水田打漿機水平控制器設(shè)計與試驗
2020-04-16 12:55:39張震臧克江王冬孫悅
江蘇農(nóng)業(yè)科學 2020年4期
張震 臧克江 王冬 孫悅
摘要:針對現(xiàn)有水田打漿機水平控制系統(tǒng)在耕作時機械的傾斜和振動會導致耕整后的地表平整精度低、可控性差等問題,設(shè)計了以STM32為主控芯片的平地系統(tǒng)控制器。為了消除振動對控制效果的影響,設(shè)計了基于限幅遞推平均濾波的PID算法并進行試驗研究,試驗結(jié)果證明,限幅遞推平均濾波對傾角數(shù)據(jù)處理有效地抑制了系統(tǒng)干擾和機具振動干擾;再此之后并進行了田間試驗以證明本設(shè)計的水平控制系統(tǒng)明顯比現(xiàn)有的平地系統(tǒng)耕整后的田間土壤起伏波動小,以期達到較好的控制效果。
關(guān)鍵詞:水田打漿機;水平控制器;控制系統(tǒng);濾波器;限幅遞推平均濾波;PID算法;水田表面高程
中圖分類號: S222.5+1文獻標志碼: A
文章編號:1002-1302(2020)04-0235-05
收稿日期:2018-11-26
基金項目:佳木斯大學學生科技創(chuàng)新創(chuàng)業(yè)項目(編號:X2YF2018-15)。
作者簡介:張?震(1994—),男,黑龍江齊齊哈爾人,碩士研究生,主要從事機械工程、液氣壓傳動與控制技術(shù)研究。E-mail:1458516851@qq.com。
通信作者:臧克江,博士,教授,碩士研究生導師,主要從事液氣壓傳動與控制技術(shù)、現(xiàn)代設(shè)計方法、機械設(shè)計制造及自動化教學與研究。E-mail:kjzang@163.com。
隨著自動控制技術(shù)的發(fā)展,農(nóng)業(yè)自動化程度越來越高,水田地面平整機的控制系統(tǒng)亦多樣化發(fā)展[1]。打漿機作為平地方式的一種,采用先打漿再通過平地裝置將泥漿抹平的方式平整水田地面,以其成本低、效率高的特點被廣泛使用。李明金設(shè)計了水田打漿平地機[2];余水生設(shè)計了水田高茬秸稈還田耕整機[3];陳鑫研究了小型水田耕耙平地機等傳統(tǒng)平地機具,發(fā)現(xiàn)在耕作時無法根據(jù)田間復雜的地形狀況,對機具進行實時調(diào)整,平整精度有限[4]。為了提高水田的平整精度,萬松等設(shè)計了基于傳感技術(shù)的水田旋耕機平地系統(tǒng)[5];胡煉等設(shè)計了農(nóng)機具自動調(diào)平控制系統(tǒng)[6]。之后又出現(xiàn)了激光平地技術(shù),胡煉等設(shè)計了三點懸掛式1PJ-4.0型水田激光平地機[7];蘇焱等設(shè)計了JGP-2500型激光平地機[8],試驗結(jié)果表明,能有效提高田面平整精度。