自動化集裝箱軌道式龍門起重機雙箱自動抓放功能設(shè)計與實現(xiàn)
2020-04-10 07:08:54
港口裝卸 2020年1期
上海振華重工(集團)股份有限公司
1 引言
隨著世界貿(mào)易的蓬勃發(fā)展,集裝箱碼頭成為了海陸物流運輸?shù)臉屑~。由于人力成本的不斷提升以及日益嚴(yán)格的環(huán)保要求,集裝箱碼頭的運維管理朝著自動化、智能化方向不斷深入發(fā)展。自動化集裝箱碼頭因其安全可靠性高、作業(yè)效率高、場地利用率高、環(huán)境友好、人力成本低等顯著優(yōu)點而成為碼頭發(fā)展優(yōu)先選擇的方向[1]。
自動化集裝箱碼頭的發(fā)展,對自動化設(shè)備和系統(tǒng)提出了新的要求。洋山深水港四期自動化碼頭在自動化軌道式龍門起重機(以下簡稱軌道吊)上增設(shè)了可以抓放20 ft集裝箱的吊具,實現(xiàn)了雙20 ft集裝箱在堆場和AGV上的自動抓放,在海側(cè)裝卸船任務(wù)繁忙的情況下,可以明顯提升作業(yè)效率。由于吊具雙箱無法根據(jù)單個集裝箱進(jìn)行吊具微調(diào),要實現(xiàn)一次抓取2個集裝箱,需要能夠精確檢測雙箱間隙和雙箱的姿態(tài),從而實現(xiàn)精準(zhǔn)抓放箱。為實現(xiàn)軌道吊雙箱自動化的功能,從調(diào)度、控制、掃描定位等方面描述其實現(xiàn)過程和方案,重點描述了目標(biāo)檢測系統(tǒng)掃描定位精度的優(yōu)化改進(jìn)。
2 項目簡介
洋山深水港四期自動化碼頭堆場長度為414 m,海側(cè)為自動引導(dǎo)小車AGV作業(yè)交互區(qū)域以及4個輔助AGV支架,陸側(cè)為內(nèi)/外集卡作業(yè)交互區(qū)。海側(cè)軌道吊主要對岸橋進(jìn)行裝船、卸船作業(yè)或者堆場內(nèi)部轉(zhuǎn)堆作業(yè),陸側(cè)軌道吊主要對外來集卡進(jìn)行裝卸車作業(yè)。海陸側(cè)軌道吊在堆場內(nèi)和交換區(qū)已經(jīng)實現(xiàn)了對單個20 ft、40 ft、45 ft標(biāo)準(zhǔn)集裝箱的自動化作業(yè)。