一種衛(wèi)星雙向時(shí)間同步系統(tǒng)故障定位方法
2020-04-23 13:38:28王茂磊王棋萍劉魁星
無線電工程 2020年5期
王茂磊,王棋萍,劉魁星
(1.中科院上海天文臺,上海 200030;2.北京衛(wèi)星導(dǎo)航中心,北京 100094)
0 引言
隨著科學(xué)技術(shù)的發(fā)展,各類大型甚至巨型復(fù)雜電子信息系統(tǒng)的建設(shè)與應(yīng)用層出不窮,其中一些系統(tǒng)出于精密測量與控制等需求(如衛(wèi)星導(dǎo)航、國際時(shí)間比對等領(lǐng)域),要求系統(tǒng)之間實(shí)現(xiàn)高精度時(shí)間同步。高精度時(shí)間同步的前提是進(jìn)行精密時(shí)間比對,時(shí)間比對的基本含義是通過某種方法或者手段獲得2個(gè)時(shí)間參考點(diǎn)之間差值的過程。
時(shí)間比對的基本方法有多種,根據(jù)測量方式的不同,時(shí)間比對技術(shù)大致可劃分為有線和無線兩大類[1]。有線條件下的時(shí)間比對技術(shù)一般基于測量儀器進(jìn)行時(shí)間間隔測量,主要應(yīng)用于系統(tǒng)內(nèi)部測量和時(shí)間同步。無線條件下的時(shí)間比對技術(shù)主要有GNSS共視時(shí)間比對、PPP精密時(shí)間比對和衛(wèi)星雙向時(shí)間比對等[2]。其中,衛(wèi)星雙向時(shí)間比對是公認(rèn)精度最高的一種方法,具有測量精度與測站距離不相關(guān)、可同時(shí)進(jìn)行測量數(shù)據(jù)交互等優(yōu)點(diǎn),在大型復(fù)雜、廣域部署和工作實(shí)時(shí)性強(qiáng)的系統(tǒng)中得到了廣泛應(yīng)用[3]。
本文針對某衛(wèi)星時(shí)間同步系統(tǒng)實(shí)際運(yùn)行中出現(xiàn)的問題,從衛(wèi)星雙向時(shí)間比對的基本原理出發(fā),分析了零基線條件下因觀測鏈路的對稱性進(jìn)一步加強(qiáng),衛(wèi)星雙向比對方程將退化為系統(tǒng)觀測量、鐘差和設(shè)備時(shí)延三者之間的關(guān)系。其中,系統(tǒng)觀測量和鐘差為已知量,因此可以準(zhǔn)確測得設(shè)備組合時(shí)延,在3站條件下設(shè)備組合時(shí)延閉合差也將趨于零。通過各類不同測試場景對設(shè)備時(shí)延進(jìn)行多次測量時(shí),若某一站設(shè)備存在問題,將會出現(xiàn)無法閉合的情況,此時(shí)可通過分析3個(gè)組合時(shí)延變化情況直接定位故障站設(shè)備。以此為基礎(chǔ),開展了相關(guān)試驗(yàn),驗(yàn)證了該方法的可行性。
1 衛(wèi)星雙向時(shí)間比對原理
衛(wèi)星雙向時(shí)間比對基于衛(wèi)星雙向時(shí)間頻率傳遞 (Two-way Satellite Time and Frequency Transfer,TWSTFT)技術(shù),基本原理是2個(gè)地面觀測站分別通過衛(wèi)星測量對方信號到達(dá)本地的時(shí)刻與本地時(shí)刻之間的時(shí)間偏差,再將各自得到的時(shí)間差相減,即可獲得2個(gè)地面觀測站的鐘差[4],其原理如圖1所示。
