UltraFlex太陽翼有序展開動力學建模與分析
2020-04-15 09:27:36辛鵬飛劉志超榮吉利吳志培
宇航學報 2020年3期
辛鵬飛,劉志超,榮吉利,劉 鋮,吳志培,劉 賓
(1. 北京理工大學宇航學院,北京 100081;2. 北京空間飛行器總體設計部,北京 100094;3. 空間物理重點實驗室,北京 100076)
0 引 言
20世紀90年代,美國ABLE(后改為為ATK,現為諾格)公司研發出一種圓形柔性薄膜太陽翼UltraFlex[1],如圖1中所示,它具有結構緊湊、質量輕、功率質量比高、低轉動慣量、展開剛度高、可重復展收和擴展性好等特點[1],太陽翼分塊數量(或肋條數量)可根據任務類型自由選擇。不同于以往的柔性基板式太陽能電池陣,UltraFlex太陽翼結構無伸展機構不含驅動電機,僅依靠位于結構中央的扭簧驅動展開,收攏體積小,展開可靠性高。
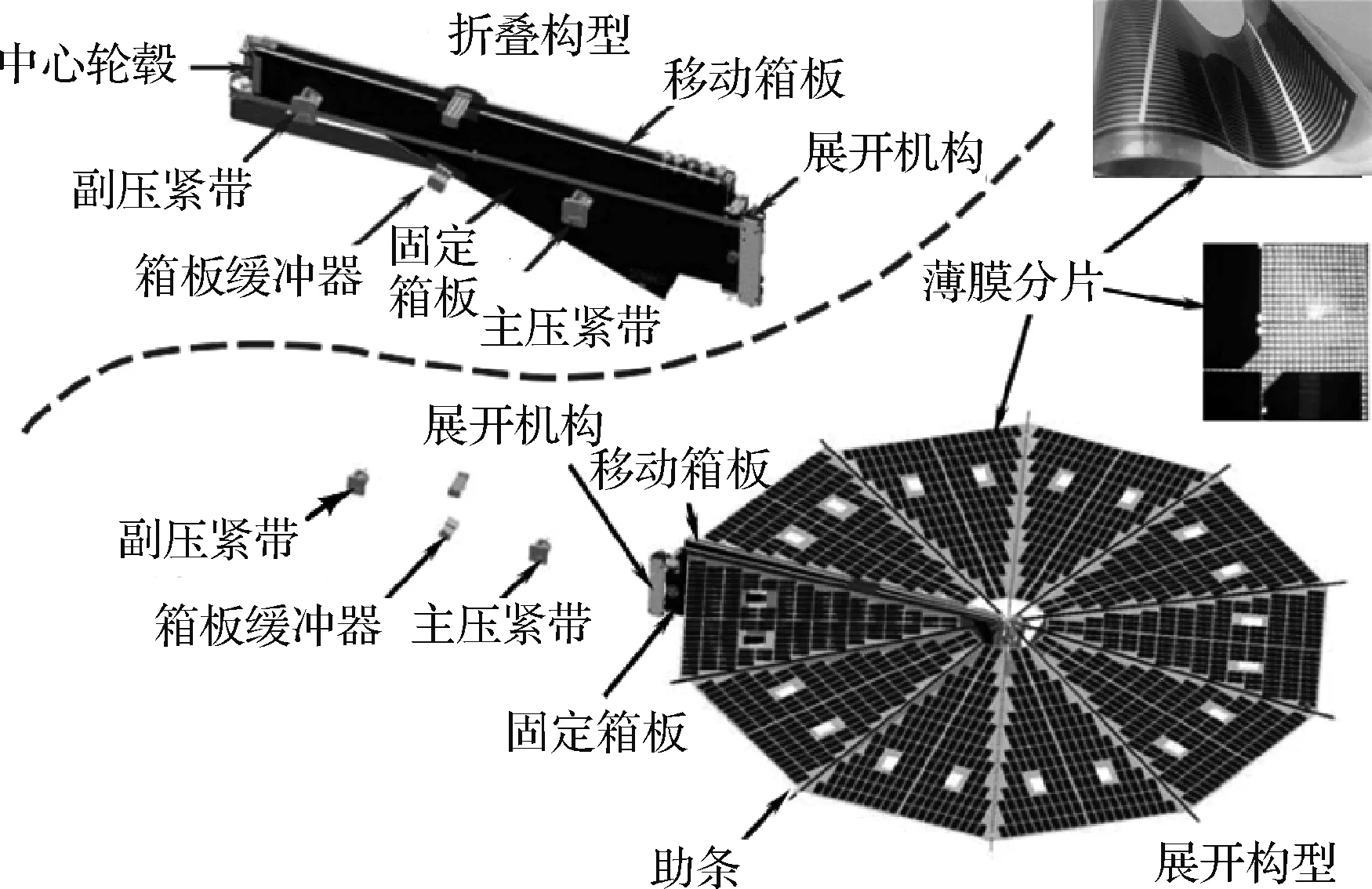
圖1 UltraFlex薄膜太陽翼構型Fig.1 UltraFlex solar array configuration
到目前為止,美國在UltraFlex的理論研究和工程應用領域領先于其他國家,成功發射入軌了多組UltraFlex太陽翼。ATK公司研制出的UltraFlex太陽翼工程樣機由10塊三角形的柔性薄膜基板組成,展開直徑約為3.1 m。1998年,ATK公司開始為火星01著陸器配套了兩個直徑為2.1 m的圓形太陽翼[3]。同樣尺寸的太陽翼后來在2007年發射的“鳳凰號”火星著陸器(Phoenix Mars Lander)以及2018年發射的“洞察號”火星探測器(InSight Mars Lander)上成功應用并順利展開。洞察號上的Ultra-Flex結構如圖2所示。從2008年開始,ATK公司研究為NASA研發的“獵戶座”多用途飛船服務艙配套UltraFlex太陽翼,太陽翼直徑增加到了6 m;2016年開始,ATK又為“天鵝座OA-5”飛船配套了2個直徑為3 m的UltraFlex太陽翼。
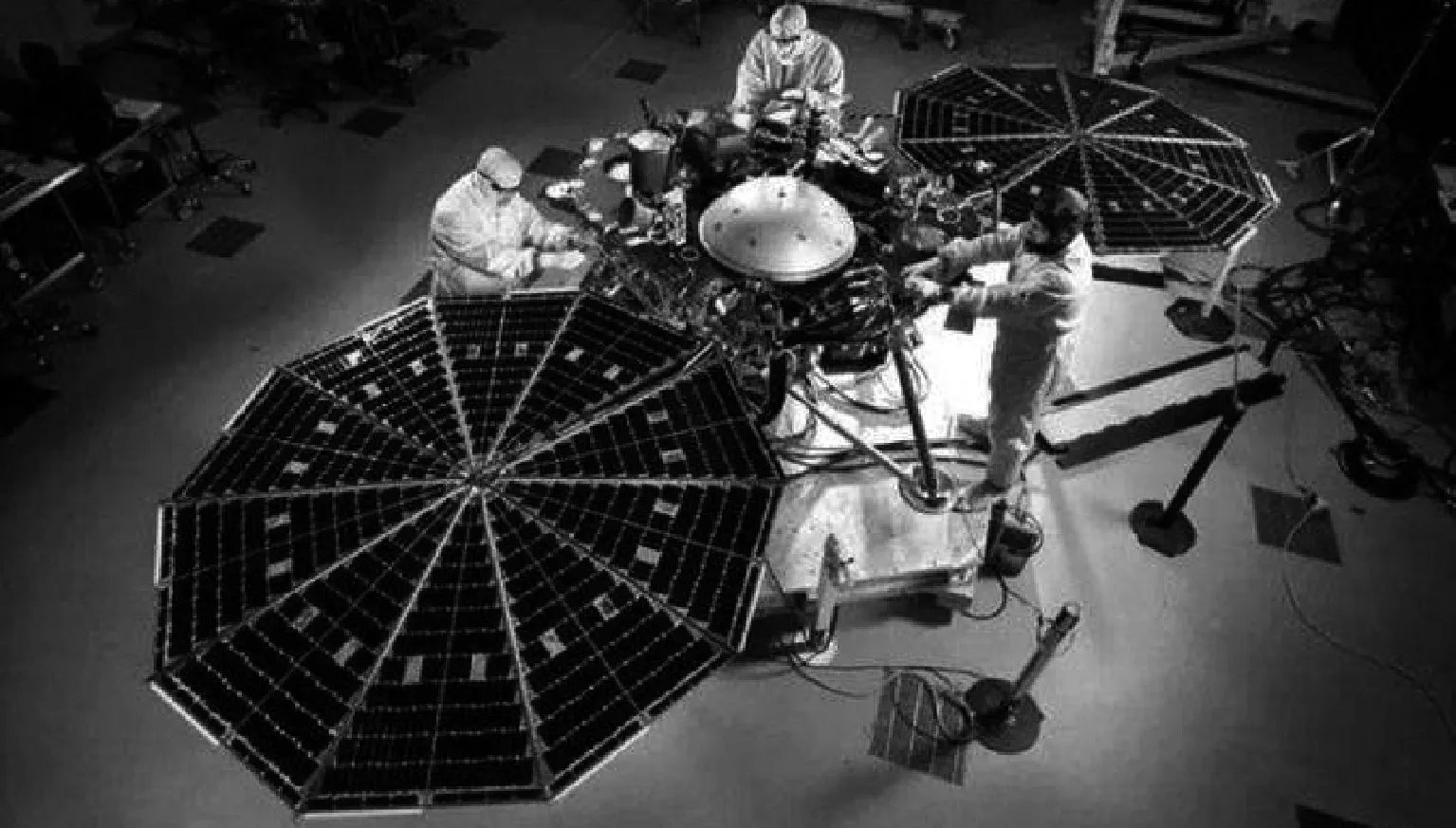