但經(jīng)研究,傳統(tǒng)平地機械雖造價便宜,但平整精度有限;現(xiàn)有的自動調(diào)平控制系統(tǒng)雖能滿足水稻種植的農(nóng)藝要求,但是不能達到高精度調(diào)平。而激光平整精度雖然高但配套設(shè)備多且造價昂貴,不宜推廣使用。為了提高打漿機作業(yè)質(zhì)量,實現(xiàn)打漿機自動調(diào)平控制,本研究設(shè)計了以STM32為主控芯片控制器,并采用了限幅遞推平均濾波的PID算法滿足平地要求。
1?水田打漿機水平控制器設(shè)計
1.1?硬件系統(tǒng)設(shè)計
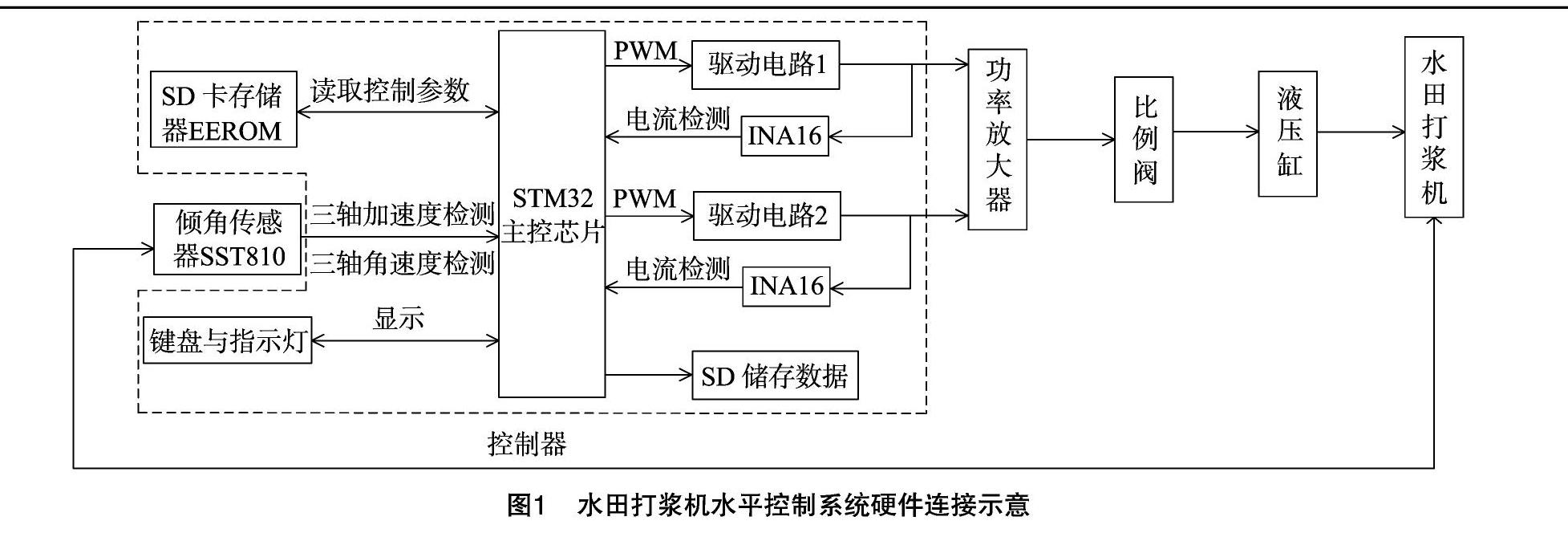
系統(tǒng)硬件結(jié)構(gòu)見圖1。系統(tǒng)的硬件包括STM32主控芯片、SST810傾角傳感器及SD卡存儲器(EEROM)等。STM32具有較高的性能和較低的動態(tài)功耗。從性能能上看,STM32 F103RCT6處理器可以作為本研究的融合算法以及控制算法的硬件實現(xiàn)。STM32主控芯片使用IIC總線接收來自SST810的數(shù)據(jù)并保存在SD卡存儲器。其采樣得到的三軸角速度和加速度計數(shù)據(jù)通過傳感器信息融合測量,從而得到平地鏟水平傾角;數(shù)碼管用于顯示當前測量角度和控制參數(shù)等,可通過按鍵改變顯示模式和參數(shù)調(diào)整,二者組成簡單的人機界面,易于調(diào)試。
1.2?濾波器設(shè)計
在傾角傳感器信號采集中,拖拉機與打漿機的振動都會干擾傳感器的數(shù)據(jù)采集,所以為了提高傾角傳感器的傾角信號采集精度,本研究應(yīng)用限幅遞推平均濾波算法技術(shù)對采集到的信號進行濾波處理。本研究濾波過程是對所測量的參數(shù)進行B次采樣(圖3),然后再計算當前采樣數(shù)據(jù)Si與前1次Si-1的差值,若超過設(shè)定的閾值A(chǔ),則用前1次Si-1代替本次采樣值;否則采用本次采樣值Si。將采樣的所有數(shù)據(jù)放進數(shù)組A[i]中,其中如果采樣值個數(shù)小于M,則繼續(xù)執(zhí)行數(shù)據(jù)采樣;否則進行數(shù)據(jù)隊列移動,把隊首的數(shù)據(jù)擠掉,將新采樣值放在數(shù)據(jù)隊尾,然后進行M個數(shù)據(jù)求均值,當N>Nmax(其中Nmax為原始數(shù)據(jù)隊列長度最大值與濾波參數(shù)差值)時,則濾波結(jié)束見圖2。
1.3?軟件設(shè)計
