3 應用效果分析
從智能噴霧降塵系統在河津騰暉煤業1514、1524、1517、1523四個工作面的應用效果來看,該系統整體運行穩定,能適應工作面智能化開采的要求,智能化控制水平高,降塵效果理想。從以上應用的四個工作面來看,既有綜采工作面又有綜放工作面,工作面高度2.2~8m,該智能化降塵系統的應用包括采煤機除塵系統、液壓支架智能除塵系統、轉載破碎除塵系統、順槽除塵系統。后期專門針對8m大采高工作面開發了刮板輸送機智能噴霧除塵系統,該系統實現了與綜采智能控制系統的聯動控制,可與綜采智能控制系統融為一體,為智能化開采條件下的群組協同工作奠定了基礎。
4 結語
智能化開采是一個統一平臺下的類似機器人協同的開采模式。智能化降塵是實現煤炭智能化開采的重要保障,未來的智能化降塵技術應該從傳感器的創新研制入手,融入物聯技術,搭上互聯網快車,用好機器學習,不僅能夠解決智能降塵和無塵礦井建設的問題,也能為智能化開采奠定基礎。
猜你喜歡
軍事文摘(2022年19期)2022-10-18 02:41:14
保健醫苑(2022年5期)2022-06-10 07:46:12
防爆電機(2022年1期)2022-02-16 01:14:06
小哥白尼(趣味科學)(2021年8期)2021-11-20 06:08:04
印刷工業(2020年4期)2020-10-27 02:45:52
模具制造(2019年3期)2019-06-06 02:10:54
中國交通信息化(2017年4期)2017-06-06 07:21:52
能源(2015年8期)2015-05-26 09:15:56
航天器工程(2014年5期)2014-03-11 16:35:55
河南科技(2014年18期)2014-02-27 14:14:58