圖2 洞察號上的UltraFlex結構Fig.2 UltraFlex solar array on InSight Mars Lander
在實驗測試方面,2007年NASA利用單點激振以及激光測振儀在真空環境下對半徑為1.6 m的UltraFlex太陽翼縮比模型進行了模態測試。2010年,NASA利用單點激振以及加速度傳感器進行數據采集,對半徑為2.55 m的UltraFlex太陽翼樣機在真空環境和大氣環境下分別進行了模態測試。2013年,NASA利用有限元軟件ANSYS對UltraFlex進行模態分析[4],充分考慮到重力懸吊系統及空氣作用的影響,得到了超柔性太陽翼的前三階全局模態,仿真分析結果與樣機試驗結果及諧波響應分析結果吻合較好。UltraFlex太陽翼模態試驗如圖3所示。
目前從公開發表的文獻來看,理論分析多基于UltraFlex的簡化結構/替代模型,實驗分析多針對結構的模態特性。展開過程中UltraFlex的動力學特性分析相對較少。

圖3 UltraFlex太陽翼模態試驗Fig.3 Modal test of UltraFlex solar array
地面重力環境下的展開試驗與在軌微重力環境下的展開差異較大,地面試驗難以準確模擬[5],而采用空間實驗的方法在成本上難以承受;同時,UltraFlex太陽翼在研究中面臨實驗數據獲取困難,展開動力學試驗較難操作[6]。因此,采用數值模擬的方式完成UltraFlex展開動力學分析成為良好的解決方案。目前在太陽翼動力學特性分析領域,數值模型多采用混合坐標方法[7]或假設模態法[5],不能描述發生薄膜大運動與大變形相耦合的UltraFlex結構。傳統的太陽翼結構不含大面積薄膜[6-8],對薄膜間復雜的接觸碰撞問題尚需要建立高效的數值檢測模型[9]。再者,UltraFlex的展開過程中,不同時刻、構型下對應的系統負載不同,也給展開動力學準確仿真分析增加了困難[10-12]。
綜上,精確地完成UltraFlex太陽翼結構的數值模型搭建和有序展開動力學特性分析,能夠為結構設計與優化、展開控制提供重要參考,具有顯著的理論意義和實際工程價值。
1 UltraFlex動力學模型搭建
1.1 數值分析模型搭建方法