由于在船舶作業(yè)中,雙20 ft箱占比較大,到軌道吊海側(cè)進(jìn)行作業(yè)時,需要把雙箱拆單進(jìn)行作業(yè),海側(cè)軌道吊的作業(yè)能力不足,限制了自動化碼頭的整體運行效率。因此海側(cè)軌道吊雙箱作業(yè)功能的實現(xiàn),對提升作業(yè)效率意義重大。
3 系統(tǒng)簡介
海側(cè)軌道吊的雙箱作業(yè)功能,需要上層TOS(生產(chǎn)管理系統(tǒng))、BMS(堆場管理系統(tǒng))、下層ACCS(自動化控制系統(tǒng))以及TDS(Target detection system,目標(biāo)檢測系統(tǒng))的配合實現(xiàn)。因此,需根據(jù)新的工況要求對這幾大系統(tǒng)進(jìn)行優(yōu)化和改進(jìn)。
TOS是用于管理和控制碼頭作業(yè)各環(huán)節(jié)的計算機管理系統(tǒng),其主要包含船舶計劃、船舶策劃、道口控制、堆場監(jiān)控、船舶監(jiān)控、機械監(jiān)控統(tǒng)計分析、設(shè)備維護、受理等功能,是碼頭生產(chǎn)管理的核心。BMS是用于管理和控制自動化軌道吊的管理系統(tǒng),其主要功能為接收并分析TOS發(fā)送的指令,并進(jìn)一步將指令細(xì)分發(fā)送給下層自動化控制系統(tǒng)。TOS和BMS通過數(shù)據(jù)庫交互,根據(jù)約定的接口,由TOS安排雙箱吊計劃,BMS管理分解并執(zhí)行計劃。
3.1 堆箱規(guī)則
雙箱吊的功能與其他單箱的不同之處在于,雙箱吊是抓放2個20 ft箱,工況較為復(fù)雜,在地面上,2個箱子可能會出現(xiàn)八字形擺放、錯位擺放、箱子間隙不等的情況[2]。要實現(xiàn)雙20 ft箱作業(yè)計劃,箱區(qū)堆場的堆箱規(guī)則尤為重要。
(1) 堆場內(nèi)同一貝位不能同時放大小箱。堆場規(guī)則大箱放在偶數(shù)貝位,小箱放在奇數(shù)貝位。這種排放規(guī)則便于規(guī)模化管理,方便抓放箱,不會出現(xiàn)小箱上面疊大箱導(dǎo)致位置放偏的情況。