主程序流程見圖3。主程序是調(diào)平系統(tǒng)工作過程中的主要運行程序,從動態(tài)傾角傳感器SST810中讀取傳感器角度數(shù)據(jù),然后對數(shù)據(jù)進行限幅遞推平均濾波,之后再根據(jù)傾角數(shù)據(jù)作出調(diào)節(jié)。初始化完成后,進入調(diào)節(jié)程序,調(diào)節(jié)程序是一個死循環(huán),每個循環(huán)從讀取傾角數(shù)據(jù)R開始,讀取到傾角數(shù)據(jù)后判斷傾角R是否為0,若傾角R為0則不須要進行調(diào)節(jié),設(shè)置PWM波占空比為0。若傾角R不為0,則判斷傾角方向,若傾角R<0,設(shè)置M1_CW為高電平;若傾角R>0,則設(shè)置傾角M1_CW為低電平。方向設(shè)置完成后,須要設(shè)置電壓大小,即調(diào)節(jié)速度,由于是比例調(diào)節(jié),因此設(shè)置PWM波占空比為Kp×R,Kp是比例調(diào)節(jié)系數(shù)。一個循環(huán)結(jié)束,開始下一個循環(huán)。
2?濾波算法試驗研究
2.1?試驗過程
傾角傳感器信號采集中,振動干擾主要來源于正常工作的拖拉機與打漿機,試驗過程中為了保證采集數(shù)據(jù)的準確,必須保證拖拉機與打漿機正常工作(但是為了采集數(shù)據(jù)方便只須將拖拉機與打漿機原地啟動)。驗證試驗如下:(1)在打漿機上安裝水平控制系統(tǒng),并用平衡儀測量打漿機是否處于水平狀態(tài)(通過田間試驗發(fā)現(xiàn),由于土地平整度與打漿機質(zhì)量問題,打漿機常保持在0.15°左右,而無法保持在0°左右,所以本研究把打漿機保持在0.15°左右默認為水平狀態(tài)。);(2)開啟拖拉機與打漿機,將傳感器與計算機連接并采集數(shù)據(jù)(采集時間為10 s,0.05 s采集1次,共采集200次);(3)計算機運行Matlab融合程序?qū)Σ杉臄?shù)據(jù)進行處理。濾波算法試驗現(xiàn)場見圖4,可以看出拖拉機與打漿機處于水平狀態(tài)。
2.2?試驗分析
拖拉機與打漿機正常啟動原始傾角數(shù)據(jù)狀態(tài)見圖5,該圖中的曲線是由機具處于水平狀態(tài)(0.15°)時采集到的原始傾角數(shù)據(jù)繪制而成的(圖中縱坐標為機具實時的傾斜角度,橫坐標為采樣時間)。從圖5可以看出,水平狀態(tài)下曲線的變化趨勢以及幅值變化,如果將未濾波的數(shù)據(jù)直接用于機具調(diào)平控制,會嚴重影響打漿機正常工作。