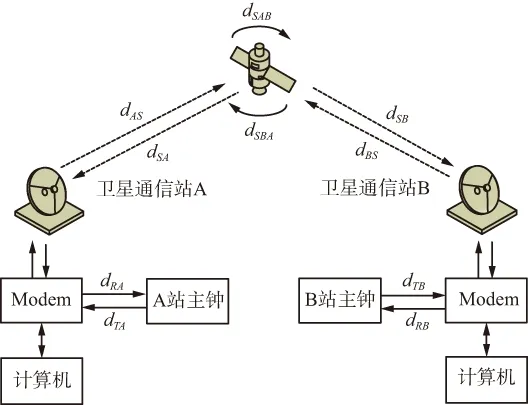
圖1 衛(wèi)星雙向時(shí)間比對原理
由圖1可以看出,Modem是專用于時(shí)間傳輸?shù)恼{(diào)制解調(diào)器,可以將原子鐘時(shí)間信號變換為適合衛(wèi)星傳輸?shù)膫坞S機(jī)碼擴(kuò)頻信號,反之亦然。衛(wèi)星雙向時(shí)間同步系統(tǒng)可完成2站之間的雙向比對,也可以在多站之間進(jìn)行雙向比對。
衛(wèi)星雙向時(shí)間比對的計(jì)算模型[1]為:
(1)
式中,TA,TB為兩地Modem中計(jì)數(shù)器讀數(shù);dAS,dSA,dBS,dSB為兩地對應(yīng)的上、下行路徑中的空間傳播時(shí)延;dSAB,dSBA為兩地對應(yīng)的上、下行路徑中衛(wèi)星的轉(zhuǎn)發(fā)器時(shí)延;dTA,dRB,dTB,dRA為兩地的地面站設(shè)備時(shí)延;SAS,SSA,SBS,SSB為兩地對應(yīng)的上、下行路徑中的Sagnac效應(yīng)時(shí)延。
空間傳播時(shí)延包括3部分:幾何路徑時(shí)延、電離層時(shí)延和對流層時(shí)延。
由地球自轉(zhuǎn)引起的Sagnac效應(yīng)時(shí)延,計(jì)算表達(dá)式為:
(2)
式中,ω為地球自轉(zhuǎn)角速度;Ap為地面站、衛(wèi)星和地心所構(gòu)成的三角形在赤道面上的投影面積;c為光速。
在衛(wèi)星雙向時(shí)間比對過程中,由于信號傳播路徑的近似對稱性,路徑的影響原則上大部分被抵消,但由于站點(diǎn)布設(shè)空間幾何分布、設(shè)備自身因素等原因,仍然有一部分非對稱的因素影響了衛(wèi)星雙向時(shí)間比對的精度,主要包括:① 與衛(wèi)星有關(guān)的誤差,主要包含衛(wèi)星運(yùn)動引起的誤差和衛(wèi)星轉(zhuǎn)發(fā)器不穩(wěn)定的誤差[5];② 信號傳播路徑上的誤差,主要是由于信號上下行頻率不同引起,包括對流層和電離層2個(gè)方面[6];③ 與地面站有關(guān)的誤差,主要包括設(shè)備誤差的影響7];④ 地球自轉(zhuǎn)引起的Sagnac效應(yīng)[8]。
2 某衛(wèi)星雙向時(shí)間同步系統(tǒng)故障問題描述
某站間時(shí)間同步系統(tǒng)建設(shè)過程中,基于某地球靜止軌道衛(wèi)星(GEO)在同一場區(qū)內(nèi)建立了3站時(shí)間同步系統(tǒng),如圖2所示。

圖2 某站間時(shí)間同步系統(tǒng)構(gòu)成
該系統(tǒng)中,A,B,C站均布設(shè)在同一場區(qū),相互距離不超過100 m,每個(gè)系統(tǒng)均配置原子鐘的時(shí)頻系統(tǒng)。3站時(shí)間可兩兩之間進(jìn)行時(shí)間比對,因此可以測得3站之間的相互鐘差分別為ΔTAB,ΔTAC,ΔTBC,理論上3站鐘差的和(可稱之為閉合差)應(yīng)為0。
實(shí)際進(jìn)行3站間的站間同步處理過程中,發(fā)現(xiàn)3站間的站間鐘差閉合結(jié)果存在隨機(jī)性跳變,即在某些時(shí)間段內(nèi)可以閉合(閉合值接近于0),而在某些時(shí)間段內(nèi)則不能閉合(閉合值在100 ns左右)。一些典型結(jié)果分別如圖3和圖4所示。