(2) 堆場一般有105個貝位,每個貝位有10個列,每個位置放箱不超6層。海側(cè)有5個AGV交互位和5個支架位,陸側(cè)有5個陸側(cè)車道位,可由此計算箱區(qū)最大放箱量。
(3) 堆五過六。一般情況下箱子有2.9 m箱高和2.6 m箱高,而軌道吊吊具安全高度在19.7 m左右。以2.9 m箱為例,箱子不能超過6層,否則會有撞箱危險。因此堆場內(nèi)常見的最大層高都不到6層(多為5層)。
(4) 同出口的和同卸貨港的箱子放在一起。
(5) 同屬性的箱子放一列。
(6) 進(jìn)口箱子多放在大貝位,出口箱子多放在小貝位(大貝位靠近陸側(cè),小貝位靠近海側(cè))。
(7) 雙20 ft和20 ft、40 ft、45 ft集裝箱不能混堆,雙箱吊作業(yè)須要對應(yīng)的雙20 ft的貝位進(jìn)行鎖定。
3.2 雙箱吊調(diào)度計劃
TOS調(diào)度雙箱吊功能,需要排雙箱吊大計劃,其與普通大計劃分離。如果對應(yīng)箱區(qū)有普通大計劃,那么普通大計劃的數(shù)量會受到已經(jīng)做的雙箱吊數(shù)量的影響,即雙箱吊的數(shù)量仍然視為20 ft箱進(jìn)入該箱區(qū)的數(shù)量。使用雙箱吊功能需要如下條件:
(1) 在TOS中把軌道吊雙箱吊功能打開,打開后所有雙箱都會帶上雙箱標(biāo)記。
(2) 安排堆存大計劃后,安排自動生成雙20 ft大計劃,將雙20 ft貝位鎖定。
(3) 僅選擇可作業(yè)雙箱的箱區(qū),且僅選擇對應(yīng)箱區(qū)的不為40 ft貝位的空排。
(4) 大計劃參數(shù)設(shè)置,可設(shè)置陸側(cè)選位極限貝位。
在生成大計劃時,可讀取大計劃參數(shù)設(shè)置內(nèi)容,控制大計劃范圍的最陸側(cè)區(qū)域。根據(jù)設(shè)定的數(shù)值,作為雙箱吊的陸側(cè)可作業(yè)極限位置。
