淺談低空無(wú)人機(jī)測(cè)繪精度影響因子
2020-04-08 09:36:55朱閆霞周玉雄
科技資訊 2020年4期
朱閆霞 周玉雄
摘? 要:低空無(wú)人機(jī)測(cè)繪遙感相對(duì)大飛機(jī)測(cè)繪遙感來(lái)說(shuō)具有低成本、高機(jī)動(dòng)、高時(shí)效、氣候影響小等特點(diǎn)已廣泛應(yīng)用于基礎(chǔ)測(cè)繪中,特別是局部小范圍進(jìn)行基礎(chǔ)測(cè)繪時(shí),以其先天的優(yōu)越性可以取代外業(yè)全數(shù)字化測(cè)圖和大飛機(jī)航空攝影測(cè)量,該文從對(duì)影響低空無(wú)人機(jī)測(cè)繪精度的航飛質(zhì)量和影像質(zhì)量的兩大因子分析,進(jìn)一步從硬件選型角度剖析了分別提高這兩大因子質(zhì)量的子因子,并對(duì)相機(jī)設(shè)置給出了建議,最后還對(duì)畸變差檢校做了初步研究,對(duì)重做畸變差檢校的條件做出了定量性地建議。
關(guān)鍵詞:低空無(wú)人機(jī)(UAV)? 攝影測(cè)量? 感光度? 畸變差
中圖分類(lèi)號(hào):P231 ? ?文獻(xiàn)標(biāo)識(shí)碼:A 文章編號(hào):1672-3791(2020)02(a)-0001-02
目前市場(chǎng)上部分無(wú)人機(jī)低空測(cè)繪遙感都難以達(dá)到預(yù)期的精度要求,特別是大比例尺基礎(chǔ)測(cè)繪項(xiàng)目。目前已有一些文獻(xiàn)資料從像控點(diǎn)的布設(shè),專(zhuān)業(yè)處理軟件、技術(shù)手段等角度來(lái)試圖提高低空無(wú)人機(jī)測(cè)繪成果精度。該文從UAV的航飛質(zhì)量和獲取的影像質(zhì)量?jī)纱笠蜃臃治觯瑥亩岢鲆恍┙ㄗh來(lái)提高UAV測(cè)繪產(chǎn)品精度。
1? 低空無(wú)人機(jī)測(cè)繪遙感設(shè)備的關(guān)鍵部分
低空無(wú)人機(jī)測(cè)繪遙感系統(tǒng)主要由飛機(jī)的機(jī)體、飛控系統(tǒng)、POS系統(tǒng)(通常是GPS+IMU)和航攝傳感器(即相機(jī))4個(gè)部分組成。飛控系統(tǒng)包含飛機(jī)上自動(dòng)控制系統(tǒng)和地面站兩部分,主要保障飛機(jī)能按指令完成任務(wù),保障飛機(jī)的可靠性和安全性。POS系統(tǒng)主要配合飛控系統(tǒng),將飛機(jī)的位置和姿態(tài)信息及時(shí)傳遞給飛控系統(tǒng),同時(shí)記錄(多采用內(nèi)插技術(shù))相機(jī)曝光點(diǎn)的位置信息和姿態(tài)信息。從成本上考慮,低空無(wú)人機(jī)測(cè)繪遙感系統(tǒng)上的POS系統(tǒng)一般精度很低,對(duì)后面高精度數(shù)據(jù)處理幫助不大,因此該文將從飛機(jī)的機(jī)體和相機(jī)的選型兩個(gè)角度入手,闡述它們對(duì)測(cè)繪精度的影響。
2? 低空無(wú)人機(jī)測(cè)繪精度的主要影響因子
航飛質(zhì)量、影像質(zhì)量、外業(yè)像控點(diǎn)的密度和分布、內(nèi)業(yè)處理工藝是影響低空UAV測(cè)繪成果精度的主要因子。目前外業(yè)像控點(diǎn)的布設(shè)已有專(zhuān)門(mén)指導(dǎo)規(guī)范,而內(nèi)業(yè)處理工藝也比較成熟,因此航飛質(zhì)量和影像質(zhì)量是目前市場(chǎng)上部分無(wú)人機(jī)測(cè)繪成果精度達(dá)不到預(yù)期目標(biāo)的主要因素。
而航飛質(zhì)量主要是指影像重疊度、影像單位像素對(duì)應(yīng)地面分辨率、影像俯仰角、測(cè)滾角和旋偏角、航高一致性和測(cè)區(qū)覆蓋無(wú)漏洞性;影像質(zhì)量主要包括影像的清晰明暗度、影像的云層覆蓋率。