本文采用絕對坐標方法搭建UltraFlex系統動力學模型。絕對坐標方法包括描述剛體動力學的自然坐標法和描述柔性多體系統動力學的絕對節點坐標法(ANCF)。這兩種方法具有統一的動力學方程形式,可以形成對復雜航天器精確的剛柔耦合動力學分析方法。自然坐標法此處不再介紹,可參考文獻[13]中相關內容。
如圖4所示,一個ANCF全參數梁單元[14],其單元上任一點的全局位置矢量定義為:
r=Sbeam(x,y,z)e
(1)
式中:r為任一點P的全局位置矢量,x,y和z是點P的局部坐標,Sbeam為梁單元形函數。
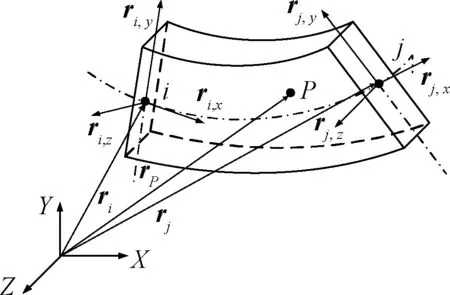
圖4 基于ANCF的全參數梁單元Fig.4 Full parameterization beam element based on ANCF
單元節點坐標e可以表示為
(2)
式中:r,x表示r對x的偏導數,依次類推。由式(2)可知,該單元任一節點坐標均包含一個位置矢量與三個斜率矢量,共計采用24個廣義坐標來描述。
與此類似,本文采用考慮Kirchhoff假設的縮減ANCF矩形薄板單元搭建大面積薄膜數值模型。如圖5所示,該單元類型略去了板沿厚度方向的變形,即節點廣義坐標不包含沿厚度方向的梯度向量,以A點為例,該點的節點廣義坐標為
(3)
每個單元包含4個節點,合計36個節點自由度。其他具體形函數形式等可參考文獻[15]。
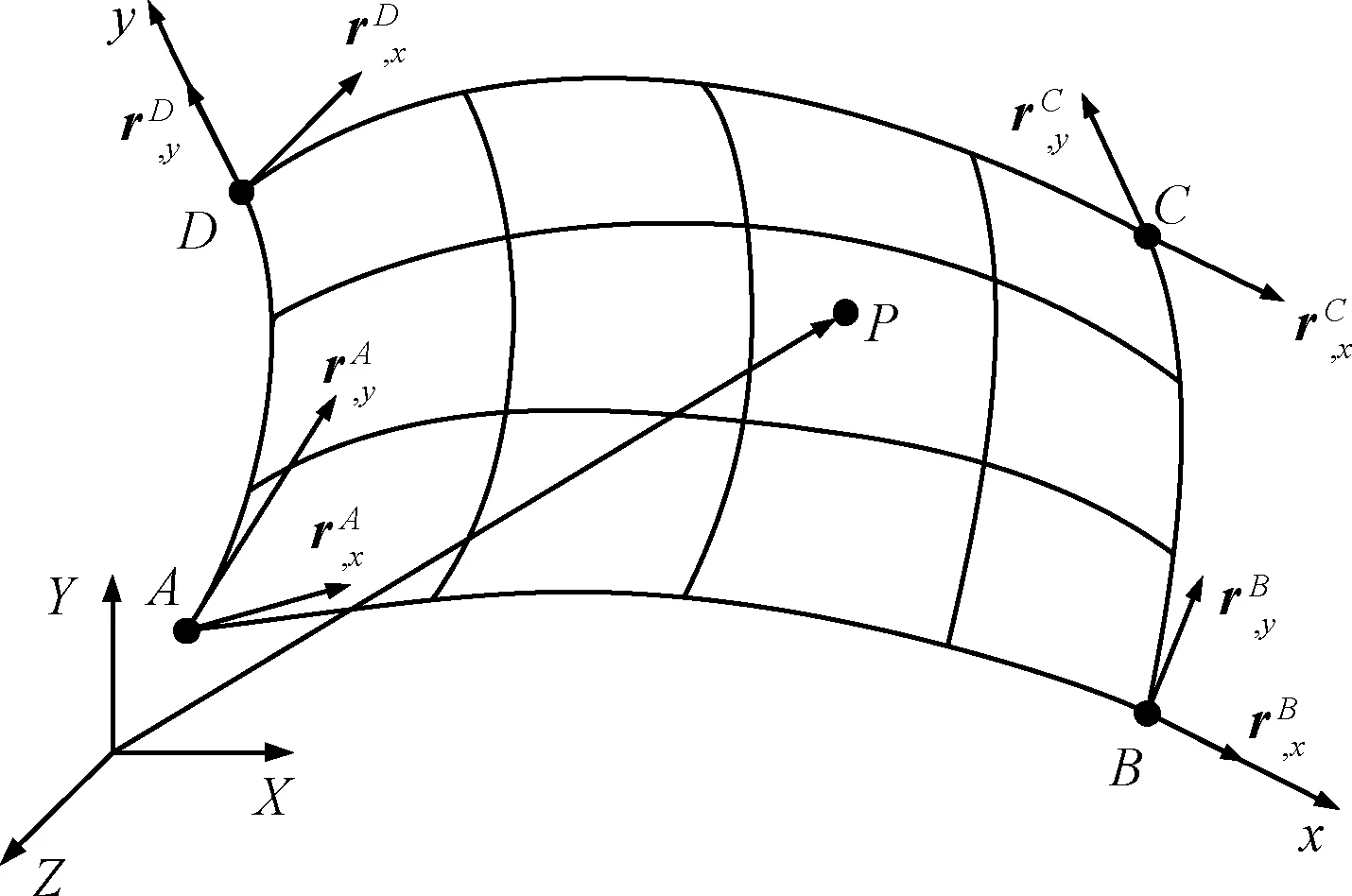
圖5 縮減ANCF矩形薄板單元Fig.5 Reduced rectangular thin plate element based on ANCF
如圖6所示搭建完整結構的動力學數值仿真模型,包含箱板結構、薄膜太陽翼片和肋條結構。基于絕對坐標方法,兩片箱板結構采用自然坐標法建模,UltraFlex肋條采用的ANCF梁單元進行建模,薄膜太陽翼片采用縮減ANCF薄板單元進行建模。
圖6 完整結構動力學仿真模型Fig.6 Dynamics simulation model of the complete structure
通過第一類拉格朗日方程,可以推導系統方程為:
(4)
式中:M為系統質量矩陣,q為系統廣義坐標,C為系統約束方程,Cq為系統約束方程對廣義坐標的雅克比矩陣,λ為拉格朗日乘子,Q(q)為系統廣義外力矩陣,F(q)為系統彈性力矩陣。本文中,采用廣義alpha方法求解該方程組[16]。