在系統(tǒng)生成軌道吊雙箱吊大計劃時,會判定箱區(qū)軌道吊的屬性,僅生成可作業(yè)的箱區(qū)。對應(yīng)箱區(qū)存在空排位的情況下,以空排位作為生成大計劃的條件。根據(jù)具體的船名航次信息,生成的對應(yīng)的普通箱大計劃與雙20 ft大計劃范圍,兩者相互獨立、互不影響。系統(tǒng)會鎖定雙20 ft大計劃范圍位置,無法自動調(diào)整。另外,雙20 ft計劃范圍無可選位置時,自動拆分為單20 ft作業(yè),且在中計劃參數(shù)設(shè)置中新增參數(shù)。不同屬性箱自動拆分為單箱吊作業(yè),可由人工對參數(shù)進(jìn)行調(diào)整。不同屬性主要包含重箱不同箱狀態(tài)、空箱不同持箱人等。當(dāng)前軌道吊雙箱吊,并未加入箱區(qū)整理自動歸并功能,在使用時,仍然需要提前人工整理出相應(yīng)的空排位。此外,若計劃中設(shè)置所有類型雙箱吊均不拆單,箱區(qū)會出現(xiàn)部分混堆的情況,需要人工整理。
BMS處理TOS發(fā)送來的指令時,會預(yù)先讀取數(shù)據(jù)庫相關(guān)字段,查看該軌道吊是否允許雙箱作業(yè)。只有在當(dāng)前軌道吊支持雙箱作業(yè)的條件下,才會繼續(xù)拆分指令,發(fā)送給自動化控制系統(tǒng)。
4 自動化控制系統(tǒng)
4.1 系統(tǒng)介紹
洋山深水港四期自動化軌道吊的ACCS分別采用CAN和RS422串口和TDS以及SDS(Suspension Detection System,吊具檢測系統(tǒng))進(jìn)行數(shù)據(jù)交互,同時該系統(tǒng)通過IP網(wǎng)絡(luò)與BMS管理系統(tǒng)進(jìn)行通信和交互。
4.2 控制流程
BMS接收到TOS雙箱任務(wù)后,發(fā)送指令到ACCS,ACCS根據(jù)指令類型和指令對象將對應(yīng)指令分解成單個分指令。如BMS發(fā)送抓AGV區(qū)雙箱,ACCS將指令分解成起升上升到安全高度后大車小車移動、起升下降到著箱位置、閉鎖和起升上升4個分指令。
