一種欠驅動末端執行器控制系統的設計
2020-04-21 07:40:59林凌張平均
數字技術與應用 2020年1期
關鍵詞:設計
林凌 張平均


摘要:本文根據仿生機理設計了一款欠驅動末端執行器,分析了欠驅動末端執行器的運動學坐標并給出了運動學模型。欠驅動末端執行器采用直流5V電源供電,并給出了該系統設計的硬件電路圖和軟件流程圖。
關鍵詞:欠驅動;末端執行器;設計
中圖分類號:TP241 文獻標識碼:A 文章編號:1007-9416(2020)01-0160-01
0 引言
當前市場主流已有的末端執行器主要有兩種結構形式,傳統模式主要包括了各類桿件機構欠驅動機械模塊組成,而近年來集中研究的熱點則是較為靈便的腱傳動欠驅動機械驅動模塊[1,2]。腱傳動欠驅動形式比較好地利用仿生生物機理(如圖1所示),模擬并實現了靈長類手臂手指的肌體傳動能力,本文將按此機理設計開發一款驅動末端抓取器,實現仿生機構的抓取[3]。
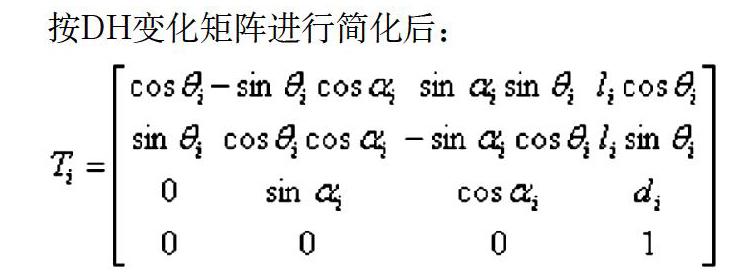
1 欠驅動末端執行器DH運動學模型
欠驅動末端執行器DH運動學坐標系如圖2所示[4]。
構件1的關節角為θ1,對應的關節長度為L1,構件2的關節角為θ2,對應的關節長度為L2。
按DH變化矩陣進行簡化后:
2 欠驅動末端抓取器控制系統設計
欠驅動末端執行器控制模塊圖3所示,欠驅動末端執行器控制面板圖4所示。
控制模塊與欠驅動執行器的電機機組由DC5V電源供電,控制模塊與電機機組連接,ESP8266Wi-Fi模塊與控制模塊通過串口進行通訊,并由控制模塊提供電源,其作用用于接收Wi-Fi中傳遞的來自PC端的控制信號,接通電源口模塊即為運行狀態,關閉電源后接收停止[5,6]。
3 結語
本文根據仿生機理,設計了一款欠驅動末端執行器,分析了欠驅動末端執行器的運動學坐標并給出了運動學模型。欠驅動末端執行器采用直流5V電源供電,并給出了該系統設計的硬件電路圖和軟件流程圖。
參考文獻
[1] 孫學儉,于國輝,周文喬,等.對世界工業機器人發展特點的分析[J].機器人技術與應用,2002(03):8-9.
[2] 蔡自興.機器人學[M].北京:清華大學出版社,2009.
[3] 李明.機器人[M].上海:上海科學技術出版社,2011.
[4] 張元興.自適應欠驅動手指機構研究[D].衡陽:南華大學,2014.
[5] 何艷濤.一種繩驅式欠驅動三指靈巧手的研究[D].哈爾濱:哈爾濱工業大學,2014.
[6] 蔣亞飛.三自由度機械手控制系統的設計與實現[D].廣州:廣東工業大學,2016.
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