目前市場(chǎng)上的UAV在重疊度和測(cè)區(qū)覆蓋無(wú)漏洞性方面都采用提高航向和旁向重疊度的方式來(lái)飛行,地面分辨率方面采用設(shè)計(jì)飛行相對(duì)最高航高這一點(diǎn)來(lái)保證。影像質(zhì)量中的云層覆蓋率采用優(yōu)質(zhì)天氣狀況來(lái)規(guī)避。因此,難以保證的是傾角(包含俯仰角和測(cè)滾角)和旋偏角以及影像質(zhì)量中的清晰度。
2.1 無(wú)人機(jī)機(jī)體
目前市場(chǎng)上有多種無(wú)人機(jī)型號(hào),主要分為兩大類(lèi):重量較輕的手拋型無(wú)人機(jī)和重量較重的滑跑或彈射的無(wú)人機(jī)。無(wú)人機(jī)機(jī)體在飛行過(guò)程中的一個(gè)重要技術(shù)參數(shù)是飛行姿態(tài)(俯仰角、測(cè)滾角和旋偏角)要控制在一定范圍之內(nèi),通常俯仰角和測(cè)滾角要控制在5°范圍內(nèi),最大不超過(guò)12°,而旋偏角要控制在15°范圍內(nèi),最大不超過(guò)30°[1],當(dāng)這些角度超出規(guī)范規(guī)定范圍時(shí),則會(huì)造成因視角變化大而帶來(lái)的同名像點(diǎn)觀測(cè)不準(zhǔn)而引起的空三加密整體精度降低的問(wèn)題。影響這些的一個(gè)最重要因素就是飛機(jī)機(jī)體的抗側(cè)面氣流性。從慣性定律來(lái)講,質(zhì)量大的物體慣性就大,但體積大的物體受氣流的面積就大,因此要想減小側(cè)面氣流對(duì)飛行姿態(tài)的影響,就要增大機(jī)體質(zhì)量,減小機(jī)體表面積(不含機(jī)翼),所以在要求高精度的后期測(cè)繪成果情況下,無(wú)人機(jī)選型時(shí),盡可能地選擇機(jī)體受側(cè)面氣流影像小的機(jī)體,即機(jī)身小的機(jī)體,同時(shí)在發(fā)動(dòng)機(jī)功率足夠的情況下,優(yōu)先選擇重量大的飛機(jī)。
2.2 無(wú)人機(jī)測(cè)繪遙感傳感器
相對(duì)無(wú)人機(jī)的機(jī)體來(lái)說(shuō),整個(gè)系統(tǒng)的傳感器,即普通單反相機(jī),對(duì)測(cè)繪精度影響更大。相機(jī)主要由兩部分組成,即機(jī)身(包含電池)和鏡頭。機(jī)身和鏡頭兩者對(duì)測(cè)繪精度影響都很大。
2.2.1 相機(jī)機(jī)身感光器CCD
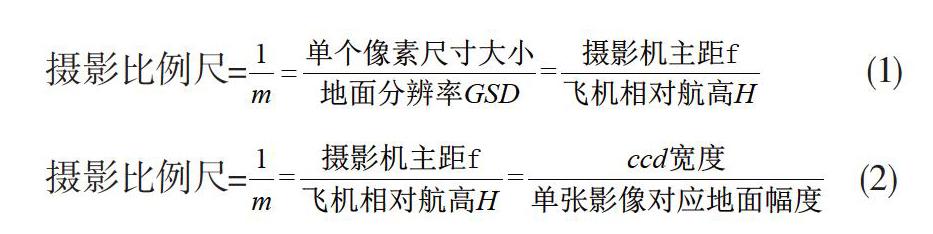
機(jī)身中最重要的CCD(部分相機(jī)是CMOS,該文后面部分將只寫(xiě)CCD)和處理器。其中CCD最重要的3個(gè)參數(shù)是感光度、像素?cái)?shù)量和單個(gè)像素尺寸大小。單個(gè)像素尺寸大小越小,像素尺寸小的CCD像元之間,因制作工藝的問(wèn)題,存在漏洞現(xiàn)象就越普遍,因此電流相互干擾就越大,噪點(diǎn)就越多,加上光線衍射現(xiàn)象,感光度會(huì)越差。在相同進(jìn)光量和相同感光度情況下,單個(gè)像元尺寸小的相機(jī)拍攝出來(lái)的影像會(huì)偏模糊。在相機(jī)單個(gè)像素尺寸大小確定的情況下,當(dāng)鏡頭(在此指定焦鏡頭)選定后,要獲取某個(gè)指定GSD(地面空間分辨率)的影像,則飛機(jī)的飛行的相對(duì)地面高度就確定了。飛機(jī)的相對(duì)地面高度由式(1)確定:
攝影比例尺=? ? ? ? ? (1)
攝影比例尺=? ?(2)