(1) 大小車移動。起升上升至安全高度;大小車移動至目標(biāo)位置,同時吊具中鎖下并且伸到默認(rèn)中鎖間距;系統(tǒng)檢測到起升到達(dá)安全高度、大小車移動到目標(biāo)位置,吊具中鎖伸到指令位置后判定任務(wù)完成,進(jìn)行下一步指令。
(2) 起升下降至著箱位置。在大車距離目標(biāo)位置小于500 mm啟動TDS檢測;TDS檢測完成給出中鎖間隙后,ACCS調(diào)節(jié)中鎖到目標(biāo)間距,調(diào)整到位后起升全速下降;根據(jù)TDS的目標(biāo)值和SDS的實時吊具姿態(tài)檢測值,起升下降的同時調(diào)節(jié)吊具微動。如果到達(dá)目標(biāo)高度上方0.5 m前吊具調(diào)節(jié)完成,則起升直接下降至著箱;如果還未調(diào)節(jié)完成則停止下降,調(diào)節(jié)吊具,吊具調(diào)整到位后起升下降至著箱。著箱后,系統(tǒng)根據(jù)當(dāng)前大車、小車位置和起升高度等,判斷起升小車大車已經(jīng)到位,任務(wù)完成,執(zhí)行下一指令。
(3) 吊具閉鎖。ACCS發(fā)出吊具閉鎖分指令給基礎(chǔ)PLC,當(dāng)?shù)蹙咄瓿砷]鎖后,系統(tǒng)判定該任務(wù)完成,執(zhí)行下一條指令。
(4) 起升上升。閉鎖完成后,ACCS下發(fā)起升上升分指令的同時發(fā)送吊具回零命令,起升上升至上停止后所有指令執(zhí)行結(jié)束,等待BMS下一個指令。
4.3 效率優(yōu)化
起升上升到安全高度以后,為了增加作業(yè)效率,ACCS在動大車、小車的同時根據(jù)任務(wù)信息在起升到達(dá)安全高度以后將中鎖伸出,并且將中鎖間距伸到對應(yīng)的默認(rèn)距離(堆場區(qū)400 mm,AGV區(qū)和岸橋裝AGV距離保持一致為1 550 mm),以避免大小車到位后再伸縮中鎖。
采用一邊動大車一邊掃描的動態(tài)掃描方式,在大車到位后掃描數(shù)據(jù)已經(jīng)傳輸至ACCS,減少了到位再掃描的等待時間,提高了作業(yè)效率。
4.4 聯(lián)鎖保護