圖3 3站站間時(shí)間同步閉合差正常結(jié)果

圖4 三站站間時(shí)間同步設(shè)備閉合差異常結(jié)果
3 故障診斷原理分析與方案設(shè)計(jì)
3.1 故障診斷原理分析
為完成對該問題的診斷,從站間雙向時(shí)間同步的基本原理出發(fā),分析影響站間時(shí)間同步處理的主要因素,在此基礎(chǔ)上對造成站間時(shí)間同步結(jié)果無法閉合的原因進(jìn)行定位。
由于GEO衛(wèi)星的軌道高度約為36 000 km,當(dāng)任意2站之間的距離不超過100 m時(shí),2站與衛(wèi)星之間的夾角可近似為0°,即從衛(wèi)星的角度來看,地面各個(gè)觀測站位置是重合的,可稱為“零基線”狀態(tài)。此時(shí),式(1)右側(cè)參數(shù)中,除2站鐘差和設(shè)備時(shí)延外,其余參數(shù)接近于完全對稱,可以相互抵消,式(1)可簡化為:
(3)
此時(shí)衛(wèi)星雙向時(shí)間比對鐘差僅與觀測偽距、設(shè)備時(shí)延有關(guān),對式(3)做進(jìn)一步變換:
(4)
在零基線條件下,2個(gè)站點(diǎn)間的鐘差可以通過實(shí)際測定的方式直接得到,此時(shí)可以通過觀測偽距和時(shí)間同步站實(shí)測鐘差來獲得2個(gè)時(shí)間比對站的設(shè)備組合時(shí)延[10],令:
(5)
式中,τAB為參與衛(wèi)星雙向時(shí)間比對站A,B之間的設(shè)備組合時(shí)延。
根據(jù)前述介紹,站間時(shí)間同步試驗(yàn)系統(tǒng)中共有A,B,C三個(gè)站參與衛(wèi)星雙向時(shí)間比對,因此可以獲得3個(gè)設(shè)備組合時(shí)延τAB,τAC,τBC。
設(shè)備時(shí)延是指信號在設(shè)備中的傳輸時(shí)間,在正常情況下是一個(gè)相對穩(wěn)定、變化緩慢的量值。根據(jù)式(5),A,B,C三個(gè)站設(shè)備組合時(shí)延閉合差為0,
(6)
若由于設(shè)備自身故障導(dǎo)致站間時(shí)間同步閉合結(jié)果發(fā)生跳變,則會反映在設(shè)備時(shí)延上,3站設(shè)備組合時(shí)延將不閉合,這是基于設(shè)備組合時(shí)延穩(wěn)定性分析站間時(shí)間同步閉合結(jié)果跳變的基礎(chǔ)。由于3個(gè)站參與時(shí)間比對,若A站設(shè)備出現(xiàn)異常,則設(shè)備組合時(shí)延τAB,τAC均會出現(xiàn)問題,而τBC則保持正常,因而按照上述方法設(shè)計(jì),可以直接定位有問題的時(shí)間同步站。
3.2 診斷方案設(shè)計(jì)
設(shè)計(jì)站間時(shí)間同步結(jié)果跳變問題診斷方案如圖5所示。
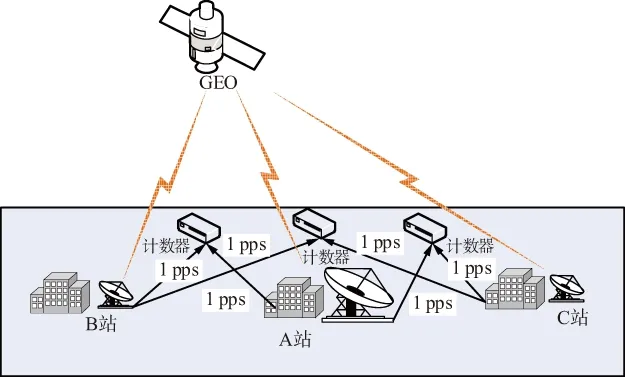
圖5 站間時(shí)間同步閉合結(jié)果跳變問題診斷方案
同一場區(qū)的A,B和C衛(wèi)星雙向時(shí)間同步站之間的參考時(shí)間信號兩兩之間通過計(jì)數(shù)器直接測量,并記錄各站的觀測偽距,根據(jù)式(4)可計(jì)算得到3個(gè)設(shè)備組合時(shí)延τAB,τAC,τBC。