由式(2)可知:當(dāng)CCD幅寬確定(通常是由相機(jī)機(jī)身自身特性決定),則飛機(jī)相對(duì)地面高度越高,則單張影像對(duì)應(yīng)地面的幅寬就越寬,單張影像覆蓋地面面積就越大,整個(gè)測(cè)區(qū)可以拍攝更少的相片,可以減少測(cè)區(qū)相片數(shù)量,在外業(yè)像控點(diǎn)數(shù)相同條件下可以提高單位相片上的像控點(diǎn)數(shù),間接效果是縮短了布點(diǎn)基線間隔。而CCD幅寬=CCD單個(gè)像素尺寸大小×CCD寬度方向像素?cái)?shù)量,因此,在像素尺寸不能太小的情況下(太小在現(xiàn)有工藝條件下容易產(chǎn)生噪點(diǎn)),要減少整個(gè)測(cè)區(qū)相片數(shù)量,則盡可能地用全幅相機(jī)(CCD尺寸為24mm×36mm)或中幅相機(jī)(CCD尺寸為36mm×48mm),前者代表有目前廣泛用于航測(cè)的佳能5D MarkII和尼康D800/810相機(jī),后者的代表有飛思P65+。
大CCD幅寬還有助于提高航攝影像的基高比,基高比的定義見(jiàn)式(3):
(3)
其中攝影基線L為飛機(jī)拍攝左右兩張影像時(shí)相機(jī)鏡頭所處各自位置的連線,當(dāng)飛行相對(duì)航高確定后,要提高基高比,只能增大攝影基線。
2.2.2 定焦鏡頭
與機(jī)身同樣重要的還有鏡頭。鏡頭上有幾個(gè)技術(shù)指標(biāo),分別是主距、最大光圈和畸變系數(shù)[3]。用于測(cè)繪遙感的相機(jī)鏡頭一個(gè)非常重要的特性就是定焦,拍攝過(guò)程中焦距不變,從著名的共線條件方程中可以看出后期數(shù)據(jù)處理的目標(biāo)是解求出感興趣目標(biāo)地物的空間三維坐X、Y、Z,而9個(gè)旋轉(zhuǎn)矩陣參數(shù)和Xs、Ys、Zs是中間要解求的元素(中間成果),后期數(shù)據(jù)處理中一般是通過(guò)空三加密的方式解求的。一般一個(gè)空三加密解算測(cè)區(qū)多采用同一款相機(jī)拍攝,在光束法平差中為減少未知數(shù)數(shù)量,并且要求像方坐標(biāo)為觀測(cè)值,因此相機(jī)鏡頭主距是不可變的,為定值,通常要求精確到微米級(jí)。
2.2.3 航拍時(shí)最佳光圈
通常一款鏡頭有它的最佳解析力,即鏡頭的分辨率,鏡頭分辨率較低時(shí)會(huì)影像會(huì)出現(xiàn)模糊現(xiàn)象,即銳度低。
通常一款鏡頭的銳度處于光圈值兩端的最差,例如f/1.4和f/22的最差,中間值最好,但一般最大光圈值降低兩檔后的銳度接近或基本等同于最佳銳度,即最佳解析力。因此航攝時(shí)所用光圈最好不要用最大光圈,建議使用最大光圈減小兩檔后的光圈。
2.2.4 相機(jī)鏡頭的畸變
相機(jī)鏡頭的畸變,主要指相機(jī)鏡頭的光學(xué)畸變差,它是影響像點(diǎn)坐標(biāo)質(zhì)量的一項(xiàng)重要誤差。相機(jī)鏡頭的畸變主要分為徑向畸變差(Radial Distortion)和偏心畸變差(Decentering Distortion)兩種。
普通民用單反相機(jī)拍攝液晶顯示器上的標(biāo)準(zhǔn)格網(wǎng)的影像,因此普通民用單反相機(jī)用于測(cè)繪,在所拍攝的航片實(shí)際使用過(guò)程中,必須要考慮其畸變,即通常需要對(duì)其鏡頭做去畸變改正。該項(xiàng)工作一般認(rèn)為可在無(wú)人機(jī)航攝前做,也可以在航攝后做,但筆者根據(jù)大量實(shí)際生產(chǎn)中光束法平差最終的像點(diǎn)觀測(cè)精度(如patb平差結(jié)果的sigma值)結(jié)果,建議航攝前檢校。