(1) 伸縮超時保護。在ACCS給出命令到單機后,單機長時間不動作或者長時間未能到目標(biāo)狀態(tài),系統(tǒng)判斷為故障,請求司機介入。
(2) 檢測系統(tǒng)保護。針對八字箱、錯位箱、兩箱高低不一樣等異常工況,通知ACCS無法進(jìn)行自動作業(yè),ACCS收到異常信息后申請遠(yuǎn)程司機介入。
(3) 安全高度保護。ACCS在起升達(dá)到安全高度以上才會進(jìn)行吊具中鎖上下和伸縮,避免在安全高度以下伸縮碰到旁邊貝位箱子;堆場內(nèi)增加抓放5層以上雙箱指令校驗保護等。
5 掃描定位系統(tǒng)
采用機器視覺和激光器傳感器技術(shù),對吊具姿態(tài)、集裝箱姿態(tài)、雙箱間隙進(jìn)行精確檢測。軌道吊結(jié)合吊具位置檢測系統(tǒng),就可以實現(xiàn)軌道吊與目標(biāo)車輛的自動對位、AGV交互區(qū)自動抓放雙箱,以及堆場自動抓放雙箱,大幅度提升自動化效率。
5.1 集裝箱位置檢測
TDS主要用于檢測集裝箱的位置,在洋山深水港四期自動化軌道吊中也用來檢測AGV小車位置。TDS的激光掃描定位單元安裝在門架小車上靠近陸側(cè),激光掃描定位單元通過以太網(wǎng)和CAN通信與電氣房中的主控制器進(jìn)行數(shù)據(jù)傳輸,并由主控制器進(jìn)行數(shù)據(jù)處理,同時主控制器還通過CAN通信與貝加萊PLC進(jìn)行通信(見圖1)。
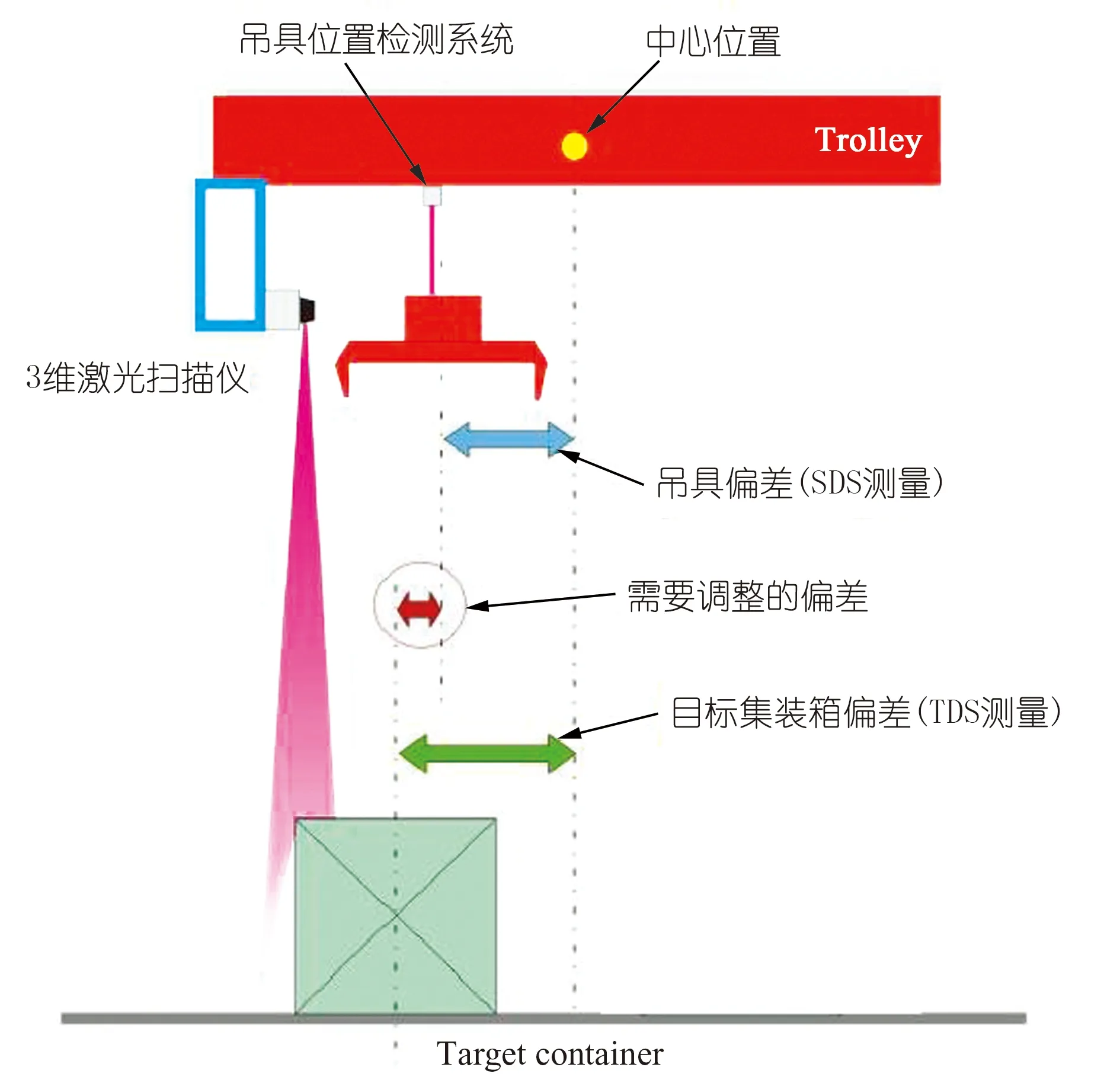
圖1 自動抓箱過程圖
5.2 硬件設(shè)計
二維激光儀和馬達(dá)轉(zhuǎn)動機構(gòu)實現(xiàn)了三維激光點云數(shù)據(jù)的采集,實現(xiàn)了長距離、非接觸、高精度三維空間位置傳感器的設(shè)計。由伺服馬達(dá)帶動激光傘面繞軸旋轉(zhuǎn),形成三維激光點云,在計算機中再現(xiàn)目標(biāo)物體的三維空間形狀。整套系統(tǒng)包括控制器、轉(zhuǎn)動機構(gòu)以及傘面激光器(見圖2)。
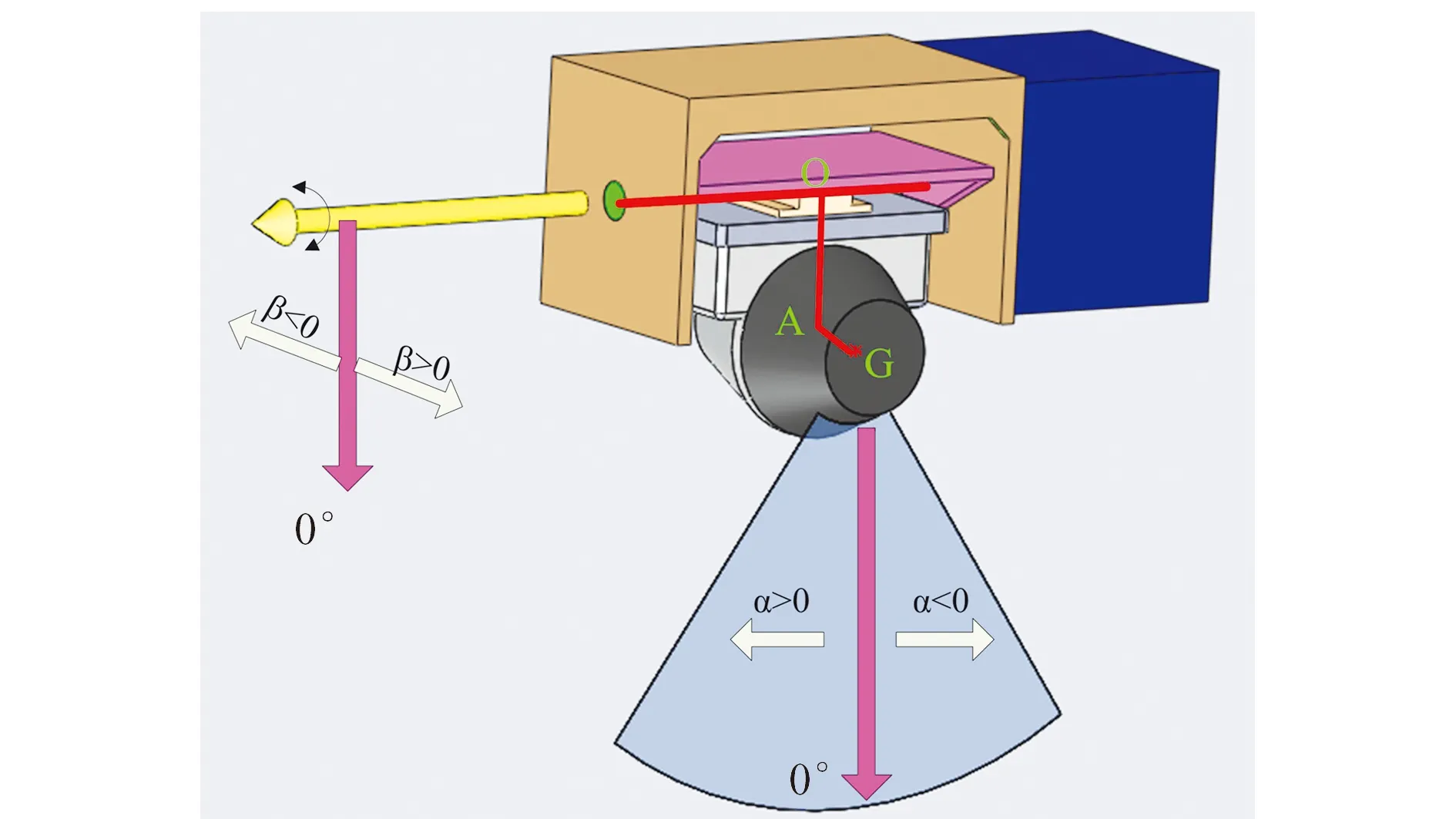