為將站間時(shí)間同步閉合結(jié)果跳變問題觸發(fā),結(jié)合設(shè)備實(shí)際運(yùn)行狀態(tài),設(shè)計(jì)5個(gè)場景下的衛(wèi)星雙向時(shí)間比對設(shè)備組合時(shí)延測定工作,包括:
① 正常運(yùn)行條件下的站間組合時(shí)延差測量
不對設(shè)備運(yùn)行狀態(tài)做任何改變,選取一段時(shí)間進(jìn)行組合時(shí)延測量工作。
② 衛(wèi)星雙向時(shí)間同步設(shè)備開關(guān)機(jī)條件下的站間組合時(shí)延差測量
主要對參與試驗(yàn)的各個(gè)站衛(wèi)星雙向時(shí)間同步設(shè)備、對發(fā)射和接收終端依次進(jìn)行多次開關(guān)機(jī),統(tǒng)計(jì)各次開關(guān)機(jī)前后的組合時(shí)延。
③ 時(shí)頻設(shè)備開關(guān)機(jī)條件下的站間組合時(shí)延差測量
主要對參與試驗(yàn)的各個(gè)站的時(shí)頻設(shè)備多次開關(guān)機(jī),統(tǒng)計(jì)各次開關(guān)機(jī)前后的組合時(shí)延。
④ 時(shí)頻設(shè)備輸出1 pps相位調(diào)整條件下的站間組合時(shí)延差測量
主要對參與試驗(yàn)的各個(gè)站的時(shí)頻設(shè)備輸出的1 pps信號進(jìn)行多次移相,統(tǒng)計(jì)各次移相前后的組合時(shí)延。
⑤ 時(shí)頻設(shè)備互換條件下的站間組合時(shí)延差測量
主要對參與試驗(yàn)的各個(gè)站的時(shí)頻設(shè)備進(jìn)行互換,統(tǒng)計(jì)互換前后的組合時(shí)延。
4 實(shí)驗(yàn)過程與問題定位
4.1 實(shí)驗(yàn)過程
按照方案設(shè)計(jì)分別進(jìn)行如下試驗(yàn):
① 正常運(yùn)行條件下的站間組合時(shí)延差測量。
② 設(shè)備開關(guān)機(jī)前后站間組合時(shí)延差測量,包括開關(guān)各站站間發(fā)射終端、開關(guān)各站站間接收終端。
③ 時(shí)頻設(shè)備開關(guān)機(jī)前后站間組合時(shí)延差測量,包括開關(guān)B站、C站時(shí)頻設(shè)備第1次;開關(guān)B站、C站時(shí)頻設(shè)備第2次;開關(guān)A站時(shí)頻設(shè)備第1次;開關(guān)A站時(shí)頻設(shè)備第2次。
④ 1 pps相位調(diào)整前后站間組合時(shí)延差測量
1 pps相位調(diào)整主要針對A站、B站時(shí)頻設(shè)備的輸出的1 pps信號相對于10 MHz信號進(jìn)行了調(diào)整,各次調(diào)整量如表1所示。
表1 精調(diào)1pps相位命令設(shè)置量
Tab.1 Fine tuning 1 pps phase command setting amount
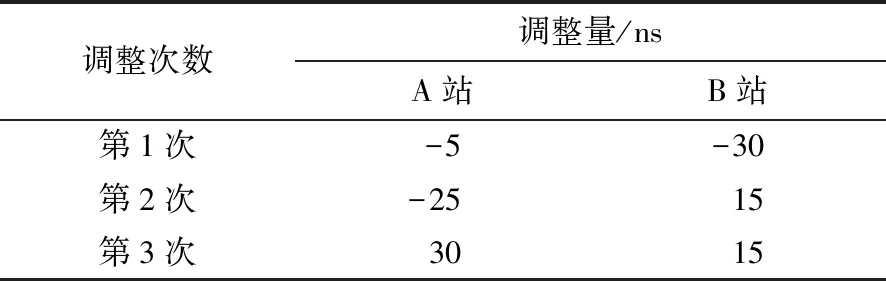
調(diào)整次數(shù)調(diào)整量/nsA站B站第1次-5-30第2次-2515第3次3015