融合濾波算法后的傾角數(shù)據(jù)曲線見圖6(圖中縱坐標為機具實時的傾斜角度,橫坐標為采樣時間)。原始數(shù)據(jù)曲線經(jīng)過濾波處理后,曲線都變得比較平滑(未產(chǎn)生圖4中角度大幅度跳動的情況),誤差值在0.15° 附近跳動,經(jīng)過試驗驗證,濾波算法對傾角數(shù)據(jù)處理有效地抑制了系統(tǒng)干擾和機具振動干擾。
3?田間試驗
3.1?試驗過程
3.1.1?水田準備?用圓盤耙將水田耕整1遍,然后淹水泡3 d。
3.1.2?田間試驗?用全站儀測量水田的地理位置信息并記錄數(shù)據(jù);計算水田的平均高程,并以該高程作為水田平整的參考相對高程;運用現(xiàn)有的控制系統(tǒng)與打漿機配套使用進行平整水田作業(yè);水田平整完后,利用全站儀測量平整過后水田并記錄數(shù)據(jù)。然后運用本研究設(shè)計的控制系統(tǒng)與打漿機配套使用再進行平整水田作業(yè);水田平整完后,利用全站儀測量平整過后水田并記錄數(shù)據(jù)。
3.1.3?數(shù)據(jù)處理與分析?運用Matlab軟件對試驗前后采集到的數(shù)據(jù)進行處理,計算出耕整平地后田地的平整度。運用griddata()函數(shù)的差值原理進行曲面擬合生成三維地形圖,觀察2次耕整平地后水田地形圖的地貌起伏情況,評估平地效果。觀察平整前后水田地形的變化情況,計算出平整前后水田的平均高程和平整度Sd,評估平地效果。平整度一般可采用田塊內(nèi)所有測點處地面相對高程的標準偏差值Sd來定量描述。
Sd=∑ni=1(hi-h)2/n-1。(1)
式中:hi為田間的第i個采樣點的相對高程,cm;h為該田間相對期望高程,cm;n為田塊內(nèi)所有采樣點的數(shù)量。
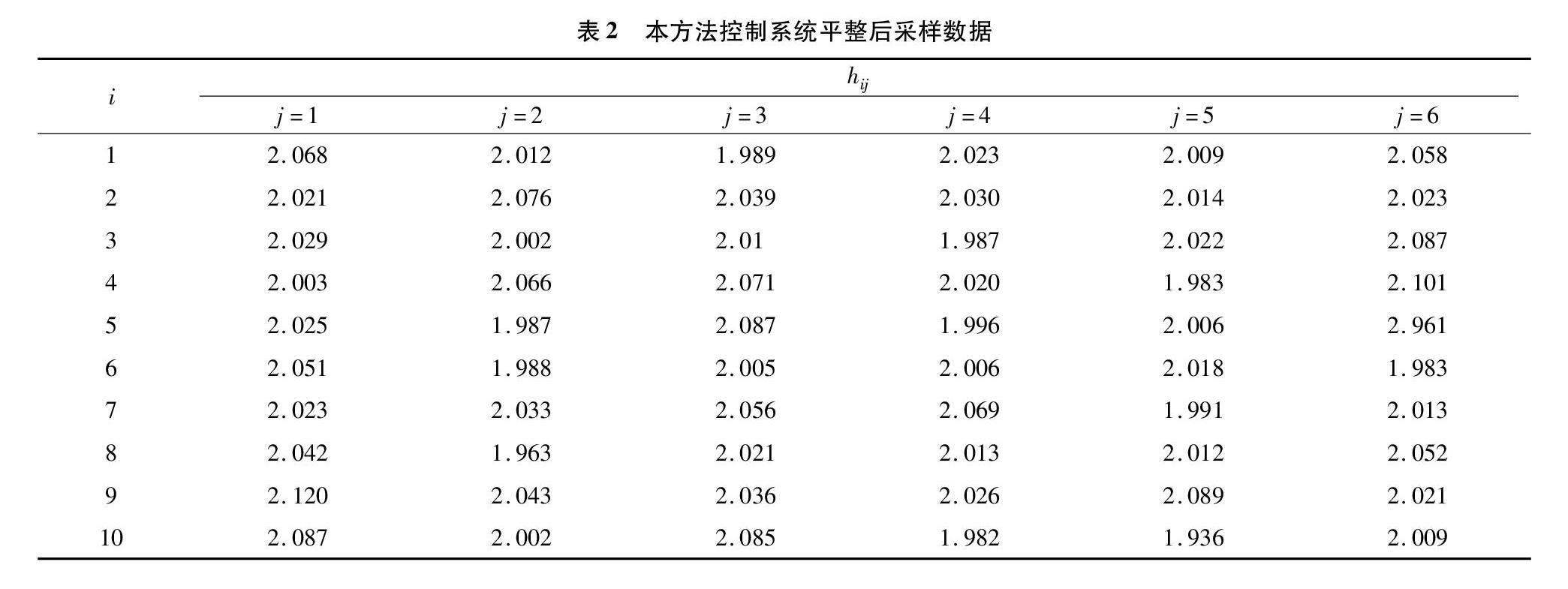
現(xiàn)有的控制系統(tǒng)平整后采樣數(shù)據(jù)見表1,本研究設(shè)計的控制系統(tǒng)平整后采樣數(shù)據(jù)見表2。其中,水田的面積為長50 m、寬30 m,采樣間隔為5 m,采樣點為60個。
3.2?試驗分析
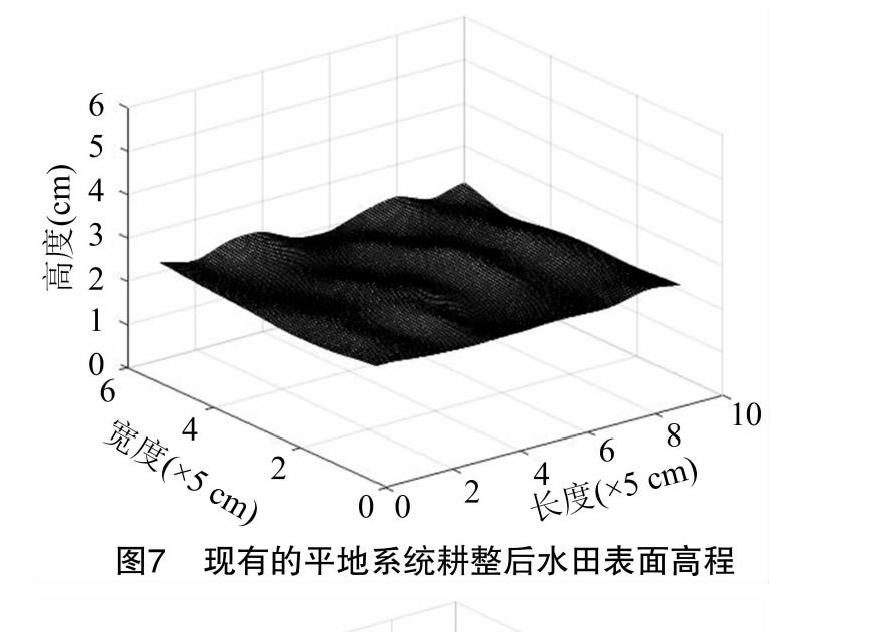
(根據(jù)土地實際尺寸縮小5倍)分別為現(xiàn)有的平地系統(tǒng)(圖7)和本研究設(shè)計的平地系統(tǒng)田間試驗后(圖8),用Matlab對采集的數(shù)據(jù)進行曲面擬合模擬的地形。由模擬的地形圖可知,本研究設(shè)計的平地系統(tǒng)耕整后的田面相比現(xiàn)有的平地系統(tǒng)較為平整,田面起伏波動小。