1.2 接觸碰撞檢測算法
UltraFlex展開過程中,薄膜分片間以及薄膜與肋條之間存在復雜的接觸碰撞現象。為了高效檢測薄膜間的接觸碰撞,將整個接觸檢測過程分為兩步執行,即全局檢測階段和局部檢測階段。在全局檢測中,基于層次包圍盒思想,按照父輩包圍盒包圍多個子輩包圍盒的原則,構造包圍盒樹狀層次結構,如圖7所示,快速匹配彼此靠近的四邊形接觸塊,形成潛在接觸對;在局部檢測中,通過檢測點與四邊形接觸塊之間的接觸,得到點與曲面間接觸的粗略碰撞信息,以此作為初值進行迭代,得到薄膜結構間的精確碰撞點。

圖7 層次包圍樹結構示意圖Fig.7 Demonstration of hierarchical bounding volumes
如圖8所示為兩個可能發生接觸的縮減ANCF薄板單元,通過全局檢測,已得到圖中兩個粗線條四邊形接觸塊(潛在測試對)在彼此靠近。此時需要在單元2上找到一點Q,使得接觸塊a上的接觸點P到Q的距離為點P到單元2的最短距離,一次判斷具體接觸情況。設Q在單元2上的局部坐標為(ξQ,ηQ),若點Q為單元2內一點,則有
(5)
式中:Splate為縮減薄板單元的形函數,rP為P點在全局坐標下的位置矢量,e2為單元2的廣義坐標。略去高階小量后,可以快速求解單元間的最短距離,進而獲得接觸點及接觸力信息。
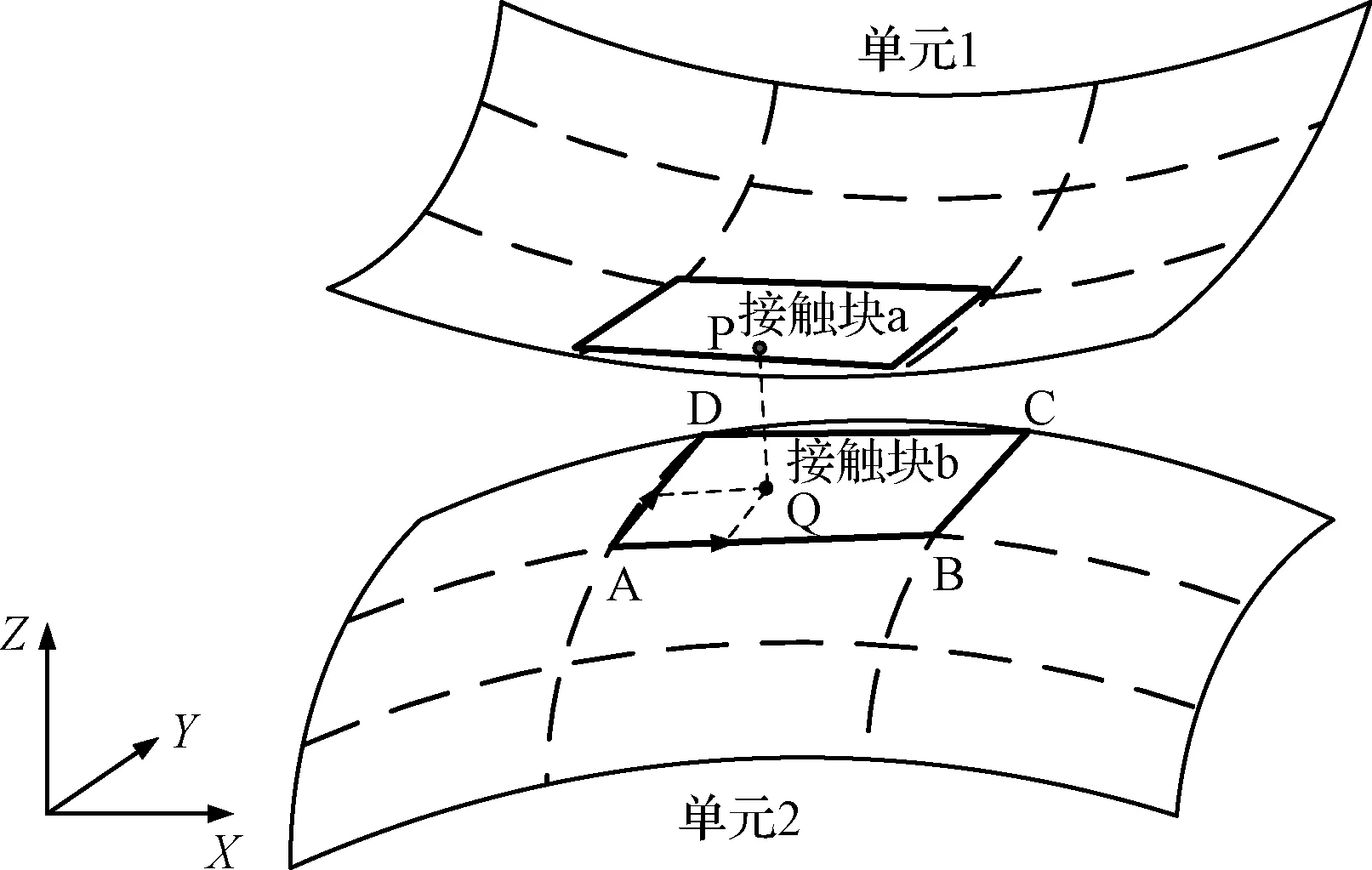
圖8 局部檢測示意圖Fig.8 Demonstration of local detection
1.3 UltraFlex展開過程定義
如圖9所示,UltraFlex在展開過程中,箱板由扭簧和繩索聯合驅動控制,固定箱板保持不動,移動箱板驅動展開,其余肋條由連接的薄膜分片提供牽引力。展開具體過程為:
1)在轉角為0~π階段,扭簧提供箱板轉動的動力,繩索控制轉動的速度。由于繩索只能提供拉力,若繩索松弛,則箱板的轉動不可控,因此要保證在這一過程中繩索一直處于受拉狀態。
2)在轉角在π附近時,扭簧提供的扭矩接近0,且機構的轉動通常有一定的阻力,箱板只能依靠慣性通過這一階段。因此,在轉角為π附近時,須確保箱板具有足夠的轉動速度。