⑤ 時(shí)頻設(shè)備互換前后站間組合時(shí)延差測量,包括互換B站和C站的原子鐘;將B站和C站的原子鐘恢復(fù)到初始連接狀態(tài)。
4.2 實(shí)驗(yàn)結(jié)果與問題定位
將各站觀測偽距和測量鐘差按照式(4)依次計(jì)算設(shè)備組合時(shí)延τAB,τCA,τBC,并對各次結(jié)果進(jìn)行平均值計(jì)算,結(jié)果如表2所示。
表2 各種場景下的組合時(shí)延標(biāo)定結(jié)果

Tab.2 Combined delay calibration results for various scenarios
按照靜態(tài)拷機(jī)、站間設(shè)備開關(guān)機(jī)、時(shí)頻系統(tǒng)開關(guān)機(jī)、1 pps相位調(diào)整、時(shí)頻切換試驗(yàn)順序聯(lián)立的τAB,τCA,τBC以及三者的閉合結(jié)果原始數(shù)據(jù)如圖6~圖9所示。
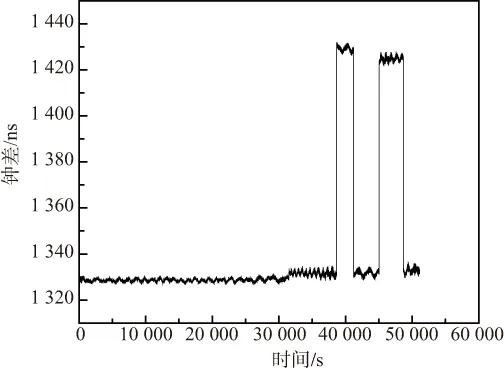
圖6 τAB設(shè)備組合時(shí)延

圖7 τCA設(shè)備組合時(shí)延

圖8 τBC設(shè)備組合時(shí)延
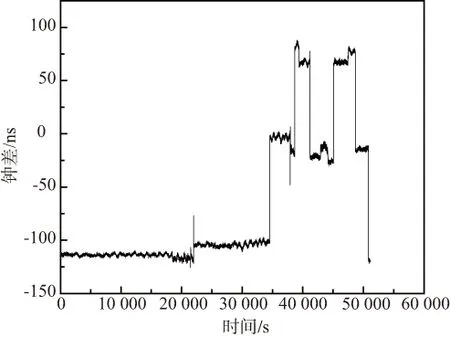
圖9 3站設(shè)備組合時(shí)延閉合差
由圖9可以看出,3站設(shè)備組合時(shí)延閉合結(jié)果存在以0值為中心的±100 ns的跳變。結(jié)合表2以及圖6~圖8可以看出,τBC結(jié)果基本穩(wěn)定,但τAB,τCA均存在出現(xiàn)設(shè)備時(shí)延跳變的情況(表2中下劃線示出),因此可判定該問題由A站設(shè)備引起。由于組合時(shí)延按除2處理,表明A站站間觀測數(shù)據(jù)跳變?yōu)?00 ns左右。
由于設(shè)備測量一致性、時(shí)頻設(shè)備進(jìn)行1 pps相位調(diào)整等原因,各次場景之間測試結(jié)果存在10 ns量級左右的波動,屬于正常現(xiàn)象,不對試驗(yàn)結(jié)果造成影響。
4.3 機(jī)理分析
偽碼測距的過程由接收處理單元實(shí)現(xiàn),一個(gè)典型的接收處理單元一般由A/D模塊、FPGA模塊、DSP模塊、時(shí)鐘管理模塊、電源模塊及串行通信接口模塊等組成,如圖10所示。

圖10 信號接收處理單元組成原理
偽碼測距過程的核心是對信號的捕獲和跟蹤,捕獲是對頻率和碼相位參數(shù)的粗略估計(jì),跟蹤的目的是使這些估計(jì)值精確化[11]。從偽碼的整個(gè)搜索及環(huán)路跟蹤控制過程來看,可以分為步進(jìn)搜索相位調(diào)整和環(huán)路DDS相位微調(diào)跟蹤處理階段,前一個(gè)階段的處理包含搜索、捕獲,可以直接獲得以時(shí)間基準(zhǔn)點(diǎn)為起點(diǎn)的整數(shù)個(gè)偽碼碼片數(shù);環(huán)路進(jìn)入跟蹤狀態(tài)后,由初始跟蹤逐漸過渡到精跟蹤處理,一個(gè)碼片以內(nèi)的微小相位的跟蹤調(diào)整量,可從跟蹤環(huán)路中直接獲得并在時(shí)域進(jìn)行實(shí)現(xiàn)積累,在需要輸出偽距觀測量時(shí),適時(shí)地依照觀測時(shí)刻打上時(shí)間標(biāo)記后即可采樣輸出,即偽距觀測值=整碼片數(shù)(捕獲階段)+小數(shù)部分(跟蹤階段)。