圖2 三維轉(zhuǎn)動機構(gòu)
5.3 軟件設(shè)計
馬達(dá)通過CAN組網(wǎng),使得1臺控制器可以控制多臺轉(zhuǎn)動機構(gòu),同時還可以與上位機進(jìn)行命令交互。顯示畫面采用OpenGL技術(shù),可以實時顯示采集的三維空間點云畫面。系統(tǒng)環(huán)境采用Windows,開發(fā)軟件采用Vs2010,OpenGL+MFC。
5.4 雙箱識別算法實現(xiàn)
(1)點云數(shù)據(jù)采集和解析。起重機到達(dá)指定的位置后,通過激光器雷達(dá)定位系統(tǒng)掃描目標(biāo)車輛的輪廓信息。轉(zhuǎn)動機構(gòu)三維數(shù)據(jù)空間轉(zhuǎn)化模型見圖3,OX為轉(zhuǎn)動軸,G為激光器光心,OG的距離為定值d=93 mm。在采樣時刻,系統(tǒng)獲取激光器掃描角α,馬達(dá)轉(zhuǎn)動角度β,掃描距離GB=l。
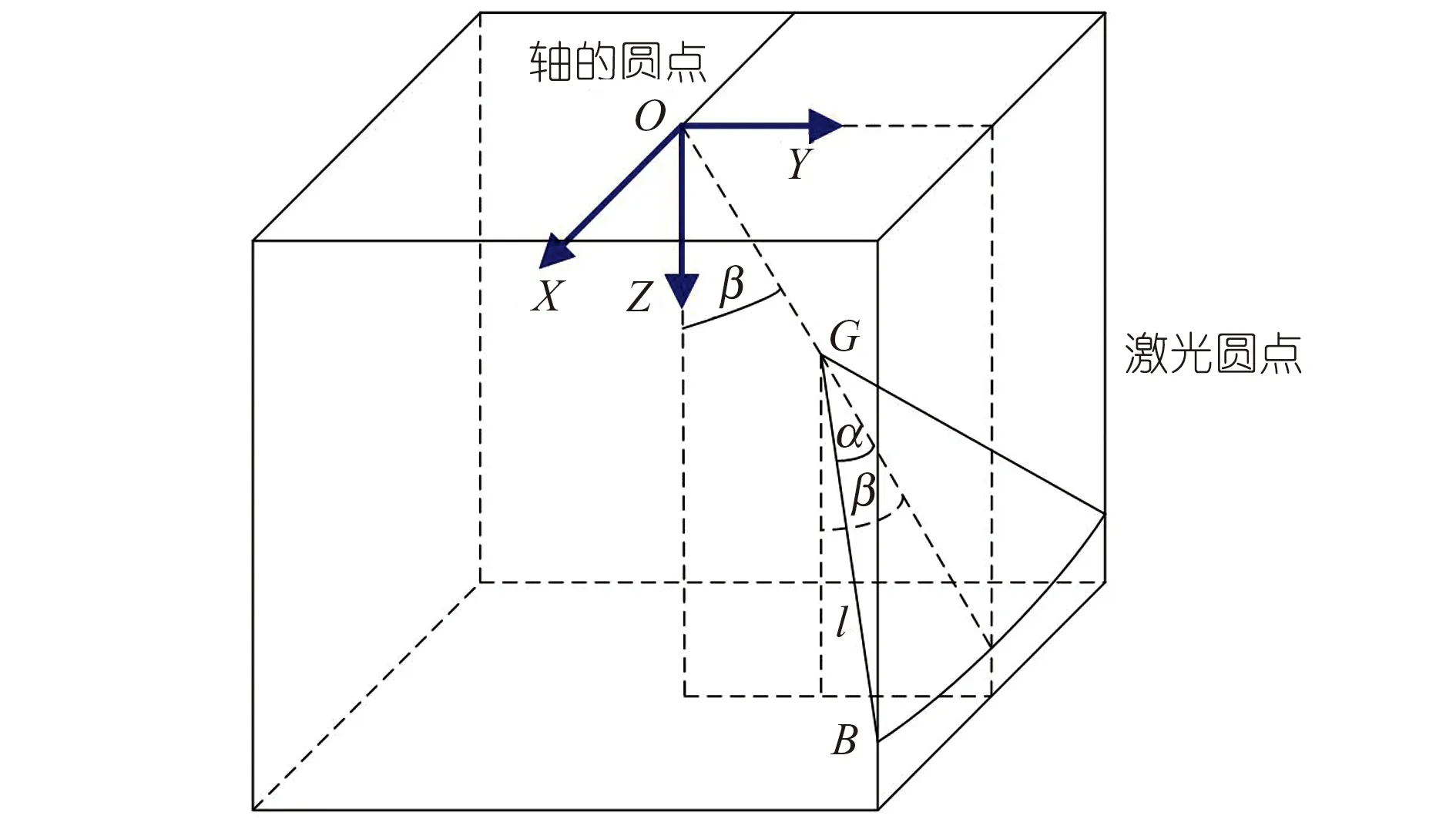
圖3 坐標(biāo)模型圖
采樣點B處的三維坐標(biāo)值是:
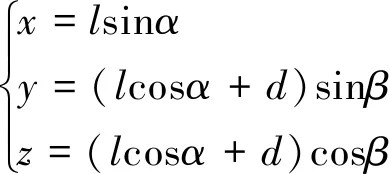
(1)
(2) 坐標(biāo)變換。數(shù)據(jù)采集并解析后,由于三維激光雷達(dá)本身安裝位置等,需要將坐標(biāo)進(jìn)行旋轉(zhuǎn)和平移,將坐標(biāo)原點移動到小車中心。
(3) 點云數(shù)據(jù)濾波。用三維激光雷達(dá)獲取的點云數(shù)據(jù),不可避免含有噪聲,如被測物體的噪聲、三維激光器的噪聲、測量環(huán)境(雨、霧)的噪聲等。對于隨機噪聲,由于掃描到的數(shù)據(jù)是規(guī)則點云數(shù)據(jù),可利用中值濾波來實現(xiàn)。由測量環(huán)境造成的噪聲點(如由于吊具、起重機本身對激光器視線的遮擋,或大雨大霧天氣影響)一般屬于離散點,與主體點云數(shù)據(jù)相獨立,可采取距離分片濾波法,根據(jù)起重機此時實際的運行情況,如起升高度、吊具尺寸等,濾除離散點云數(shù)據(jù)。通過這兩種濾波方法,可大大提高數(shù)據(jù)可靠性及穩(wěn)定性,減少環(huán)境對識別精度的影響。
