七自由度登高平臺的逆運動學求解
2020-04-20 11:09:57吳靜遠許沛森暢遠
中國科技縱橫 2020年1期
吳靜遠 許沛森 暢遠
摘 要:針對七自由度登高救援平臺機械臂,介紹了一種基于雅可比矩陣偽逆的逆運動學求解方法:綜合速度加權最小范數法與阻尼最小二乘法,實現冗余自由度機械臂運動過程中規避關節限位,保證奇異位置附近求解穩定性的要求。同時在該算法中引入閉環理念,保證較小的求解誤差。
關鍵詞:七自由度冗余機械臂;偽逆;加權最小范數法;阻尼最小二乘法
中圖分類號:TP242.6 文獻標識碼:A 文章編號:1671-2064(2020)01-0216-02
1 建立臂架的正運動學方程
1.1 齊次變換矩陣的建立
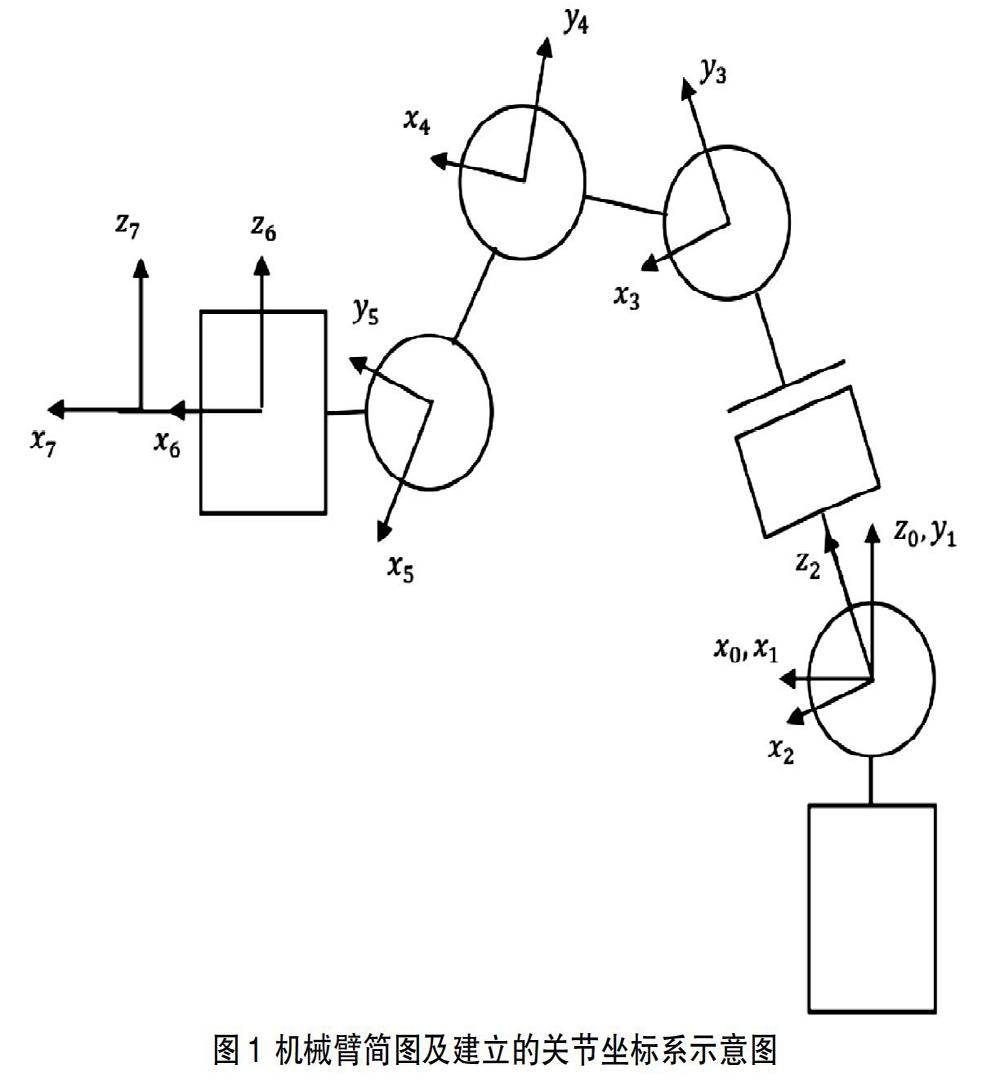
臂架的正運動學方程采用D-H參數法獲得。首先,在各個關節上定義D-H坐標系,描述當前各關節的空間姿態,利用齊次變換矩陣可獲得相鄰臂架的位姿關系,最后得到每個關節相對于基坐標系的空間位姿變換。
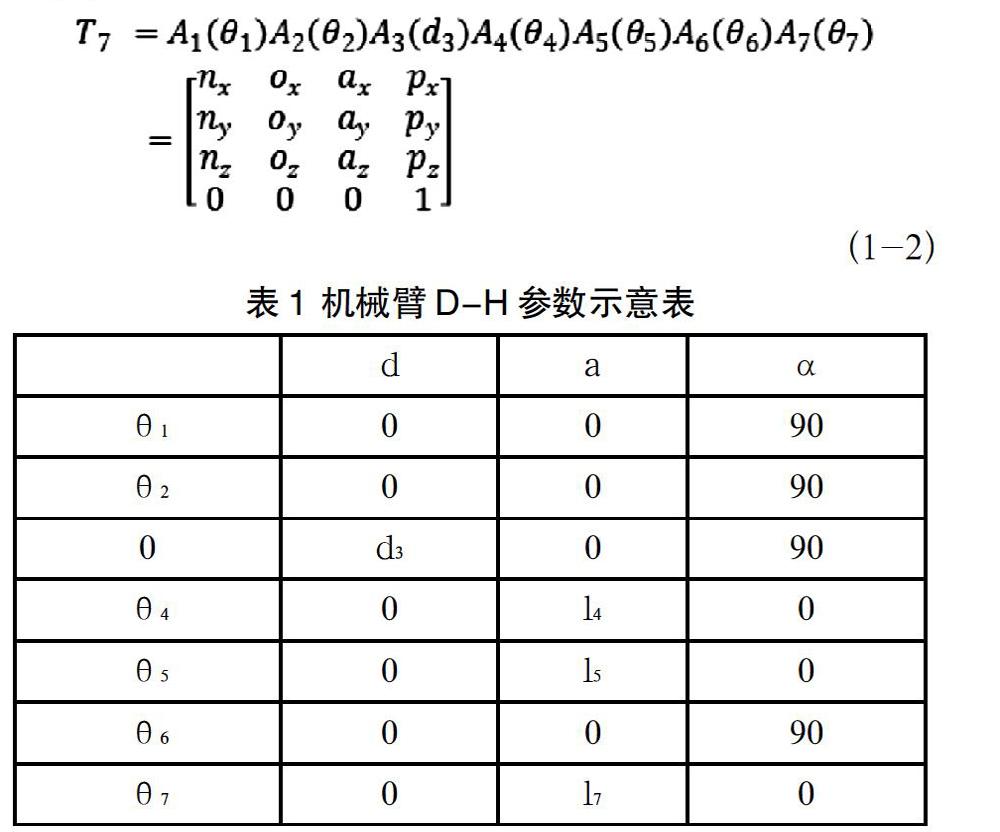