3)在箱板剛轉過π時,扭簧提供相反的扭矩方向,如果繩索沒有及時提供拉力,箱板的轉動將減速甚至反向轉動,最后停在轉角為π的附近。若此時繩索瞬時啟動拉力,可能會出現無法拉動或者收攏的情況。
4)當轉角大于π時,此時靠繩索的拉力驅動箱板展開。

圖9 洞察號UltraFlex展開測試Fig.9 Deployment test of UltraFlex on Insight
因此,在展開過程中,需要保證繩索一直處于受拉狀態,且在過度階段有足夠的轉速,這樣才能夠對箱板的轉動實施控制并且順利通過轉角為π的時刻,最終整體結構展開。

圖10 繩索長度與轉角關系示意圖Fig.10 Deployment test of UltraFlex on Insight
如圖10所示,研究繩索長度隨UltraFlex展開的變化情況。繩索長度(2a長度)與轉角(2α)之間的關系表示為:
(6)
式中:tan(φ)=e/H,其中H為箱板的長度,e為箱板偏離轉動齒輪中心的距離,r為齒輪副單個齒輪的半徑。
依據以上關系,考察繩索長度最大的情況,即考察a最大的情況。由上式分析需要sin(α+φ)=1。因此得到a最大,α=π/2-φ,此時轉角θ=2α=π-2φ。可以看到,繩索最長時并非對應展開π角度。但實際中,由于e非常小,計算得到的φ非常小,繩索最長時θ≈π。
UltraFlex結構的展開是通過繩索控制轉動箱板的轉動速度,本文中定義繩索長度L隨時間t變化的關系為:
(7)
式中:tmax為展開過程中箱板端點距離達到最遠時的時間,tend為展開結束時的時間,l0為t=0時箱板端點距離;l1為箱板端點距離的最大值,l2為t=tend時箱板端點的距離。a1和b1由l0和l1決定,a2和b2由l1和l2決定。
結合圖10,本文設置展開過程參數為tmax=25 s,tend=50 s,H=2.1 m,e=0.03 m,r=0.06 m,l0=2(r-e),l1=2((H2+e2)1/2+r),l2=2(r+e),則得到繩長隨時間變化曲線如圖11所示,根據轉角與繩長之間的關系,可以得到轉角及轉速隨時間的變化曲線如圖12所示,可見在過度環節轉角最快,有利于成功展收。在仿真過程中通過改變tmax,tend可以得到不同的繩長控制策略。