該站間時(shí)間同步系統(tǒng)偽碼速率為5 Mcps,單個(gè)碼片的持續(xù)時(shí)間碼長為200 ns,而A站設(shè)備的組合時(shí)延跳變量均為200 ns左右,且全部發(fā)生在不同的試驗(yàn)場景之間,單次試驗(yàn)過程中并未發(fā)生跳變,因此判定A站站間測距終端在信號捕獲階段計(jì)算整數(shù)個(gè)偽碼碼片時(shí),存在1個(gè)碼片的不確定性。根據(jù)上述結(jié)論對接收終端的FPGA和DSP設(shè)計(jì)程序進(jìn)行了排查,發(fā)現(xiàn)其程序設(shè)計(jì)上存在錯(cuò)誤,使得在信號捕獲確定整數(shù)個(gè)碼片時(shí)產(chǎn)生了1個(gè)碼片的偏差,對設(shè)備進(jìn)行改正后,該問題消失。
5 結(jié)束語
衛(wèi)星雙向時(shí)間同步技術(shù)的優(yōu)點(diǎn)在于雙向測量鏈路具有較好的對稱性,大部分誤差可以抵消,在零基線條件下,鏈路接近完全對稱,鐘差比對模型進(jìn)一步退化為觀測量、實(shí)際鐘差和設(shè)備時(shí)延三方面因素之間的關(guān)系。由于零基線條件下觀測量和實(shí)測鐘差是直接可測量的,則設(shè)備時(shí)延可被精確標(biāo)定,通過觀察設(shè)備時(shí)延閉合與變化情況可對設(shè)備故障情況進(jìn)分析定位。
本實(shí)驗(yàn)?zāi)軌颢@得成功的關(guān)鍵在于:① 零基線條件下鐘差可以直接測定,組合時(shí)延的測定較易實(shí)現(xiàn);② 3個(gè)時(shí)間同步站可以兩兩進(jìn)行組合,當(dāng)只有1個(gè)站出現(xiàn)故障時(shí)可以進(jìn)行定位,當(dāng)僅有2個(gè)站時(shí),將會出現(xiàn)只能檢錯(cuò)而不能判錯(cuò)的情況。為使本方法更加具有普遍性,如不具備零基線條件時(shí),可以采用其他鏈路,如GNSS共視和PPP精密時(shí)間比對等精度較高、代價(jià)較小的手段獨(dú)立測定鐘差,仍可實(shí)現(xiàn)遠(yuǎn)距離條件下的組合時(shí)延標(biāo)定,從而實(shí)現(xiàn)對衛(wèi)星雙向同步系統(tǒng)的故障檢測或定位。
猜你喜歡
中國特種設(shè)備安全(2022年6期)2022-09-20 02:52:28
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價(jià)·高一版(2020年6期)2020-11-02 02:45:24
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年11期)2018-08-04 03:26:08
電子制作(2018年11期)2018-08-04 03:25:42
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
工業(yè)設(shè)計(jì)(2016年12期)2016-04-16 02:52:00
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21