參考機械臂架構,對各部件按照連接方式進行簡化。臂架標號從原點到末端載人平臺為0,1,2…7,簡化模型如圖1所示,D-H參數見表1所示。
采用D-H法對機械臂進行運動學建模,第i個連桿對第i-1個連桿的坐標齊次變換矩陣如式(1-1)所示:
(1-1)由此得到該七自由度機械臂的正運動學模型如式(1-2)所示:
1.2 雅可比矩陣的建立
本文采用微分變換法計算機械臂的雅可比矩陣[1]。
隨著關節變量接近極限值,O(h)的值增加,在關節變量到達極限值時為無窮大,當在關節限制范圍內運行時,幾乎為0,當關節變量靠近極限值時其值為無窮。
當關節變量向限位值變化時,權重系數逐漸增大,關節運動速度減小,當關節變量趨向極限值時,權重系數趨向于無窮大,關節運動幾乎停止。
3 結語
本文介紹了一種基于雅可比矩陣偽逆結合了加權最小范數法,最小阻尼二乘法的閉環逆運動學求解算法。該算法通過加權最小范數法實現了規避關節限位,通過阻尼最小二乘法保證了在奇異位置的求解穩定性。該算法的閉環結構確保誤差較小且具有收斂性。
參考文獻
[1] 梁西昌.救援機器人冗余液壓機械臂運動學分析及軌跡跟蹤控制方法研究[D].山東:山東大學機械工程學院,2018:60.