(4) AGV交互區(qū)自動抓取雙箱。針對AGV交互區(qū),借助TDS系統(tǒng)對集裝箱輪廓進(jìn)行掃描。同時,結(jié)合AGV工況邊動大車邊掃描集裝箱輪廓,實現(xiàn)快速準(zhǔn)確檢測雙箱的位置和間隙,從而成功抓放雙20 ft箱。
(5) 堆場雙箱功能自動抓放。堆場存在2臺機混抓混放的情況,因此堆場雙20 ft集裝箱可能出現(xiàn)八字箱、錯位箱、兩箱高低不一致等形態(tài)。為使吊具順利抓到目標(biāo)集裝箱,需要檢測系統(tǒng)提供更精確的集裝箱位置以及姿態(tài),在抓放箱前判斷雙箱是否能正常抓取,將相關(guān)信息上傳至控制系統(tǒng),并根據(jù)當(dāng)前檢測結(jié)果進(jìn)行決策是自動抓放還是走異常流程。
6 結(jié)語
洋山深水港四期自動化碼頭已實現(xiàn)了5個箱區(qū)的海側(cè)軌道吊自動化雙箱作業(yè)。經(jīng)過實際生產(chǎn)作業(yè),目前雙箱功能運行良好,取得了預(yù)期效果,大大提高了海側(cè)軌道吊的工作效率。
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
新作文·小學(xué)低年級版(2021年9期)2021-11-27 07:57:46
學(xué)生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
測控技術(shù)(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
電信科學(xué)(2016年10期)2016-11-23 05:11:56
故事大王(2016年7期)2016-09-22 17:30:08
西安航空學(xué)院學(xué)報(2014年5期)2014-07-13 01:27:52
機電信息(2014年27期)2014-02-27 15:53:56