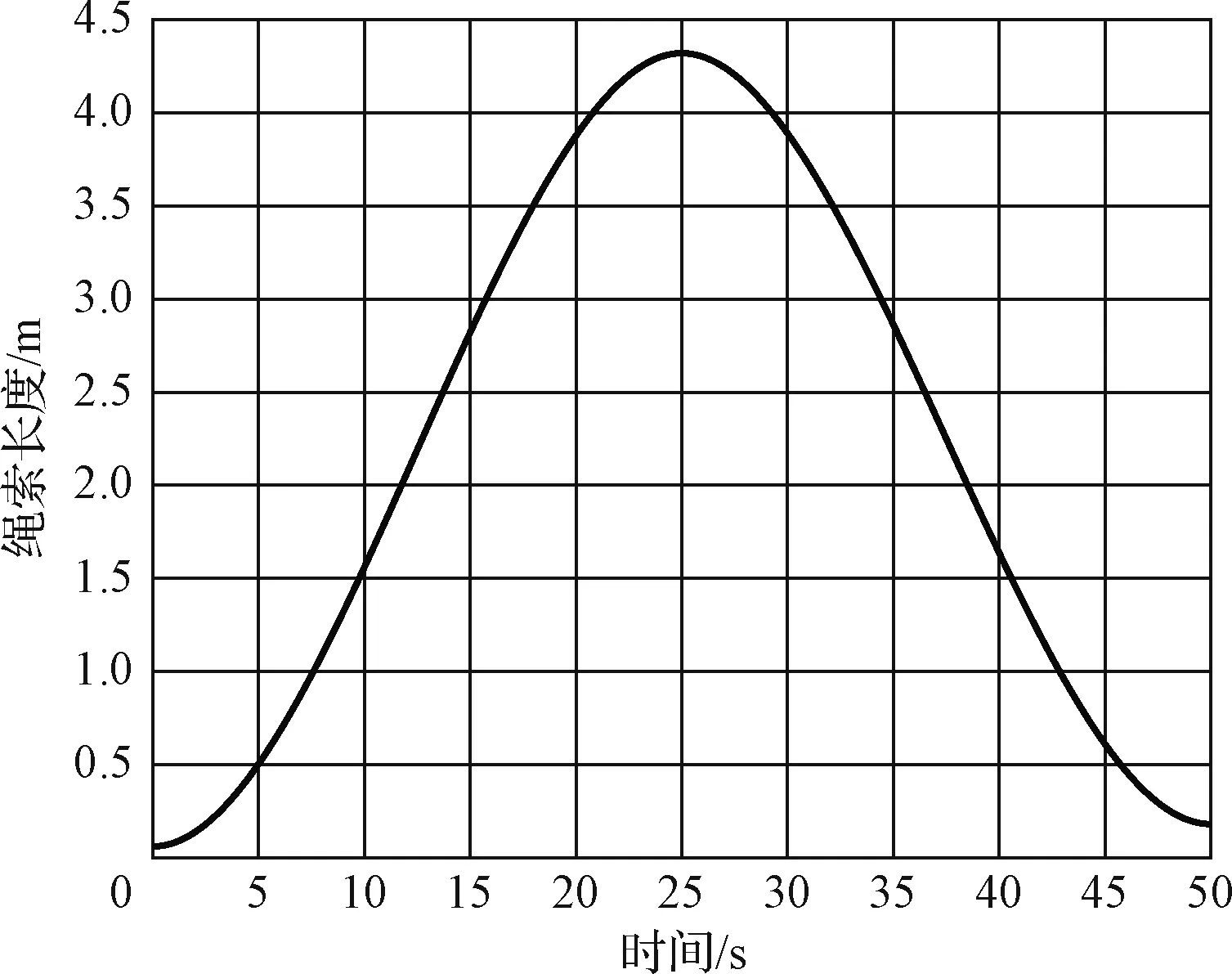
圖11 繩長隨時間變化曲線Fig.11 Time history of the designed rope length

圖12 轉角與轉速隨時間變化曲線Fig.12 Time history of the rotation angle and angular velocity
在仿真過程中,不建立繩索的實際模型,當箱板上繩索連接點距離大于或等于規劃的繩長時,認為繩子兩端分別與兩個箱板上的繩索連接點接觸,按照接觸力的算法計算繩索拉力,方向沿箱板特征點連線方向;當箱板特征點距離小于規劃繩長時,認為繩索拉力為零[17]。
扭簧對轉動箱板的驅動為扭矩作用[18],扭矩的大小隨著箱板轉過角度而變化,文中定義扭矩M隨轉角θ的變化關系為:
(8)
為了保證在無重力環境下展開機構打開時太陽翼薄膜分片能夠向下翻折,分析模型中在薄膜分片的折痕處和薄膜分片與柔性肋條的連接處均施加了使薄膜分片向下翻折的力矩。該力矩的大小為輸入參數,可以設置為一個小量,在展開過程中起促使翻折的作用。
2 UltraFlex有序展開動力學分析
UltraFlex仿真模型主要參考美國“鳳凰號”太陽翼測試樣機數據。系統內剛體包括箱板結構、短粗連接件機構等,數量為30;柔性肋條數目為15,彈性模量為70 GPA,泊松比為0.3,每根肋條長度為2.1 m,均劃分為45個ANCF梁單元;薄膜分片數量為16,每個分片薄膜共包含126個縮減ANCF薄板單元。系統總單元個數為2721,廣義坐標數量為89136。
NASA選用聚酰亞胺Kapton作為特種薄膜材料。該材料具有優良的化學穩定性、耐高溫性、堅韌性、耐磨性、阻燃性、電絕緣性等,目前廣泛應用于航空航天器領域[19]。基本材料參數如表1所示。

表1 薄膜材料參數Table 1 Parameters of membrane material
基于搭建的動力學仿真數值模型,應用式中的仿真參數,進行無重力環境下的UltraFlex展開過程動力學分析。求解得到UltraFlex展開過程構型如圖13所示,結果表明,所采用的繩索和扭簧共同驅動的展開方式能夠使結構有序展開。