由平均相對高程可知,本研究設(shè)計的平地系統(tǒng)比現(xiàn)有的平地系統(tǒng)減小了0.081 cm,由平整度結(jié)果分析可得現(xiàn)有的平地系統(tǒng)試驗后的平整度2.52 cm(平整度不超過3 cm),本研究設(shè)計的平地系統(tǒng)試驗后的平整度為2.13 cm,滿足平整精度要求,平整度明顯比現(xiàn)有的平地系統(tǒng)小,平整效果好。因此,本研究設(shè)計的平地系統(tǒng)耕整后的平地精度與現(xiàn)有的平地系統(tǒng)相比,有明顯的提高。
4?結(jié)束語
為滿足水稻種植的農(nóng)藝要求,筆者設(shè)計了水田打漿機水平控制系統(tǒng)。通過試驗可知,該系統(tǒng)所使用的濾波技術(shù)能有效減小振動對傳感器的影響,并可通過按鍵改變顯示模式和參數(shù)調(diào)整實現(xiàn)簡單的人機界面。由田間試驗可知,本研究設(shè)計的水平控制系統(tǒng)明顯比現(xiàn)有的平地系統(tǒng)耕整后田間的土壤起伏波動小。但是控制系統(tǒng)的超調(diào)效果仍存在問題,并在田間試驗時發(fā)現(xiàn)當農(nóng)機具轉(zhuǎn)彎時,調(diào)平控制系統(tǒng)會出現(xiàn)不工作狀態(tài)等問題,還須進一步研究改進。
參考文獻:
[1]李益農(nóng),許?迪,李福祥. 田面平整精度對畦灌性能和作物產(chǎn)量影響的試驗研究[J]. 水利學報,2000(12):82-87.
[2]李明金. 水田攪漿機平地裝置的設(shè)計與試驗研究[D]. 大慶:黑龍江八一農(nóng)墾大學,2014.
[3]余水生. 水田高茬秸稈還田耕整機的研制[D]. 武漢:華中農(nóng)業(yè)大學,2012.
[4]陳?鑫. 小型水田耕耙平地機關(guān)鍵部件設(shè)計與建模[J]. 農(nóng)機使用與維修,2011(2):23-25.
[5]萬?松,陳子林,展鵬程,等. 基于傳感技術(shù)的水田旋耕機平地系統(tǒng)的設(shè)計與試驗[J]. 華中農(nóng)業(yè)大學學報,2016,35(4):129-135.
[6]胡?煉,林潮興,羅錫文,等. 農(nóng)機具自動調(diào)平控制系統(tǒng)設(shè)計與試驗[J]. 農(nóng)業(yè)工程學報,2015,31(8):15-20.
[7]胡?煉,羅錫文,林潮興,等. 1PJ-4.0型水田激光平地機設(shè)計與試驗[J]. 農(nóng)業(yè)機械學報,2014,45(4):146-151.
[8]蘇?焱,王永輝. JGP-2500型激光平地機工作機理研究[J]. 農(nóng)業(yè)科技與裝備,2012(6):36-37.