目前難以判斷的是相機(jī)拍攝多少架次或相隔多長(zhǎng)時(shí)間需要重新檢校,筆者經(jīng)過(guò)多個(gè)項(xiàng)目的實(shí)際生產(chǎn)研究發(fā)現(xiàn),可以根據(jù)上一個(gè)項(xiàng)目中空三加密解算時(shí)平差收斂的sigma值(代表像點(diǎn)的觀測(cè)精度)的大小來(lái)判斷相機(jī)在這次航拍前是否要重做檢校,筆者實(shí)驗(yàn)的結(jié)果是當(dāng)平差收斂的sigma值在1/2個(gè)像素左右,如佳能5D MarkII相機(jī)CCD像元大小為6.41個(gè)微米,當(dāng)像點(diǎn)觀測(cè)精度達(dá)到3左右時(shí),表明當(dāng)前已知的畸變差系數(shù)同當(dāng)前相機(jī)鏡頭的狀態(tài)符合。當(dāng)平差收斂的sigma值超過(guò)2/3個(gè)像素但小于1個(gè)像素時(shí),表明當(dāng)前已知的畸變差系數(shù)已經(jīng)開(kāi)始同相機(jī)鏡頭狀況不符合了,需要重新檢校,如果不重新檢校,則需要多布設(shè)外業(yè)像控點(diǎn),否則精度會(huì)偏低。當(dāng)sigma值超過(guò)1個(gè)像素,則當(dāng)前已知的畸變差系數(shù)完全不能滿足高精度的測(cè)繪需求,必須重新做畸變差檢校。
3? 結(jié)語(yǔ)
該文主要從低空無(wú)人機(jī)測(cè)繪設(shè)備系統(tǒng)方面分析了影響低空無(wú)人機(jī)測(cè)繪精度的因子,指出了無(wú)人機(jī)的機(jī)體的穩(wěn)定性和抗風(fēng)性對(duì)航攝影飛行質(zhì)量的影響比較大,無(wú)人機(jī)選型時(shí)建議選擇質(zhì)量大但機(jī)體的有效面積小(不含機(jī)翼)的無(wú)人機(jī)。相機(jī)包括鏡頭對(duì)影像質(zhì)量影像比較大,從基高比和單位相片上的有效像控點(diǎn)數(shù)量比上看,大CCD(或CMOS)幅面的相機(jī)要優(yōu)于小幅面的相機(jī),因此筆者建議優(yōu)先選擇全畫(huà)幅或中畫(huà)幅單方相機(jī),優(yōu)先選擇高感光度效果號(hào)的相機(jī)。另外從相移補(bǔ)償上考慮,部分相機(jī)具有光學(xué)防抖功能,分機(jī)身防抖和鏡頭防抖兩種,優(yōu)先選擇帶有光學(xué)防抖功能相機(jī)。在鏡頭的選定上,建議選擇定焦大光圈相機(jī)。在設(shè)置上,從成像清晰度上考慮,同高感效果好的機(jī)身搭配時(shí),可在最大光圈基礎(chǔ)上,降低兩檔光圈來(lái)設(shè)定。在室外光線比較強(qiáng)的情況下,可以使用最優(yōu)高感,即是不引入明顯噪點(diǎn)時(shí)的最大感光度。最后所有低空無(wú)人機(jī)測(cè)繪遙感相機(jī)都是非專(zhuān)業(yè)量測(cè)相機(jī),鏡頭帶有明顯的畸變差,因此,在生產(chǎn)過(guò)程中必須做相機(jī)畸變檢校,筆者建議在航飛前做檢校,該文最后還給出了判斷何時(shí)應(yīng)該重做畸變檢校的一般判斷原則。
參考文獻(xiàn)
[1] CH/Z 3005-2010,低空數(shù)字航空攝影規(guī)范[S].2010.
[2] 張劍清,潘勵(lì),王樹(shù)根.攝影測(cè)量學(xué)[M].武漢:武漢大學(xué)出版社,2009.
[3] 王朝南.光圈與光圈系數(shù)簡(jiǎn)論[J].照相機(jī),2001(1):20-21.
[4] 馬永政.無(wú)人低空遙感系統(tǒng)的設(shè)計(jì)與實(shí)現(xiàn)[D].解放軍信息工程大學(xué),2009.

- 科技資訊的其它文章
- 德陽(yáng)創(chuàng)建“放心舒心消費(fèi)城市”存在的 問(wèn)題及其對(duì)策
- 如何在小學(xué)體育教學(xué)中對(duì)學(xué)生進(jìn)行意志品質(zhì)的培養(yǎng)
- 高職電子信息類(lèi)小班專(zhuān)業(yè)現(xiàn)代學(xué)徒制實(shí)踐研究
- 增強(qiáng)現(xiàn)實(shí)技術(shù)對(duì)孤獨(dú)癥兒童干預(yù)習(xí)得技能遷移的影響
- 淺談新時(shí)期高職院校思政教育面臨的挑戰(zhàn)
- 地方科技情報(bào)機(jī)構(gòu)服務(wù)科技創(chuàng)新對(duì)策分析