圖13 展開過程演示Fig.13 Configuration of deployment process
繩索長度及箱板端點距離(繩索連接點距離)隨時間的變化曲線如圖14所示,兩條曲線吻合地很好,說明結構展開精度高,繩索長度按照預定設計變化,沒有出現較大的松動,因此不會與UltraFlex展開機構的其他部件發生纏繞。
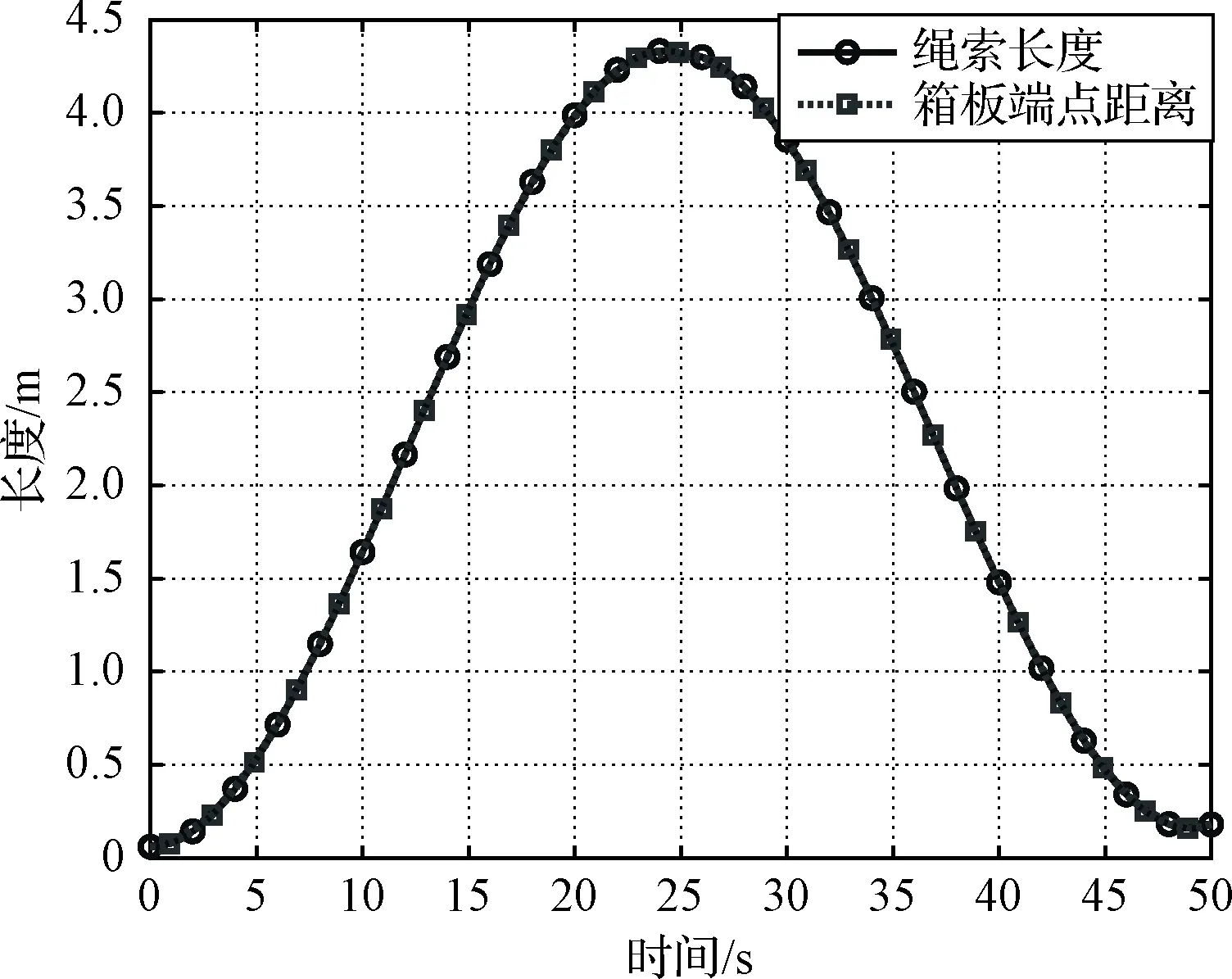
圖14 展開過程中繩索長度隨時間變化曲線Fig.14 Time history of the rope length during deployment
圖15為UltraFlex展開過程繩索拉力的變化曲線。在展開過程中,繩索均處于提供拉力狀態,即限位狀態;繩索拉力最大值出現在21.3 s,即過渡環節,最大值為62.5 N;整個展開過程,繩索拉力處于不斷震蕩狀態,表明箱板在展開過程中由于薄膜分片的不斷展開運動而出現震蕩現象;相比較展開的前半部分,后半部分的繩索拉力整體更大,反映了繩索不僅需要牽引結構展開,還需要克服扭簧的彈性力做功。

圖15 繩索拉力隨時間變化曲線Fig.15 Time history of the rope tension
圖16和圖17為UltraFlex展開過程中肋條間夾角的變化曲線,1~8號夾角靠近固定箱板,9~16號夾角靠近移動箱板。從圖中可以觀察到肋條展開次序并非為有序數列,這主要是由于薄膜運動的復雜性和非有序性造成的;展開過程中,夾角出現未出現超調現象,但出現回彈現象,顯示了薄膜結構的張緊和松弛過程[21];在展開結束階段,所有夾角趨于一致,顯示數值仿真的正確性。夾角曲線波動較大,說明肋條擺動的幅度較大,這是由于肋條收到薄膜分片突然的拉扯造成的。但是由于肋條和薄膜分片的擺動被限制在一定的運動范圍內,因此這并不影響整體結構的順利展開。

圖16 展開1~8號夾角隨時間變化曲線Fig.16 Time history of No.1~8 angles between ribs

圖17 展開9~16號夾角隨時間變化曲線Fig.17 Time history of No.9~16 angles between ribs
在展開初段,中心肋條與運動箱板之間的肋條發生接觸,表現出中心肋條推動其后肋條展開的特征,而位于中心肋條與固定箱板之間的肋條由于沒有受到薄膜分片的拉力而保持靜止。因此出現了在展開初段只有中心肋條處展開,而其他肋條仍處于收攏狀態的情況,如圖18(a)所示。隨著肋條間夾角的增大,太陽翼薄膜分片被完全拉開,如圖18(b)所示。此時,太陽翼薄膜分片傳遞拉力,導致了肋條突然被拉扯,使得展開過程不能像重力工況下展開那樣平穩有序。在展開鎖定后,太陽翼薄膜整體拉緊并有微小振動,最后穩定。
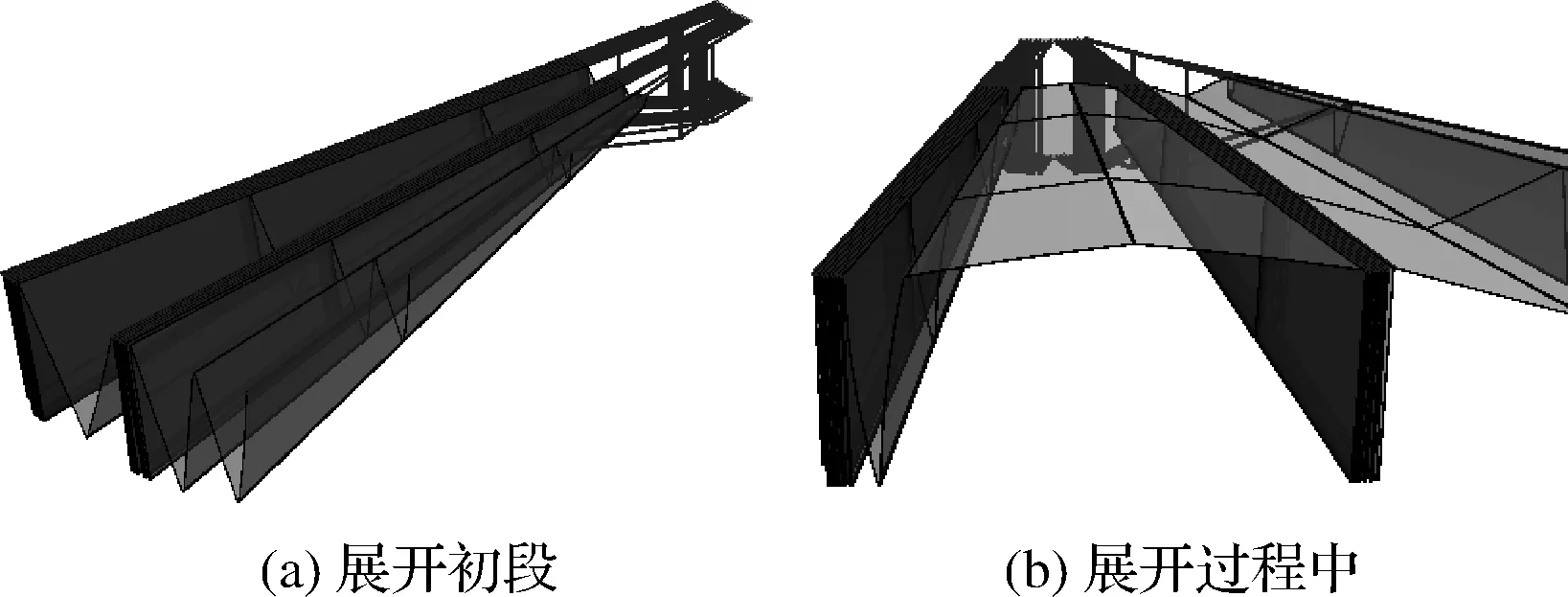
圖18 展開初段與展開過程中的薄膜構型Fig.18 Configurations of blankets during initial deployment and deploying phase
為檢驗模型的正確性,對系統展開過程進行了能量分析。UltraFlex由扭簧及繩索驅動約束驅動展開,驅動約束對應的約束力為驅動力,在展開過程中,驅動力做功,UltraFlex系統能量增加,由能量守恒可知,太陽翼系統增加的能量應等于驅動力所做的功。如圖19所示為展開過程中系統能量的變化,其中總能量等與應變能與動能之和減去驅動力所做的功。展開過程中,驅動力做的功轉換為UltraFlex太陽翼的動能和應變能,但總能量保持不變,驗證了搭建的數值模型的正確性。

圖19 能量變化曲線Fig.19 Time history of system energy changes
3 結 論
本文針對UltraFlex太陽翼結構數值建模困難、薄膜展開過程復雜的問題,進行了動力學建模、展開動力學分析研究,得到如下結論:
1) 采用絕對坐標方法搭建結構模型,利用兩步接觸檢測模型處理薄膜間的接觸問題,是對UltraFlex結構進行動力學研究的有效方法。應用該方法描述UltraFlex太陽翼的展開過程,可方便地分析繩索拉力、展開構型以及系統能量等動態特性。
2) 采用扭簧、繩索聯合驅動的策略能夠有序、穩定地展開UltraFlex太陽翼結構。通過仿真分析可知,合理地設計扭簧與繩索釋放速率,能夠使得繩索始終處于張緊狀態,為結構展開提供拉力作用。
3) 在展開過程中,薄膜分片運動復雜,薄膜間、薄膜與肋條間接觸碰撞頻繁,造成薄膜張緊-回彈現象交替出現,最終隨結構的整體展開而趨于穩定。